Изобретение относится к измерительной технике, а именно, к устройствам для определения пространственного положения объектов относительно горизонта и может быть использовано в системах стабилизации, наведения и управления, работающих на различных подвижных объектах. Выходные сигналы пропорциональные углам продольного и поперечного наклонов подвижного объекта формируются как в цифровом, так и в аналоговом виде.
В литературе подробно описаны гировертикали или авиагоризонты, используемые, например, для определения углов крена и дифферента корабля или углов крена или тангажа самолета (См., например, книгу Г.О. Фридлиндера и М.С. Козлова. Авиационные гироскопические приборы, стр. 39-48).
Указанные гировертикали не удовлетворяют требованиям, предъявляемым к объектам наземной техники вследствие специфики механических воздействий, угловых колебаний и т.д. и не могут быть в них использованы.
Наиболее близким по технической сущности к заявляемому устройству является гироскопический датчик крена (патент RU 2264597 С2, кл. G01C 19/44), являющийся прототипом предлагаемого изобретения, разрабатываемый для наземных самоходных объектов и серийно изготавливаемый на ОАО «Ковровский электромеханический завод». Датчик - прототип представляет собой трехстепенной астатический гироскоп с вертикальным расположением оси кинетического момента и устройством горизонтальной коррекции, содержащий гиромотор в кардановом подвесе, жидкостные маятниковые датчики типа ДЖМ-9Б, коррекционные двигатели, гасящие регулировочные резисторы, программируемые таймеры, исполнительные реле.
Жидкостные маятниковые датчики (далее по тексту - ДЖМ) являются чувствительными элементами отклонения оси кинетического момента Н (оси гиромотора) от вертикали места. Исполнительными элементами системы являются коррекционные двигатели, представляющие собой двухфазные двигатели переменного тока, обмотки возбуждения которых подключены параллельно фазам питания гиромотора, а обмотки управления соединены с соответствующими контактами ДЖМ.
Недостатками данного датчика крена - прототипа являются:
- большое время готовности к работе 2 мин - это связано со временем разгона гиромотора до номинальной частоты вращения для выхода оси Н в вертикаль места;
- ограниченные возможности повышения точности, присущие механическим гироскопам и связанным с необходимостью увеличения кинетического момента гиромотора, что в свою очередь приводит к увеличению габаритов прибора;
- недостаточная надежность и ресурс, за счет наличия большого количества механических соединений;
- ограниченная вибрационная и ударная устойчивость, присущая механическим гироскопам;
- ограниченные диапазоны измерения углов наклона;
- ограниченные возможности размещения датчика на объекте, из-за наличия однозначного рабочего положения, что присуще механическим гироскопам;
- ограниченные функциональные возможности датчика, из-за отсутствия цифрового выхода - информационного канала обмена с внешними устройствами.
Заявляемое изобретение обеспечивает создание универсального датчика крена и тангажа (далее по тексту - ДКТ), имеющего повышенную надежность, высокую точность измерений и расширенные функциональные возможности, что позволяет его применять в современных и перспективных системах стабилизации, наведения и управления, работающих на различных подвижных объектах.
Техническими задачами заявляемого изобретения являются:
- уменьшение времени готовности ДКТ к работе;
- повышение надежности конструкции ДКТ;
- уменьшение энергопотребления ДКТ;
- повышение инвариантности конструкции ДКТ к внешним ускорениям, устойчивости к воздействию ударов одиночного действия;
- исключение из конструкции ДКТ электромеханической схемы горизонтальной коррекции;
- увеличение точности определения ДКТ углов крена и тангажа;
- обеспечение диагностирования технического состояния ДКТ с передачей информации на внешние устройства;
- обеспечение включения ДКТ по логическому сигналу от системы управления объектом (далее по тексту - СУО) и отключения после снятия сигнала;
- обеспечение обработки ДКТ измеренных углов наклона с учетом коррекции крутизны и сигналов нуля;
- обеспечение выдачи ДКТ значений углов наклона в аналоговом виде для обеспечения сопряжения с аналоговыми системами;
- обеспечение выдачи ДКТ цифрового значения углов наклона по цифровому каналу информационного обмена;
- обеспечение возможности установки ДКТ в объекте применения в любом рабочем положении, с обеспечением настройки нулевого положения.
