Изобретение относится к области радиотехники и может использоваться в радиоразведке, радионавигации и радиолокации для определения направления на источник излучения или отражения радиоволн.
Известно устройство для определения положения источников электромагнитного излучения (аналог) см. патент США № 4383301, МПК G 01 S 5/02, 7/04, содержащее антенную решетку для приема излучений и формирования соответствующих сигналов, приемную систему для измерения фазы и интенсивности каждого принятого сигнала, устройство отработки сигналов для обработки когерентных сигналов фазы и амплитуды и воспроизведения местоположения источников принятого излучения.
Известен также радиопеленгатор по заявке № 1333546, Великобритания, МПК G 01 S 3/48, 3/10 (аналог), который имеет в своем составе антенную решетку, состоящую из нескольких пар равномерно разнесенных антенных элементов, и устройство обработки. Сигналы с каждой пары антенных элементов, поступают на фазовые дискриминаторы, которые осуществляют измерение разности фаз. Фазы сигналов, полученные с четырех наиболее далеко расположенных пар антенных элементов преобразуются в четыре двоичных кода и усредняются путем суммирования. Логическое устройство устраняет неоднозначность и формирует двоичный сигнал, характеризующий угол прихода электромагнитной волны.
Недостатком аналогов является относительно низкая точность пеленгации, обусловленная ограниченными размерами антенных систем.
Из известных устройств наиболее близким по технической сущности к заявляемому (прототипом) является фазовый пеленгатор, схема которого приведена на рис.8.1 с.195 В.А.Чердынцев «Радиотехнические системы». Минск, «Вышэйшая школа», 1988, 369 с.
Известный фазовый пеленгатор содержит первую и вторую антенны, разнесенные на определенное расстояние, первый и второй приемные тракты, соединенные входами с первой и второй антеннами соответственно, первый фазовращатель, соединенный входом с выходом первого приемного тракта, и первый фазовый детектор, соединенный одним входом с выходом первого фазовращателя, вторым входом с выходом второго приемного тракта, а выход фазового детектора является выходом пеленгатора.
Принцип измерения угловых координат источников излучения или отражения радиоволн в известном пеленгаторе реализуется путем сравнения в фазовом детекторе сигналов, принятых антеннами. Напряжение на выходе фазового детектора пропорционально угловому положению объекта пеленгации. При этом пеленгационная характеристика имеет вид (1):

Здесь d - расстояние между антеннами,
θ - угловое положение объекта пеленгации относительно нормали к линии, связывающей фазовые центры антенн.
λ - рабочая длина волны радиопеленгатора.
Недостатком прототипа является сравнительно невысокая точность пеленгации и зависимость этой точности от углового положения объекта пеленгации.
Эта точность характеризуется среднеквадратичной погрешностью (2):

где q - отношение сигнал/шум по мощности на входе устройства принятия решения,
L - эквивалентная (среднеквадратичная) длина антенной системы. Значение эквивалентной длины связано с геометрическим размером антенной системы соотношением L=k·d, где k≤1 - коэффициент, учитывающий форму пеленгационной характеристики. В этом случае (2) приобретает вид

