Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис. а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа “рука” для передачи изделий, выполненное в виде комбинированного механизма, содержащего подвижное основание, исполнительный механизм с губками для захвата изделий и механизм поворота подвижного основания, и привода (патент №2179505 (РФ), опубл. в БИПМ, 2002. - №5 - прототип). У прототипа подвижное основание и механизм поворота последнего выполняют функцию передаточного механизма.
Основным недостатком прототипа является невысокие производительность и точность функционирования. Недостаток вызван усложненностью структуры кинематической цепи, т.е. большим числом подвижных звеньев и кинематических пар. Увеличенное число подвижных звеньев лимитирует частоту повторения рабочих циклов (ухудшаются динамические характеристики) и снижает производительность устройства, а зазоры в сопряжениях звеньев не способствуют обеспечению высокой точности работы.
Задачей настоящего изобретения является повышение производительности и точности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа “рука” для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, выходное звено передаточного механизма является ведущим звеном исполнительного механизма, и привод, выходное звено передаточного механизма содержит подвижный стержень с жестко закрепленной на нем направляющей, при этом в теле направляющей выполнен криволинейный паз, а ведущее звено передаточного механизма снабжено роликом для взаимодействия с упомянутым пазом.
Ведущее звено передаточного механизма выполнено в виде кривошипа, а выходное - в виде кулисы, совершающей возвратно-поступательные движения.
Криволинейный паз в теле направляющей имеет S-образную форму, при этом он выполнен в виде двух жестко сопряженных между собой дуг, радиус каждой из которых равен длине кривошипа передаточного механизма.
Центр вращения кривошипа передаточного механизма, линия сопряжения дуг паза в направляющей и линия хода подвижного стержня лежат в одной плоскости.
Подвижный стержень выходного звена передаточного механизма смонтирован, по меньшей мере, в двух неподвижных направляющих.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, обеспечивающими упрощение конструкции, повышение производительности и точности работы при передаче изделий из позиции в позицию. Упрощение конструкции видно из того, что, в сравнении с прототипом, предлагаемое устройство удовлетворяет первому условию работоспособности при меньшем числе подвижных звеньев и кинематических пар
W=3n-2p5-р4=3·3-2·3-2=1,
где W - степень подвижности комбинированного механизма, W=1;
n - число подвижных звеньев: кривошип, кулиса, одно из выходных звеньев, n=3;
р5 - число низших кинематических пар: кривошип-стойка, стержень кулисы - неподвижная направляющая, выходное звено исполнительного механизма - подвижный стержень кулисы, p5=3;
р4 - число высших кинематических пар: кривошип - криволинейный паз кулисы, выходное звено исполнительного механизма - паз неподвижного копира, р4=2.
Повышение производительности достигается в результате безударной работы передаточного механизма, последний является синусным механизмом, реализующим синусоидальный закон движения выходного звена - кулисы. Отсутствие ударов дает возможность увеличить скорость движения звеньев, уменьшить период работочего цикла и соответственно повысить производительность устройства. Уменьшение числа подвижных звеньев и кинематических пар способствует повышению точности работы устройства путем уменьшения ошибок положения и перемещения выходных звеньев обоих механизмов.
Выполнение передаточного механизма в виде кулисного механизма с поступательным движением выходного звена (синусный механизм) обеспечивает поступательное движение выходных звеньев исполнительного механизма, шарнирно связанных с кулисой и имитирующих ее движение. Прямолинейное перемещение выходных звеньев исполнительного механизма в интервале рабочего хода является предпочтительным при передаче изделий с повышенной массой.
Наличие криволинейного паза в теле направляющей кулисы для взаимодействия ее с кривошипом обеспечивает прерывистое движение кулисы при постоянном вращении кривошипа. Выстой кулисы на границах интервалов рабочего и холостого ходов, т.е. в позициях “схват изделия” и “выдача изделия”, особенно предпочтительны при передаче массивных и габаритных изделий, поскольку подача таких изделий в губки и их выдача требуют больше времени. Криволинейная форма паза кулисы и его выполнение в виде дуг окружности, радиус которых равен длине кривошипа, обеспечивает реализацию двух преимуществ: 1) при повороте кривошипа на угол 90° от начала рабочего хода кулиса совершает полный рабочий ход, равный двум длинам кривошипа; 2) при выполнении кривошипом второй половины рабочего хода (его поворот от 90 до 180°) кулиса выстаивает. При холостом ходе характер движения кулисы и шарнирно связанных с ней выходных звеньев исполнительного механизма оказывается аналогичным, т.е. повторяется. Выстой губок на границах интервалов рабочего и холостого ходов, т.е. в позициях “схват изделия” и “выдача изделия”, повышает качество процесса передачи изделий.
Размещение центра вращения кривошипа, линии сопряжения обеих дуг паза и линии хода подвижного стержня кулисы в одной плоскости обеспечивает равенство интервалов рабочего и холостого ходов. В результате имеем передаточный механизм центрального типа, обеспечивающий одинаковое время выстоя губок в разжатом положении на обеих границах интервалов движения.
Крепление кулисы, по меньшей мере, в двух неподвижных направляющих исключает упругую деформацию ее подвижного стержня и таким образом повышает точность работы губок.
Предлагаемое устройство типа “рука” для передачи изделий поясняется чертежами.
На фиг.1 представлено устройство, кинематическая схема;
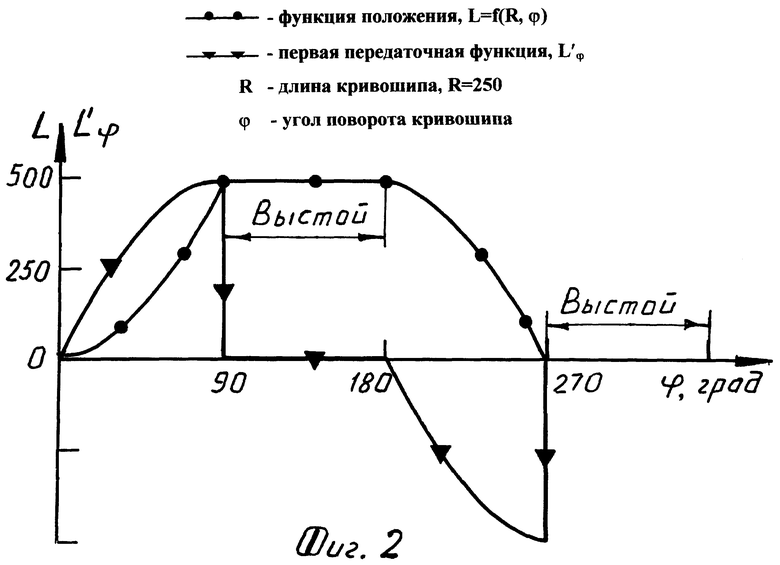
на фиг.2 - законы движения кулисы: функция положения и первая передаточная функция.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2, и исполнительный механизм 3 с губками 4 для захвата изделий, и привод 5.
Механизм 2 включает кривошип 6 и выходное звено - кулису 7, которая содержит подвижный стержень 8 и жестко связанную с ним направляющую 9 с криволинейным пазом 10, при этом кривошип 6 снабжен роликом 11 для взаимодействия с упомянутым пазом кулисы.
Механизм 3 содержит ведущее звено, функцию которого выполняет кулиса 7 передаточного механизма, выходные звенья 12 и 13, шарнирно связанные с кулисой. На выходных звеньях жестко закреплены губки 4 для захвата изделий, при этом жесткое закрепление губок выполнено разъемным для возможности быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Комбинированный механизм 1 включает неподвижный копир 14 для взаимодействия с выходными звеньями 12 и 13 исполнительного механизма, при этом в теле копира выполнены продольные фигурные пазы 15 и 16, а на свободных концах выходных звеньев смонтированы ролики 17 и 18 для взаимодействия с упомянутыми пазами.
Шарнирная связь выходных звеньев 12 и 13 с кулисой 7 содержит палец 19, жестко закрепленный на свободном конце подвижного стержня 8 кулисы. Криволинейный паз в теле направляющей 9 кулисы 7 выполнен в виде двух жестко связанных дуг 20 и 21 окружности, при этом радиус каждой дуги равен длине кривошипа 6, а центры кривизны дуг лежат на линии хода подвижного стержня 8 по разные стороны относительно центра вращения кривошипа 6. В крайнем положении кулисы 7 центр кривизны одной из дуг удален от центра вращения кривошипа на расстояние, равное двум радиусам (длинам) последнего, при этом центр кривизны другой дуги совпадает с центром вращения кривошипа. При нахождении кулисы на другой границе интервалов рабочего и холостого ходов положения центров кривизны дуг меняется на обратное.
