Изобретение относится к весоизмерительной технике, в частности к точным устройствам для сортировки мелких предметов неоднородной формы типа кристаллов алмаза по весовым группам.
Известно устройство для сортировки предметов по весу, содержащее измерители массы с электромагнитными системами уравновешивания, загрузочный механизм с манипулятором для поштучной подачи, механизмы сброса в приемные бункеры, установленные на основании, синхронно вращающемся с воронкой загрузочного механизма, блок управления в виде генератора ступенчатого напряжения, соединенного с коммутирующей ячейкой, узлом фиксации прохождения приемных бункеров, системой уравновешивания измерителей масс, которая соединена с управляющим элементом механизма сброса, который соединен с формирователем импульсов, связанным с коммутирующей ячейкой и фотопреобразователем (авт. свид. СССР № 368495, G 01 G 23/26, 1971, Бюл.№ 9).
Известное устройство не может обеспечить требуемую точность и производительность сортировки кристаллов алмазов массой 30-1600 мг.
Известно устройство для автоматической сортировки кристаллов, содержащее узел загрузки кристаллов в виде бункера и трубчатого питателя, узел подачи кристаллов на позицию контроля в виде вращающегося барабана, вибропитателя и вакуум-пинцета, узел нейтрализации электростатических зарядов, датчик массы кристаллов в виде ковша, электромагнита, отсчетного блока, узел контроля сброса кристаллов в виде коромысла с флажком, датчика разбаланса, усилителя, катушки, компенсатора и токовода, исполнительный механизм раскладки кристаллов в виде двигателя, распределителя и накопителя, блок управления из опорного резистора, АЦП, логического устройства и командного блока (авт. свид. СССР № 1804922, В 07 С 5/16, G 01 G 23/26, 1993 г., Бюл. № 12, прототип).
Недостаток известного устройства заключается в том, что оно в силу конструктивного решения не может обеспечить требуемую точность и производительность сортировки кристаллов алмазов по массе от 30 мг до 1600 мг при погрешности разбраковки по массе 0,1 мг.
Технический результат изобретения - повышение точности и производительности.
Достигается технический результат тем, что в устройстве для автоматической сортировки кристаллов, содержащем бункер загрузки кристаллов, узел подачи кристаллов на позицию контроля в виде вибротранспортера с электроприводом, узел определения массы кристаллов в виде ковша, узел контроля сброса кристаллов, исполнительный механизм раскладки кристаллов в виде распределителя и приемных отсеков, блок управления, согласно изобретению, узел подачи кристаллов на позицию контроля выполнен из установленных последовательно вибротранспортера, двухвалкового шнекового транспортера с электроприводом и направляющей трубки; узел определения массы кристаллов выполнен из установленных под направляющей трубкой 4-х секционного загрузочного ковша с электроприводом, на валу которого закреплены храповик и координатный диск, и электронных весов; узел контроля сброса кристаллов выполнен из установленных под 4-х секционным загрузочным ковшом перепускной трубки и 4-х секционного разгрузочного ковша с электроприводом, на валу которого закреплен координатный диск, двух приемных трубок и копилки "нестандартных" кристаллов; исполнительный механизм раскладки кристаллов выполнен в виде установленного под приемной трубкой воронкообразного распределителя с электроприводом, на валу которого закреплен координатный диск, а на корпусе закреплен распределительный диск с радиальными отверстиями 28, которые посредством выводных трубок сочленены с приемными отсеками; блок управления содержит блок регистрации местоположения кристаллов, блок управления электроприводом узла подачи кристаллов на позицию контроля, блок управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов, блок обработки и выдачи команд; при этом блок регистрации местоположения кристаллов содержит первый блок формирования импульсов излучения, датчики регистрации излучения, закрепленные на элементах узла подачи кристаллов на позицию контроля, и блок преобразования сигналов излучения, причем выходы первого блока формирования импульсов излучения соединены с входами датчиков регистрации излучения, выходы которых соединены с первым входом блока преобразования сигналов излучения, второй вход которого соединен с выходом первого блока формирования импульсов излучения, третий вход и выход блока преобразования сигналов излучения соединены, соответственно, с первым выходом и с первым входом блока управления электроприводами узла подачи кристаллов на позицию контроля, второй и третий выходы которого соединены с электроприводами шнекового транспортера и вибротранспортера, а выход электропривода последнего подключен к третьему входу блока управления электроприводами узла подачи кристаллов на позицию контроля; блок управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов содержит датчики контроля положения 4-х секционного загрузочного ковша, 4-х секционного разгрузочного ковша и воронкообразного распределителя, которые установлены с возможностью взаимодействия с координатными дисками узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов, входы которых соединены, соответственно, с первым, вторым и третьим выходами второго блока формирования импульсов излучения, блок контроля положения координатных дисков, первый, второй и третий входы которого соединены, соответственно, с выходами датчиков контроля положения воронкообразного распределителя, 4-х секционного разгрузочного ковша, 4-х секционного загрузочного ковша, и схему управления электроприводами 4-х секционного загрузочного ковша, 4-х секционного разгрузочного ковша и воронкообразного распределителя, первый, второй и третий выходы которой соединены, соответственно, с третьим, вторым и первым выходами блока контроля положения координатных дисков; а блок обработки и выдачи команд содержит дешифратор команд, первый выход которого соединен со вторым входом блока управления электроприводом узла подачи кристаллов на позицию контроля, второй и третий выход которого соединены, соответственно, с четвертым входом блока контроля положения координатных дисков и с четвертым входом схемы управления электроприводами 4-х секционного загрузочного ковша, 4-х секционного разгрузочного ковша и воронкообразного распределителя, контроллер, первый выход которого соединен с входом дешифратора команд, второй выход соединен с входом электронных весов, а третий выход соединен с пятым входом блока контроля положения координатных дисков, первый вход которого соединен с четвертым выходом блока управления электроприводами узла подачи кристаллов на позицию контроля, второй вход его соединен с выходом блока преобразования сигналов излучениия, третий вход соединен с четвертым выходом схемы управления электроприводами 4-х секционного загрузочного ковша, 4-х секционного разгрузочного ковша и воронкообразного распределителя, а четвертый вход соединен с выходом электронных весов.
Транспортирующая поверхность вибротранспортера выполнена V-образной формы и со ступенчатыми перепадами по ходу транспортирования, а поверхность шнекового транспортера выполнена в виде спирали гребенчатой формы.
Координатные диски в узлах определения массы кристалла и контроля сброса кристаллов в исполнительном механизме раскладки выполнены с прорезями и установлены с возможностью прохода через световые каналы датчиков регистрации ИК-излучения.
При проведении сортировки алмазов по весовым группам с высокой точностью и производительностью важным фактором является поштучная подача кристаллов в зону взвешивания и раскладки, быстродействующее и точное средство для взвешивания, автоматическое изменение рабочего состояния транспортной схемы, взвешивающих и раскладывающих на весовые группы средств. Для этих целей предложено новое конструктивное решение транспортной схемы с датчиками контроля местонахождения кристаллов, узлов взвешивания и раскладки кристаллов с датчиками контроля их рабочего положения, а также электронные блоки и связи автоматически связывающие работу всех механических элементов в единое целое в момент определения весовой характеристики каждого кристалла.