Поставленная техническая задача решается за счет того, что в известный датчик крена и тангажа (ДКТ), содержащий корпус, закрытый крышками, гироскоп, датчики положения вертикали места, согласно изобретению, дополнительно введены:
- источники питания (ИП);
- блок контроллеров (БК), выполняющий функции устройства цифровой обработки информации;
- блок электроэлементов «Кросс-плата» (БЭЭ «Кросс-плата»), выполняющий функцию транслирование и коммутация электрических цепей внутри ДКТ, а также обеспечивающий дистанционное включение ДКТ и защищающий электронные элементы ДКТ от импульсов повышенного напряжения бортовой сети подвижного объекта;
- блок электроэлементов «Модулятор» (БЭЭ «Модулятор»), выполняющий функцию модулирования внешнего источника переменного синусоидального напряжения 36 В 400 Гц по сигналам управления, поступающим с выходов БК,
при этом в качестве гироскопа применены три датчика абсолютных угловых скоростей (ДУС-Х, Y, Z) по трем ортогональным осям, размещенных в едином корпусе, а в качестве датчиков положения вертикали места применены три акселерометра по трем ортогональным осям (АК-Х, AK-Y, AK-Z) с датчиками температуры (ДТ),
причем чувствительные элементы трех датчиков абсолютных угловых скоростей (ДУС-Х, Y, Z) и трех акселерометров (АК-Х, AK-Y, AK-Z) жестко связаны через корпус датчика крена и тангажа (ДКТ) с корпусом объекта;
БЭЭ «Кросс-плата», с одной стороны, электрически связан с бортовой сетью объекта +27 В, источником переменного синусоидального напряжения 36 В 400 Гц и с входами и выходами источников питания (ИП) ДКТ,
а с другой стороны, электрически связан с соответствующими входами блока контроллеров (БК), входом БЭЭ «Модулятор», входом трех датчиков абсолютных угловых скоростей (ДУС-X, Y, Z), входами трех акселерометров (АК-Х, AK-Y, AK-Z) с датчиками температуры (ДТ),
при этом выходы трех датчиков абсолютных угловых скоростей (ДУС-Х, Y, Z) по трем ортогональным осям, выходы трех акселерометров (AK-X, AK-Y, AK-Z) по трем ортогональным осям и выходы трех датчиков температуры (ДТ) электрически связаны соответственно с первым, вторым, четвертым, шестым, третьим, пятым, седьмым входами БК, который электрически связан с входами пять, шесть, семь, восемь, девять, десять, одиннадцать, двенадцать БЭЭ «Модулятор», который, в свою очередь, с одной стороны, электрически связан с источником переменного синусоидального напряжения 36 В 400 Гц, транслируемого через БЭЭ «Кросс-плата», а с другой стороны, выходы БЭЭ «Модулятор» один, два, три, четыре связаны с соответствующими входами системы управления объектом, а выход тринадцать БЭЭ «Модулятор» соединен с входом шестнадцать блока контроллеров (БК),
причем, система управления объектом связана с блоком контроллеров (БК) посредством цифрового интерфейса, например канала типа CAN, а в блок контроллеров введен цифровой канал типа RS-232 для использования в технологических целях.
Кроме того, датчики абсолютных угловых скоростей конструктивно могут быть выполнены на базе твердотельных волоконно-оптических гироскопов, на базе твердотельных волновых гироскопов или на базе кольцевых лазерных гироскопов,
Существенными отличительными признаками заявляемого ДКТ являются:
- применение в качестве гироскопа трех датчиков абсолютной угловой скорости (ДУС-Х, Y, Z) по трем ортогональным осям, размещенных в едином корпусе.
