Изобретение относится к области локального инженерно-геологического и геоэкологического аэромониторинга объектов природно-техногенной сферы, находящихся в зоне технической ответственности производственных подразделений нефтегазодобывающей отрасли, в частности в зоне месторождений нефти, газоконденсатных месторождений, нефте- и газотранспортных систем.
Одной из главных причин, обуславливающих угрозу экологической безопасности России при выполнении буровых разведочных работ, разработке и освоении нефтегазовых месторождений в труднодоступных и удаленных районах Севера, является сложность проведения и несовершенство систем геоэкологического и инженерно-геологического мониторинга. Нарушения технологии освоения месторождений, изношенность оборудования вызывает техногенные аварии в промысловых зонах и на трубопроводах. Это неизбежно приводит к необратимой деградации целостных экосистем криолитозоны, особо чувствительных к антропогенным нагрузкам. Актуальны задачи не только индикации и картографирования таких объектов, но в первую очередь выявление причин и факторов нарушения экологической безопасности, а также разработка превентивных мероприятий по предотвращению таких угроз на ранней фазе их развития. Создание высокоэффективной системы локального аэромониторинга магистральных трубопроводов в труднодоступных районах особенно актуально при необходимости оперативного реагирования на аварийные ситуации, вызванные природными и техногенными катастрофами. Кроме того, в равной мере актуальна задача прогнозирования аварийных ситуаций на инженерных объектах высокого техногенного воздействия. Решение этих задач может быть достигнуто с помощью системы со сверхвысоким пространственным и спектральным разрешением, размещенной на борту летательных аппаратов класса «Ультра лайт», обеспечивающих условия для локального аэромониторинга на предельно малых высотах (до 300 м) с оптимальными скоростями пилотирования.
Известны бортовые комплексы, обеспечивающие технологию аэросъемки контролируемой территории, сбора и обработки полученной информации (DE 19919487, МПК G01C 11/02; DE 4419359, МПК G01C 11/04) путем выполнения покадровой съемки, позиционирования с помощью данных глобальной спутниковой системы и датчиков, установленных на борту летательного аппарата. Указанные бортовые программно-аппаратурные комплексы предназначены для создания и обновления топографических карт и планов, а также для получения стереомоделей рельефа и являются экономически неэффективными при мониторинге антропогенных геотехнических систем линейного типа, например внутрипромысловых трубопроводов, с целью дефектоскопии и прогнозирования возможных аварийных ситуаций.
Для реализации способа дистанционного обнаружения утечек жидких углеводородов из трубопроводов (RU 2079772, МПК 6 F17D 5/02, G01J 3/44) применен бортовой комплекс, в котором в качестве основного средства съемки применена тепловизионная камера. Однако для создания картографических материалов крупнее масштаба 1:50000 разрешающая способность указанной камеры недостаточна. Кроме того, исходя из состава бортового комплекса можно предположить, что привязка данных и уверенное пилотирование проблематичны.
Бортовой комплекс (RU 222727, МПК 7 G01C 11/00 - ближайший аналог) для локального аэромониторинга геотехнических систем включает блок аэровизуального наблюдения объекта съемки на базе курсовой камеры и съемочной TV-камеры высокого разрешения. Блок выполнен в виде размещенной по продольной оси летательного аппарата демпфирующей платформы, содержащей коаксиально расположенные неподвижное и поворотное кольцо с установленной на нем с возможностью вращения в вертикальной плоскости курсовой камеры. Съемочная камера установлена с возможностью перемещения на любое из колец. В штатном режиме съемки съемочная камера установлена на неподвижном кольце так, что оптические оси обеих камер лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. При режиме ветрового воздействия съемочная камера установлена на поворотном кольце и развернута на угол компенсации угла ветрового скольжения. Бортовой комплекс также включает блок управления полетом по плану местности, снабженный бортовыми компьютерами и системой определения навигационных данных на базе GPS-приемника и датчиков углов поворота камер. Блок аэровизуального наблюдения соединен с блоком управления полетом с возможностью синхронного позиционирования на видеомониторах информации от обеих камер
Аппаратно-конструктивные характеристики устройства не позволяют обеспечить требуемых показателей по дисторсии, пространственному и спектральному разрешению. Это исключает возможность применения методов фотограмметрической обработки выходной информации, а также автоматизированной векторизации изображений при тематическом дешифрировании. Кроме того, исключена возможность создания ортофотопланов местности, для чего необходимо получение стереопар с заданным продольным и поперечным перекрытием.