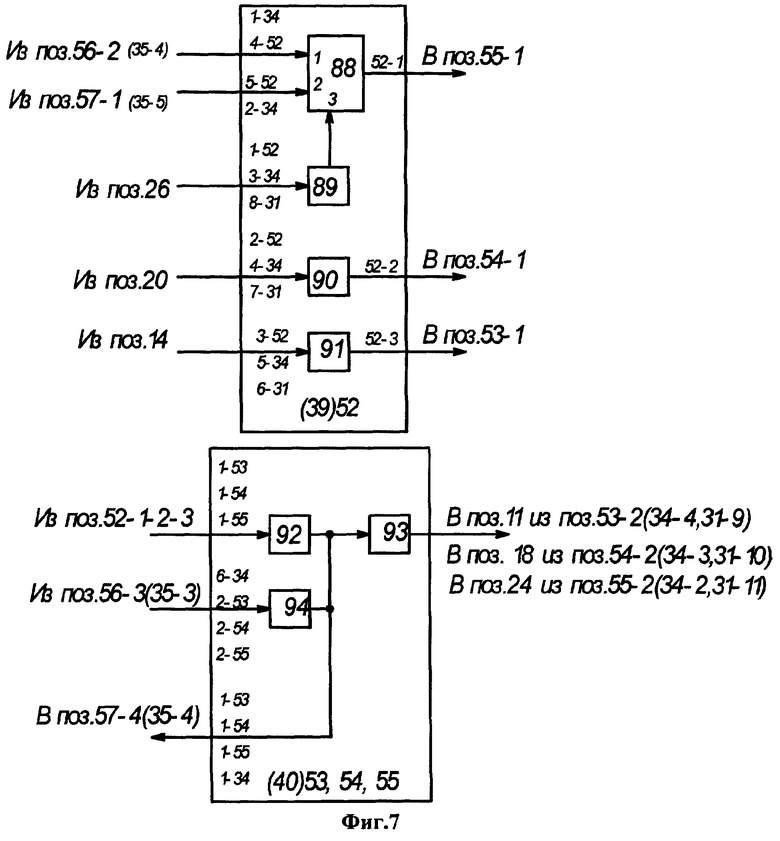
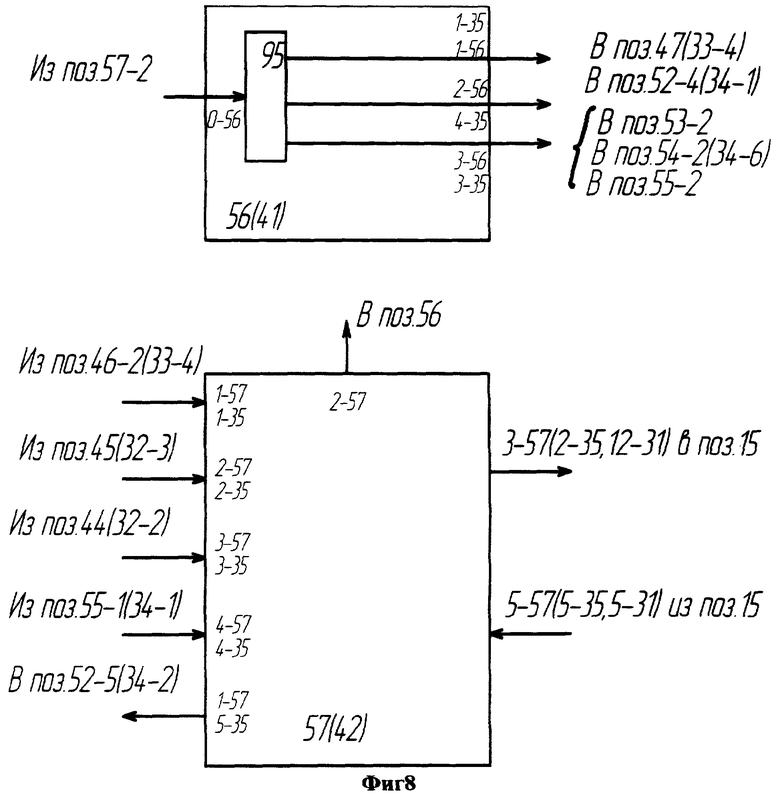
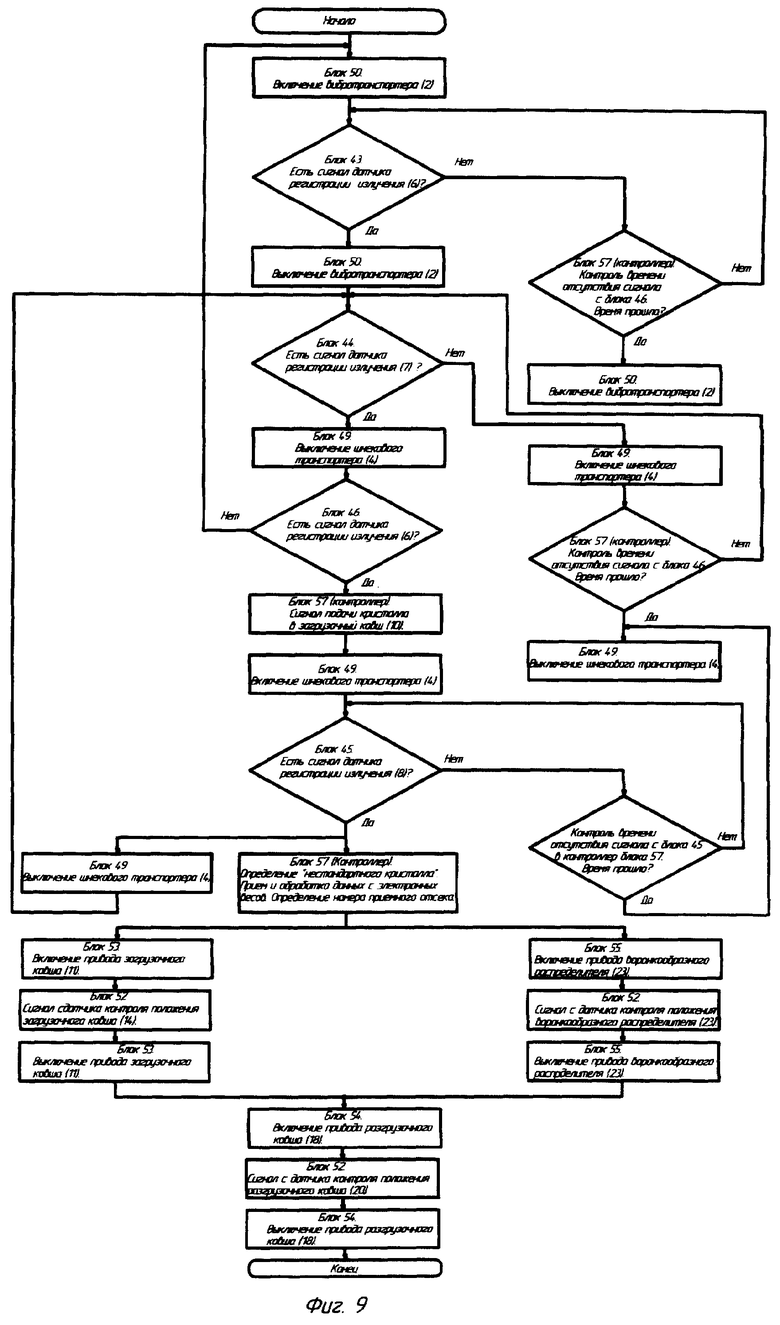
На фиг.1-8 представлена конструктивная схема устройства, где фиг.1 - механическая схема устройства, фиг.2 - принципиальная схема блока управления, фиг.3 - вариант исполнения принципиальной схемы блока управления, фиг.4 - вариант исполнения первого блока формирования импульсов излучения, первого и второго блоков преобразования сигналов излучения (ИК-излучения), на фиг.5 - вариант исполнения третьего блока преобразования сигналов излучения (ИК-излучения) и элементов блока управления электроприводами узла подачи кристаллов на позицию контроля, на фиг.6 - вариант исполнения элементов блока управления электроприводами узла подачи кристаллов на позицию контроля, второго блока формирования импульсов излучения, на фиг.7 - вариант исполнения блока контроля положения координатных дисков и схем управления шаговым электроприводом 4-х секционного загрузочного ковша, шаговым электроприводом 4-х секционного разгрузочного ковша, шаговым электроприводом воронкообразного распределителя, на фиг.8 - вариант исполнения функциональной схемы блока обработки и выдачи команд, на фиг.9 приведен алгоритм работы устройства, представленной на фиг.3-8.
Устройство (фиг.1, 2) содержит бункер 1 загрузки кристаллов, узел подачи кристаллов на позицию контроля в виде установленных последовательно вибротранспортера 2 с электроприводом 3 и двухвалкового шнекового транспортера 4 с шаговым электроприводом 5. Транспортирующая поверхность вибротранспортера 2 выполнена V-образной формы и со ступенчатыми перепадами по ходу движения кристаллов для устранения "сцепления" кристаллов между собой и обеспечения "растяжки" потока кристаллов в поштучную подачу. Спираль шнекового транспортера 4 выполнена гребенчатой формы для обеспечения возможности строго поштучной выдачи кристаллов в зону анализа. Для контроля местоположения кристаллов и поштучной их выдачи с шнекового транспортера 4 установлены датчики 6, 7, 8 регистрации излучения, которые закреплены на элементах шнекового транспортера 4, а именно, первый датчик 6 - в зоне схода кристаллов с вибротранспортера 2, второй датчик 7 - в зоне разгрузочного конца шнекового транспортера 4, третий датчик 8 - в зоне "схода" кристалла с шнекового транспортера 4.
Узел определения массы кристаллов, который включает установленную под разгрузочным концом шнекового транспортера 4 направляющую трубку 9, разгрузочный конец которой размещен над 4-х секционным загрузочным ковшом 10, под которым установлены электронные весы 15 (например, типа CB1503DR фирмы "METTLER TOLEDO"). Четырех секционный загрузочный ковш 10 снабжен шаговым электроприводом 11, на валу которого закреплены координатный диск 12 с прорезями и храповик 13 с возможностью взаимодействия с 4-х секционным загрузочным ковшом 10. На координатном диске 12 закреплен датчик 14 контроля положения 4-х секционного загрузочного ковша 10.
Узел контроля сброса кристаллов, включающий перепускную трубку 16, которая установлена рядом с электронными весами 15. Загрузочный конец перепускной трубки 16 размещен под 4-х секционным загрузочным ковшом 10, а ее разгрузочный конец расположен над 4-х секционным разгрузочным ковшом 17, снабженным шаговым электроприводом 18. На валу шагового электропривода 18 закреплен координатный диск 19 с прорезями, на котором закреплен датчик 20 контроля положения 4-х секционного разгрузочного ковша 17. Под 4-х секционным разгрузочным ковшом 17 установлены две приемные трубки 21, под одной из которых размещена копилка 22 "нестандартных" кристаллов.