- применение в качестве датчиков положения вертикали места трех акселерометров по трем ортогональным осям (АК-Х, AK-Y, AK-Z) с датчиками температуры (далее по тексту - ДТ);
- дополнительное применение источников питания (далее по тексту - ИП), блока контроллеров (далее по тексту - БК), блока электроэлементов (БЭЭ «Кросс-плата»), блока электроэлементов (БЭЭ «Модулятор»)
- функциональные связи введенных элементов в части жесткого крепления чувствительных элементов, а именно трех датчиков абсолютных угловых скоростей (ДУС-Х, Y, Z) и трех акселерометров (АК-Х, AK-Y, АК-Z) внутри корпуса ДКТ, установленного на объекте, и введение соединений вновь введенных блоков по вышеприведенному описанию;
- введение между БК и СУО цифрового канала информационного обмена типа CAN;
- введение в БК цифрового канала типа RS-232 для использования в технологических целях, например, в качестве технологического интерфейса, позволяющего производить его настройку и программирование от внешнего устройства.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в ДКТ позволяет получить следующие результаты:
- уменьшить время готовности ДКТ к работе (времени начального запуска) до 2 с., за счет исключения гиромотора и применения инерциальных датчиков угловых скоростей и ускорений (а именно - трех датчиков-абсолютных угловых скоростей (ДУС-Х, Y, Z) и трех акселерометров (АК-X, AK-Y, AK-Z));
- упростить и, как следствие, повысить надежность конструкции устройства, за счет исключения большого количества механических соединений;
- уменьшить энергопотребление с 75 Вт до 40 Вт, за счет исключения гиромотора и коррекционных двигателей;
- повысить инвариантность конструкции ДКТ к внешним ускорениям, устойчивости к воздействию ударов одиночного действия, за счет применения инерциальных датчиков угловых скоростей и ускорений;
- исключить электромеханическую схему горизонтальной коррекции с жидкостными маятниковыми датчиками, за счет применения инерциальных датчиков угловых скоростей и ускорений;
- увеличить точность определения углов крена и тангажа, за счет применения инерциальных датчиков угловых скоростей и ускорений с использованием цифровых адаптивных алгоритмов их обработки;
- обеспечить непрерывное диагностирование технического состояния ДКТ и передачи в СУО признака технического состояния, за счет цифрового алгоритма диагностики, реализованного программно в БК;
- обеспечить включение и выключение ДКТ по логическому сигналу от СУО, за счет введения в состав ДКТ БЭЭ «Кросс-плата», на котором реализована требуемая схема включения;
- обеспечить обработку измеренных углов наклона в части коррекции крутизны и сигналов нуля, за счет формирования алгоритма, реализованного программно в БК;
- обеспечить выдачу сигналов вычисленных значений углов наклона, модулированных внешним источником переменного синусоидального напряжения, на аналоговые выходы, за счет введения в состав ДКТ БЭЭ «Модулятор»;
- обеспечить выдачу вычисленного цифрового значения углов наклона по цифровому каналу информационного обмена, за счет введения в состав ДКТ БК, в котором реализован цифровой алгоритма ориентации в пространстве;
- обеспечить возможность установки ДКТ в объекте применения в любом рабочем положении и последующей настройки нулевого положения ДКТ без ухудшения его технических характеристик (требований точности), за счет применения в ДКТ инерциальных датчиков угловых скоростей и ускорений, позволяющих БК математически рассчитать параметры ориентации в пространстве.
В результате предлагаемый ДКТ представляет собой компактное законченное устройство, с выхода которого снимаются уже готовые измерительные данные в форме, удобной и для расчетов, и для визуализации, и для использования в системах стабилизации, наведения и управления, работающих на различных подвижных объектах. Устройство отличается готовностью подключения к автоматизированным системам сбора данных и управления без необходимости использования дополнительных преобразующих устройств.
Все элементы ДКТ не только компактно размещены в едином корпусе, но и жестко закреплены в нем: крышки зафиксированы относительно корпуса, а платы с элементами электронной схемы жестко закреплены в крышках. Благодаря отсутствию подвижных частей, конструкция датчика обладает повышенной устойчивостью по отношению к любым нагрузкам, в том числе вибрационным и ударным, что обеспечивает надежность работы датчика при любых условиях эксплуатации.
Блок контроллеров обеспечивает передачу измерительной информации в систему управления объектом, либо к головному вычислительному устройству прибора, куда заявляемый ДКТ может входить как составная часть.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого технического решения, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам заявляемого гироскопического датчика крена и тангажа для подвижных объектов. Это позволяет сделать вывод о соответствии заявляемой системы критерию «новизна».
