Изобретение относится к области приборостроения, а именно к системам навигации с гиростабилизированными инерциальными платформами.
Известен способ повышения виброустойчивости инерциальной платформы [1], заключающийся в том, что осуществляют амортизацию инерциальной платформы.
Наиболее близким по технической сущности является способ повышения виброустойчивости инерциальной платформы [2] с акселерометрами с расположенными соответственно по осям курса, крена и тангажа их измерительными осями и с гироскопами с измерительными осями по этим же осям, установленными в трехосном кардановом подвесе, который в свою очередь установлен на дополнительной следящей раме крена с установкой подшипников опоры последней в корпусе посредством расположенных по ее оси и симметрично относительно оси тангажа двух кольцевых амортизаторов, плоскости симметрии профильных кольцевых диафрагм которых перпендикулярны оси крена, заключающийся в том, что задают синусоидальные вибрационные воздействия в полосе частот пропускания инерциальной платформы, определяют частоты резонанса элементов конструкции инерциальной платформы, производят динамическую балансировку.
Недостатком такого способа является сложность достижения требуемого эффекта и малая информативность в части того, каким образом производить динамическую балансировку при недостаточной эффективности указанного способа.
Техническим результатом изобретения является повышение точности инерциальной платформы.
Данный технический результат достигается способом повышения виброустойчивости инерциальной платформы с акселерометрами с расположенными соответственно по осям курса, крена и тангажа их измерительными осями и с гироскопами с измерительными осями по этим же осям, установленными в трехосном кардановом подвесе, который в свою очередь установлен на дополнительной следящей раме крена с установкой подшипников опоры последней в корпусе посредством расположенных по ее оси и симметрично относительно оси тангажа двух кольцевых амортизаторов, плоскости симметрии профильных кольцевых диафрагм которых перпендикулярны оси крена, заключающийся в том, что задают синусоидальные вибрационные воздействия в полосе частот пропускания инерциальной платформы, определяют частоты резонанса элементов конструкции инерциальной платформы, производят динамическую балансировку, тем, что задают синусоидальное вибрационное воздействие на частоте резонанса системы амортизации по оси крена, направляют выходной сигнал акселерометра, измерительная ось которого направлена по оси крена, на вход опорного напряжения фазового демодулятора, выходной сигнал датчика положения по измерительной оси гироскопа, расположенного по оси курса, усиливают, демодулируют с частотой опорного напряжения питания переменного тока датчика положения и направляют на сигнальный вход фазового демодулятора, выходное напряжение которого пропускают через фильтр низких частот, измеряют величину и определяют полярность выходного напряжения фильтра низких частот, при динамической балансировке на внутреннем кольце каждого из двух амортизаторов, жестко связанного с внешним кольцом подшипника опоры дополнительной следящей рамы крена, устанавливают по одному грузу, выполняя грузы с одинаковой массой при симметричном положении относительно оси тангажа в плоскости, в которой расположены оси крена и тангажа; задают синусоидальное вибрационное воздействие на частоте резонанса системы амортизации по оси тангажа, направляют выходной сигнал акселерометра, измерительная ось которого направлена по оси тангажа, на вход опорного напряжения фазового демодулятора, выходной сигнал датчика положения по измерительной оси гироскопа, расположенной по оси курса, усиливают, демодулируют с частотой опорного напряжения питания переменного тока датчика положения и направляют на сигнальный вход фазового демодулятора, выходное напряжение которого пропускают через фильтр низких частот, измеряют величину и определяют полярность выходного напряжения фильтра низких частот, при динамической балансировке на внутреннем кольце одного из двух амортизаторов устанавливают два груза одинаковой массы, располагая их в плоскости расположения осей крена и курса симметрично относительно оси крена; массы грузов выполняют такими, чтобы обеспечить равенство нулю выходного сигнала фильтра низких частот, расположение грузов относительно начала координат осей крена и тангажа определяют исходя из знака выходного напряжения фильтра низких частот.