Исполнительный механизм раскладки кристаллов выполнен из воронкообразного распределителя 23, установленного под второй приемной трубкой 21 и снабженного шаговым электроприводом 24. Над загрузочным концом воронкообразного распределителя 23 размещен координатный диск 25 с прорезями, на котором закреплен датчик 26 контроля положения воронкообразного распределителя 23. Координатный диск 25 закреплен на валу шагового электропривода 24, на корпусе которого закреплен распределительный диск 27 с радиальными отверстиями 28, размещенный с зазором под разгрузочным концом воронкообразного распределителя 23 и над выводными трубками 29, под которыми установлены приемные отсеки 30.
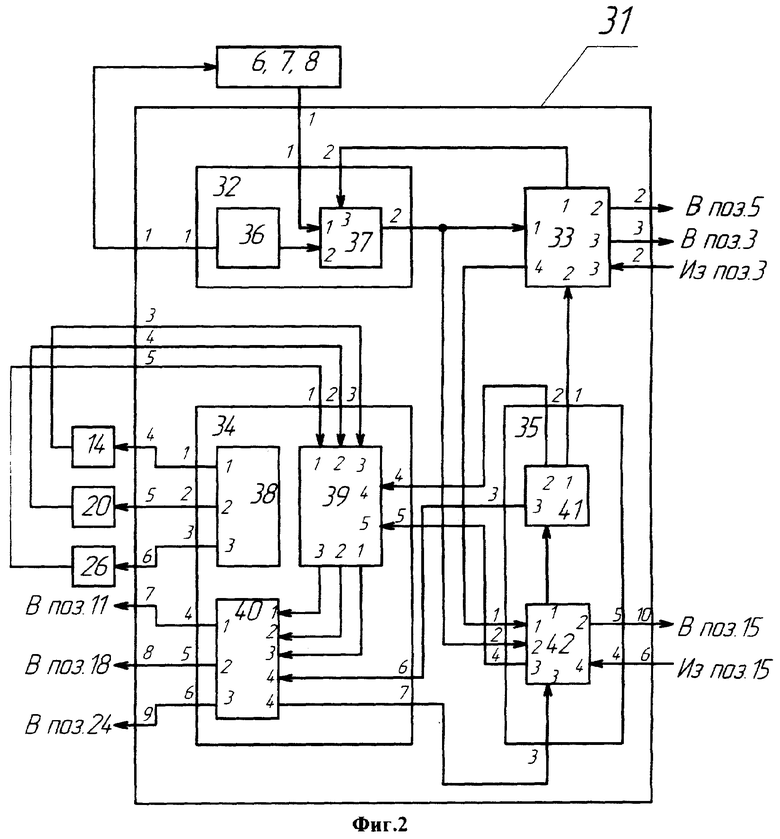
Блок управления 31 (фиг.2) включает блок регистрации 32 местоположения кристаллов, блок управления электроприводами 33 узла подачи кристаллов на позицию контроля, блок управления электроприводами 34 узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов, блок обработки и выдачи команд 35.
Блок регистрации 32 местоположения кристаллов содержит первый блок формирования импульсов излучения 36, блок преобразования сигналов 37 излучения и датчики 6, 7, 8 регистрации излучения. Выход первого блока формирования импульсов излучения 36 (первый выход блока управления 31 и первый выход блока регистрации местоположения кристаллов 32) соединен с входом датчиков 6, 7, 8 регистрации излучения, выход которых соединен с первым входом блока преобразования сигналов излучения 37 (первый вход блока управления 31 и первый вход блока регистрации местоположения кристаллов 32). Второй вход блока преобразования сигналов излучения 37 соединен с выходом первого блока формирования импульсов излучения 36, третий его вход (второй вход блока регистрации местоположения кристаллов 32) и выход (второй выход блока регистрации местоположения кристаллов 32) соединены соответственно с первым выходом и с первым входом блока управления электроприводами узла подачи кристаллов на позицию контроля 33. Второй выход (второй выход блока управления 31) и третий выход блока управления электроприводами узла подачи кристаллов на позицию контроля 33 (третий выход блока управления 31) соединены соответственно с электроприводами 3, 4 вибротранспортера 2 и шнекового транспортера 4. Выход электропривода 3 вибротранспортера 2 подключен к третьему входу (второй вход блока управления 31) блока управления электроприводами узла подачи кристаллов на позицию контроля 33.
Блок управления электроприводами 34 узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов содержит датчик контроля положения 14 4-х секционного загрузочного ковша 10, датчик контроля положения 20 4-х секционного разгрузочного ковша 17, датчик контроля положения 26 воронкообразного распределителя 23, второй блок формирования импульсов излучения 38, блок контроля положения 39 координатных дисков 12, 19, 25, схему управления 40 шаговыми электроприводами 11, 18, 24 четырех секционного загрузочного 10 и разгрузочного 17 ковша и воронкообразного распределителя 23. Входы датчиков контроля положения 14, 20, 26 соединены соответственно с первым, вторым и третьим выходами второго блока формирования импульсов излучения 38 (первый, второй и третий выход блока управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов 34 и четвертый, пятый, шестой выход блока управления 31). Блок контроля положения 39 координатных дисков 12, 19, 25 первым, вторым и третьим входами (первый, второй, третий входы блок контроля положения 39 координатных дисков 12, 19, 25 и третий, четвертый, пятый входы блока управления 31) соединен соответственно с выходами датчика контроля положения 26 воронкообразного распределителя 23, датчика контроля положения 20 4-х секционного разгрузочного ковша 17, датчика контроля положения 14 4-х секционного загрузочного ковша 10. Схема управления 40 электроприводами 11, 18, 24 четырех секционного загрузочного ковша 10, четырех секционного разгрузочного ковша 17 и воронкообразного распределителя 23 первым, вторым и третьим выходами (четвертый, пятый, шестой выходы блока управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов 34 и седьмой, восьмой, девятый выходы блока управления 31) соединена соответственно с электроприводами 11, 18, 24 четырех секционного загрузочного 10 и разгрузочного 17 ковша, и воронкообразного распределителя 23. Первый, второй и третий входы схемы управления 40 соединены соответственно с третьим, вторым и первым выходами блока контроля положения 39 координатных дисков 14, 20, 26.
Блок обработки и выдачи команд 35 содержит дешифратор команд 41 и контроллер 42. Первый выход дешифратора команд 41 (первый выход блока обработки и выдачи команд 35) соединен с вторым входом блока управления электроприводами узла подачи кристаллов на позицию контроля 33, второй и третий его выход (второй и третий выход блока обработки и выдачи команд 35) соединены соответственно с четвертым входом блока контроля положения 39 координатных дисков 12, 19, 25 (четвертый вход блока управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов 34) и с четвертым входом схемы управления 40 электроприводами 11, 18, 24 четырех секционного загрузочного 10 и разгрузочного 17 ковша, и воронкообразного распределителя 23. Контроллер 42 первым выходом соединен с входом дешифратора команд 41, вторым выходом (пятый выход блока обработки и выдачи команд 35 и десятый выход блока управления 31) соединен с входом электронных весов 15, третьим выходом (четвертый выход блока обработки и выдачи команд 35) соединен с пятым входом блока контроля положения 39 координатных дисков 12, 19, 25 (пятый вход блока управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов 34). Первый вход контроллера 42 (первый вход блока обработки и выдачи команд 35) соединен с четвертым выходом блока управления электроприводами узла подачи кристаллов на позицию контроля 33, второй его вход (второй вход блока обработки и выдачи команд 35) соединен с выходом блока преобразования сигналов 37 излучения (второй выход блока регистрации местоположения кристаллов 32), третий его вход (третий вход блока обработки и выдачи команд 35) соединен с четвертым выходом схемы управления 40 электроприводами 11, 18, 24 четырех секционного загрузочного 10 и разгрузочного 17 ковша, и воронкообразного распределителя 23 (седьмой выход блока управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов 34), четвертый его вход (четвертый вход блока обработки и выдачи команд 35 и шестой вход блока управления 31) соединен с выходом электронных весов 15.
Контроллер 42 работает по заложенной в него программе и выполняет следующие функции: считывание данных с электронных весов 15 и обработку этих данных по определенному алгоритму, увеличивающему производительность устройства в целом; тарировку электронных весов 15; контроль и установку временных параметров; задание установки положения воронкообразного распределителя 23; определение по сигналу с блока 45 "нестандартного" кристалла и направление вращения разгрузочного ковша 17; формирование сигнала на подачу кристалла в загрузочный ковш 10; тестирование отдельных узлов устройства и вывод режима работы на внутренний дисплей.
Контроллер 42 использует для своей работы сигналы с блока преобразования сигналов излучения 37 датчиков 6, 7, 8 для контроля работы вибротранспортера 2 и шнекового транспортера 4, регистрации подачи кристаллов на электронные весы 15. С схемы управления 40 электроприводами 11, 18, 24 на контроллер 42 поступают сигналы, определяющие готовность узлов устройства к работе. Контроллер 42 выдает сигналы на блок 39, которые определяют работу воронкообразного распределителя 23. Сигналы, поступающие на дешифратор команд 41 контроллера 42, определяют работу электроприводов 3, 5 и электроприводов 11, 18, 24.