Здесь  - характеризует ширину пеленгационной характеристики (1), и именно эта ширина определяет область отсчета пеленга и, следовательно, погрешность. Возможности уменьшения ширины характеристики за счет увеличения d и тем самым повышения точности пеленгации часто ограничены конструктивными соображениями, особенно на подвижных средствах пеленгации.
- характеризует ширину пеленгационной характеристики (1), и именно эта ширина определяет область отсчета пеленга и, следовательно, погрешность. Возможности уменьшения ширины характеристики за счет увеличения d и тем самым повышения точности пеленгации часто ограничены конструктивными соображениями, особенно на подвижных средствах пеленгации.
Зависимость точности пеленгации от углового положения объекта пеленгации следует из самого принципа фазовой пеленгации и связана с тем, что отношение сигнал/шум на выходе фазового детектора пропорционально квадрату синуса угла, т.е. q=sin2θ. Это приводит к тому, что в сравнительно большом секторе углов точность пеленгации в соответствии с (3) ухудшается.
Задача, на решение которой направлено заявляемое устройство, состоит в сужении области отсчета параметра путем обработки сигналов при определении пеленга на источник излучения или отражения радиоволн и в формировании момента отсчет на высоком и постоянном уровне сигнала.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в повышении точности пеленгации и исключении ее зависимости от углового положения объекта пеленгации.
Технический результат достигается тем, что в известный фазовый пеленгатор, содержащий первую и вторую антенны, разнесенные на определенное расстояние, первый и второй приемные тракты, соединенные входами с первой и второй антеннами соответственно, первый фазовращатель, соединенный входом с выходом первого приемного тракта, и первый фазовый детектор, соединенный одним входом с выходом первого фазовращателя, введены второй фазовращатель, соединенный входом с выходом первого приемного тракта, третий управляемый фазовращатель, соединенный первым входом с выходом второго приемного тракта, а выходом со вторым входом первого фазового детектора, второй фазовый детектор, соединенный одним входом с выходом второго фазовращателя, а другим входом с выходом третьего управляемого фазовращателя, первый и второй ограничители снизу на нулевом уровне, соединенные входами с выходами первого и второго фазовых детекторов соответственно, первый сумматор, соединенный первым и вторым прямыми входами с выходами первого и второго ограничителей снизу на нулевом уровне соответственно, второй сумматор, соединенный первым прямым входом с выходом первого ограничителя снизу на нулевом уровне, а вторым инверсным входом с выходом второго ограничителя снизу на нулевом уровне, первое и второе устройства вычисления модуля, соединенные первое входом с выходом первого сумматора, второе входом с выходом второго сумматора, вычитающее устройство, соединенное входом уменьшаемого с выходом первого устройства вычисления модуля, а входом вычитаемого с выходом второго устройства вычисления модуля, третий сумматор, соединенный первым и вторым прямыми входами с выходами первого и второго устройств вычисления модуля соответственно, усилитель, соединенный входом с выходом вычитающего устройства, компаратор, соединенный первым входом с выходом усилителя, а вторым входом с выходом третьего сумматора, ключевая схема, соединенная первым входом с выходом компаратора, генератор управляющего напряжения, соединенный выходом со вторыми входами третьего управляемого фазовращателя и ключевой схемы одновременно, а выход ключевой схемы является выходом пеленгатора. Кроме того, фазовые сдвиги в первом и втором фазовращателях устанавливаются фиксированными и взаимно противоположными.
Сущность предлагаемого изобретения заключается в получении узкой области отсчета пеленга из сигналов пересечения и объединения, которые формируются из входных сигналов, поступающих на антенны и жестко связанны этой областью.
Предлагаемое изобретение поясняется графическим материалом.
На фиг.1 представлена структурная схема фазового пеленгатора. На фиг.2, 3, 4 показаны зависимости амплитуд сигналов от угла отклонения для различных точек схемы, рассчитанные теоретически. На фиг.5-10 представлены сигналы в различных точках схемы по результатам моделирования.
Фазовый пеленгатор (фиг.1) содержит первую 1 и вторую 2 антенны, разнесенные на определенное расстояние d, первый 3 и второй 4 приемные тракты, первый 5 и второй 6 фазовращатели с фиксированными и противоположными фазовыми сдвигами, третий управляемый фазовращатель 7, первый 8 и второй 9 фазовые детекторы, первый 10 и второй 11 ограничители снизу на нулевом уровне, первый сумматор 12 с двумя прямыми входами, второй сумматор 13 с первым прямым и вторым инверсным входами, первое 14 и второе 15 устройства вычисления модуля, вычитающее устройство 16 с одним входом уменьшаемого, а другим входом - вычитаемого, третий сумматор 17, усилитель 18, ключевую схему 19, компаратор 20, генератор управляющего напряжения 21.
Введение второго фазовращателя 6 и второго фазового детектора 9 и установка в первом 5 и втором 6 фазовращателях фиксированных и взаимно противоположных фазовых сдвигов позволяет получить на выходе фазовых детекторов напряжения, сдвинутые относительно друг друга по фазе, угловые зависимости которых пересекаются на постоянном и высоком уровне на равносигнальном направлении. Эти напряжения формируются из сигнала, принятого первой антенной.
Введение генератора управляющего напряжения 21 и третьего управляемого фазовращателя 7 обеспечивает сканирование равносигнального направления за счет изменения фазы опорного напряжения, формируемого из сигнала, поступающего на вторую антенну.
Введение ограничителей снизу на нулевом уровне 10 и 11 «обрезает» отрицательные ветви напряжений с выхода фазовых детекторов, исключая ложные пеленги за счет этих ветвей.
Введение первого сумматора 12 с двумя прямыми входами, второго сумматора 13 с прямым и инверсным входами, первого 14 и второго 15 вычислителей модуля, вычитающего устройства 16 и третьего сумматора 17 с двумя прямыми входами обеспечивает формирование из двух сдвинутых и пересекающихся на равносигнальном направлении напряжений сигналов «пересечения» и «объединения», жестко связанных между собой общей точкой, находящейся по углу на равносигнальном направлении, а на уровне, задаваемом фазовращателями, - с фиксированным фазовым сдвигом.
Введение усилителя 18 и компаратора 19 обеспечивает формирование из сигналов «пересечения» и «объединения» узкой области в окрестностях равносигнального направления, определяющей момент отсчета пеленга и являющейся результирующей пеленгационной характеристикой, определяющей точность пеленгации при заданном отношении сигнал/шум на выходе приемных каналов.
Введение ключевой схемы 20 обеспечивает прохождение на выход для дальнейшей оценки напряжения с генератора управляющего напряжения в момент действия разрешающего напряжения, соответствующего пеленгационной характеристике.
Принцип действия заявляемого пеленгатора заключается в следующем.
Пусть объект пеленгации находится под углом 9 относительно нормали к линии связи между антеннами (фиг.1).
Принимаемые антеннами 1 и 2 от объекта пеленгации сигналы усиливаются и преобразуются на промежуточную частоту приемными трактами 3 и 4. На выходе первого 5 и второго 6 фазовращателей соответственно будем иметь следующие напряжения:


Здесь ω0 - угловая частота,
ϕ1 - начальная фаза сигнала с первой антенны,
Um - амплитуда,
±β - фиксированные и взаимно противоположные фазовые сдвиги, обеспечиваемые фазовращателями 5 и 6.
Сигнал на выходе третьего управляемого фазовращателя 7 является опорным для первого 8 и второго 9 фазовых детекторов и имеет вид

где ϕ2 - начальная фаза сигнала со второй антенны,
α(t) - составляющая фазы опорного напряжения, обеспечивающая однократное или периодическое сканирование равносигнального направления в пределах заданного сектора.
При этом α(t)=k1U(t),
где U(t) - управляющее напряжение генератора,
k1 - коэффициент пропорциональности.
Закон изменения U(t) в общем случае произвольный и реализуется генератором 21, который управляет фазовращателем 7.
Здесь α(t) представляет собой относительно медленно изменяющуюся составляющую фазы опорного напряжения по сравнению с быстроизменяющейся «текущей» составляющей фазы ω0t.
Напряжения (4) и (5) поступают соответственно на первые входы фазовых детекторов 8 и 9. Сигнал (6) поступает в качестве опорного на вторые входы детекторов одновременно. В соответствии с алгоритмом работы балансного фазового детектора можно показать, что сигналы на выходах фильтров нижних частот первого 8 и второго 9 фазовых детекторов соответственно будут


При получении (7) и (8) для упрощения анализа принято, что Um=1, kд=1 (kд - коэффициент детектирования фазового детектора).
Здесь Δϕ - разность фаз между принятыми антеннами 1 и 2 сигналами, обусловленная разностью хода волн из-за отклонения объекта пеленгации от равносигнального направления, которая определяется выражением

Зависимости (7) и (8) представлены на фиг.2. Здесь приведен случай, когда θ=0, а аргументом является составляющая фазы α.
Рабочим сектором углов, обеспечивающим формирование пеленгационной характеристики, является сектор, в котором положительные ветви напряжений (7) и (8) пересекаются. Величина этого сектора определяется соотношением

где  при
при 
Напряжения (7) и (8) подаются на первый (10) и второй (11) ограничители снизу на нулевом уровне. Ограничители исключают отрицательные ветви напряжений, где также имеет место пересечение (7) и (8).
Положение рабочего сектора на угловой оси определяется значением 9 (положением объекта пеленгации).
Далее напряжение с выхода первого ограничителя одновременно поступает на первый прямой вход первого сумматора 12 и первый прямой вход второго сумматора 13. Напряжение с выхода второго ограничителя снизу одновременно поступает на второй прямой вход первого сумматора и второй инверсной вход второго сумматора. В результате на выходе первого и второго сумматоров будут соответственно суммарное и разностное напряжения U∑=U1+U2 и UΔ=U1-U2.
Суммарное напряжение, пройдя через первый вычислитель модуля 14, поступает одновременно на вход уменьшаемого вычитающего устройства 16 и на первый прямой вход третьего сумматора 17. Разностное напряжение, пройдя через второй вычислитель модуля 15, поступает одновременно на вход вычитаемого вычитающего устройства и на второй прямой вход третьего сумматора. Модули суммарного |U∑| и разностного напряжений |UΔ| на выходе соответствующих вычислителей модуля приведены на фиг.3.
На выходе вычитающего устройства будет иметь место напряжение, соответствующее пересечению сигналов с выходов ограничителей снизу, а на выходе третьего сумматора напряжение, соответствующее объединению этих сигналов:


На основании (11) и (12) из анализа рисунков (фиг.2-3) можно записать:

Сигналы пересечения и объединения жестко связаны между собой общей точкой, в которой пересекаются U1 и U2. Положение этой точки обеспечивается на высоком энергетическом уровне сигнала выбором значения |±β| в фазовращателях 5 и 6 и не зависит от углового смещения объекта пеленгации и амплитуды сигнала.
Далее сигнал пересечения усиливается в усилителе 18 с коэффициентом усиления С≥1 и сравнивается на компараторе 19 с сигналом объединения. В результате формируется узкая область отсчета угла, которая представляет собой пеленгационную характеристику. Ширина этой области определяется соотношением

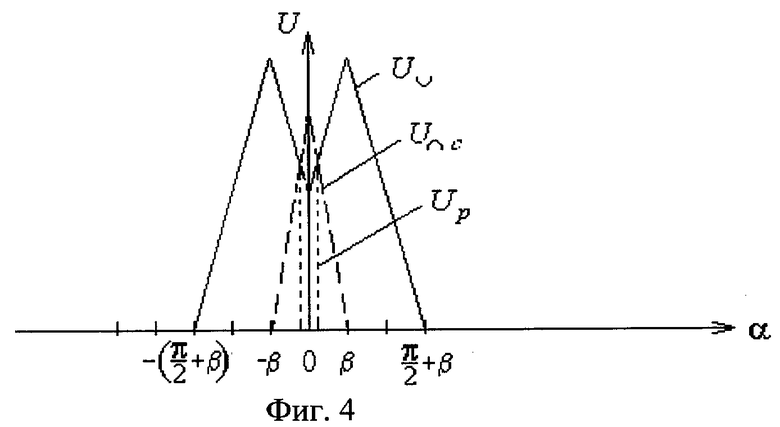
Сигналы пересечения на выходе усилителя U∩C, объединения U∪ на выходе третьего сумматора и результирующая пеленгационная характеристика Up на выходе компаратора приведены на фиг.4. Как видно из рисунка, область отсчета пеленга симметрична относительно равносигнального направления.
Положение равносигнального направления в каждый данный момент определяется значением напряжения генератора управляющего напряжения 21, перестраивающего фазу управляемого фазовращателя. Одновременно напряжение генератора подается на один вход ключевой схемы 20 и проходит на ее выход только в том случае, если на втором входе этой схемы действует разрешающее напряжение Up с выхода компаратора, соответствующее области отсчета пеленга.
Выходное напряжение ключевой схемы u(t) пропорционально угловому положению объекта пеленгации, которое может быть найдено в момент отсчета из соотношения

где k1 - коэффициент пропорциональности.
Определим ширину области отсчета пеленга (пеленгационной характеристики), приняв θ=0 и рассмотрев область α слева от нуля в рабочей зоне (фиг.4), используя (13)-(15) с учетом (7), (8). Тогда (15) преобразуется к виду

В результате преобразования (17) получим:

Аналогичное соотношение может быть получено при анализе пеленгационной характеристики справа от нуля.
Исходя из физического смысла при нахождении ширины пеленгационной характеристики, правая часть (18) должна быть взята по модулю и удвоена. Тогда для небольших значений α справедливо соотношение

С учетом (9) для небольших θ ширину области отсчета пеленга в действительных значениях угла получим в виде

Как видно из (20), ширина пеленгационной характеристики при фиксированном значении  зависит от коэффициента усиления усилителя С и значения фиксированного фазового сдвига β в фазовращателях 5 и 6.
зависит от коэффициента усиления усилителя С и значения фиксированного фазового сдвига β в фазовращателях 5 и 6.
Значение коэффициента усиления усилителя С определяется требуемой точностью пеленгации, уровнем шума, значением фиксированного фазового сдвига |β| и показателями качества обнаружения - измерения. Выбор диапазона изменений β, задающего уровень пересечения сигналов на выходах фазовых детекторов, может быть произведен из условия

где m - уровень пересечения сигналов на выходах фазовых детекторов. На основании (21) с учетом (7) для U1 можно записать:

После преобразований получим:
Уровень пересечения m следует ограничить некоторым диапазоном верхнего mв и нижнего mн значений

Тогда диапазон возможных значений β определяется соотношением

Если принять, что mн=0,5 mmax, а mв=0,8 mmax, где mmax - максимальное значение относительно уровня сигнала на выходе фазовых детекторов, и учитывая (7), что mmax=2, то диапазон допустимых значений β лежит в пределах

Конкретное значение фазового сдвига (3 определяется из (23) при заданном m. Например, для m=0,7 mmax β=30,7°.
Необходимо подчеркнуть, что заданный уровень пересечения, определяющий область отсчета пеленга, сохраняется неизменным во всем диапазоне сканирования равносигнального направления за счет изменения фазы третьего фазовращателя с помощью генератора управляющего напряжения.
Сектор сканирования определяется из условия однозначности отсчета пеленга, поскольку напряжения на выходе фазовых детекторов имеют периодический характер.
Анализ поведения (7), (8), (11), (12) при изменении α, β и θ показывает, что величина сектора сканирования определяется угловым расстоянием между ближайшими отрицательными максимумами напряжений U1 и U2. Это расстояние зависит (в пределах нескольких градусов) от выбранного значения β. Если значение фазового сдвига β находится в пределах диапазона допустимых значений (26), то величина сектора сканирования равносигнальным направлением ΔФ лежит в пределах

т.е. |ΔФ|≤(76-80)°.
Закон изменения управляющего напряжения генератора может быть выбран соответствующим закону изменения разности фаз (9) на выходах антенн, т.е.

где k2 - коэффициент пропорциональности. Это упрощает определение пеленга, обеспечивая его адекватность, как и самого момента отсчета, истинному значению пеленга объекта пеленгации.
Значение сектора сканирования (27) позволяет определить параметры управляющего напряжения генератора.
На основании (28) с учетом (27) можно записать:

Здесь ΔT - период сканирования, выбор которого связан с используемой элементной базой, например типом управляемого фазовращателя, тактическим характером решаемой задачи обнаружения-измерения, типом пеленгуемого сигнала и может быть произведен при конкретном проектировании. Однако в качестве граничного значения периода сканирования можно использовать неравенство

где τф - постоянная времени фильтра нижних частот в фазовых детекторах.
При известном секторе сканирования |ΔФ| и периоде ΔT на основании (29) определяется значение коэффициента k2.
Проведем сравнительную оценку точности пеленгации в предлагаемом пеленгаторе и прототипе.
Из теории антенных систем известно, что ширина пеленгационной характеристики θр на определенном уровне связана с относительным размером антенной системы  соотношением
соотношением

где kp - коэффициент пропорциональности.
Тогда с учетом (31) выражение для среднеквадратичной погрешности пеленгации (3) приобретет вид
Для прототипа ширину пеленгационной характеристики найдем из (1), приняв для конкретности относительный размер антенной системы  . В этом случае для уровня половинной мощности ширина пеленгационной характеристики составит θр≈18°.
. В этом случае для уровня половинной мощности ширина пеленгационной характеристики составит θр≈18°.
Для заявляемого устройства при тех же условиях 
 - обеспечивается уровень пересечения по половинной мощности) и коэффициенте усиления С=1,2 ширина пеленгационной характеристики составляет θр≈2°.
- обеспечивается уровень пересечения по половинной мощности) и коэффициенте усиления С=1,2 ширина пеленгационной характеристики составляет θр≈2°.
В соответствии с (32) выигрыш в точности пеленгации заявляемого пеленгатора по сравнению с прототипом обеспечивается примерно на порядок.
Кроме того, в заявляемом пеленгаторе формирование момента отсчета пеленга, на которое влияют шумы и помехи, всегда на постоянном и высоком для данного сигнала уровне мощности независимо от углового положения объекта пеленгации. Само же определение пеленга производится по напряжению генератора, которое не подвергается воздействию шумов и помех. Этим в заявляемом пеленгаторе исключается зависимость точности пеленгации от самого пеленга, как это имеет место в прототипе.
Для проверки работоспособности, эффективности и возможности реализации предлагаемого изобретения проведено математическое моделирование работы схемы (фиг.1) на ПЭВМ. В качестве исходных данных приняты следующие: относительное расстояние между антеннами  ; значение коэффициента усиления усилителя 18 С=1,2; фазовый сдвиг в фазовращателях 5, 6
; значение коэффициента усиления усилителя 18 С=1,2; фазовый сдвиг в фазовращателях 5, 6  что обеспечивает уровень пересечения напряжений фазовых детекторов m=0,7 mmax; закон изменения управляющего напряжения генератора 21 синусоидальный (28) для обеспечения наглядности и непосредственного отсчета пеленга по оси абсцисс, сектор сканирования равносигнальным направлением принят равным ±π для получения полной картины напряжений; угловое положение объекта пеленгации принято равным θ1=10°, при этом
что обеспечивает уровень пересечения напряжений фазовых детекторов m=0,7 mmax; закон изменения управляющего напряжения генератора 21 синусоидальный (28) для обеспечения наглядности и непосредственного отсчета пеленга по оси абсцисс, сектор сканирования равносигнальным направлением принят равным ±π для получения полной картины напряжений; угловое положение объекта пеленгации принято равным θ1=10°, при этом