Сравнение заявляемого универсального датчика крена для подвижных объектов с другими техническими решениями показывает, что отдельные отличительные признаки в технике широко известны. Так, известно применение триады ДУС и акселерометров в бесплатформенных инерциальных системах, в которых плоскость горизонта реализована математически, с использованием блоком контроллеров (БК) абсолютных данных от вышеуказанных датчиков угловых скоростей и ускорений и обработкой их по специальному алгоритму ориентации. Известно применение волоконно-оптических гироскопов, выполненных в одном корпусе. Однако не обнаружено применение указанных признаков в данной взаимосвязи с другими признаками для достижения вышеуказанного технического результата, следовательно, заявляемый универсальный датчик крена для подвижных объектов соответствует критерию «изобретательский уровень».
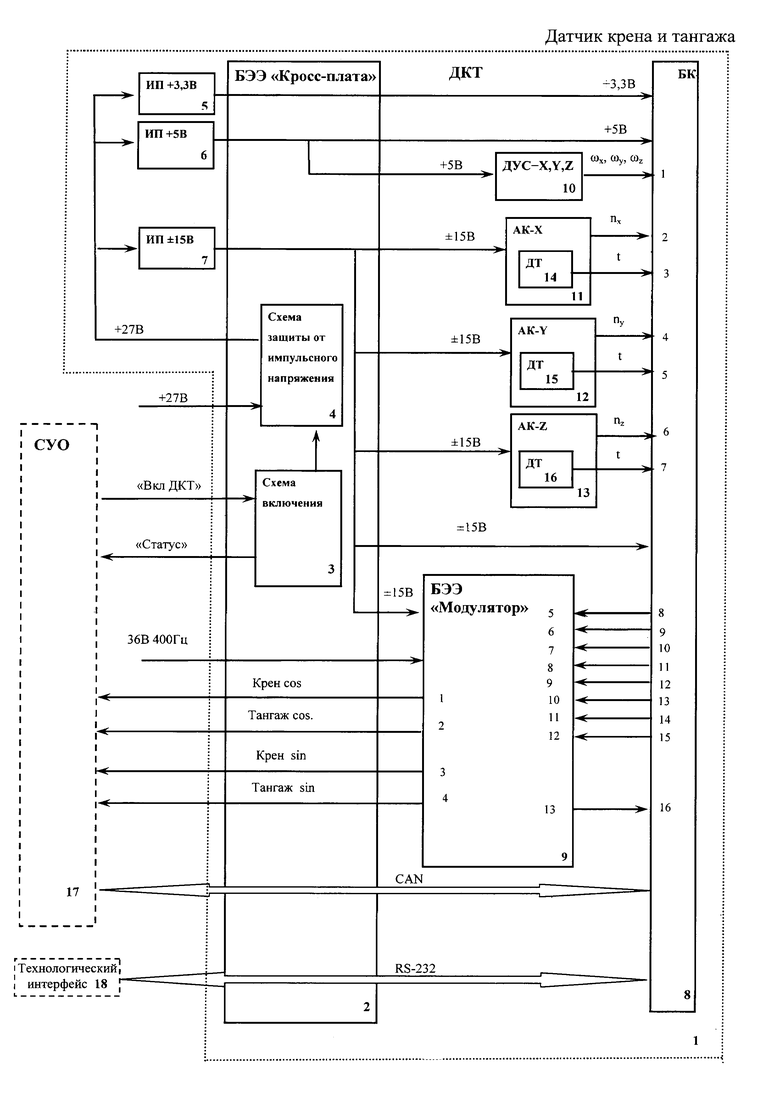
На фигуре приведена заявляемая структурная схема датчика крена и тангажа.
Сокращения, принятые в тексте и на фигуре:
АК-Х - акселерометр по оси X;
AK-Y - акселерометр по оси Y;
AK-Z - акселерометр по оси Z;
БЭЭ - блок электроэлементов;
БК - блок контроллеров;
ДЖМ - жидкостные маятниковые датчики;
ДКТ - датчик крена и тангажа;
ДУС-Х, Y, Z - три отдельных датчика абсолютных угловых скоростей по трем ортогональным осям;
ДТ - датчик температуры;
ИП - источник-питания;
СУО - система управления объектом;
nx, ny, nz - проекции вектора кажущегося ускорения шасси подвижного объекта на оси связанной с объектом системы координат;
t - значения температуры, формируемые датчиками температуры (ДТ);
ωх, ωy, ωz - проекции вектора абсолютной угловой скорости шасси подвижного объекта на оси связанной с объектом системы координат;
+27 В - постоянное напряжение бортовой сети подвижного объекта;
36 В 400 Гц - переменное синусоидальное напряжение.