Задачей заявляемого технического решения является расширение функциональных возможностей системы, заключающейся в достижении требуемых показателей по дисторсии, пространственному и спектральному разрешению, а также возможности создания ортофотопланов местности при одновременном повышении эффективности системы.
Решение указанной задачи достигается тем, бортовая система локального аэромониторинга объектов природно-техногенной сферы, включающая связанные с бортовым компьютером блок управления полетом по плану местности и по навигационным данным GPS-приемника, а также оптический блок на базе аэросъемочной и курсовой камер высокого разрешения, в отличие от прототипа оснащена оптическим блоком с цифровыми камерами с возможностью вращения одной из камер в плоскости оптических осей камер. Оптический блок установлен на траверсе, выполненной в виде модульной конструкции, каждый модуль которой снабжен приводом вращения в ортогональной плоскости, причем оптический блок установлен на модуле с возможностью вращения в вертикальной плоскости с помощью привода с изменяемой полярностью, а модуль с приводом вращения в горизонтальной плоскости установлен на опорно-поворотном в вертикальной плоскости кронштейне, снабженном механизмом стопорения в заданном положении, кроме того, система дополнительно снабжена связанным со всеми блоками дистанционным командным прибором, а также синхронизатором таймеров камер оптического блока и GPS-приемника.
Решение указанной задачи достигается также тем, что:
- система установлена на борту мотодельтаплана;
- курсовая камера установлена в оптическом блоке с возможностью вращения в плоскости оптических осей камер;
- курсовой камерой является TV-камера;
- система снабжена гироскопическим нивелиром, связанным с командным прибором;
- опорно-поворотный кронштейн установлен с возможностью контроля установки угла поворота с помощью установленной соосно с ним неподвижной угломерной панелью;
- в командном приборе установлено управляемое концевыми выключателями реле, изменяющее полярность привода;
- упоры концевых выключателей регулируемые;
- в командном приборе установлен таймер, соединенный с приводом с изменяемой полярностью;
- в командном приборе установлен тумблер для фотосъемки с одиночной экспозицией;
- таймеры камер оптического блока и GPS-приемника откалиброваны по атомным часам сервера точного времени.
Оснащение оптического блока цифровыми камерами высокого разрешения (курсовой TV-камерой и аэросъемочной) обеспечивает синхронное получение высококачественных цветных цифровых фотокадров с разрешением не менее 9 мегапикселей на ПЗС матрицу 2/3 дюйма с заданным продольным и поперечным перекрытием и телеинформацию. Кроме того, минимизируются весовые и габаритные показатели оптического блока. В совокупности с уменьшением веса конструкции поворотной платформы по сравнению с прототипом это является важным фактором для летных характеристик носителя системы, таких как взлетный вес, потребление топлива, скорость, безопасность.
Установка оптического блока на траверсе, выполненной в виде модульной конструкции, каждый модуль которой снабжен приводом вращения в ортогональной плоскости, когда оптический блок установлен на модуле с возможностью вращения в вертикальной плоскости с помощью привода с изменяемой полярностью, позволяет, помимо возможности вращения оптического блока в горизонтальной плоскости, осуществить дополнительную возможность поворота оптического блока в вертикальной плоскости. Таким образом обеспечено двухкоординатное перемещение установленного на траверсе оптического блока. С помощью привода с изменяемой полярностью обеспечивается ритмичное качание оптического блока в плоскости, перпендикулярной съемочному галсу, с отклонением на заданный угол, что позволяет сканировать полосу съемки с требуемой для обеспечения покрытия периодичностью. Установленное в командном приборе управляемое концевыми выключателями реле изменяет полярность привода при возможности изменения угла поворота оптического блока с помощью регулировки упор концевых выключателей. При этом в командном приборе установлен таймер, подсоединенный к приводу с изменяемой полярностью для задания периодичности изменения полярности.