a ϕ2=0, Δϕ=ϕ1.
Результаты моделирования представлены на фиг.5-10.
На фиг.5 показаны выходные напряжения U1(t) - кривая 1 и U2(t) - кривая 2 фазовращателей 5 и 6 на промежуточной частоте единичной амплитуды как функции времени, сформированные в соответствии с (4) и (5) с аддитивным нормально распределенным шумом с СКО равным 0,2.
Опорное напряжение с выхода фазовращателя 7 сформировано в соответствии с (6) также единичной амплитуды и с таким же шумом, как и для фазовращателей 5 и 6.
На фиг.6 изображены выходные напряжения фазовых детекторов 8 и 9 после ФНЧ U1 - кривая 1 и U2 - кривая 2. Как видно из рисунка, уровень пересечения напряжений соответствует заданному (m=0,7mmax), равносигнальное направление соответствует θ=10°. Имеет место ложное равносигнальное направление для угла θ=170° в силу превышения сектора сканирования границ однозначности.
На фиг.7 представлены сигналы на выходе устройств вычисления модуля |U∑| - кривая 1 и |UΔ| - кривая 2. Отличия вида этих кривых от рассчитанных (фиг.3) объясняются тем, что для напряжений на фиг.3 значение фазового сдвига |β|=45°.
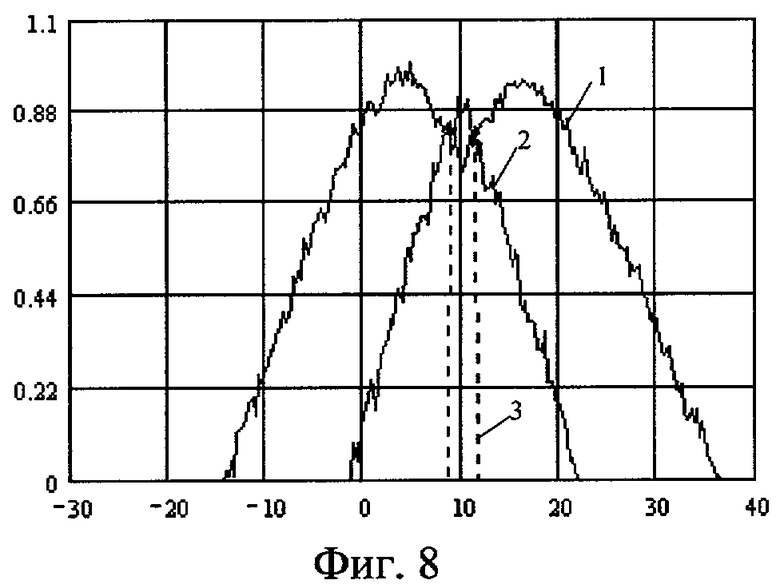
На фиг.8 показаны сигналы объединения на выходе третьего сумматора 17 U∪ - кривая 1, пересечения на выходе вычитающего устройства усилителя 18 U∩ - кривая 2 и пеленгационная характеристика (область отсчета) на выходе компаратора 19 Up - кривая 3. Как видно из рисунка, область отсчета пеленга соответствует положению объекта пеленгации (θ=10°), введенному в (4) и (5).
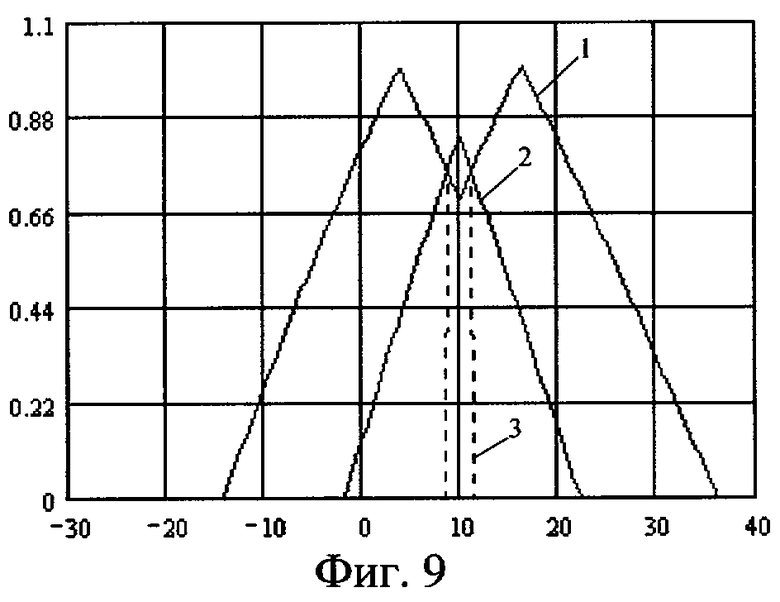
На фиг.9 показаны аналогичные фиг.8 напряжения в отсутствие шумов на входе для сравнения. В обоих случаях результаты идентичны.
На фиг.10 показаны для сравнения полученная для случая θ=10° пеленгационная характеристика 1 и нормированная диаграмма направленности 2 одного антенного элемента в полярной системе координат. В качестве такового использовалась система активный вибратор-рефлектор с расстоянием между ними  , реактивным сопротивлением 30 Ом, модулем отношения токов 0,61 и разностью фаз 122°.
, реактивным сопротивлением 30 Ом, модулем отношения токов 0,61 и разностью фаз 122°.
Относительно выбора коэффициента усиления С результаты моделирования показывают, что для каждого |β| при данном значении отношения сигнал/шум на выходе приемного тракта может быть обеспечено с заданной вероятностью минимальное значение области отсчета пеленга θр. Например, при  и отношении сигнал/шум, равном 5 по напряжению с вероятностью не менее 0,8, обеспечивается значение ширины области отсчета пеленга θр≈1,8° при C=1,1 и θр≈6° при С=1,5. Полученные значения С могут служить для ориентировочной оценки.
и отношении сигнал/шум, равном 5 по напряжению с вероятностью не менее 0,8, обеспечивается значение ширины области отсчета пеленга θр≈1,8° при C=1,1 и θр≈6° при С=1,5. Полученные значения С могут служить для ориентировочной оценки.