ДКТ 1 содержит БЭЭ «Кросс-плата» 2 в состав, которого входит схема включения 3 и схема защиты от импульсного напряжения 4. При этом БЭЭ «Кросс-плата» 2, с одной стороны, электрически связан через схему защиты от импульсного напряжения 4 с бортовой сетью объекта «+27 В», источником переменного синусоидального напряжения «36 В 400 Гц» и с входами и выходами ИП 5, 6, 7, с другой стороны, с соответствующими входами БК 8, входом БЭЭ «Модулятор» 9, входом трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-Х, Y, Z) 10, размещенных в едином корпусе, входами трех акселерометров по трем ортогональным осям (X, Y, Z) 11, 12, 13 с ДТ 14, 15, 16.
Вход один БК 8 соединен с выходом трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-Х, Y, Z) 10, а входы два, три, четыре, пять, шесть, семь БК 8 соединены с выходами трех акселерометров по трем ортогональным осям (X, Y, Z) 11, 12, 13 с ДТ 14, 15, 16 соответственно. Выходы восемь, девять, десять, одиннадцать, двенадцать, тринадцать, четырнадцать, пятнадцать БК 8 соединены с соответствующими входами пять, шесть, семь, восемь, девять, десять, одиннадцать, двенадцать БЭЭ «Модулятор» 9, который, в свою очередь, с одной стороны, электрически связан с источником переменного синусоидального напряжения 36 В 400 Гц, транслируемого через БЭЭ «Кросс-плата» 2, а с другой стороны, выходы один, два, три, четыре БЭЭ «Модулятор» 9 связаны с соответствующими входами СУО 17, а выход тринадцать БЭЭ «Модулятор» 9 соединен с входом шестнадцать БК 8, при этом СУО 17 связана с БК 8 посредством цифрового интерфейса, например канала типа CAN, а БК 8 имеет технологический интерфейс 18 типа RS-232, обеспечивающий его настройку и программирование от внешнего устройства.
Описание основных принципов работы ДКТ.
Включение ДКТ 1 происходит при подаче команды +27 В «Вкл ДКТ» на схему включения 3, расположенную в БЭЭ «Кросс-плата» 2, схема включения, в свою очередь, подает напряжение питания +27 В на входы источников питания (ИП) 5, 6, 7 через схему защиты от импульсного напряжения 4 бортовой сети подвижного объекта. На выходе «Статус» схемы включения 3 БЭЭ «Кросс-плата» 2 в систему управления объектом СУО 17 формируется информация об одном из трех состояний ДКТ («не подано напряжение питания», «нет команды на включение ДКТ», «ДКТ включен»).
Источники питания ДКТ 5, 6, 7 используются для формирования вторичных напряжений, транслируемых через БЭЭ «Кросс-плата» 2 и необходимых для питания:
- трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-Х, Y, Z) 10;
- трех акселерометров по трем ортогональным осям (X, Y, Z) 11, 12, 13 с датчиками температуры 14, 15, 16;
- БЭЭ «Модулятор» 9;
- блока контроллеров (БК) 8.
В корпусе датчика крена и тангажа (ДКТ) 1 жестко установлены три датчика абсолютных угловых скоростей по трем ортогональным осям (ДУС-Х, Y, Z) 10 и три акселерометра по трем ортогональным осям (X, Y, Z) 11, 12, 13 с датчиками температуры (ДТ) 14, 15, 16. Оси чувствительности датчиков угловых скоростей и акселерометров ориентированы вдоль осей прямоугольной приборной системы координат ОХ, ОУ, OZ, связанной с корпусом датчика крена и тангажа (ДКТ) 1. Приборная система координат ОХ, ОУ, OZ совмещается с прямоугольной системой координат Ox, Оу, Oz, связанной с подвижным объектом при юстировке ДКТ 1 в составе объекта.