Посредством задания синусоидального вибрационного воздействия на частоте резонанса амортизаторов по оси крена, подачи на вход опорного напряжения фазового демодулятора выходного сигнала акселерометра, измерительная ось которого направлена по оси крена, усиления и демодуляции выходного сигнала датчика положения по измерительной оси гироскопа, расположенного по оси курса, подачи демодулированиого сигнала датчика положения на сигнальный вход фазового демодулятора, фильтрации его выходного напряжения, установки равномассовых грузов на внутреннем кольце каждого из амортизаторов устраняются угловые колебания инерциальной платформы относительно оси курса, вызванные линейными вибрационными воздействиями в направлении оси крена. В результате повышается точность инерциальной платформы вследствие устранения измеряемого акселерометром по оси тангажа ускорения Кориолиса, вызванного одновременным наличием линейных вибраций по оси крена и угловых колебаний инерциальной платформы относительно оси курса. Аналогичным образом посредством задания синусоидального вибрационного воздействия на частоте резонанса амортизаторов по оси тангажа, преобразования выходного напряжения акселерометра, измерительная ось которого направлена по оси тангажа, и выходного сигнала датчика положения гироскопа, измерительная ось которого расположена по оси курса, установки равномассовых грузов на внутреннем кольце одного из амортизаторов устраняются угловые колебания инерциальной платформы от линейных вибраций по оси тангажа. Поэтому повышается точность инерциальной платформы вследствие устранения измеряемого акселерометром по оси крена ускорения Кориолиса, вызванного одновременным наличием линейных вибраций по оси тангажа и угловых колебаний инерциальной платформы относительно оси курса.
На фиг.1 представлено схематическое изображение инерциальной платформы, на фиг.2, 3 - схемы преобразования сигналов акселерометров и гироскопа, на фиг.4, 5 - виды размещения грузов для динамической балансировки.
В инерциальной платформе (фиг.1) на основании 1 установлен первый акселерометр 2 с измерительной осью 3 по направлению оси крена X, второй акселерометр 4 с измерительной осью 5 по оси тангажа Z, третий акселерометр 6 с измерительной осью 7 по оси курса Y, первый гироскоп 8 с первым датчиком углового положения 9 по первой измерительной оси 10, второй гироскоп 11 с первым датчиком углового положения 12 по первой измерительной оси 13 и вторым датчиком углового положения 14 по второй измерительной оси 15. Вектор H1 кинетического момента первого гироскопа 8 направлен по оси крена X. Второй датчик углового положения первого гироскопа 8 не показан, так как он не используется при формировании сигналов для динамической балансировки инерциальной платформы. Вектор Н2 кинетического момента второго гироскопа 11 направлен по оси курса Y. Основание 1 со степенью свободы углового перемещения относительно оси курса Y установлено в раму внутреннего крена 16 со степенью свободы углового перемещения относительно оси крена X, которая в свою очередь со степенью свободы углового перемещения относительно оси тангажа Z установлена в тангажную раму 17. Рама внутреннего крена 16 и тангажная рама 17 образуют трехосный карданный подвес основания 1 с акселерометрами 2, 4, 6 и гироскопами 8, 11. Тангажная рама 17 установлена в дополнительной следящей раме крена 18 со степенью свободы углового перемещения относительно оси крена X. На подшипники опоры 19', 19" дополнительной следящей рамы крена 18 установлены первый кольцевой амортизатор 20' и второй кольцевой амортизатор 20" соответственно, которые прикреплены к корпусу инерциальной платформы.
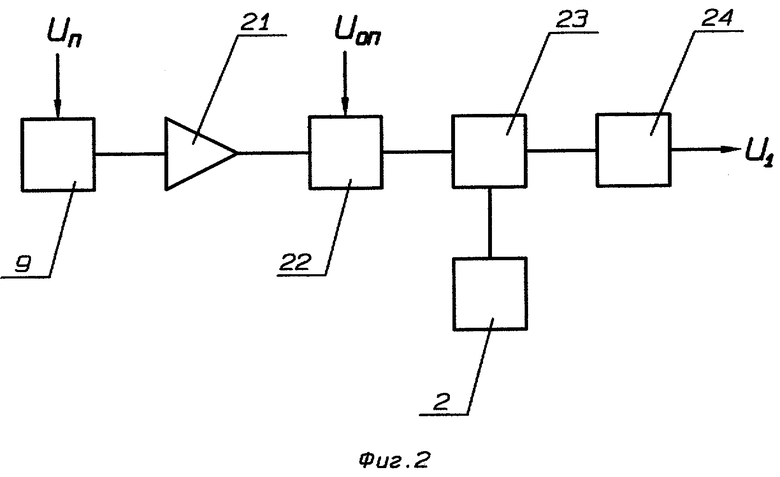
В схеме преобразования сигналов (фиг.2) при задании синусоидальной линейной вибрации по оси крена Х выход первого датчика положения 9 первого гироскопа 8 подсоединен к входу усилителя 21, выход которого подключен к сигнальному входу демодулятора 22. Выход демодулятора 22 подключен к сигнальному входу другого фазового демодулятора 23, к входу опорного напряжения которого подключен выход первого акселерометра 2. К входу фильтра низких частот 24 подсоединен выход фазового демодулятора 23. Напряжения питания UП переменного тока датчика положения 9 и опорное напряжение UОП демодулятора 22 выполнены синфазными с одной и той же частотой f1 переменного тока.