Таким образом, результаты моделирования подтверждают работоспособность, эффективность и реализуемость предлагаемого пеленгатора.
Возможность практической реализации также следует из того, что схема может быть построена на типовых, известных и технологически отработанных элементах.
Например:
антенны 1, 2 могут быть выбраны различных типов, в зависимости от диапазона частот и тактико-технических требований к пеленгатору. В простейшем случае могут использоваться несимметричные полуволновые вибраторы или антенны типа вибратор-рефлектор, как в рассматриваемом примере, либо рупорные антенны по типу описанных в [3] с.254, рис.16.4;
приемные тракты 3, 4 могут быть построены по стандартной схеме радиосвязных или радиолокационных приемников с выходом на промежуточной частоте по типу описанной в [4] с.405, рис.14.4;
фазовращатели 5, 6 с фиксированным и фазовращатель 7 с управляемым фазовым сдвигом могут быть выполнены в зависимости от значения рабочей частоты на линиях задержки, RC-цепях, последовательных или параллельных колебательных контурах. На частотах до 30÷40 МГц возможна реализация фазовращателей на основе RC-цепей по типу описанных в [5] с.122-126. На более низких частотах - по типу широкополосного фазовращателя с плавной регулировкой фазового сдвига, приведенного в [6] с.701, рис.XI.II;
фазовые детекторы 8, 9 могут быть реализованы в виде балансных фазовых детекторов, описанных в [4] с.252, рис.9.31в;
ограничители снизу на нулевом уровне 10, 11 могут быть выполнены по простой схеме диодного детектора, приведенного в [5] с.140, рис.5.12;
первый 12, второй 13, третий 17 сумматоры и вычисляющее устройство 16 могут быть выполнены по обычной схеме усилителей на два входа или с прямым и инверсным входами по типу описанных в [7] с.77, рис.3.2;
устройства вычисления модуля 14, 15 могут быть реализованы по схеме двухполупериодного выпрямителя на операционных усилителях по типу приведенной в [8] с.241, рис.12.4;
усилитель 18 может представлять собой обычный резистивно-емкостный видеоусилитель с регулировкой коэффициента усиления в цепи коллектора, приведенный в [4] с.270, рис.10.1;
компаратор 19 может быть реализован на операционном усилителе по типу интегрального компаратора, описанного в [8] с.251, рис.12.22;
ключевая схема 20 может быть выполнена в виде биполярного аналогового ключа по типу приведенного в [9] с.240, рис.6.22.
генератор управляющего напряжения 21 - для формирования управляющего напряжения произвольной формы наиболее универсальной является схема на основе синтезатора, приведенная в [8] с.296, рис.14.10г.
Анализ известных технических решений в области принципов и устройств фазовой пеленгации показывает, что заявленное изобретение благодаря существенным признакам, определившим путь достижения технического результата, не следует для специалиста явным образом из известного уровня техники и соответствует требованию «изобретательский уровень».
Кроме того заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявляемого изобретения. Определение из перечня аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволило выявить в заявляемом объекте существенные по отношению к техническому результату отличительные признаки, что позволяет считать заявленное изобретение удовлетворяющим критерию «новизна».
Источники информации
1. В.А.Чердынцев. Радиотехнические системы. - Минск: «Вышэйшая школа», 1988, - 369 с.
2. Л.С.Беляевский, В.Г.Черкашин. Точность радиоэлектронных измерительных систем. Киев: «Техшка», 1981. - 136 с.
3. Г.З.Айзенберг, В.Г.Ямпольский, О.Н.Терешин. Антенны УКВ.Ч 1. - М.: «Связь», 1977. - 384 с.
4. М.К.Белкин, В.Т.Белинский, Ю.Л.Мазор и др. Справочник по учебному проектированию приемоусилительных устройств. К.: «Выща школа», 1988. - 472 с.
5. А.П.Голубков, А.Д.Далматов, А.П.Лукошкин и др. Проектирование радиолокационных приемных устройств. Под ред. М.А.Соколова. - М.: Высш. шк., 1984, - 335 с.
6. P.M.Терещук, К.М.Терещук, С.А.Седов. Полупроводниковые приемо-усилительные устройства. Справочник радиолюбителя. Киев: Наук. думка, 1987. - 800 с.
7. А.Г.Алексеенко. Применение прецезионных аналоговых интегральных микросхем. - М.: Радио и связь, 1981, 354 с.
8. В.П.Бобровский, В.И.Костенко, В.М.Михайленко и др. Справочник по схемотехнике для радиолюбителя. Под ред. В.П.Боровского. - К: Тэхника, 1989. - 480 с.
9. М.В.Гальперин. Практическая схемотехника в промышленной автоматике. - М.: Энергоатомиздат, 1987. - 320 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| ПЕЛЕНГАТОР | 1990 |
|
RU2006872C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450283C1 |
| РАДИОПЕЛЕНГАТОР | 2004 |
|
RU2262714C1 |
| СПОСОБ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2015 |
|
RU2596018C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| ФАЗОВЫЙ РАДИОПЕЛЕНГАТОР | 2005 |
|
RU2309421C2 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 1991 |
|
RU2007046C1 |
| ФАЗОВЫЙ РАДИОПЕЛЕНГАТОР | 2000 |
|
RU2169377C1 |






Изобретение относится к области радиотехники и может использоваться в радиоразведке, радионавигации и радиолокации для определения направления на источник излучения или отражения радиоволн. Техническим результатом является повышение точности пеленгования и исключение ее зависимости от углового положения объекта пеленгации. Фазовый пеленгатор содержит две антенны, два приемных тракта, три фазовращателя, два фазовых детектора, два ограничителя, три сумматора, два устройства вычисления модуля, вычитающее устройство, усилитель, компаратор, ключевую схему и генератор. 1 з.п. ф-лы, 10 ил.
| ЧЕРДЫНЦЕВ В.А | |||
| Радиотехнические системы | |||
| - Минск: Вышэйшая школа, 1988, с.369 | |||
| Способ однозначного определения пеленга для двухканального радиопеленгатора и устройство для его осуществления | 1983 |
|
SU1108375A1 |
| ФАЗОВЫЙ РАДИОПЕЛЕНГАТОР | 1998 |
|
RU2138061C1 |
| WO 9630779 A, 03.10.1996 | |||
| DE 3234446 A, 05.04.1984 | |||
| US 4380010 A, 12.04.1983. | |||