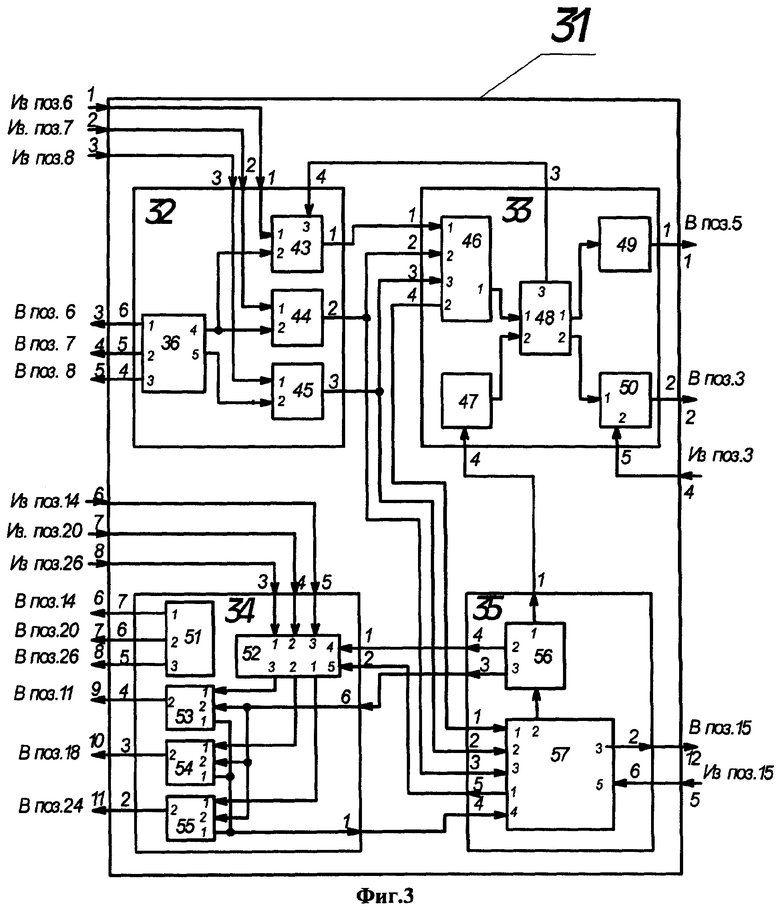
Вариант исполнения блока управления 31 приведен на фиг.3-8.
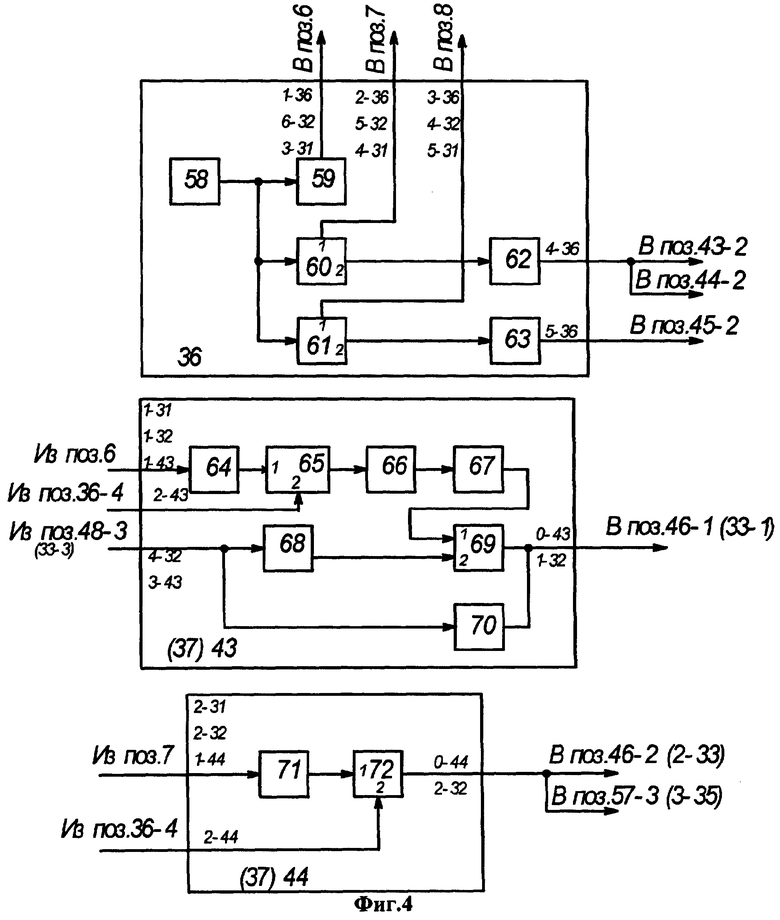
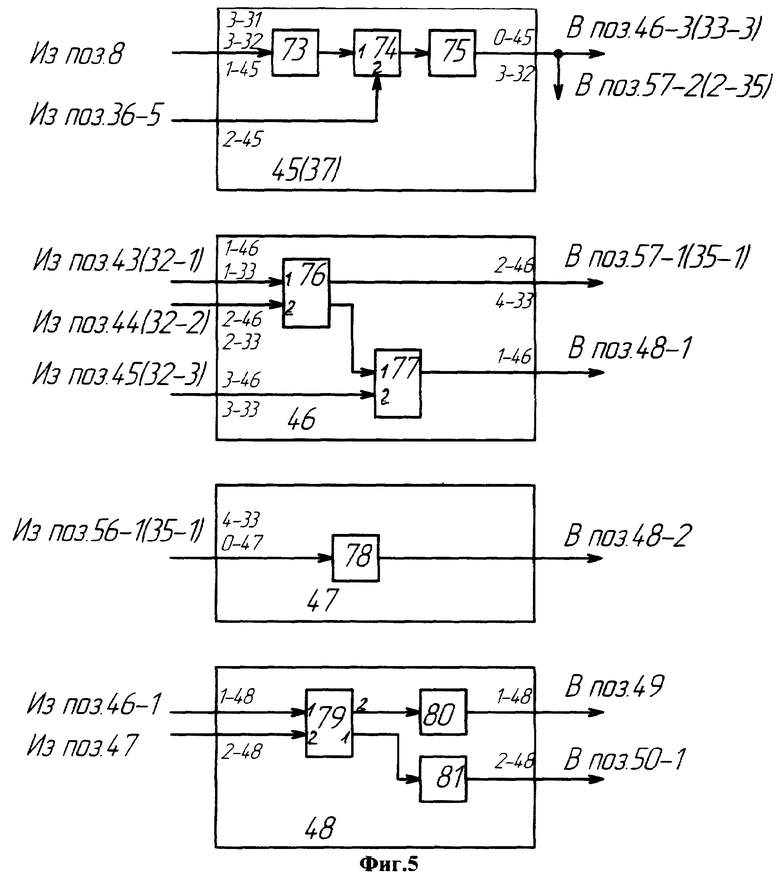
Блок регистрации местоположения кристаллов 32 содержит первый блок формирования импульсов излучения 36 (фиг.4), блок преобразования сигналов 37 излучения в виде трех блоков преобразования ИК-излучения 43, 44, 45 (фиг.3, 4, 5) и три фотоэлектронных датчика 6, 7, 8 регистрации ИК-излучения. Первый блок формирования импульсов излучения 36 первым, вторым, третьим выходом (шестой, пятый, четвертый выход блока регистрации местоположения кристаллов 32 и третий, четвертый, пятый выход блока управления 31) соединен соответственно с входом первого, второго и третьего фотоэлектронных датчиков 6, 7, 8 регистрации ИК-излучения, выходы которых (первый, второй, третий входы блока регистрации местоположения кристаллов 32 и блока управления 31) соединены соответственно с первыми входами первого, второго, третьего блоков преобразования ИК-излучения 43, 44,45. Вторые входы первого и второго блоков преобразования ИК-излучения 43, 44, соединены с четвертым выходом первого блока формирования импульсов излучения 36, второй вход третьего блока преобразования ИК-излучения 45 соединен с пятым выходом первого блока формирования импульсов излучения 36. Первый блок формирования импульсов излучения 36 выполнен на микросхемах серии К561 и содержит генератор импульсов 58, три формирователя импульсов 59 (первый выход первого блока формирования импульсов излучения 36), 60, 61, два формирователя синхроимпульсов 62, 63 (соответственно четвертый и пятый выход первого блока формирования импульсов излучения). Первый блок 43 преобразования ИК-излучения (фиг.4) содержит усилитель 64, который является его первым входом (К544УД1), формирователь сигнала 65, который является его вторым входом (К561.КР140УД8), детектор 66 (К140УД20), компаратор 67 (К140УД8), имитатор сигнала 68 местоположения кристалла на "сходе" с вибротранспортера 2 (К156АГ), сумматор 69 (К561), который является его выходом, имитатор сигнала 70 (К561) местоположения кристалла на "сходе" с шнекового транспортера 4, который является его третьим входом. Второй блок 44 преобразования ИК-излучения (фиг.4) содержит усилитель 71 (К140УД7), который является его первым входом, формирователь сигнала 72 (К561), который является его вторым входом и выходом. Третий блок 45 преобразования ИК-излучения (фиг.5) содержит усилитель 73 (УД140), который является его первым входом, формирователь сигнала 74 (К561), который является его вторым входом, узел определения двойного сигнала 75 (К561), который является его выходом.