Кривошип 6 передаточного механизма 2 жестко закреплен на валу 22 привода 5. Дуги S-образного паза 10 в теле направляющей 9 жестко сопряжены между собой по линии 23, совпадающей с линией хода подвижного стержня 8 кулисы. Для уменьшения упругой деформации подвижного стержня 8 он смонтирован, по меньшей мере, в двух неподвижных направляющих 24.
Форма губок 4 соответствует форме передаваемых изделий. При захвате и переносе изделия обеспечивается жесткое сопряжение губок с изделием по большей части периметра последнего.
Устройство типа “рука” для передачи изделий работает следующим образом.
При работе привода 5 кривошип 6 совершает вращательное движение, которое посредством ролика 11, взаимодействующего с криволинейным пазом 10, преобразуется в возвратно-поступательное движение кулисы 7. Движение кулисы трансформируется в движение звеньев исполнительного механизма 3. При возвратно-поступательном движении кулисы выходные звенья 12 и 13 будут совершать сложное движение: поступательное движение вместе с подвижным стержнем 8 и, в зависимости от текущего взаимодействия роликов 17 и 18 с фигурными пазами 15 и 16 неподвижного копира 14, поворотное движение с выстоями относительно упомянутого стержня.
В позициях “схват” изделия или выдача изделия криволинейный паз 10 занимает соответствующее крайнее положение, при этом ролик 11 кривошипа 6 находится на линии сопряжения дуг кривых паза. При повороте кривошипа на 90° от его начального положения кулиса 7 проходит путь, равный двум длинам кривошипа, и оказывается в другом крайнем положении. Вместе с кулисой такой же путь проходят выходные звенья исполнительного механизма. В интервале поворота кривошипа от 90 до 180° кулиса и связанные с ней выходные звенья 12 и 13 выстаивают. При обратном ходе кулиса будет совершать аналогичное движение: при повороте кривошипа от 180 до 270° она проходит путь, равный двум длинам кривошипа, и возвращается в исходное (начальное) положение, а при повороте кривошипа от 270 до 360° - выстаивает.
Перед позициями выстаивания кулисы и выходных звеньев, т.е. перед поворотом кривошипа от 90 до 180° и от 270 до 360°, губки для захвата изделий приводятся в разжатое положение. Этим обеспечивается возможность для увеличения времени на выполнение операций “схват” изделия и выдача изделия. При передаче изделий со значительными массой и габаритами увеличение времени на выполнение таких операций без увеличения периода рабочего цикла является предпочтительным. Разжатие губок 4 перед выстоем выходных звеньев 12 и 13 обеспечивается в результате взаимодействия их роликов 17 и 18 с фигурными пазами 15 и 16 неподвижного копира 14.
Выполнение передаточного механизма в виде синусного механизма с S-образным профилем паза в теле направляющей кулисы для взаимодействия последней с роликом кривошипа обеспечивает выстой выходных звеньев исполнительного механизма на границах интервалов движения при разжатом положении губок, упрощает конструкцию, повышает точность работы, способствует повышению производительности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2245780C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым при обслуживании машин, станков, прессов и другого оборудования. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод. Выходное звено передаточного механизма является ведущим звеном исполнительного механизма и содержит подвижный стержень с жестко закрепленной на нем направляющей. При этом в теле направляющей выполнен криволинейный паз, а ведущее звено передаточного механизма снабжено роликом для взаимодействия с упомянутым пазом. Ведущее звено передаточного механизма выполнено в виде кривошипа, а выходное - в виде кулисы, совершающей возвратно-поступательные движения. Криволинейный паз в теле направляющей имеет S-образную форму, при этом он выполнен в виде двух жестко сопряженных между собой дуг, радиус каждой из которых равен длине кривошипа передаточного механизма. Центр вращения кривошипа передаточного механизма, линия сопряжения дуг паза в направляющей и линия хода подвижного стержня лежат в одной плоскости. Подвижный стержень выходного звена передаточного механизма смонтирован, по меньшей мере, в двух неподвижных направляющих. Изобретение позволит повысить производительность и точность работы устройства. 4 з.п. ф-лы, 2 ил.

| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