Установка курсовой TV-камеры с возможностью вращения в плоскости оптических осей камер обеспечивает установку предварительно рассчитанного, исходя из требований решаемой задачи, угла рассогласования оптических осей камер. Установка расчетного угла рассогласования оптических осей камер в совокупности с вращением оптического блока в ортогональных плоскостях, с фиксацией опорно-поворотного кронштейна в заданном положении и с вращением оптического блока в вертикальной плоскости с помощью привода с изменяемой полярностью позволяет выполнять различные режимы локального аэромониторинга: получение серии снимков с заданным продольным перекрытием при выполнении маршрутной съемки линейных объектов с компенсацией угла разворота платформы при ветровом сносе летательного аппарата и, соответственно, отклонении оси летательного аппарата от направления съемочного галса; получение серии снимков на площадные объекты при выполнении плановой съемки с заданным продольным и поперечным перекрытием при смещении оптических осей аэросъемочной аппаратуры оптического блока в плоскости, перпендикулярной направлению съемочного галса, и последующей геометрической коррекцией изображений; получение серии снимков с заданным перекрытием при выполнении съемки линейных объектов при полете мотодельтаплана вдоль объекта съемки на высоте его размещения, например вдоль воздушной линии электропередачи.
Для реализации необходимого условия функционирования съемочной аппаратуры с помощью командного прибора оптический блок по углу места и азимуту приводится в оптимальное положение по отношению к индикатриссе рассеяния объекта съемки. С помощью командного прибора также обеспечивается режим отработки углов ветрового скольжения (компенсацию угла разворота продольной оси летательного аппарата относительно съемочного галса при боковом ветре) путем поворота траверсы в горизонтальной плоскости на угол отклонения продольной оси носителя системы от съемочного галса.
Оснащение системы дистанционным командным прибором повысило эффективность процесса съемки, разделив функции задействованных в съемке лиц. В отличие от прототипа, где с одного пульта производился одновременный процесс управления и съемкой, и пилотированием, в предлагаемом техническом решении бортоператор контролирует изображение объекта съемки, показания параметров цифровых камер, данные GPS-приемника по монитору бортового компьютера и управляет съемкой с помощью дистанционного командного прибора. Пилот контролирует параметры и навигационные данные, отображаемые бортовой авионикой, не отвлекаясь от прямых функций пилотирования, что способствует повышению качества пилотирования и уровня безопасности полетов.
Заявляемая совокупность существенных признаков изобретения позволяет обеспечить съемку объектов природно-техногенной сферы в экстремальных погодных условиях, например в условиях ветровых нагрузок на летательный аппарат при высокой эффективности и высоком уровне надежности бортовой системы. Обеспечено получение достоверных изображений с требуемыми показателями по дисторсии, пространственному и спектральному разрешению, а также получение стереопар с заданным параллаксом для дальнейшей блочной триангуляции по бортовым навигационным данным с корректировкой по данным наземных геодезических измерений.
На фиг.1 представлена функциональная блок-схема бортовой системы локального аэромониторинга объектов природно-техногенной сферы.