Блока управления 33 электроприводами узла подачи кристалла на позицию контроля (фиг.3, 5, 6) содержит первую схему согласования 46, вторую схему согласования 47, преобразователь сигналов 48, первую схему управления 49 электроприводом, вторую схему управления 50 электроприводом. Первый, второй, третий входы первой схемы 46 согласования (первый, второй, третий входы блока управления электроприводами узла подачи кристаллов на позицию контроля 33) соединены соответственно с выходом первого блока преобразования сигналов 43 ИК-излучения (первый выход блока регистрации местоположения кристаллов 32), с выходом второго блока преобразования сигналов 44 ИК-излучения (второй выход блока регистрации местоположения кристаллов 32), с выходом третьего блока преобразования сигналов 45 ИК-излучения (третий выход блока регистрации местоположения кристаллов 32). Первый выход первой схемы согласования 46 и выход второй схемы согласования 47 соединены соответственно с первым и вторым входами преобразователя сигналов 48. Первый, второй выход преобразователя сигналов 48 соединен соответственно с входом первой схемы управления 49 электроприводом и с первым входом второй схемы управления 50 электроприводом, третий выход преобразователя сигналов 48 (третий выход блока управления электроприводами узла подачи кристаллов на позицию контроля 33) соединен с третьим входом первого блока преобразования 43 сигналов ИК-излучения (четвертый вход блока регистрации местоположения кристаллов 32). Выход первой схемы управления 49 электроприводом (первый выход блока управления электроприводами узла подачи кристаллов на позицию контроля 33 и первый выход блока управления 31) соединен с шаговым электроприводом 5 шнекового транспортера 4, выход второй схемы управления 50 электроприводом (второй выход блока управления электроприводами узла подачи кристаллов на позицию контроля 33 и второй выход блока управления 31) соединен с входом электропривода 3 вибротранспортера 2, выход электропривода последнего соединен с вторым входом второй схемы управления 50 электроприводом (четвертый вход блока управления 31 и пятый вход блока управления электроприводами узла подачи кристаллов на позицию контроля 33). Первая схема согласования 46 (фиг.5) выполнена на микросхемах К561 и содержит схему фиксации 76 сигналов местоположения кристаллов (является ее первым и вторым входом и вторым выходом) и узел 77 выбора режима коммутации (является ее третьим входом и первым выходом). Вторая схема согласования 47 (фиг.5) содержит схему фиксации 78 команд контроллера 57, выполнена на микросхеме К561 (является входом и выходом схемы 47). Преобразователь сигналов 48 (фиг.5) содержит коммутатор сигналов 79 управления (микросхема К561), является первым и вторым его входами, два буферных 80, 81 усилителя (транзистор КТ3102), являются соответственно первым и вторым его выходами. Первая схема управления 49 электроприводом (фиг.6) содержит узел приема сигналов 82 (микросхема К561), является ее входом, и формирователь напряжения питания 83 (транзисторы КТ829) шагового электропривода 5 шнекового транспортера 4, является ее выходом. Вторая схема управления 50 электроприводом (фиг.6) содержит генератор синуса 84, усилитель мощности 85 (микросхема К 140, транзисторы КТ816, КТ817), является ее выходом, и систему автоматического регулирования 86 (микросхема К140), является ее первым и вторым входами.
Блок 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов (фиг.3, 6, 7) содержит фотоэлектронный датчик контроля 14 положения 4-х секционного загрузочного 10 ковша, фотоэлектронный датчик контроля 20 положения 4-х секционного разгрузочного 17 ковша, фотоэлектронный датчик контроля 26 положения воронкообразного распределителя 23, которые закреплены соответственно на координатных дисках 12, 19, 25 узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов, второй блок формирования импульсов излучения 51, блок контроля положения 52 координатных дисков 12, 19, 25, схему управления 53 шаговым электроприводом 11 четырех секционного загрузочного 10 ковша, схему управления 53 шаговым электроприводом 18 четырех секционного разгрузочного 17 ковша, схему управления 54 шаговым электроприводом 24 воронкообразного распределителя 23. Выходы фотоэлектронных датчиков контроля 14, 20, 26 положения (соответственно шестой, седьмой, восьмой входы блока управления 31 и пятый, четвертый, третий входы блока управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов 34) соединены соответственно с третьим, вторым, первым входами блока контроля положения 52 координатных дисков 12, 19, 25, а входы соединены соответственно с первым, вторым, третьим выходами второго блока формирования импульсов 51 излучения (седьмой, шестой, пятый выходы блока управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов 34 и шестой, седьмой, восьмой выходы блока управления 31). Первый вход схемы управления 53 шаговым электроприводом 11 4-х секционного загрузочного 10 ковша, схемы управления 54 шаговым электроприводом 18 4-х секционного разгрузочного 17 ковша, схемы управления 55 шаговым электроприводом 24 воронкообразного распределителя 23 соединены соответственно с третьим, вторым, первым выходами блока управления электроприводами 34 узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов, а их вторые выходы (соответственно четвертый, третий, второй выходы блока управления 34 электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов и девятый, десятый, одиннадцатый выходы блока управления 31) соединены соответственно с шаговым электроприводом 11, 18, 24 4-х секционного загрузочного 10 ковша, 4-х секционного разгрузочного 17 ковша, воронкообразного распределителя 23. Второй блок формирования импульсов 51 излучения (фиг.6) выполнен на токоограничивающих резисторах, является его первым, вторым и третьим выходом. Блок контроля положения 52 (фиг.7) выполнен на микросхемах серии К561 и содержит формирователь сигнала отключения 88 схемы управления 55 шаговым электроприводом 24 воронкообразного распределителя 23 (является его четвертым и пятым входом и первым выходом), схему согласования 89 с фотоэлектронным датчиком контроля 26 положения воронкообразного распределителя 23 (является его первым входом), формирователь сигнала отключения 90 схемы управления 54 шаговым электроприводом 18 4-х секционного разгрузочного 17 ковша (является его вторым входом), формирователь сигнала отключения 91 схемы управления 53 шаговым электроприводом 11 4-х секционного загрузочного 10 ковша (является его третьим входом). Схемы управления электроприводами 53, 54, 55 (фиг.7) выполнены на микросхемах серии К561 и каждая содержит узел приема сигнала 92 (является их первым входом), формирователь напряжения питания 93 шаговых электроприводов 11, 18, 24 (является их выходом), узел приема сигнала 94 с контроллера 57 (является их вторым входом и первым выходом).
Блок обработки и выдачи команд 35 (фиг.3, 8) содержит дешифратор команд 56 (микросхема К561) и контроллер 57 (марки 5082). Вход дешифратора команд 56 соединен с вторым выходом контроллера 57. Первый выход дешифратора команд 56 (первый выход блока обработки и выдачи команд 35) соединен с входом второй схемы согласования 47 (четвертый вход блока управления электроприводами узла подачи кристаллов на позицию контроля 33), второй выход (четвертый выход блока обработки и выдачи команд 35) соединен с четвертым входом блока контроля положения 52 координатных дисков 12, 19, 25 4-х секционного загрузочного 10 ковша, 4-х секционного разгрузочного 17 ковша, воронкообразного распределителя 23 (первый вход блока управления 34 электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов), третий выход (третий выход блока обработки и выдачи команд 35) соединен с вторым входом схемы управления 53 шаговым электроприводом 11 4-х секционного загрузочного 10 ковша, схемы управления 54 шаговым электроприводом 18 4-х секционного разгрузочного 17 ковша, схемы управления 55 шаговым электроприводом 24 воронкообразного распределителя 23 (шестой вход блока управления 34 электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов). Контроллер 57 первым, вторым, третьим входами (первый, второй, третий вход блока обработки и выдачи команд 35) соединен соответственно с вторым выходом первой схемы согласования 46 (четвертый выход блока управления электроприводами узла подачи кристаллов на позицию контроля 33), с выходом третьего блока преобразования сигналов 45 (третий выход блока регистрации местоположения кристаллов 32), с выходом второго блока преобразования сигналов 44 (второй выход блока регистрации местоположения кристаллов 32), четвертый вход (пятый вход блока обработки и выдачи команд 35) соединен с первым выходом схемы управления 53 шаговым электроприводом 11 4-х секционного загрузочного 10 ковша, схемы управления 54 шаговым электроприводом 18 4-х секционного разгрузочного 17 ковша, схемы управления 55 шаговым электроприводом 24 воронкообразного распределителя 23 (первый выход блока обработки и выдачи команд 35). Пятый вход контроллера 57 (шестой вход блока обработки и выдачи команд 35 и пятый вход блока управления 31) соединен с выходом электронных весов 15, первый выход (четвертый выход блока обработки и выдачи команд 35) соединен с пятым входом блока контроля положения 52 координатных дисков 12, 19, 25 4-х секционного загрузочного 10 ковша, 4-х секционного разгрузочного 17 ковша, воронкообразного распределителя 23 (второй вход блока управления 34 электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов), третий выход (второй выход блока обработки и выдачи команд 35 и двенадцатый выход блока управления 31) соединен с входом электронных весов 15.