Реагируя на угловые скорости вращения и ускорения шасси подвижного объекта, представляющие собой проекции вектора абсолютной угловой скорости вращения и вектора кажущегося ускорения объекта на оси Ох, Оу, Oz, три датчика абсолютных угловых скоростей по трем ортогональным осям (ДУС-Х, Y, Z) 10 и три акселерометра по трем ортогональным осям (X, Y, Z) 11, 12, 13 формируют на входах блока контроллеров (БК) 8 датчика крена и тангажа (ДКТ) 1 информацию, необходимую для определения по заданному в нем алгоритму углов ориентации шасси подвижного объекта, а именно:
- информацию по абсолютным угловым скоростям (ωх, ωy, ωz) шасси подвижного объекта на оси, связанной с объектом системы координат, образуя, тем самым, ортогональную систему измерений абсолютных угловых скоростей шасси;
- информацию по абсолютным кажущимся ускорениям (nx, ny, nz) шасси подвижного объекта на оси, связанной с объектом системы координат, образуя, тем самым, ортогональную систему измерений кажущегося линейного ускорения шасси по двум горизонтальным и вертикальному каналу (X,Y,Z);
- информацию о текущем значении температуры (t) датчика крена и тангажа (ДКТ) 1, формируемую датчиками температуры (ДТ) 14, 15, 16, расположенными внутри акселерометров (АК-Х) 11, (АК-У) 12, (AK-Z) 13, которая используется для алгоритмической компенсации блоком контроллеров (БК) 8 температурных погрешностей трех датчиков абсолютных угловых скоростей (ДУС) 10 и трех акселерометров (АК-Х) 11, (АК-У) 12, (AK-Z) 13.
Алгоритм ориентации, реализованный в программе, записанной в блок контроллеров (БК) 8 датчика крена и тангажа (ДКТ) 1, построен на решении кинематических уравнений, записанных относительно искомых параметров ориентации. В качестве параметров ориентации использованы кватернионы, которые в результате пересчитываются блоком контроллеров (БК) 8 в традиционные углы тангажа и крена.
Предлагаемый ДКТ по структуре построения относится к классу бесплатформенных инерциальных систем, в которых плоскость горизонта реализована математически, с использованием блоком контроллеров (БК) 8 абсолютных данных от вышеуказанных датчиков угловых скоростей и ускорений и обработкой их по специальному алгоритму ориентации. Выходом ДКТ являются углы крена и тангажа подвижного объекта (См. книгу Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. М.: Наука, 1992. 280 с.).
Взаимодействие и передача полученной в ходе вычислений информации между блоком контроллеров (БК) 8 датчика крена и тангажа (ДКТ) 1 и СУО 17 осуществляется через цифровой канал информационного обмена типа CAN и в аналоговом виде (выходы 1, 2, 3, 4 БЭЭ «Модулятор» 9).
БЭЭ «Модулятор» 9 работает следующим образом:
Выходы 8, 9, 10, 11, 12, 13, 14, 15 блока контроллеров (БК) 8 управляют через входы 5, 6, 7, 8, 9, 10, 11, 12 БЭЭ «Модулятор» 9 работой восьми логических ключей (по два на каждый канал, для смены фазы выходного напряжения). Вход первого ключа из пары соединен с выходом инвертирующего операционного усилителя, а вход второго ключа соединен с выходом операционного усилителя выполняющего роль повторителя напряжения. Операционные усилители в свою очередь соединены с выходом-трансформатора, на вход которого подается переменное напряжение 36 В 400 Гц. Выходы первого и второго ключей из пары заведены на сумматор, выход которого соединен с интегратором. Выходной сигнал интегратора усиливается и через развязывающий трансформатор подается на соответствующий выход 1, 2, 3, 4 БЭЭ «Модулятор» 9.
Т.е. блок контроллеров (БК) 8, в соответствии с заложенным в него алгоритмом, осуществляет широтно-импульсное модулирование внешнего источника переменного напряжения 36 В 400 Гц, подаваемого в БЭЭ «Модулятор» 9, и формирует аналоговые значения углов наклона подвижного объекта на выходах 1 (крен cos), 3 (крен sin), 2 (тангаж cos), 4 (тангаж sin) БЭЭ «Модулятор» 9.
Выход 13 БЭЭ «Модулятор» 9 соединен с входом 16 блока контроллеров (БК) 8 для контроля наличия переменного напряжения, подаваемого в БЭЭ «Модулятор» 9.