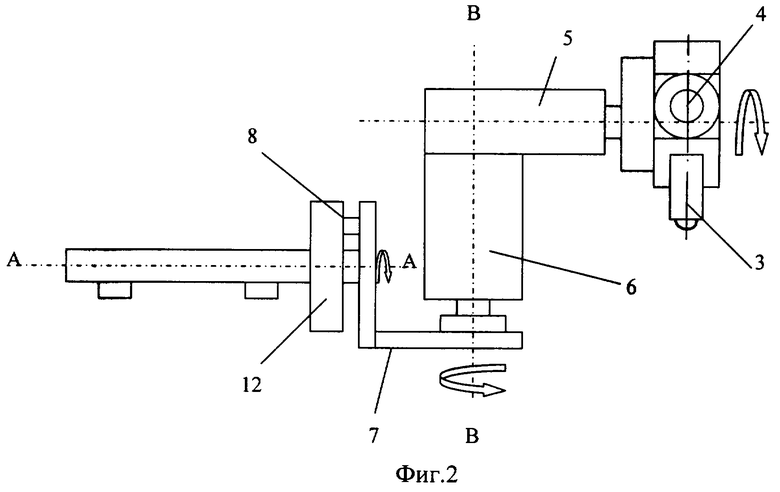
На фиг.2 изображен общий вид механической части системы (угол рассогласования оптических осей камер равен 90°).
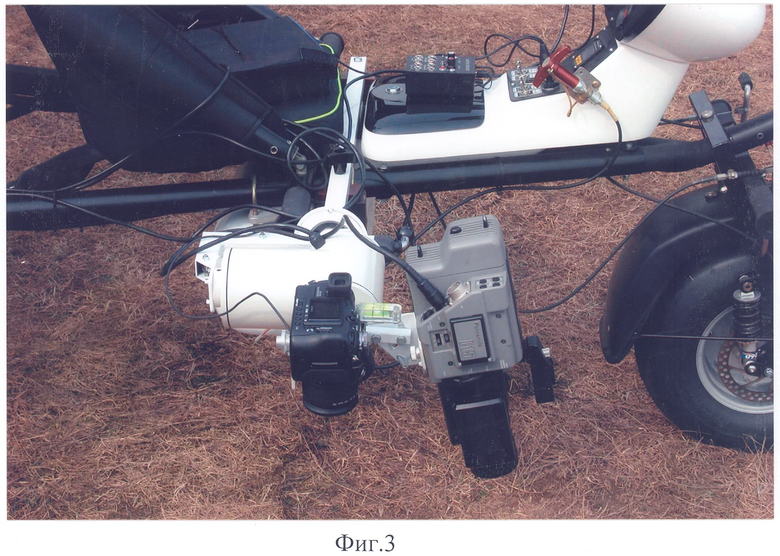
На фиг.3 представлена фотография опытного образца заявляемой бортовой системы локального аэромониторинга объектов природно-техногенной сферы.
Бортовая система локального аэромониторинга объектов природно-техногенной сферы содержит связанные с бортовым компьютером 1 блок управления полетом по плану местности и по навигационным данным GPS-приемника 2. Оптический блок оснащен цифровыми камерами высокого разрешения аэросъемочной 3 и курсовой 4 с возможностью вращения одной из камер в плоскости оптических осей камер и установлен на траверсе, выполненной в виде конструкции, составленной из модулей 5 и 6. Каждый модуль снабжен приводом вращения в ортогональной плоскости. На модуле 5 установлен оптический блок с возможностью вращения в вертикальной плоскости с помощью привода с изменяемой полярностью. Модуль 6 с приводом вращения в горизонтальной плоскости установлен на опорно-поворотном в вертикальной плоскости кронштейне 7, снабженном механизмом стопорения 8 в заданном положении. В систему дополнительно включен связанный с траверсой и всеми блоками дистанционный командный прибор 9 и синхронизатор таймеров камер оптического блока и GPS-приемника 10. Кроме того, на траверсе установлен гироскопический нивелир 11, а соосно с опорно-поворотным кронштейном 7 неподвижно установлена угломерная панель 12.
Устройство работает следующим образом.