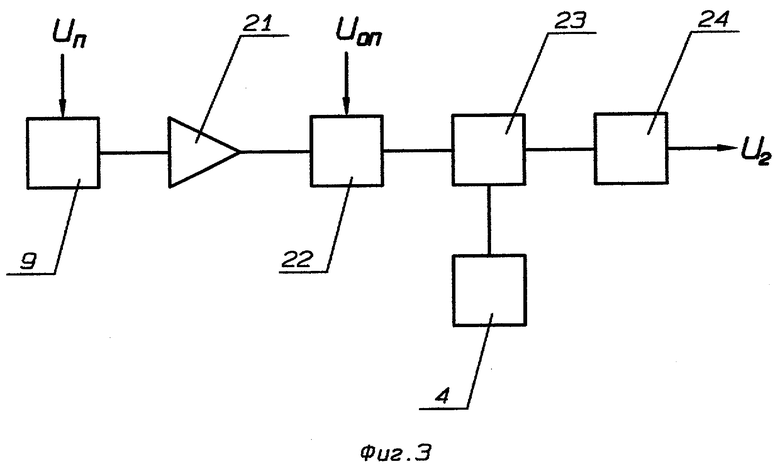
В схеме преобразования сигналов (фиг.3) при задании синусоидальной линейной вибрации по оси тангажа Z выход первого датчика положения 9 первого гироскопа 8 подсоединен к входу усилителя 21, выход которого подключен к сигнальному входу демодулятора 22. Выход демодулятора 22 подключен к сигнальному входу фазового демодулятора 23, к входу опорного напряжения которого подключен выход второго акселерометра 4. К выходу фазового демодулятора 23 подключен фильтр низких частот 24.
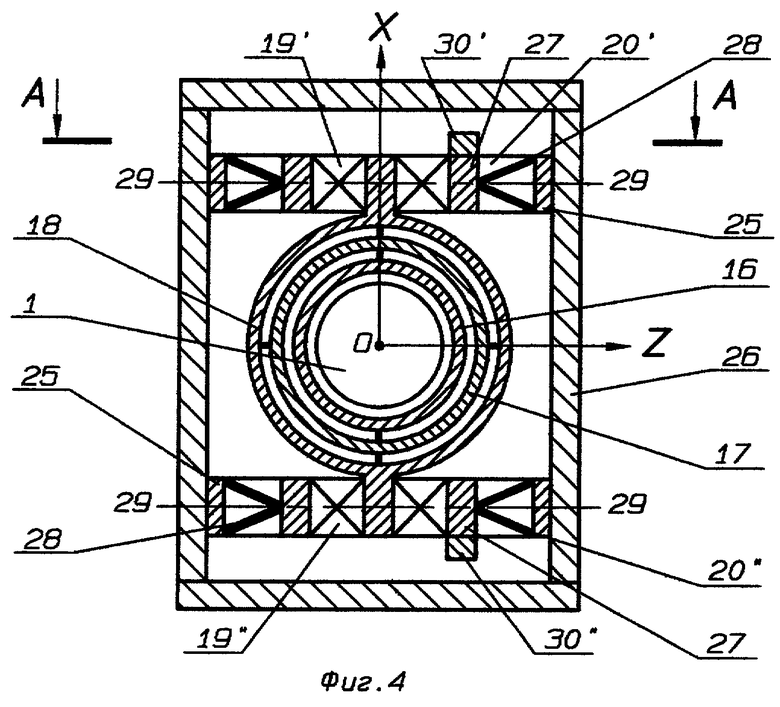
В схематическом разрезе (фиг.4) по плоскости, в которой расположены ось крена Х и ось тангажа Z, внешнее кольцо 25 первого амортизатора 20' прикреплено к корпусу 26 инерциальной платформы, а внутреннее кольцо 27 первого амортизатора 20' жестко связано с внешним кольцом подшипника опоры 19' следящей рамы 18. Между внешним кольцом 25 и внутренним кольцом 27 первого амортизатора 20' расположена профильная кольцевая диафрагма 28, имеющая профиль V-образного вида в любом из радиальных сечений. Выполненный таким образом амортизатор назван кольцевым. Аналогичным образом выполнен второй амортизатор 20", расположенный симметрично с первым амортизатором 20' относительно оси тангажа Z. Первый амортизатор 20' и второй амортизатор 20" установлены так, что плоскости симметрии 29-29 профильных кольцевых диафрагм 28 перпендикулярны оси крена X.