В блок контроллеров (БК) 8 введен цифровой канал типа RS-232 для использования в технологических целях, например, в качестве технологического интерфейса 18, позволяющего производить его настройку и программирование от внешнего устройства.
Таким образом, поставленные в заявке технические задачи достигнуты.
Предлагаемый изобретением универсальный датчик крена и тангажа представляет собой компактное законченное устройство, с выхода которого снимаются уже готовые измерительные данные в форме, удобной и для расчетов, и для визуализации, и для использования в системах стабилизации, наведения и управления, работающих на различных подвижных объектах. Устройство отличается готовностью подключения, к автоматизированным системам сбора данных без необходимости использования дополнительных преобразующих устройств и обеспечивает повышенную надежность и высокую точность измерений для современных и перспективных систем управления объектами.
Таким образом, изобретение позволяет, за счет организации новой структуры построения ДКТ, значительно расширить совместно с системой управления подвижным объектом возможности применения подвижного объекта, поднять его надежность, живучесть, улучшить его технические и эксплутационные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
Изобретение относится к измерительной технике, а именно к устройствам для определения пространственного положения объектов относительно горизонта, и может быть использовано в системах стабилизации, наведения и управления, работающих на различных подвижных объектах. Технический результат – расширение функциональных возможностей. Для этого в известный датчик крена и тангажа дополнительно введены с соответствующими связями с другими элементами источники питания, блок контроллеров, блок электроэлементов «Кросс-плата», блок электроэлементов «Модулятор», при этом в качестве гироскопа применены три датчика абсолютных угловых скоростей по трем ортогональным осям, размещенных в едином корпусе, в качестве датчиков положения вертикали места применены три акселерометра по трем ортогональным осям с датчиками температуры, а также введены в датчик крена и тангажа цифровые каналы информационного обмена типа CAN и RS-232. Таким образом, достигается универсальность датчика крена и тангажа, имеющего повышенную надежность, высокую точность измерений и расширенные функциональные возможности, что позволяет его применять в современных и перспективных системах стабилизации, наведения и управления, работающих на различных подвижных объектах. 3 з.п. ф-лы, 1 ил.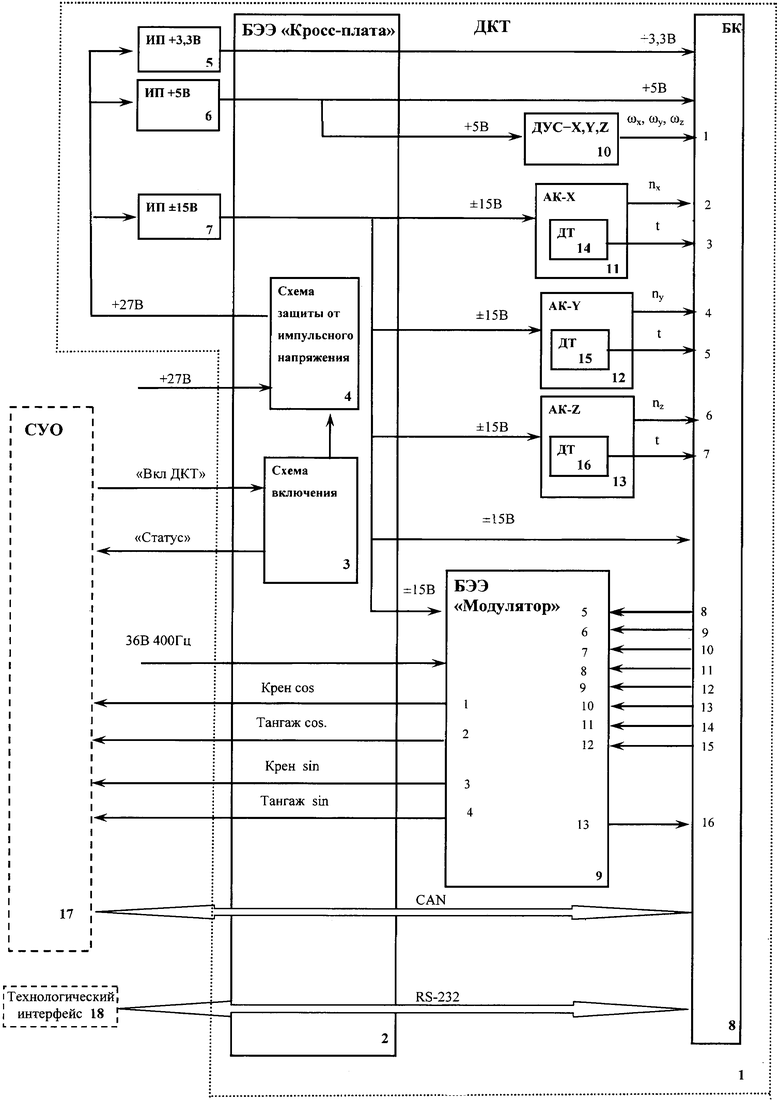
1. Датчик крена и тангажа, содержащий корпус, закрытый крышками, гироскоп, датчики положения вертикали места, отличающийся тем, что в него дополнительно введены источники питания,
блок контроллеров, выполняющий функции устройства цифровой обработки информации,
блок электроэлементов «Кросс-плата», выполняющий функцию транслирования и коммутации электрических цепей внутри датчика крена и тангажа, а также обеспечивающий дистанционное включение датчика крена и тангажа и защищающий электронные элементы датчика крена и тангажа от импульсов повышенного напряжения бортовой сети подвижного объекта,