Устройство (фиг.1-2) работает следующим образом. Кристалл с бункера загрузки кристаллов 1 попадает на вибротранспортер 2, который приводится в действие подачей питающего напряжения с третьего выхода блока управления 33 электроприводами узла подачи кристаллов на позицию контроля (третий выход блока управления 31). При этом включение вибротранспортера 2 произойдет при условии отсутствия сигнала блокировки на первом входе блока управления 33 электроприводами узла подачи кристалла на позицию контроля и наличия сигнала на включение вибротранспортера 2 на его втором входе (первый выход блока 35 обработки и выдачи команд - первый выход дешифратора команд 41, первый выход 42 контроллера). Производительность вибротранспортера 2 поддерживается на определенном уровне сигналами, поступающими с электропривода 3 вибротранспортера 2 на третий вход блока управления 33 электроприводами узла подачи кристалла на позицию контроля (второй вход блока управления 31). Кристалл, перемещаясь вдоль вибротранспортера 2, попадает на шнековый транспортер 4, где регистрируется датчиком 6 регистрации излучения, сигнал с которого поступает на первый вход блока преобразования сигналов 37 излучения (первый вход блока 32 регистрации местоположения кристаллов - первый вход блока управления 31). С выхода блока преобразования сигналов 37 излучения (второй выход блока 32 регистрации местоположения кристаллов) сигнал проходит на первый вход блока управления 33 электроприводами узла подачи кристалла на позицию контроля и блокирует подачу питающего напряжения на вибротранспортер 2 через третий выход блока управления 33 электроприводами узла подачи кристалла на позицию контроля (третий выход блока управления 31). Вибротранспортер 2 останавливается (тем самым предупреждается завал шнекового транспортера 4), а шнековый транспортер 4 включается. Кристалл по шнековому транспортеру 4 перемещается до зоны регистрации датчика 7 регистрации излучения, сигнал с которого поступает на первый вход блока преобразования сигналов 37 излучения (первый вход блока 32 - первый вход блока управления 31), затем на первый вход блока управления 33 электроприводами узла подачи кристалла на позицию контроля и блокирует работу шнекового транспортера 4 через второй выход блока управления 33 электроприводами узла подачи кристалла на позицию контроля (второй выход блока управления 31), т.е. шнековый транспортер 4 останавливается. Транспортная система готова подать материал на электронные весы 15 и подает сигнал с четвертого выхода блока 33 управления электроприводами узла подачи кристалла на позицию контроля на первый вход контроллера 42 (первый вход блока 35 обработки и выдачи команд), далее сигнал с первого выхода контроллера 42 поступает на вход дешифратора команд 41, с первого выхода которого (первый выход блока 35 обработки и выдачи команд) поступает на второй вход блока 33 управления электроприводами узла подачи кристалла на позицию контроля и включает шнековый транспортер 4 через второй выход блока 33 управления электроприводами узла подачи кристалла на позицию контроля (второй выход блока управления 31). Кристалл "срывается" с шнекового транспортера 4 и "пролетает" через зону регистрации датчика 8 регистрации излучения. Сигнал с последнего поступает на первый вход блока преобразования сигналов 37 излучения (первый вход блока 32 регистрации местоположения кристаллов - первый вход блока управления 31) и далее на второй вход контроллера 42 (второй вход блока 35 обработки и выдачи команд). По этому сигналу контроллер 42 определяет момент начала процесса взвешивания и один из признаков возможно «нестандартного» кристалла. Кристалл по направляющей трубе 9 попадает в 4-х секционный загрузочный ковш 10, установленный на электронных весах 15. Данные о показании веса кристалла поступают на четвертый вход контроллера 42 (четвертый вход блока 35 обработки и выдачи команд - шестой вход блока управления 31). В контроллере 42 определяется номер приемного отсека 30, куда должен быть отправлен взвешиваемый кристалл, и сигнал с третьего выхода контроллера 42 (четвертый выход блока 35 обработки и выдачи команд) поступает на пятый вход блока 39 контроля положения координатных дисков 12, 19, 25 4-х секционных загрузочного 10 и разгрузочного 17 ковшов, воронкообразного распределителя 23 (пятый вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов). По сигналу, пришедшему с первого выхода контроллера 42 на вход дешифратора команд 41 и вышедшего с второго выхода дешифратора команд 41 (второй выход блока 35 обработки и выдачи команд) на четвертый вход блока 39 контроля положения координатных дисков 12, 19, 25 4-х секционных загрузочного 10 и разгрузочного 17 ковшов, воронкообразного распределителя 23 (четвертый вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов) запускается поиск установленного в блоке 39 контроля положения координатных дисков 12, 19, 25 4-х секционных загрузочного 10 и разгрузочного 17 ковшов, воронкообразного распределителя 23 номера приемного отсека 30. С третьего выхода дешифратора команд 41 (третий выход блока 35 обработки и выдачи команд) на четвертый вход схемы 40 управления элетроприводами 11, 18, 24 (шестой вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов) поступает сигнал включения шагового 11 электропривода 4-х секционного загрузочного ковша 10. Храповик 13 входит в зацепление с 4-х секционным загрузочным ковшом 10 и поворачивает его вокруг оси, кристалл через перепускную трубку 16 попадает в 4-х секционный разгрузочный ковш 17. При повороте координатного диска 12 на угол, соответствующий принятию 4-х секционным загрузочным ковшом 10 конечного положения, сигнал с первого выхода второго блока формирования импульсов 38 излучения (первый выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - четвертый выход блока управления 31) поступает на датчик 14 контроля положения и далее поступает на третий вход блока 39 контроля положения координатных дисков 12, 19, 25 (третий вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - третий вход блока управления 31). Сигнал отключения с третьего выхода блока 39 контроля положения координатных дисков 12, 19, 25 поступает на первый вход схемы 40 управления электроприводами 11, 18, 24 и далее с ее первого выхода (четвертый выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - седьмой выход блока управления 31) передается на электропривод 11 4-х секционного загрузочного ковша 10. Сигнал, приводящий в действие электропривод 24 воронкообразного распределителя 23, приходит с третьего выхода схемы 40 управления электроприводами 11, 18, 24 (шестой выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - девятый выход блока управления 31). Формируется этот сигнал в дешифраторе команд 41 и с второго выхода дешифратора команд 41 (второй выход блока 35 обработки и выдачи команд) проходит на четвертый вход блока 39 контроля положения координатных дисков 12, 19, 25 (четвертый вход блока 34) и далее с его второго выхода проходит на второй вход схемы 40 управления электроприводами 11, 18, 24, а с третьего выхода дешифратора команд 41 (третий выход блока 35 обработки и выдачи команд) сигнал проходит на четвертый вход схемы 40 управления электроприводами 11, 18, 24 (шестой вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов). При движении воронкообразного распределителя 23 с координатным диском 25, с третьего выхода второго блока 38 формирования импульсов излучения (третий выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - шестой выход блока 31 управления) формируется сигнал, который поступает на датчик 26 контроля положения воронкообразного распределителя 23.
Сигнал с последнего, несущий информацию о номере приемного отсека 30, далее поступает на первый вход блока 39 контроля положения координатных дисков 12, 19, 25 (первый вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - пятый вход блока 31 управления). При совпадении заданного контроллером 42 номера приемного отсека 30 с номером приемного отсека, регистрируемого датчиком 26 контроля положения воронкообразного распределителя 23, на первом выходе блока 39 контроля положения координатных дисков 12, 19, 25 появляется сигнал, который передается на третий вход схемы 40 управления электроприводами 11, 18, 24 и далее на ее третий выход (шестой выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов, девятый выход блока 31 управления) на отключение электропривода 24 воронкообразного распределителя 23. На четвертый вход схемы 40 управления электроприводами 11, 18, 24 (шестой вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов) поступает сигнал с третьего выхода дешифратора команд 41 (третий выход блока 35 обработки и выдачи команд), затем этот сигнал с второго выхода схемы 40 управления электроприводами 11, 18, 24 (пятый выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - восьмой выход блока 31 управления) поступает на включение электропривода 18 4-х секционного разгрузочного 17 ковша. Координатный диск 19 поворачивает 4-х секционный разгрузочный 17 ковш вокруг своей оси и занимает конечное положение. Во втором блоке 38 формирования импульсов излучения формируется сигнал, который с его второго выхода (второй выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - пятый выход блока 31 управления) передается на датчик 20 контроля положения 4-х секционного разгрузочного 17 ковша, а с последнего - на второй вход блока 39 контроля положения координатных дисков 12, 19, 25 (второй вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - четвертый вход блока 31 управления), который формирует сигнал остановки, поступающий с второго выхода блока 39 контроля положения координатных дисков 12, 19, 25 на второй вход схемы 40 управления электроприводами 11, 18, 24 и далее с второго ее выхода (пятый выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов - восьмой выход блока 31 управления) на остановку электропривода 18 4-х секционного разгрузочного ковша 17. "Нестандартный" кристалл проходит по приемной трубке 21 в копилку 22, а другие кристаллы по второй приемной трубке 21 поступают в воронкообразный распределитель 23 и далее через радиальное отверстие 28 в распределительном диске 27 попадают в выводную трубку 29 и поступают в приемный отсек 30.