До вылета на объект съемки с дистанционного командного прибора 11 устанавливают в надирное положение аэросъемочную камеру 3 с помощью приводов 5 и 6. Контроль осуществляется с помощью гироскопического нивелира 11, данные которого выводятся на монитор бортового компьютера 1. Положение контролируется визуально по изображению эталонного объекта на мониторе. С помощью синхронизатора таймеров 10 по атомным часам сервера точного времени синхронизируются таймеры бортового GPS-приемника 2 и цифровых камер 3 и 4 оптического блока. С дистанционного командного прибора 9 вводятся расчетные параметры частоты одиночной экспозиции, диафрагмы и фокусного расстояния объектива цифровой аэросъемочной камеры 3. Калибруется баланс белого по внутреннему или внешнему эталону. Производится выставление оптимального угла рассогласования оптических осей аэросъемочной камеры 3 и курсовой TV-камеры 4.
После отработки исходных параметров с дистанционного командного прибора подается команда на включение курсовой цифровой TV-камеры 4. Качество съемки контролируется по монитору бортового компьютера. В процессе съемки с дистанционного командного прибора с помощью таймера подаются команды на срабатывание затвора цифровой аэросъемочной камеры с задержкой времени, обеспечивающей расчетное продольное перекрытие при надирной съемке линейных объектов. Качество съемки и текущие параметры работы камер оптического блока отслеживаются бортоператором по монитору бортового компьютера 2. В процессе съемки с дистанционного командного прибора 9 подаются команды на привод 6 разворота траверсы по азимуту (в том числе для отработки углов ветрового скольжения) и разворота по углу места с помощью привода 5. При необходимости увеличения ширины трассы съемки опорно-поворотный кронштейн 7 разворачивается на 90° по оси АА и фиксируется механизмом стопорения 8. При этом ось ВВ принимает горизонтальное положение. Аэросъемочная камера приводится в надирное положение по команде с дистанционного командного прибора 9. С командного прибора задается значение скорости отклонения оптической оси от надирного положения цифровой аэросъемочной камеры в вертикальной плоскости, перпендикулярной направлению съемочного галса, в режиме сканирования трассы. Этим достигается получение видеокадров с заданным поперечным и продольным перекрытием для последующей геометрической коррекции и блочной триангуляции с использованием данных наземных геодезических измерений. Покадровая цифровая информация поступает в блок памяти Memory Stick 4 Gb. Цифровая информация и данные GPS-приемника 2 поступают в бортовой компьютер 1.
После взлета и выхода на стационарную траекторию полета проводится корректировка горизонтального положения траверсы описанным выше способом. Бортовой компьютер переключается в режим «цифровая аэросъемочная камера» при ее надирном положении. По монитору отслеживается траектория перемещения подсамолетных ландшафтных опознавательных знаков относительно штриховых осей координат на экране монитора. В случае отклонения трассы от параллельного перемещения относительно оси «У», проводится корректировка положения камер оптического блока с дистанционного командного прибора 9. Цифровая курсовая TV-камера 4 включается с дистанционного командного прибора и непрерывно передает данные в бортовой компьютер 1. Цифровая информация от GPSmap 76CS поступает с заданной частотой в бортовой компьютер по USB входу. Цифровая информация от аэросъемочной камеры 3 поступает в Memory Stick PRO Duo 4 Gb. Сброс данных в бортовой компьютер, содержащий электронную карту местности с проложенными аэросъемочными маршрутами, точками наземных геодезических измерений, объектами локального мониторинга в соответствии с поставленной функциональной задачей, осуществляется после завершения очередного цикла дистанционного зондирования. В процессе полета путевая точка выводится в центр экрана (начало прямоугольных координат на экране монитора GPSmap 76CS) и совмещается программным путем с перемещающейся электронной картой местности согласно параметрам полета летательного аппарата. Съемка трассы, превышающей ширину отдельного кадра, осуществляется путем качания оптического блока с расчетной частотой в вертикальной плоскости с помощью привода с изменяемой полярностью 5. Оптический блок приводится в режим с помощью управляемого концевыми выключателями реле, меняющего полярность электродвигателя с заданной таймером периодичностью.
Таким образом, за счет достижения технического результата - получения высококачественных и достоверных изображений с требуемыми показателями по дисторсии, пространственному и спектральному разрешению, а также возможности создания ортофотопланов местности при значительной экономии летного времени достигается решение поставленной задачи, а именно: расширение функциональных возможностей системы, повышение ее эффективности, снижение веса и габаритов аппаратуры, уменьшение энергопотребления и повышение уровня надежности системы в экстремальных условиях эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2307324C1 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| МУНИЦИПАЛЬНАЯ ГЕОИНФОРМАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2571919C2 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| Способ создания цифрового топографического фотодокумента и комплексное средство для осуществления этого способа | 2017 |
|
RU2665250C2 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2428722C2 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
Изобретение относится к области локального инженерно-геологического и геоэкологического аэромониторинга. Бортовая система локального аэромониторинга объектов содержит связанные с бортовым компьютером блок управления полетом по плану местности и по навигационным данным GPS-приемника, оптический блок, оснащенный цифровыми камерами высокого разрешения и установленный на траверсе. Причем траверса выполнена в виде конструкции, составленной из модулей. Каждый модуль снабжен приводом вращения в ортогональной плоскости. На модуле с возможностью вращения в вертикальной плоскости установлен оптический блок. Модуль с возможностью вращения в горизонтальной плоскости установлен на опорно-поворотном в вертикальной плоскости кронштейне, снабженном механизмом стопорения в заданном положении. Технический результат - расширение функциональных возможностей системы, заключающийся в достижении требуемых показателей по дисторсии, пространственному и спектральному разрешению, а также возможности создания ортофотопланов местности при одновременном повышении эффективности системы. 12 з.п. ф-лы, 3 ил.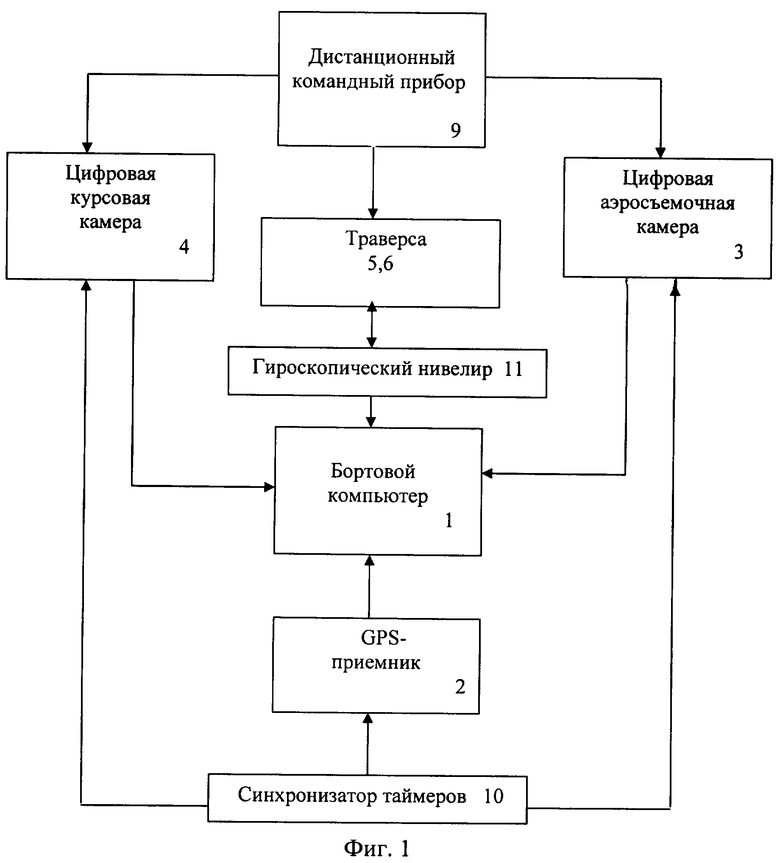
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
| US 4825232 A, 25.04.1989 | |||
| US 5752112 A, 12.05.1998 | |||
| US 5589901 A, 31.12.1996. | |||

