Изобретение относится к области приборостроения, а именно к системам навигации с гиростабилизированными инерциальными платформами.
Известна инерпиальная платформа [1], содержащая акселерометры, гироскопы, установленные на платформе, заключенной при помощи рамок в карданный подвес, системы стабилизации и коррекции с усилителями стабилизации и коррекции, стабилизирующими датчиками момента или двигателями на осях платформы и рамок карданного подвеса.
Наиболее близкой по технической сущности является инерциальная платформа [2], содержащая основание с расположенными на нем первым, вторым и третьим акселерометрами с направлением их измерительных осей соответственно по осям крена X, тангажа Z и курса Y, гироскопами с первым датчиком угла по оси крена, вторым датчиком угла по оси тангажа и третьим датчиком угла по оси курса; карданный подвес основания, представляющий собой, например, раму курса с рамами внутреннего крена и тангажа, установленными в раме внешнего крена, которая установлена в корпусе на амортизаторах, датчик момента на каждой из осей рам курса, внутреннего крена, тангажа и внешнего крена, следящие системы стабилизации рам курса, внутреннего крена и тангажа, каждая из которых содержит датчик угла гироскопа по соответствующей оси, усилитель переменного тока, демодулятор, усилитель постоянного тока и датчик момента на оси соответствующей рамы, следящую систему стабилизации рамы внешнего крена, содержащую датчик положения на оси рамы внутреннего крена, усилитель переменного тока, демодулятор, усилитель постоянного тока и датчик момента на оси рамы внешнего крена, причем на оси каждой рамы установлены подшипники.
Недостатком такой инерциальной платформы являются погрешности измерения, вызываемые ускорениями Кориолиса в направлениях измерительных осей акселерометров вследствие эффектов выпрямления соответствующих синфазных составляющих сигналов угловых и линейных перемещений основания, особенно с собственной частотой системы амортизации в условиях вибрационных воздействий по осям крена, тангажа и курса.
Техническим результатом изобретения является повышение виброустойчивости и точности инерциальной платформы.
Данный технический результат достигается в инерциальной платформе, содержащей основание с расположенными на нем первым, вторым и третьим акселерометрами с направлением их измерительных осей соответственно по осям крена X, тангажа Z и курса Y, гироскопами с первым датчиком угла по оси крена, вторым датчиком угла по оси тангажа и третьим датчиком угла по оси курса; карданный подвес основания, представляющий собой, например, раму курса с рамами внутреннего крена и тангажа, установленными в раме внешнего крена, которая установлена в корпусе на амортизаторах, датчик момента на каждой из осей рам курса, внутреннего крена, тангажа и внешнего крена, следящие системы стабилизации рам курса, внутреннего крена и тангажа, каждая из которых содержит датчик угла гироскопа по соответствующей оси, усилитель переменного тока, демодулятор, усилитель постоянного тока и датчик момента на оси соответствующей рамы, следящую систему стабилизации рамы внешнего крена, содержащую датчик положения на оси рамы внутреннего крена, усилитель переменного тока, демодулятор, усилитель постоянного тока, датчик момента на оси рамы внешнего крена, причем на оси каждой рамы установлены подшипники, тем, что каждый амортизатор содержит имеющие кольцевую форму внешнюю и внутреннюю обоймы, между которыми расположена кольцевая диафрагма, имеющая V-образную форму профиля в любом из радиальных сечений амортизатора, рама внешнего крена установлена на двух амортизаторах, внутренняя обойма каждого из которых прикреплена к внешнему кольцу одного из подшипников на оси рамы внешнего крена, а внешняя обойма - к корпусу, амортизаторы расположены по отношению друг к другу симметрично относительно плоскости Y-Z; на раме внутреннего крена в плоскости Y-Z симметрично относительно оси Z по одну из сторон от плоскости X-Y расположены два первых груза массой m1 каждый, на раме тангажа в плоскости X-Z симметрично относительно оси Х по одну из сторон от плоскости Y-Z установлены два вторых груза массой m2 каждый, параллельно плоскости X-Z на одной из сторон рамы внутреннего крена установлен третий груз массой m3, равномерно распределенный относительно оси Y, на раме тангажа в плоскости X-Y