С четвертого, пятого, шестого выхода блока 31 (фиг.2) поступает питающее напряжение на излучатели датчиков 14, 20, 26, а с первого выхода блока 31 поступает импульсное напряжение на излучатели датчиков 6, 7, 8.
Программа контроллера 42 работает следующим образом. В начале тестируется работа отдельных узлов устройства, проводится тарировка электронных весов 15. Проверяется готовность подачи кристаллов вибротранспортером 2 и шнековым транспортером 4, если они готовы подать кристалл, выдается сигнал на подачу кристалла в загрузочный ковш 10. Контролируется время с момента подачи сигнала на загрузку ковша 10 до момента регистрации кристалла датчиком регистрации излучения 8. Если не превышается заданное программой время, то считываются данные с электронных весов 15. После обработки данных с электронных весов 15 устанавливается сигнал на включение электропривода 11 загрузочного ковша 10 и при необходимости сигнал на включение электропривода 24 воронкообразного распределителя 23. Контроллер 42 подает сигнал на подачу очередного кристалла и цикл работы устройства для автоматической сортировки кристаллов по весу повторяется.
Устройство в варианте конкретного исполнения (фиг.3-8) работает следующим образом.
Кристалл с бункера загрузки кристаллов 1 попадает на вибротранспортер 2, который приводится в действие подачей питающего напряжения с выхода усилителя мощности 85 второй схемы управления 50 электроприводом 3 (второй выход блока управления электроприводами узла подачи кристаллов на позицию контроля 33, второй выход блока 31 управления). На усилитель мощности 85 поступает сигнал с генератора синуса 84. При этом включение вибропитателя 2 произойдет при наличии сигнала включения на первом входе второй схемы управления 50 электроприводом 3 (первый вход системы автоматического регулирования 86). Сигнал включения вибротранспортера 2 поступает с коммутатора сигналов управления 79 (преобразователь сигналов 48 блока управления электроприводами узла подачи кристаллов на позицию контроля 33) через буферный усилитель 81 на первый вход второй схемы управления 50 электроприводом 3. Сигнал включения вибротранспортера 2 формируется в коммутаторе сигналов управления 79 при условии отсутствия сигнала блокировки на первом входе преобразователя сигналов 48 и наличии сигнала на включение на его втором входе (четвертый вход блока управления электроприводами узла подачи кристаллов на позицию контроля 33). Вторая схема согласования 47 фиксирует команды, поступающие с контроллера 57 через дешифратор команд 56 (первый выход блока 35 обработки и выдачи команд, первый выход дешифратор команд 56). Производительность вибротранспортера 2 поддерживается на определенном уровне сигналами, поступающими с него на второй вход второй схемы управления 50 электроприводом 3 (второй вход системы автоматического регулирования 86). Кристалл, перемещаясь вдоль вибротранспортера 2, попадает на шнековый транспортер 4, где регистрируется фотоприемником фотоэлектронного датчика 6 регистрации излучения, сигнал с которого поступает на усилитель 64 (первый вход блока преобразования сигналов излучения 43, первый вход блока 32 блока регистрации местоположения кристаллов, первый вход блока 31 управления), демодулируется формирователем сигнала 65, детектируется в детекторе 66, сравнивается с опорным сигналом в компараторе 67, далее сигнал поступает на первый вход сумматора 69, на второй вход которого поступает сигнал с имитатора сигнала 68 местоположения кристалла на "сходе" с вибротранспортера 2, который формирует сигнал фотоэлектронного датчика 6 регистрации излучения в зависимости от времени работы шнекового транспортера 4 (третий выход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля). Имитатор сигнала 70 местоположения кристалла на "сходе" с шнекового транспортера 4 формирует импульс в зависимости от времени работы шнекового транспортера 4. С первого выхода блока регистрации местоположения кристаллов 32 сигнал поступает на первый вход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля (первый вход первой схемы согласования 46, первый вход схемы фиксации сигналов местоположения кристаллов 76), где сигнал сохраняется до момента включения шнекового транспортера 4. На второй вход схемы фиксации сигналов местоположения кристаллов 76 поступает сигнал с фотоэлектронного датчика 7 регистрации излучения. Сигнал с выхода схемы фиксации сигналов местоположения кристаллов 76 и сигнал фотоэлектронного датчика 8 регистрации излучения (первый и второй вход соответственно узла выбора режима коммутации 77) определяют режим коммутации в преобразователе сигналов 48. Далее сигнал проходит на первый вход преобразователя сигналов 48 (первый вход, второй выход коммутатора сигналов управления 79), где блокирует подачу питающего напряжения на вибротранспортер 2 (второй выход преобразователя сигналов 48, первый вход второй схемы управления 50 электроприводом 3 вибротранспортера 2). Вибротранспортер 2 останавливается (тем самым предупреждается завал шнекового транспортера 4), а шнековый транспортер 4 включается, так как с первого выхода преобразователя сигналов 48 поступает сигнал включения на первую схему управления 49 шаговым электроприводом 5 шнекового транспортера 4. Формирователь 83 напряжения питания шагового электропривода 5 шнекового транспортера 4 формирует напряжение питание для шагового электропривода 5 по сигналу с узла приема сигналов 82. Кристалл по шнековому транспортеру 4 перемещается до зоны регистрации фотоэлектронного датчика 7 регистрации излучения, где фиксируется его фотоприемником. Сигнал с выхода фотоприемника фотоэлектронного датчика 7 регистрации излучения поступает на первый вход блока преобразования сигналов излучения 44 (второй вход блока 31 управления, второй вход блока регистрации местоположения кристаллов 32), где усиливается в усилителе 71, демодулируется в формирователе сигнала 72, затем проходит на второй вход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля (второй вход первой схемы согласования 46), где блокирует работу шнекового транспортера 4 (первый выход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля, первый выход блока 31 управления). Шнековый транспортер 4 останавливается. Транспортная система готова подать материал на электронные весы 15 и подает сигнал на первый вход блока 35 обработки и выдачи команд (четвертый выход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля, второй выход первой схемы согласования 46). Сигнал подачи кристалла на электронные весы 15 поступает на четвертый вход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля (первый выход блока 35 обработки и выдачи команд, первый выход дешифратора 56, четвертый вход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля) и включает шнековый транспортер 4 (первый выход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля блока 31 управления). Кристалл "срывается" с шнекового транспортера 4 и "пролетает" через зону регистрации фотоэлектронного датчика 8 регистрации излучения, сигнал с фотоприемника последнего поступает на первый вход блока преобразования сигналов излучения 45 (третий вход блока 31 управления, третий вход блока 32 регистрации местоположения кристаллов), усиливается в усилителе 73, демодулируется в формирователе сигнала 74, проверяется на «нестандартность» в узле определения двойного сигнала 75. С третьего выхода блока 32 регистрации местоположения кристаллов сигнал поступает на второй вход блока 35 обработки и выдачи команд (второй вход контроллера 57) и на третий вход блока управления электроприводами 33 узла подачи кристаллов на позицию контроля (третий вход первой схемы согласования 46). По этому сигналу контроллер 57 начинает принимать данные с электронных весов 15 (пятый вход контроллера 57, пятый вход блока 35 обработки и выдачи команд, пятый вход блока 31 управления). Кристалл по направляющей трубке 9 попадает в 4-х секционный загрузочный ковш 10, установленный на электронных весах 15. Данные о показании веса поступают на пятый вход контроллера 57 (пятый вход блока 31 управления, пятый вход блока 35 обработки и выдачи команд). В контроллере 57 определяется номер приемного отсека 30, куда должен быть отправлен взвешиваемый кристалл и в виде сигнала с его первого выхода (пятый выход блока 35 обработки и выдачи команд) поступает на пятый вход блока контроля положения 52 координатных дисков 12, 19, 25 (второй вход формирователя сигнала отключения 88 схемы управления 55 шаговым электроприводом 24 воронкообразного распределителя 23, второй вход блока управления электроприводами 34 узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов). По сигналу с четвертого выхода блока 35 обработки и выдачи команд (второй выход дешифратора команд 56, первый вход формирователя сигнала отключения 88 первой схемы управления 49 шаговым электроприводом 5, четвертый вход блока контроля положения 52 координатных дисков 12, 19, 25, первый вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов) запускается поиск установленного в формирователе сигнала отключения 88 номера приемного отсека 30. На вход узла приема сигналов 94 (шестой вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов, второй вход схемы управления 53 шаговым электроприводом 11) с третьего выхода контроллера 57 (третий выход блока 35 обработки и выдачи команд) поступает сигнал включения шагового электропривода 11 4-х секционного загрузочного ковша 10 (с формирователя напряжения питания 93 формируется напряжение питания шагового электропривода 11). Храповик 13 входит в зацепление с 4-х секционным загрузочным ковшом 10 и поворачивает его вокруг оси, кристалл через перепускную трубку 16 попадает в 4-х секционный разгрузочный ковш 17. При повороте координатного диска 12 на угол, соответствующий принятию 4-х секционным загрузочным ковшом 17 конечного положения, сигнал с фотоприемника фотоэлектронного датчика 14 контроля положения поступает на вход узла приема сигналов 92 (третий вход блока контроля положения 52 координатных дисков 12, 19, 25, пятый вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов, шестой вход блока 31 управления), где формируется сигнал отключения электропривода 11 4-х секционного загрузочного ковша 10 (третий выход блока контроля положения 52 координатных дисков 12, 19, 25, первый вход и второй выход схемы управления 53 шаговым электроприводом 11, девятый выход блока 31 управления). На первый и шестой входы блока 34 поступает сигнал, приводящий в действие электропривод 24 воронкообразного распределителя 23 (второй выход блока 34, одиннадцатый выход блока 31).