блок электроэлементов «Модулятор», выполняющий функцию модулирования внешнего источника переменного синусоидального напряжения 36 В 400 Гц по сигналам управления, поступающим с выходов блока контроллеров,
при этом в качестве гироскопа применены три датчика абсолютных угловых скоростей по трем ортогональным осям, размещенных в едином корпусе,
а в качестве датчиков положения вертикали места применены три акселерометра по трем ортогональным осям с датчиками температуры,
причем чувствительные элементы трех датчиков абсолютных угловых скоростей и трех акселерометров жестко связаны через корпус датчика крена и тангажа с корпусом объекта,
кроме того, блок электроэлементов «Кросс-плата» с одной стороны электрически связан с бортовой сетью объекта +27 В, источником переменного синусоидального напряжения 36 В 400 Гц и с входами и выходами источников питания датчика крена и тангажа,
а с другой стороны электрически связан с соответствующими входами блока контроллеров, входом блока электроэлементов «Модулятор», входом трех датчиков абсолютных угловых скоростей, входами трех акселерометров с датчиками температуры,
при этом выходы трех датчиков абсолютных угловых скоростей по трем ортогональным осям, выходы трех акселерометров по трем ортогональным осям и выходы трех датчиков температуры электрически связаны соответственно с первым, вторым, четвертым, шестым, третьим, пятым, седьмым входами блока контроллеров, выходы которого электрически связаны с соответствующими входами блока электроэлементов «Модулятор», который, в свою очередь, с одной стороны электрически связан с источником переменного синусоидального напряжения 36 В 400 Гц, транслируемого через блок электроэлементов «Кросс-плата», а с другой стороны через соответствующие выходы электрически связан с входами системы управления объектом, а также с входом блока контроллеров,
причем, система управления объектом связана с блоком контроллеров посредством цифрового интерфейса, например, канала типа CAN, а в блок контроллеров введен цифровой канал типа RS-232 для использования в технологических целях.
2. Датчик крена и тангажа по п. 1, отличающийся тем, что датчик абсолютных угловых скоростей конструктивно выполнен на базе твердотельных волоконно-оптических гироскопов.
3. Датчик крена и тангажа по п. 1, отличающийся тем, что датчик абсолютных угловых скоростей конструктивно выполнен на базе твердотельных волновых гироскопов.
4. Датчик крена и тангажа по п. 1, отличающийся тем, что датчик абсолютных угловых скоростей конструктивно выполнен на базе кольцевых лазерных гироскопов.
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2003 |
|
RU2264597C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| ФРИДЛЕНДЕР Г.О | |||
| и др | |||
| Авиационные гироскопические приборы, М., Оборонгиз, 1961, с.39-48 | |||
| US 3204894 А1, 07.09.1965 | |||
| ПО "КОВРОВСКИЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАВОД" | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| "Реклама", Красногорская межрайонная типография | |||
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |

