Изобретение относится к средствам механизации технологических процессов и может быть использовано в составе машин с остановками рабочих или исполнительных органов, в частности к шарнирно-рычажным механизмам, которые обеспечивают при функционировании остановки выходных звеньев на одной из границ интервалов движения.
Известен, например, шестизвенный шарнирно-рычажный механизм с одной остановкой выходного звена, созданный путем использования шатунной кривой базового шарнирного четырехзвенника, которая на определенном участке является (приближенно совпадает) дугой одного радиуса. Такие шестизвенники способны обеспечивать выстой заданной продолжительности практически в любой части интервала кинематического цикла, что является их достоинством (Основы расчета и конструирования машин и автоматов пищевых производств. - М.: Машиностроение, 1969. / Под ред. А.Я.Соколова. - С.515, рис.XX-43, а)).
Основным недостатком данного механизма является большое число подвижных звеньев и низших кинематических пар и сравнительная громоздкость синтезирования многозвенника по шатунной кривой. Следствием этого являются завышенные энергозатраты на осуществление процесса, малая частота повторения рабочих циклов и невысокая точность выполнения выстоя. Кроме того, в таких механизмах достаточно сложно обеспечить заданный закон движения выходного звена.
Механизмы с одной остановкой выходного звена в периоде кинематического цикла широко применяются для выполнения ряда вспомогательных (передаточных) операций в процессах многих производств. В частности, для перемещения столов, плит, тележек, толкателей, выполняющих функцию выходных звеньев и несущих технологическую нагрузку. Такие механизмы, как правило, являются многозвенными с малым временем на совершение холостого хода и выстоем на границе интервалов движения, т.е. между холостым и рабочим ходами. При этом на другой границе интервалов движения (между рабочим и холостым ходами) выходное звено совершает мгновенный выстой, связанный с изменением направления скорости его движения. Движение выходного звена с выстоем определенной продолжительности по завершении холостого хода (до начала рабочего хода) определяется требованиями выполняемого процесса, например временем подачи на выходное звено (стол) объекта, подлежащего передаче из одной позиции в другую.
Известен, например, многозвенный рычажный механизм с прямолинейным движением выходного звена в горизонтальном направлении для передачи пустых опок в литейном производстве, выполненный в виде комбинированного механизма, который содержит двигательный механизм (пневмо- или гидропривод) и коромысловый шатунно-ползунный передаточный механизм, выполняющий функцию исполнительного механизма (Горский А.И. Расчет машин и механизмов автоматических линий литейного производства. - М.: Машиностроение, 1976. - С.390, рис.10.24).
Основной недостаток данного механизма является следствием сложной структуры кинематической цепи комбинированного механизма и необходимости применения пневмо- или гидропривода в составе двигательного механизма. Усложненность кинематической цепи увеличивает число движущихся масс звеньев, что предопределяет рост энергозатрат на осуществление процесса, уменьшение частоты повторения рабочих циклов и соответственно производительности. Применение пневмо- или гидропривода, вызванное необходимостью обеспечения выстоя выходного звена определенной продолжительности и в заданной части кинематического цикла, значительно усложняет систему механизации процесса передачи изделий.
Задачей настоящего изобретения является упрощение конструкции и повышение точности функционирования механизма.
Решение поставленной задачи достигается тем, что в механизме с выстоем выходного звена, выполненном в виде шарнирно-рычажного механизма, содержащем связанное с приводом ведущее звено и выходное звено, выполненное с возможностью выстоя перед началом рабочего хода, шарнирно-рычажный механизм выполнен в виде трехзвенника, содержащего ведущее звено в виде кривошипа, выходное звено, выполненное в виде горизонтально расположенного стола, снабженного силовым упругим элементом и вертикально расположенной панелью с пазом для сопряжения с кривошипом, и стойку, при этом упомянутое сопряжение осуществляется при рабочем ходе стола, а холостой ход последнего выполняется посредством силового упругого элемента.
Стол смонтирован на неподвижных направляющих, при этом он сопряжен с последними посредством тел качения, размещенных в продольных канавках, выполненных в теле стола и направляющих.
Панель крепится к нижней поверхности стола соосно продольной оси стола в концевой его части, при этом панель выполнена толстостенной, а паз в теле панели выполнен тупиковым в верхней его части.
На свободном конце кривошипа смонтирован ролик для сопряжения с пазом панели, при этом центр вращения кривошипа лежит на линии, проходящей по нижней кромке панели.
Неподвижные направляющие для стола закреплены на опорах с резьбовыми муфтами, при этом направляющие снабжены поперечными растяжками между ними.
Панель снабжена фланцами для жесткого крепления ее к столу, при этом упомянутое крепление выполнено разъемным.
Силовой упругий элемент выполнен в виде пружины растяжения, один конец которой закреплен на боковине вертикально расположенной панели, а другой - на стержне, жестко закрепленном на одной из растяжек между неподвижными направляющими для стола.
На конце каждой направляющей, соответствующем положению стола в начале рабочего хода, закреплен гуммированный резиной упор.
Движение стола при рабочем ходе удовлетворяет следующим зависимостям:



где Х - перемещение стола;
r - длина кривошипа;
ϕ - угол поворота кривошипа, отсчитываемый от середины интервала рабочего хода;
v - скорость стола;
а - ускорение стола.
Предлагаемый механизм выполнен с минимально возможным числом подвижных звеньев, которыми являются ведущий кривошип, закрепленный на валу привода, и выходное звено, выполненное в виде горизонтального стола, сопряженного с кривошипом. Уменьшение числа подвижных звеньев, т.е. уменьшение движущихся масс, не ухудшает закона движения выходного звена предлагаемого механизма, оно является технически целесообразным решением, поскольку упрощает конструкцию механизма и способствует уменьшению энергозатрат на его функционирование.
Оснащение выходного звена (стола) силовым упругим элементом и вертикально расположенной панелью с пазом для сопряжения с кривошипом обеспечивает такое взаимодействие звеньев (кривошипа и стола), при котором интервал рабочего хода стола обеспечивается при сопряжении кривошипа с пазом панели, а холостой ход стола выполняется воздействием на него силового упругого элемента, при этом кривошип продолжает вращение без сопряжения с пазом панели. Такое "избирательное" (прерывистое) взаимодействие кривошипа и выходного звена обеспечивает условия, при которых стол по завершении холостого хода выстаивает, т.е. совершает выстой определенной продолжительности до начала рабочего хода. В интервале выстоя осуществляется подача (загрузка) на стол объектов или изделий, подлежащих передаче в другую позицию.
Взаимодействие горизонтального стола с неподвижными направляющими посредством тел качения, размещенных в продольных канавках, выполненных в теле стола и направляющих, снижает вредные сопротивления от сил трения при рабочем ходе стола. Канавки в направляющих выполнены сквозными, т.е. по всей длине (для технологичности изготовления). В теле стола канавки выполнены тупиковыми по концам стола, это исключает выпадание тел качения из канавок при движении стола.
Панель с пазом является конструктивным элементом выходного звена, обеспечивающим прерывистую связь последнего с кривошипом. Крепление панели соосно продольной оси стола способствует его симметричному нагружению при взаимодействии кривошипа с пазом и исключает возможные при этом перекосы. Крепление панели к нижней поверхности стола в концевой его части обеспечивает компактность механизма, а выполнение паза тупиковым в верхней его части принято из условия прочности боковин (щек) паза при силовом взаимодействии их с кривошипом.
Ролик на свободном конце кривошипа явятся типовым элементом высшей кинематической пары, образованной связью кривошипа с выходным звеном. Использование ролика уменьшает износ боковин паза, исключает шумовое сопровождение взаимодействия пары трения при рабочем ходе. Положение центра вращения кривошипа на линии нижней кромки панели является целесообразным, поскольку при этом исключаются удары в моменты начала и конца зацепления, т.е. в моменты входа ролика кривошипа в паз и выхода его из паза. В моменты начала и конца зацепления угол между кривошипом и средней линией паза составляет 90°. В таких условиях рабочий ход стола соответствует повороту кривошипа на 180°.
Резьбовые муфты опор для направляющих выходного звена используются при наладке т регулировке механизма, например при регулировке стола по высоте и в горизонтальной плоскости. Направляющие жестко скреплены одна с другой, по меньшей мере, четырьмя поперечными растяжками, две из которых закреплены по концам направляющих.
Оснащение панели фланцам и разъемное крепление ее к нижней поверхности стола обеспечивают жесткость ее крепления и возможность регулировки и согласования паза в теле панели с положением кривошипа.
Силовой упругий элемент, выполненный в виде пружины растяжения, обеспечивает холостой ход стола после окончания последним рабочего хода и последующего за ним мгновенного выстоя в крайнем положении. При холостом ходе стол проходит тот же путь, что и при рабочем ходе, но за значительно меньшее время. При холостом ходе стола кривошип продолжает вращение, при этом в интервале поворота кривошипа на 180° его ролик не взаимодействует с пазом панели и не препятствует движению стола под действием пружины с большой скоростью. Разность между временем поворота кривошипа на 180° и временем холостого хода стола под действием пружины и определяет собой продолжительность выстоя выходного звена перед началом рабочего хода.
Упоры, закрепленные на концах направляющих, фиксируют стол в крайнем положении после завершения им холостого хода. Для исключения жестких ударов стола упоры гуммированы резиной.
Зависимости (1)-(3) показывают, что в предлагаемом механизме выходное звено в интервале его рабочего хода (хода с технологической нагрузкой) совершает движение по синусоидальному закону, т.е. без каких-либо мягких или жестких ударов.
Предлагаемый механизм с выстоем выходного звена поясняется чертежами.
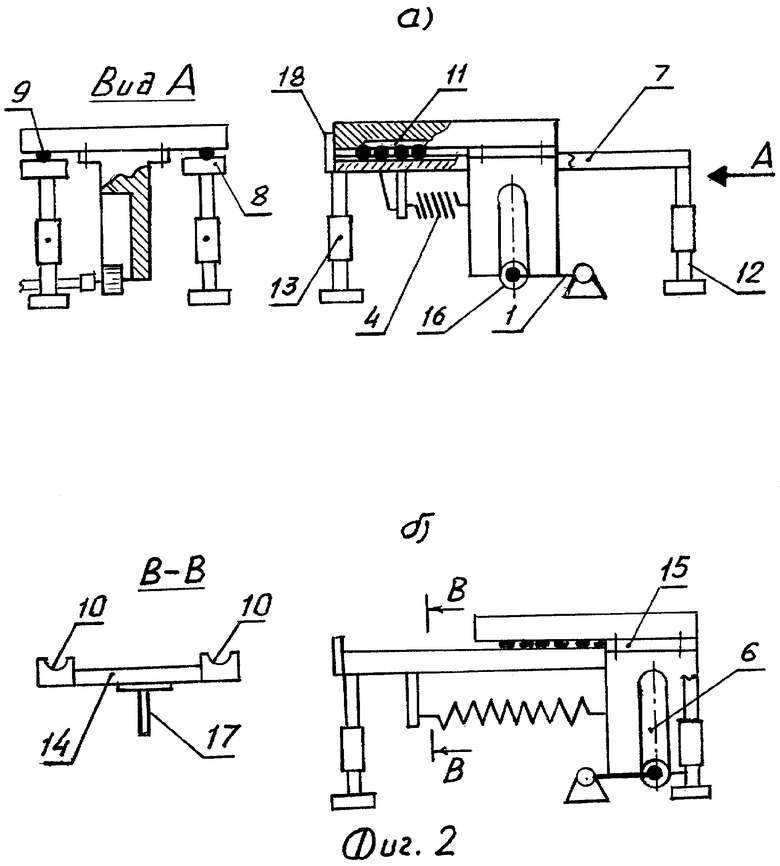
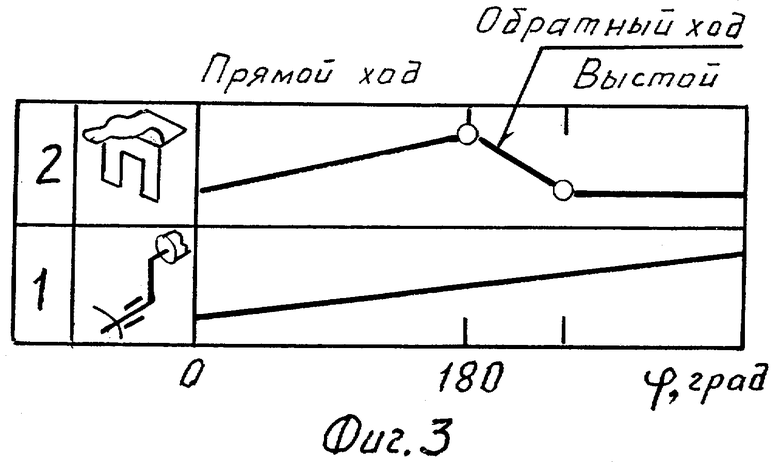
На фиг.1 представлен механизм, кинематическая схема, на фиг.2 - положения механизма: а), б) соответствуют положениям в моменты начала и конца рабочего хода; на фиг.3 - циклограмма.
Механизм выполнен в виде шарнирно-рычажного трехзвенника, содержащего ведущее звено-кривошип 1, выходное звено 2, сопряженное с кривошипом, и неподвижное звено - стойку. Выходное звено представляет собой горизонтально расположенный стол 3, выполненный с возможностью поступательного движения, который снабжен силовым упругим элементом 4 и вертикально расположенной панелью 5 с пазом 6 для связи с кривошипом. Стол 3 смонтирован на неподвижных направляющих 7 и 8 посредством тел качения - шарикоподшипников 9, размещенных в продольных канавках 10 и 11, выполненных соответственно в теле направляющих и стола (фиг.2). Направляющие 7 и 8 закреплены на опорах 12 с резьбовыми муфтами 13 для регулирования положения стола 3 по высоте и по горизонтали. Для обеспечения жесткости и выдерживания определенного расстояния между направляющими они скреплены между собой, по меньшей мере, четырьмя поперечными растяжками 14, две из которых закреплены по концам направляющих (фиг.1).
Панель 5 крепится к нижней поверхности стола 3 соосно продольной оси стола в концевой его части. Для надежности упомянутого крепления панель снабжена фланцами 15, расположенными под прямым углом к панели. Крепление панели к столу выполнено жестким, но разъемным. Панель выполнена толстостенной, а паз 6 в теле панели - тупиковым в верхней его части. Кривошип 1 жестко закреплен на валу привода, на свободном конце кривошипа смонтирован ролик 16 для сопряжения с пазом панели при рабочем ходе стола 3. Центр вращения кривошипа лежит на прямой, совпадающей с нижней кромкой панели. В моменты начала и конца рабочего хода стола кривошип занимает положение, перпендикулярное средней линии паза 6 (фиг.2).
Силовой упругий элемент 4 в виде пружины растяжения смонтирован под столом 3, один конец пружины закреплен на боковине вертикально расположенной панели 5, другой - на стержне 17, жестко закрепленном на одной из поперечных растяжек 14. В положении стола 3, соответствующем началу его рабочего хода, пружина 4 занимает сжатое положение, в положении конца рабочего хода стола пружина разжата (растянута).
В позиции конца холостого хода стола на концах направляющих 7 и 8 закреплены упоры 18, гуммированные резиной. Упоры гасят удар стола в конце холостого хода, фиксируя стол в положении, необходимом для безударного входа ролика кривошипа в паз панели.
Механизм с выстоем выходного звена работает следующим образом.
При работе привода кривошип 1 совершает вращательное движение, периодически взаимодействуя с выходным звеном 2. Начало рабочего хода выходного звена соответствует положению кривошипа, при котором ролик 16 входит в зацепление с пазом 6 панели 5, а кривошип перпендикулярен средней линии паза. В интервале поворота кривошипа на 180° ролик взаимодействует с боковинами паза, при этом выходное звено 2, несущее технологическую нагрузку, совершает рабочий ход. В интервале рабочего хода пружина 4 растягивается, аккумулируя энергию на совершение холостого хода. После поворота кривошипа на 180° ролик 16 выходит из паза, выходное звено совершает мгновенный выстой, а передаваемый объект (изделие) выводится за пределы стола 3.
По завершении рабочего хода кривошип перестает взаимодействовать с выходным звеном, при этом стол под действием пружины 4 возвращается в другое крайнее положение, совершая холостой ход. В конце холостого хода стол 3 стыкуется с упорами 18, которые фиксируют его в положении выстоя и начала рабочего хода. В интервале выстоя на стол подают объекты (изделия), подлежащие переносу в другую позицию. В интервале холостого хода стола и его выстоя кривошип совершает поворот на 180°, т.е. возвращается в положение начала рабочего хода, при котором ролик 16 вступает во взаимодействие с пазом 6 панели 5 и рабочий цикл повторяется.
Разность между временем поворота кривошипа на 180° без его взаимодействия с выходным звеном и временем холостого хода стола под действием пружины определяет собой фактическую продолжительность выстоя выходного звена перед началом рабочего хода. Выходное звено в интервале рабочего хода совершает движение по безударному синусоидальному закону.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2290296C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ИЗДЕЛИЙ УДЛИНЕННОЙ ФОРМЫ | 2001 |
|
RU2176973C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| МЕХАНИЗМ С ВЫСТОЯМИ ВЫХОДНОГО ЗВЕНА | 2002 |
|
RU2229047C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2236343C2 |
Изобретение относится к средствам механизации технологических процессов и может быть использовано при передаче изделий из позиции в позицию. Механизм с выстоем выходного звена содержит кривошип, сопряженный с выходным звеном, совершающим поступательное движение, и стойку. Выходное звено выполнено в виде стола, снабженного силовым упругим элементом и вертикально расположенной панелью с пазом для связи с кривошипом. Стол смонтирован на неподвижных направляющих, закрепленных на опорах с резьбовыми муфтами. Панель крепится к нижней поверхности стола. Центр вращения кривошипа лежит на прямой, совпадающей с нижней кромкой панели. При этом силовой упругий элемент выполнен в виде пружины растяжения, которая одним концом крепится к боковине панели, а другим - к неподвижному стержню, жестко закрепленному на поперечине неподвижных направляющих. При положении стола в начале рабочего хода пружина сжата, в положении конца рабочего хода - растянута. Направляющие снабжены упорами для фиксирования стола при его выстое перед началом рабочего хода. Технический результат заключается в упрощении конструкции и повышении точности функционирования. 8 з.п. ф-лы, 3 ил.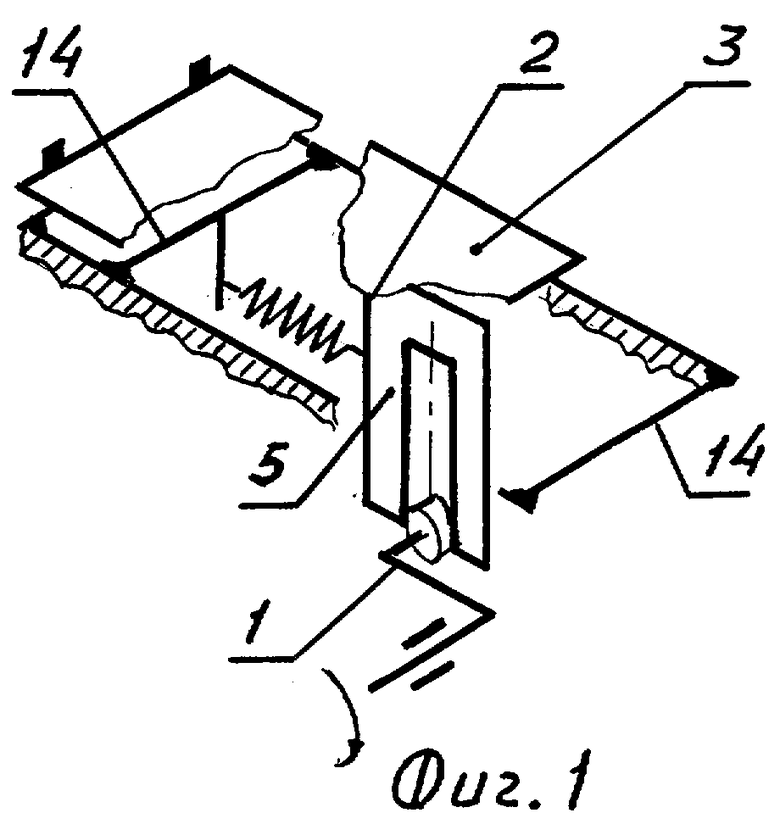
Х=r sinϕ,
v=r cosϕ,
a=-r sinϕ,
где X - перемещение стола;
r - длина кривошипа;
ϕ - угол поворота кривошипа, отсчитанный от середины интервала рабочего хода;
v - скорость стола;
а - ускорение стола.
| МЕХАНИЗМ С ВЫСТОЯМИ ВЫХОДНОГО ЗВЕНА | 2002 |
|
RU2229047C1 |
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике, т.5 | |||
| - М.: Наука, 1981, с.29 | |||
| US 4979476 А, 25.12.1990. | |||