При движении воронкообразного распределителя 23 данные о номере приемного отсека 30 считываются с координатного диска 25 и в виде сигнала с фотоэлектронного датчика 26 контроля положения поступают на схему согласования 89 сигналов с фотоэлектронным датчиком 26 контроля положения воронкообразного распределителя 23 (первый вход блока контроля положения 52 координатных дисков 12, 19, 25, восьмой вход блока 31 управления). При совпадении заданного контроллером 57 номера приемного отсека 30 с номером приемного отсека 30 регистрируемого фотоэлектронным датчиком 26 контроля положения на выходе формирователя сигнала отключения 88 (первый выход блока контроля положения 52) появляется сигнал, который передается на первый вход схемы управления 55 шаговым электроприводом 24 и далее с ее второго выхода (второй выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов, одиннадцатый выход блока 31 управления) на отключение электропривода 24 воронкообразного распределителя 23. На второй вход схемы управления 54 (узел приема сигналов 94) шаговым электроприводом 18 с третьего выхода дешифратора команд 56 (третий выход блока 31 управления, шестой вход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов) поступает сигнал включения электропривода 18 4-х секционного разгрузочного ковша 17 (второй выход схемы управления 54 шаговым электроприводом 18, третий выход блока 35 обработки и выдачи команд, десятый выход блока 31 управления). Четырехсекционный разгрузочный ковш 17 поворачивается вокруг своей оси, занимая конечное положение, определяемое координатным диском 19 и фотоэлектронным датчиком 20 контроля положения. Сигнал с фотоприемника фотоэлектронного датчика 20 контроля положения поступает на формирователь сигнала отключения 90 (второй вход блока контроля положения 52, седьмой вход блока 31 управления), где формирует сигнал остановки электропривода 18 4-х секционного разгрузочного ковша 17, который с второго выхода блока контроля положения 52 передается на первый вход схемы управления 54 и далее с ее второго выхода (третий выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов, десятый выход блока 31 управления) на вход электропривода 18. Кристалл проходит по приемной трубке 21, воронкообразному распределителю 23, через радиальное отверстие 28 в распределительном диске 27, в выводную трубку 29 и попадает в приемный отсек 30. Второй возможный путь прохождения кристалла определяется контроллером 57. По сигналу с контроллера 57 включается реверс электропривода 18 4-х секционного разгрузочного ковша 17 и кристалл попадает в приемную трубку 21 затем в копилку «нестандартных» кристаллов 22.
С третьего, четвертого, пятого, выхода блока 31 управления (шестой, пятый, четвертый выход блока 32 регистрации местоположения кристаллов, первый, второй, третий выход первого блока 36 формирования импульсов излучения) поступает питающее напряжение на ИК-излучатели фотоэлектронных датчиков 6, 7, 8 излучения, которые работают в импульсном режиме. В первом блоке 36 формирования импульсов излучения (формирователи импульсов 59, 60, 61) формируется импульсное напряжение для ИК-излучателей фотоэлектронных датчиков 6, 7, 8 излучения с частотой задающего генератора 58. Формирователи синхроимпульсов 62, 63 предназначены для формирования синхроимпульсов, которые поступают на демодуляцию в формирователи сигналов 65, 72, 74. С шестого, седьмого, восьмого выхода блока 31 управления (седьмой, шестой, пятый выход блока 34 управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов, исполнительного механизма раскладки кристаллов, первый, второй, третий выход второго блока 51 формирования импульсов излучения) поступает питающее постоянное напряжение на излучатели фотоэлектронных датчиков 14, 20, 26 контроля положения.
Предложенное техническое решение позволяет вести автоматическую покристальную сортировку алмазов по весу с высокой точностью и производительностью за счет нового конструктивного исполнения транспортной схемы, узлов взвешивания и раскладки кристаллов, наличия электронных блоков и связей, которые обеспечивают автоматическую связь между элементами в процессе их работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СОРТИРОВКИ КРИСТАЛЛОВ | 2016 |
|
RU2629740C1 |
| Устройство для считывания графической информации | 1980 |
|
SU920783A1 |
| Устройство для вывода графической информации | 1982 |
|
SU1027743A1 |
| Устройство для автоматической весовой сортировки кристаллов по группам | 1987 |
|
SU1553846A1 |
| АВТОМАТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2106674C1 |
| МОБИЛЬНОЕ РОБОТИЗИРОВАННОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ В АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ ХРАНЕНИЯ И ПОИСКА | 2024 |
|
RU2831700C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1991 |
|
RU2012035C1 |
| СПОСОБ ПЕРЕРАБОТКИ БЫТОВЫХ И ПРОИЗВОДСТВЕННЫХ ОТХОДОВ В ПЕЧНОЕ ТОПЛИВО И УГЛЕРОДНОЕ ВЕЩЕСТВО И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2552259C2 |
| Устройство для контроля положения рельсового пути | 2017 |
|
RU2672334C1 |

Изобретение относится к измерительной технике, в частности к точным устройствам для сортировки мелких предметов неоднородной формы типа кристаллов алмаза по весовым группам. Технический результат изобретения - повышение точности и производительности. Устройство содержит бункер загрузки кристаллов, узел подачи кристаллов на позицию контроля, узел определения массы кристаллов, узел контроля сброса кристаллов, исполнительный механизм раскладки кристаллов и блок управления. Последний содержит блок регистрации местоположения кристаллов с оптическим датчиком, блок управления электроприводами узла подачи кристаллов на позицию контроля, блок управления электроприводами узла определения массы кристаллов, узла контроля сброса кристаллов и исполнительного механизма раскладки кристаллов, блок обработки и выдачи команд. Указанные блоки соединены определенным образом для обеспечения заявленного технического результата. 2 з.п. ф-лы, 9 ил.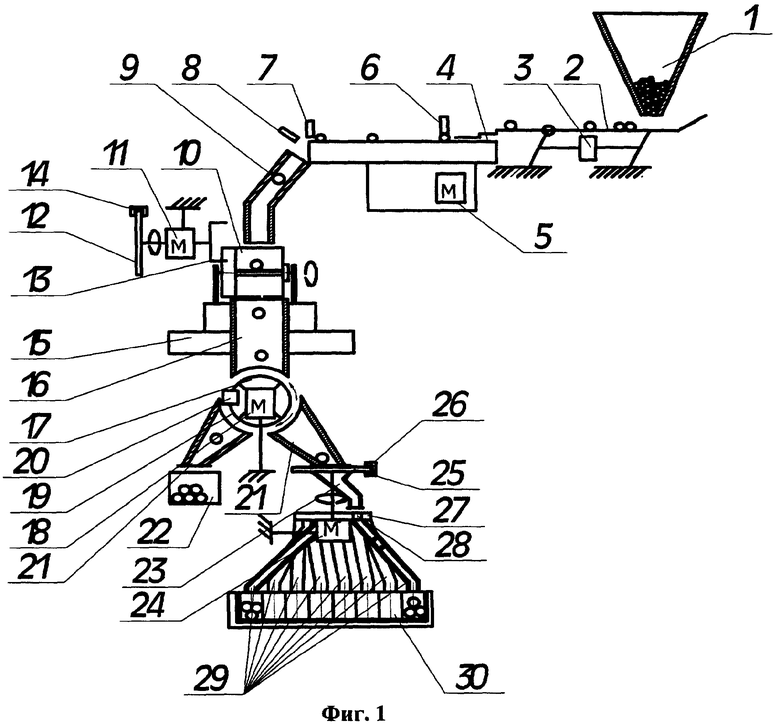
| Устройство для автоматической сортировки кристаллов | 1990 |
|
SU1804922A1 |
| Сепаратор для сортировки прозрачных объектов | 1990 |
|
SU1761286A1 |
| Устройство для автоматической весовой сортировки кристаллов по группам | 1987 |
|
SU1553846A1 |
| УСТРОЙСТВО для СОРТИРОВКИ ПРЕДМЕТОВ по ВЕСУ | 0 |
|
SU368495A1 |
| US 6712221 В2, 30.03.2004 | |||
| US 6680452 B2, 20.01.2002 | |||
| US 5246118 A, 21.09.1993 | |||
| US 5383561 A, 24.01.1995 | |||
| US 4147618 A, 03.04.1979. | |||