параллельно плоскости X-Z и симметрично относительно оси Y установлены два четвертых груза массой m4 каждый, на внутренней обойме одного из амортизаторов в плоскости X-Y симметрично относительно оси Х установлены два пятых груза массой m5 каждый, на внутренних обоймах обоих амортизаторов в плоскости X-Z симметрично относительно оси Z по одну из сторон от плоскости X-Y установлены два шестых груза массой m6 каждый; суммарная масса первых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы внутреннего крена с первым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение третьего акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Y линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы внутреннего крена, положение первых грузов относительно плоскости X-Y выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса вторых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы тангажа с вторым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение третьего акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Y линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы тангажа, положение вторых грузов относительно плоскости Y-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; масса третьего груза выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы внутреннего крена с первым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение второго акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Z линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы внутреннего крена, положение третьего груза относительно плоскости X-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса пятых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы курса с третьим датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение второго акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Z линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы курса, положение пятых грузов относительно плоскости Y-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса четвертых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы тангажа с вторым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение первого акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Х линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы тангажа, положение четвертых грузов относительно плоскости X-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса шестых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы курса с третьим датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение первого акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Х линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы курса, положение шестых грузов относительно плоскости X-Y выполнено исходя из полярности вышеуказанного напряжения постоянного тока.
Путем выполнения амортизаторов с кольцевой формой внешней и внутренней обойм с расположением между ними кольцевой диафрагмы V-образного профиля, установкой рамы внешнего крена на двух амортизаторах так, что внутренняя обойма каждого из амортизаторов расположена на внешнем кольце одного из подшипников на оси рамы внешнего крена с пространственным расположением амортизаторов симметрично относительно осей карданного подвеса, происходит демпфирование вибрационных воздействий по каждой из осей и достигается повышение виброустойчивости инерциальной платформы.
Посредством установки первых и третьего грузов на раме внутреннего крена, вторых и четвертых грузов на раме тангажа, пятых и шестых грузов на внутренних обоймах амортизаторов, выполнения грузов из условия равенства нулю напряжения постоянного тока на выходе фазового демодулятора, последовательно преобразующего выходные сигналы первого, второго и третьего датчиков угла гироскопов, достигается устранение ускорений Кориолиса по осям крена, тангажа и курса вследствие устранения угловых колебаний относительно этих осей при воздействии линейных вибрационных ускорений. Тем самым обеспечивается измерение акселерометрами только инерционных ускорений, что повышает точность инерциальной платформы.
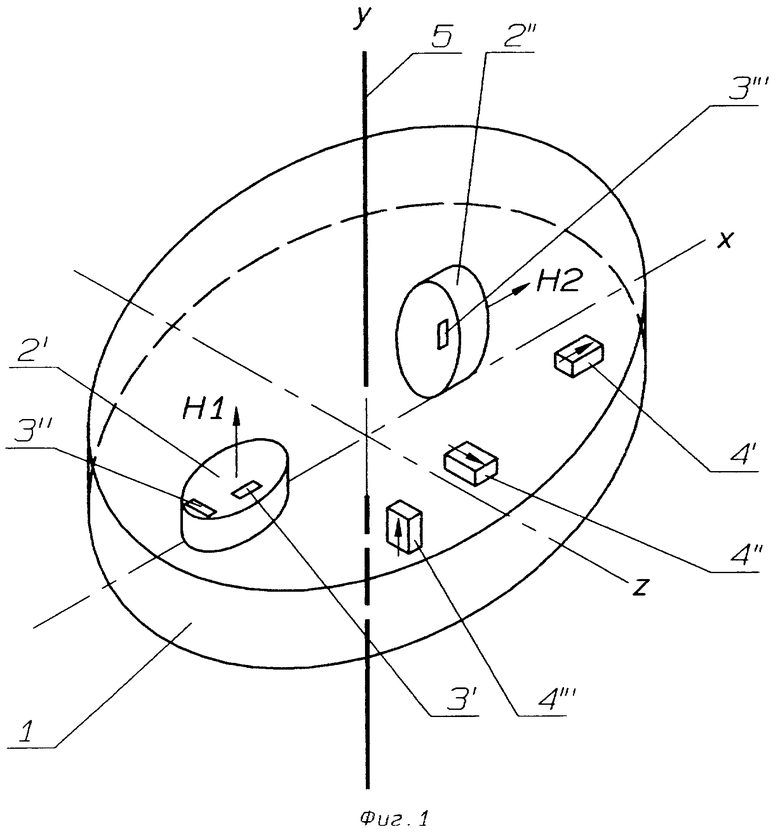
На фиг.1 представлен вид основания, на фиг.2 - конструктивная схема инерциальной платформы, на фиг.3 - вид амортизатора, на фиг.4, 5, 6, 7 - блок-схемы следящих систем стабилизации инерциальной платформы, на фиг.8 - блок-схема коммутации сигналов инерциальной платформы.