На внутреннем кольце 27 первого амортизатора 20' установлен груз 30', на внутреннем кольце 27 второго амортизатора 20" установлен груз 30". Грузы 30', 30" имеют одинаковую массу и расположены симметрично относительно оси тангажа Z в плоскости, образованной осью крена Х и осью тангажа Z.
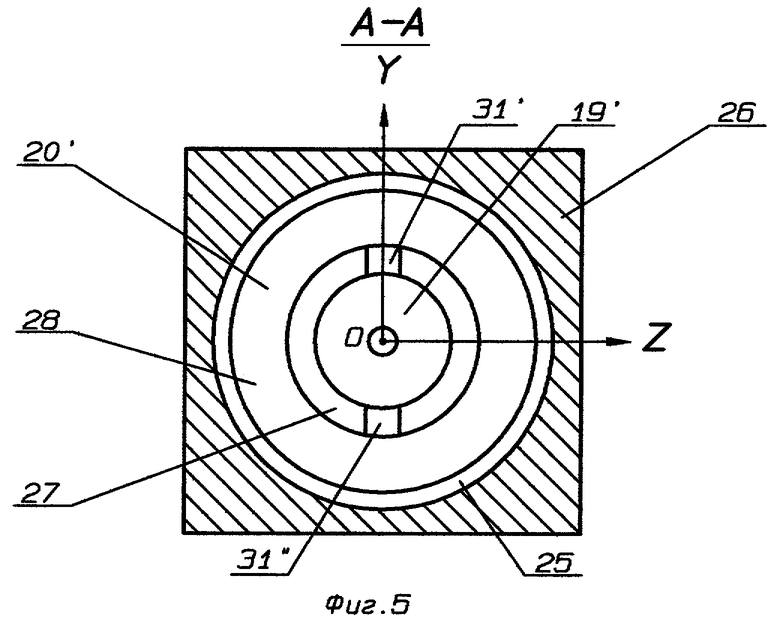
На внутреннем кольце 27 (фиг.5) первого амортизатора 20' установлены грузы 31', 31", имеющие равные массы и расположенные симметрично относительно оси крена Х в плоскости, образованной осью крена Х и осью курса Y.
При наличии или задании синусоидального воздействия с частотой резонанса амортизации f2 вдоль оси крена Х вследствие наибольшей реакции конструкции инерциальной платформы на этой частоте возникают угловые колебания основания 1 относительно оси курса Y. Одновременное наличие линейных и угловых гармонических колебаний основания 1 вызывает появление ускорений Кориолиса в направлении, перпендикулярном плоскости XY, то есть в направлении оси тангажа Z, которые измеряются вторым акселерометром 4, внося соответствующие погрешности инерциальных измерений по оси Z.
Для устранения угловых колебаний относительно оси курса Y при данном способе повышения виброустойчивости инерциальной платформы выходной сигнал первого датчика положения 9 первого гироскопа 8 усиливается в усилителе 21, преобразуется в демодуляторе 22 из переменного напряжения частотой f1 в напряжение частотой f2 и подается на сигнальный вход фазового демодулятора 23 (фиг.2). Одновременно на вход опорного напряжения фазового демодулятора 23 подается напряжение не ременного тока с частотой f2 с выхода первого акселерометра 2. Преобразованное в фазовом демодуляторе 23 напряжение с его выхода подается на вход фильтра низких частот 24. В результате на выходе фильтра низких частот 24 получается напряжение постоянного тока U1. Для динамической балансировки инерциальной платформы на внутреннее кольцо 27 первого амортизатора 20' (фиг.4) устанавливается груз 30', на внутреннее кольцо 27 второго амортизатора 20" груз 30". Если полярность выходного напряжения U1 фильтра низких частот 24 положительна, грузы 30', 30" располагаются на возможно большем удалении от оси крена Х в сторону положительного направления оси тангажа Z от начала координат О в плоскости осей крена Х и тангажа Z. При отрицательной полярности выходного напряжения U1 фильтра низких частот 24 грузы 30', 30" устанавливаются на внутренние кольца 27 первого амортизатора 20' и второго амортизатора 20" в сторону отрицательного направления оси тангажа Z. Масса одинаковых грузов 30', 30" выбирается такой величины, при которой выходное напряжение U1 фильтра низких частот 24 становится равным нулю.
В случае наличия или задания синусоидального воздействия с частотой резонанса амортизации f3 вдоль оси тангажа Z вследствие наибольшей реакции конструкции инерциальной платформы на этой частоте возникают угловые колебания основания 1 относительно оси курса Y. Одновременное наличие линейных и угловых гармонических колебаний основания 1 вызывает появление ускорений Кориолнса в направлении, перпендикулярном плоскости ZY, то есть в направлении оси крена X, которые измеряются первым акселерометром 2, внося соответствующие погрешности инерциальных измерений по оси X. При подаче с выхода демодулятора 22 (фиг.3) на сигнальный вход фазового демодулятора 23 усиленного и преобразованного в напряжение переменного тока с частотой f3 выходного сигнала первого датчика положения 9 первого гироскопа 8, на вход опорного напряжения фазового демодулятора 23 выходного напряжения с частотой f3 второго акселерометра 4, после прохождения выходного напряжения фазового демодулятора 23 через фильтр низких частот 24 на его выходе получается напряжение постоянного тока U2. В этом случае при положительной полярности напряжения постоянного тока U2 для динамической балансировки грузы 31', 31" устанавливаются на внутреннее кольцо 27 первого амортизатора 20' в плоскости XY (фиг.5). Если полярность напряжения постоянного тока U2 отрицательна, то грузы 31', 31" устанавливаются на внутреннее кольцо 27 второго амортизатора 20" в плоскости XY. Массы грузов 31', 31" выбираются таких величин, при установке которых выходное напряжение U2 фильтра низких частот становится равным нулю.
При устранении угловых колебаний инерциальной платформы относительно оси курса Y достигается исключение наибольших из составляющих ускорений Кориолиса по осям крена Х и тангажа Z при воздействии вибрационных ускорений на инерциальную платформу. Таким образом достигается повышение виброустойчивости инерциальной платформы.
Источники информации
1. Индикаторные гироскопические платформы. Под ред. А.Д.Александрова. - М.: Машиностроение, 1979, с.170-176.
2. Индикаторные гироскопические платформы. Под ред. А.Д.Александрова. - М.: Машиностроение, 1979, с.232-234.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2006 |
|
RU2329467C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
Изобретение относится к области приборостроения, а именно к системам навигации с гиростабилизированными инерциальными платформами. Способ заключается в том, что задают синусоидальные вибрационные воздействия в полосе частот пропускания инерциальной платформы, определяют частоты резонанса, производят динамическую балансировку, при этом синусоидальные вибрационные воздействия задают попеременно по осям крена и тангажа инерциальной платформы на частотах резонанса системы амортизации. Преобразуют выходной сигнал датчика положения гироскопа по оси курса и демодулируют его с опорной частотой выходного напряжения акселерометра, по измерительной оси которого направлено вибрационное воздействие. Далее этот сигнал фильтруют и по его величине и полярности производят динамическую балансировку, устанавливая грузы одинаковой массы симметрично относительно соответствующих осей на внутренние кольца амортизаторов таким образом, чтобы напряжение с выхода фильтра низких частот стало равным нулю. Техническим результатом изобретения является повышение точности инерциальной платформы. 5 ил.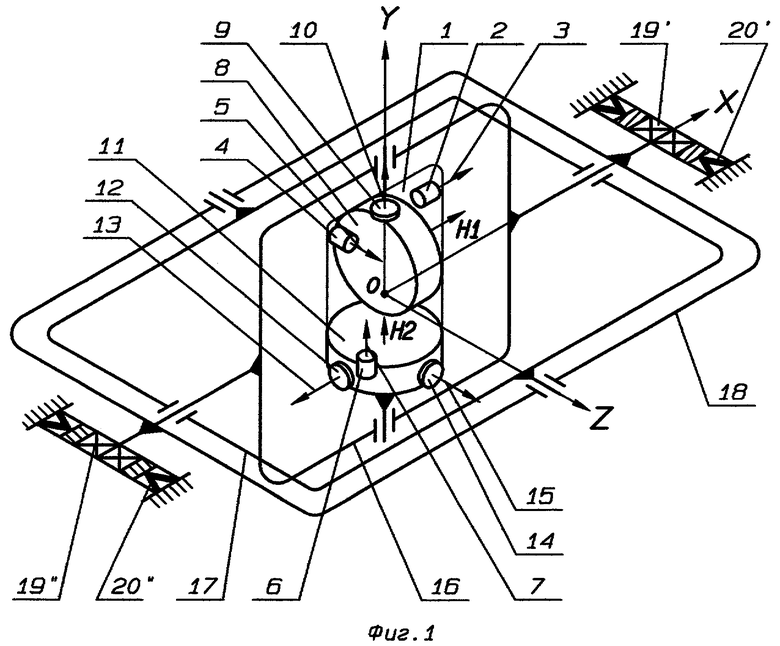
Способ повышения виброустойчивости инерциальной платформы с акселерометрами с расположенными соответственно по осям курса, крена и тангажа их измерительными осями и с гироскопами с измерительными осями по этим же осям, установленными в трехосном кардановом подвесе, который, в свою очередь, установлен на дополнительной следящей раме крена с установкой подшипников опоры последней в корпусе посредством расположенных по ее оси и симметрично относительно оси тангажа двух кольцевых амортизаторов, плоскости симметрии профильных кольцевых диафрагм которых перпендикулярны оси крена, заключающийся в том, что задают синусоидальные вибрационные воздействия в полосе частот пропускания инерциальной платформы, определяют частоты резонанса элементов конструкции инерциальной платформы, производят динамическую балансировку, отличающийся тем, что задают синусоидальное вибрационное воздействие на частоте резонанса системы амортизации по оси крена, направляют выходной сигнал акселерометра, измерительная ось которого направлена по оси крена, на вход опорного напряжения фазового демодулятора, выходной сигнал датчика положения по измерительной оси гироскопа, расположенной по оси курса, усиливают, демодулируют с частотой опорного напряжения питания переменного тока датчика положения и направляют на сигнальный вход фазового демодулятора, выходное напряжение которого пропускают через фильтр низких частот, измеряют величину и определяют полярность выходного сигнала фильтра низких частот, при динамической балансировке на внутреннем кольце каждого из двух амортизаторов, жестко связанного с внешним кольцом подшипника опоры дополнительной следящей рамы крена, устанавливают по одному грузу, выполняя грузы с одинаковой массой при симметричном положении относительно оси тангажа в плоскости, в которой расположены оси крена и тангажа; задают синусоидальное вибрационное воздействие на частоте резонанса системы амортизации по оси тангажа, направляют выходной сигнал акселерометра, измерительная ось которого направлена по оси тангажа, на вход опорного напряжения фазового демодулятора, выходной сигнал датчика положения по измерительной оси гироскопа, расположенной по оси курса, усиливают, демодулируют с частотой опорного напряжения питания переменного тока датчика положения и направляют на сигнальный вход фазового демодулятора, выходное напряжение которого пропускают через фильтр низких частот, измеряют величину и определяют полярность выходного сигнала фильтра низких частот, при динамической балансировке на внутреннем кольце одного из амортизаторов устанавливают два груза одинаковой массы, располагая их в плоскости расположения осей крена и курса симметрично относительно оси крена, массы грузов выполняются такими, чтобы обеспечить равенство нулю выходного сигнала фильтра низких частот, расположение грузов относительно начала координат осей крена и тангажа определяют, исходя из знака выходного напряжения фильтра низких частот.
| Индикаторные гироскопические платформы./Под ред | |||
| А.Д.Александрова | |||
| - М.: Машиностроение, 1979, с.170-176, 232-234 | |||
| GB 1394663 А, 21.05.1975 | |||
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 1993 |
|
RU2062990C1 |
| US 4292854 А, 06.10.1981 | |||
| Устройство для сопряжения источника и приемника информации | 1985 |
|
SU1278864A1 |