На основании 1 (фиг.1) установлены первый гироскоп 2I с первым датчиком угла 3I по оси крена Х и вторым датчиком угла 3II по оси тангажа Z, второй гироскоп 2II с третьим датчиком угла 3III по оси курса Y, первый акселерометр 4I с направлением измерительной оси по оси X, второй акселерометр 4II с направлением измерительной оси по оси Z, третий акселерометр 4III с направлением измерительной оси по оси Y. Вектор кинетического момента H1 первого гироскопа 2I направлен по оси Y, вектор кинетического момента Н2 второго гироскопа 2II направлен по оси X. В качестве первого 2I и второго 2II гироскопов могут быть использованы динамически настраиваемые гироскопы.
Основание 1 (фиг.2) с осью 5, на которой расположены датчик момента 6 и подшипники 7I и 7II, образует раму курса, которая обеспечивает относительно оси Y одну из трех степеней свободы углового перемещения и установлена в раму внутреннего крена 8. Рама внутреннего крена 8 на оси 9 с датчиком момента 10 на подшипниках 11I, 11II обеспечивает вторую, ортогональную первой, степень свободы основания 1 относительно оси Х и установлена в раме тангажа 12, которая, в свою очередь, своей осью 13 с датчиком момента 14 на подшипниках 15I, 15II установлена в раме внешнего крена 16. На оси 9 рамы внутреннего крена 8 также установлен датчик положения 17 для обеспечения ортогональности осей Y и Z. По трем другим осям для выдачи информации об углах поворота объекта относительно инерциальной платформы установлены датчики положения в виде синусно-косинусных вращающихся трансформаторов, которые не показаны на фиг.2 в связи с тем, что к объяснению заявленных признаков они отношения не имеют. На оси 18 рамы внешнего крена 16 установлены датчик момента 19 и подшипники 20I, 20II. На внешнем кольце подшипника 20I расположена внутренняя обойма 21 первого амортизатора 22I, внешняя обойма 23 которого закреплена в корпусе инерциальной платформы. На внешнем кольце подшипника 20II установлена внутренняя обойма 21 второго амортизатора 22II, а его внешняя обойма 23 закреплена в корпусе.
На раме внутреннего крена 8 в плоскости Y-Z симметрично относительно оси Z по одну из сторон от плоскости X-Y установлены первые грузы 24I, 24II массой m1 каждый.
На раме тангажа 12 в плоскости X-Z симметрично относительно оси Х по одну из сторон от плоскости Y-Z установлены вторые грузы 25I, 25II массой m2 каждый.
На одной из сторон рамы внутреннего крена 8 на поверхности 26 параллельно плоскости X-Z установлен третий груз 27 массой m3, который в виде кольца или из нескольких секторов равномерно распределен относительно оси Y. На раме тангажа 12 в плоскости X-Y параллельно плоскости X-Z и симметрично относительно оси Y по одну из сторон от плоскости X-Z установлены четвертые грузы 28I, 28II массой m4 каждый.
На внутренней обойме 21, например, первого амортизатора 22I в плоскости X-Y симметрично относительно оси Х установлены пятые грузы 29I,29II массой m5 каждый.
На внутренних обоймах 21 первого 22I и второго 22II амортизаторов в плоскости X-Z симметрично относительно оси Z по одну из сторон от плоскости X-Y расположены шестые грузы 30I, 30II массой m6 каждый.
Первый амортизатор 22I (фиг.3) имеет внутреннюю обойму 21, внешнюю обойму 23 и расположенную между ними диафрагму 31 из эластичного материала, например резины. Внутренняя обойма 21, внешняя обойма 23 и диафрагма 31 имеют кольцевую форму в виде со стороны торца 32. Причем диафрагма 31 в любом из радиальных сечений имеет V-образную форму образующей кольца для обеспечения парой амортизаторов одинаковой жесткости в направлениях трех ортогональных осей X, Y, Z инерциальной платформы. Второй амортизатор 22II аналогичен первому амортизатору 22I, выполненному симметрично относительно плоскостей 33-33 и 34-34.
В следящей системе стабилизации рамы курса (фиг.4) третий датчик угла 3III второго гироскопа 2II подключен к усилителю переменного тока 35I, выход которого соединен с входом демодулятора 36I. К выходу демодулятора 36I подключен вход усилителя постоянного тока 37I, к выходу которого подключен датчик момента 6 на оси 5 платформы 1.
В следящей системе стабилизации рамы внутреннего крена 8 (фиг.5) с усилителем переменного тока 35II, демодулятором 36II и усилителем постоянного тока 37II на входе подключен первый датчик угла 3I первого гироскопа 2I, а на выходе - датчик момента 10.
Следящая система стабилизации рамы тангажа 12 (фиг.6) содержит второй датчик угла 3II первого гироскопа 2I, усилитель переменного тока 35III, демодулятор 36III, усилитель постоянного тока 37III и датчик момента 14.
Следящая система стабилизации рамы внешнего крена 16 (фиг.7) содержит датчик положения 17, усилитель переменного тока 35IV, демодулятор 36IV, усилитель постоянного тока 37IV и датчик момента 19.
В схеме коммутации сигналов (фиг.8) выход "а" усилителя постоянного тока 37' подключен к первому входу первого коммутатора 38, к его второму входу подключен выход "б" усилителя постоянного тока 37II, а к третьему входу - выход "в" усилителя постоянного тока 37III.
К первому входу второго коммутатора 39 подключен выход "г" третьего акселерометра 4III. Выход "д" второго акселерометра 4II подключен к второму входу второго коммутатора 39, к третьему входу которого подключен выход "е" первого акселерометра 4I.
Выход первого коммутатора 38 подключен к сигнальному входу фазового демодулятора 40, к входу опорного напряжения которого подключен выход второго коммутатора 39.
Инерциальная платформа работает следующим образом. После включения питающих напряжений и выполнения операций горизонтирования и приведения в согласованное положение осей карданного подвеса с направлениями измерительных осей соответствующих гироскопов инерциальная платформа приходит в режим стабилизации основания 1 в азимуте, по крену и тангажу. При этом по сигналу с третьего датчика угла 3III датчик момента 6 отрабатывает рассогласование следящей системы рамы курса, обеспечивая стабилизацию направления вектора кинетического момента Н2 второго гироскопа 2II в азимуте и компенсируя возмущающие моменты вокруг оси Y. По сигналам первого 3I и второго 3II датчиков углов с помощью соответствующих датчиков момента 10 и 14 обеспечивается стабилизация направления вектора кинетического момента HI первого гироскопа 2' по направлению вертикали и компенсируются возмущающие моменты вокруг осей Х и Z соответственно. По сигналу датчика положения 17 датчик момента 19 отрабатывает рассогласование следящей системы стабилизации рамы внешнего крена 16, обеспечивая дополнительную, четвертую степень свободы для стабилизации основания 1 при неограниченных углах маневров объекта.
С выходов "г", "д", "е" соответственно третьего 4III, второго 4II и первого 4I акселерометров во внешнюю цепь поступают выходные сигналы, пропорциональные ускорениям по осям Y, Z, X.
Для установления массы грузов и их положения на рамах к выходу первого коммутатора 38 подключается предварительно его третий вход "в", к выходу второго коммутатора 39 подключается его первый вход "г" и задается линейное вибрационное воздействие по оси Y инерциальной платформы с частотой резонанса, вызывающей синхронные угловые колебания рамы внешнего крена 16 вокруг оси Z в пределах радиальной и осевой податливости V-образных диафрагм 31 обоих амортизаторов 22I, 22II. Предварительная масса m5 I пятых грузов 29I, 29II устанавливается исходя из условия равенства нулю напряжения постоянного тока с выхода "ж" фазового демодулятора 40. В зависимости от полярности выходного напряжения фазового демодулятора 40 пятые грузы 29I, 29II устанавливаются на внутренней обойме 21 либо первого 22I либо второго 22II амортизатора. После установки пятых грузов 29I, 29II вновь при подключении тех же сигналов на выходах обоих коммутаторов задается линейное вибрационное воздействие по оси Y с частотой резонанса, вызывающей синхронные угловые колебания рамы тангажа 12 вокруг оси Z, и по величине и знаку напряжения постоянного тока с выхода "ж" фазового демодулятора 40 определяется масса m2 и расположение относительно плоскости Y-Z на раме тангажа 12 вторых грузов 25I, 25II, при которых обеспечивается равенство нулю указанного напряжения. Затем после переключения только выхода первого коммутатора на вход "б" задается линейное вибрационное воздействие по оси Y с частотой резонанса, вызывающей синхронные угловые колебания рамы внутреннего крена 8, и по величине и знаку напряжения постоянного тока с выхода "ж" фазового демодулятора 40 определяется масса m1 и расположение первых грузов 24I, 24II на раме внутреннего крена 8 относительно плоскости X-Y.
Далее к выходу первого коммутатора 38 подключается его второй вход "б", к выходу второго коммутатора 39 подключается его второй вход "д" и задается линейное вибрационное воздействие по оси Z с частотой резонанса, на которой наблюдаются синхронные угловые колебания рамы внутреннего крена 8 вокруг оси X. Масса m3 третьего груза 27 устанавливается из условия равенства нулю напряжения постоянного тока на выходе "ж" фазового демодулятора 40. Расположение третьего груза 27 относительно плоскости X-Z определяется исходя из полярности выходного напряжения фазового демодулятора 40. Затем выход первого коммутатора 38 переключается на его первый вход "а", задается линейное вибрационное воздействие по оси Z с частотой резонанса, вызывающей синхронные угловые колебания основания 1 вокруг оси Y, и по величине и знаку напряжения постоянного тока с выхода "ж" фазового демодулятора 40 уточняется масса m5 и расположение пятых грузов 29I, 29II вместо пятых грузов 29I, 29II массой m4 I.
В завершение указанных действий к выходу первого коммутатора 38 подключается его третий вход "в", к выходу второго коммутатора 39 подключается его третий вход "е" и задается линейное вибрационное воздействие по оси Х инерциальной платформы с частотой резонанса, вызывающей синхронные угловые колебания рамы тангажа 12 вокруг оси Z. Масса m4 четвертых грузов 28I, 28II устанавливается из условия равенства нулю напряжения постоянного тока с выхода "ж" фазового демодулятора 40. В зависимости от полярности этого напряжения определяется положение четвертых грузов 28I, 28II на раме тангажа 12 относительно плоскости X-Z. После чего выход первого коммутатора 38 переключается на его первый вход "а", задается линейное вибрационное воздействие по оси Х с частотой резонанса, вызывающей синхронные угловые колебания основания 1 вокруг оси Y, и по величине и полярности напряжения постоянного тока на выходе "ж" фазового демодулятора 40 определяется суммарная масса m6 шестых грузов 30I, 30II и их расположение относительно плоскости X-Y на внутренних обоймах 21 обоих амортизаторов 22I, 22II.
При установке первых грузов 24I, 24II устраняются угловые колебания рамы внутреннего крена 8 относительно оси Х при наличии вибрационного воздействия по оси Y. Поэтому в эксплуатации при вибрационном воздействии по оси Y инерциальной платформы не возникает ускорение Кориолиса по измерительной оси второго акселерометра 4II. Посредством установки вторых грузов 25I, 25II устраняются угловые колебания рамы тангажа 12 относительно оси Z при вибрационном воздействии по оси Y и по измерительной оси первого акселерометра 4I не возникает ускорения Кориолиса. Наличие третьего груза 27 исключает угловые колебания рамы внутреннего крена 8 относительно оси Х при вибрационном воздействии по оси Z, чем устраняется возникновение ускорения Кориолиса по измерительной оси третьего акселерометра 4III. Размещением четвертых грузов 28I, 28II устраняются угловые колебания рамы тангажа 12 относительно оси Z при вибрационном воздействии по оси X. В результате при эксплуатационных воздействиях вибраций по оси Х на измерительной оси третьего акселерометра 4III исключаются ускорения Кориолиса. При установке пятых грузов 29I, 29II ликвидируются угловые колебания рамы внешнего крена 16 относительно оси Y при вибрационном воздействии по оси Z. В результате устраняется возникновение ускорения Кориолиса по измерительной оси первого акселерометра 4I. Путем размещения шестых грузов 30I, 30II устраняются угловые колебания рамы внешнего крена 16 относительно оси Y при вибрационном воздействии по оси Х и на измерительной оси второго акселерометра 4II не возникает ускорения Кориолиса.
Таким образом, при воздействии вибраций по любой из трех осей инерциальной платформы в измеряемые инерционные ускорения первым 4I, вторым 4II и третьим 4III акселерометрами не вносятся погрешности в виде ускорений Кориолиса. В результате повышается точность измерения инерционных ускорений по всем трем осям инерциальной системы.
Источники информации
1. Патент РФ №2123664 С1 кл. G 01 С 19/44. Самоориентирующийся в азимуте трехосный гиростабилизатор, 1996 г.
2. Акиндеев Ю.А., Воробьев В.Г. и др. Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации. М., Машиностроение, 1989 г., стр.311-316.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ВИБРАЦИОННОЙ УСТОЙЧИВОСТИ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ | 2005 |
|
RU2282153C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |






Изобретение относится к области приборостроения, а именно к системам навигации с гиростабилизированными инерциальными платформами. Инерциальная платформа содержит основание с тремя акселерометрами и двумя гироскопами в раме курса, установленной в карданный подвес с рамами внутреннего крена, тангажа и внешнего крена, следящие системы стабилизации каждой из рам, причем рама внешнего крена установлена на амортизаторах. Амортизаторы выполнены с имеющими кольцевую форму внутренней и внешней обоймами и диафрагмой, имеющей V-образный профиль. Рама внешнего крена установлена на двух амортизаторах на ее противоположных сторонах. На раме внутреннего крена в первой плоскости установлены два первых груза, на раме тангажа в первой плоскости установлены два вторых груза. На раме внутреннего крена на второй плоскости, перпендикулярной первой плоскости, расположен третий груз. На перпендикулярной первой плоскости второй плоскости на раме тангажа установлены два четвертых груза. На внутренней обойме одного из амортизаторов установлены два пятых груза, на внутренней обойме обоих амортизаторов расположены два шестых груза. Техническим результатом изобретения является повышение виброустойчивости и точности инерциальной платформы. 8 ил.
Инерциальная платформа, содержащая основание с расположенными на нем первым, вторым и третьим акселерометрами с направлением их измерительных осей соответственно по осям крена X, тангажа Z и курса Y, гироскопами с первым датчиком угла по оси крена, вторым датчиком угла по оси тангажа и третьим датчиком угла по оси курса; карданный подвес основания, представляющий собой, например, раму курса с рамами внутреннего крена и тангажа, установленными в раме внешнего крена, которая установлена в корпусе на амортизаторах, датчик момента на каждой из осей рам курса, внутреннего крена, тангажа и внешнего крена, следящие системы стабилизации рам курса, внутреннего крена и тангажа, каждая из которых содержит датчик угла гироскопа по соответствующей оси, усилитель переменного тока, демодулятор, усилитель постоянного тока и датчик момента на оси соответствующей рамы, следящую систему стабилизации рамы внешнего крена, содержащую датчик положения на оси рамы внутреннего крена, усилитель переменного тока, демодулятор, усилитель постоянного тока, датчик момента на оси рамы внешнего крена, причем на оси каждой рамы установлены подшипники, отличающаяся тем, что каждый амортизатор содержит имеющие кольцевую форму внешнюю и внутреннюю обоймы, между которыми расположена кольцевая диафрагма, имеющая V-образную форму профиля в любом из радиальных сечений амортизатора, рама внешнего крена установлена на двух амортизаторах, внутренняя обойма каждого из которых прикреплена к внешнему кольцу одного из подшипников на оси рамы внешнего крена, а внешняя обойма - к корпусу, амортизаторы расположены по отношению друг к другу симметрично относительно плоскости Y-Z; на раме внутреннего крена в плоскости Y-Z симметрично относительно оси Z по одну из сторон от плоскости X-Y расположены два первых груза массой m1 каждый, на раме тангажа в плоскости X-Z симметрично относительно оси Х по одну из сторон от плоскости Y-Z установлены два вторых груза массой m2 каждый, параллельно плоскости X-Z на одной из сторон рамы внутреннего крена установлен третий груз массой m3, равномерно распределенный относительно оси Y, на раме тангажа в плоскости X-Y параллельно плоскости X-Z и симметрично относительно оси Y установлены два четвертых груза массой m4 каждый, на внутренней обойме одного из амортизаторов в плоскости X-Y симметрично относительно оси Х установлены два пятых груза массой m5 каждый, на внутренних обоймах обоих амортизаторов в плоскости X-Z симметрично относительно оси Z по одну из сторон от плоскости X-Y установлены два шестых груза массой m6 каждый; суммарная масса первых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы внутреннего крена с первым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение третьего акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Y линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы внутреннего крена, положение первых грузов относительно плоскости X-Y выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса вторых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы тангажа с вторым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение третьего акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Y линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы тангажа, положение вторых грузов относительно плоскости Y-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; масса третьего груза выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы внутреннего крена с первым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение второго акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Z линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы внутреннего крена, положение третьего груза относительно плоскости X-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса пятых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы курса с третьим датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение второго акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Z линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы курса, положение пятых грузов относительно плоскости Y-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса четвертых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы тангажа с вторым датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение первого акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Х линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы тангажа, положение четвертых грузов относительно плоскости X-Z выполнено исходя из полярности вышеуказанного напряжения постоянного тока; суммарная масса шестых грузов выполнена из условия равенства нулю напряжения постоянного тока, полученного преобразованием выходного сигнала усилителя постоянного тока следящей системы стабилизации рамы курса с третьим датчиком угла одного из гироскопов посредством фазового демодулятора, используя выходное напряжение первого акселерометра в качестве опорного напряжения фазового демодулятора в процессе задания по оси Х линейного вибрационного воздействия с той резонансной частотой, которая вызывает синхронные угловые колебания рамы курса, положение шестых грузов относительно плоскости X-Y выполнено исходя из полярности вышеуказанного напряжения постоянного тока.
| АКИНДЕЕВ Ю.А | |||
| и др | |||
| Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации | |||
| - М.: Машиностроение, 1989, с.311-316 | |||
| СПОСОБ ПОВЫШЕНИЯ ВИБРАЦИОННОЙ УСТОЙЧИВОСТИ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ | 2005 |
|
RU2282153C1 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
| US 4292854 A, 06.10.1981 | |||
| Устройство для сопряжения источника и приемника информации | 1985 |
|
SU1278864A1 |
| US 20050085983 A1, 21.04.2005. | |||

