Изобретение относится к силовым системам управления летательных аппаратов с аэродинамическими исполнительными механизмам (рулями, интерцепторами) и может быть использовано в быстродействующих электромагнитных и пневматических рулевых приводах малогабаритных управляемых ракет и снарядов, работающих в релейном режиме.
Одной из основных выходных характеристик указанного рулевого привода летательного аппарата является уровень максимального отклонения выходной координаты исполнительного механизма, который определяет управляющую перегрузку при рейсе летательного аппарата. Требуемый уровень максимального отклонения выходной координаты исполнительного механизма устанавливается при сборке и настройке привода.
Известен способ настройки пневмопривода, при котором настройка максимального уровня выходной координаты исполнительного механизма осуществляется путем настройки рабочего хода силового элемента. Указанный способ осуществлен в известном пневмоприводе (Костин С.В., Петров Б.И., Гамынин Н.С. Рулевые приводы. М.: Машиностроение, 1973, стр.102, рис.2.5). Максимальные уровни углов отклонения руля (+δ и -δ), являющегося исполнительным механизмом, определяются величиной перемещения штока данного привода Хш, кинематически связанного с рулем. На штоке жестко закреплен силовой элемент пневмопривода - поршень, рабочий ход которого и определяет, в конечном счете, максимальные уровни углов отклонения руля. Осуществляя настройку величины рабочего хода поршня газового двигателя (ГД) подбором толщины прокладок между корпусом ГД и крышкой, через которую проходит шток, устанавливают требуемые значения максимальных уровней углов отклонения руля +δ и -δ.
Известен также способ настройки электромагнитного привода, принятый авторами в качестве прототипа, при котором настройка максимального уровня выходной координаты исполнительного механизма осуществляется настройкой рабочего хода якоря. Рассматриваемый способ реализован в блочном реверсивном арматурном электромагнитном приводе (Щучинский С.Х. Электромагнитные приводы исполнительных механизмов. М.: Энергоатомиздат, 1984, стр.34, рис.10). Электромагнитный привод состоит из корпуса 1, на котором размещены два втяжных электромагнита, якоря которых, совмещенные в единой детали - сердечнике 4, при помощи установленного в них на резьбе штока 5 соединены с исполнительным механизмом. Электромагнитный привод функционирует следующим образом. При подаче сигнала управления в обмотку катушки 2 сердечник 4, являющийся деталью, совмещающей два якоря, перемещается в левую сторону до упора своей поверхностью в полюс 3. При подаче сигнала управления в обмотку катушки 13 (и снятия сигнала с обмотки катушки 2) сердечник перемещается в правую сторону до упора другой рабочей поверхностью в полюс 12. При этом исполнительный механизм, связанный со штоком 5, который завернут в сердечнике 4, перемещается на величину рабочего хода сердечника. Рабочий ход совмещенных якорей в одну и другую сторону, а значит, и максимальные уровни перемещения исполнительного механизма настраиваются путем подбора толщин прокладок между корпусом электромагнитного привода 1 и полюсами 3 и 12. Таким образом, и в пневмоприводе, и в электромагнитном приводе максимальные уровни выходной координаты исполнительного механизма устанавливаются путем настройки величины рабочего хода силового элемента - поршня или якоря. В случае необходимости настройки быстродействующего электромагнитного привода летательного аппарата рассмотренный способ настройки приводит к искажению отработки рулями команды управления, что не всегда может быть приемлемо. Объясняется это следующим обстоятельством. Так, в процесс функционирования, например, быстродействующего электромагнитного привода его якорь, соединенный с рулем кинематической упругой связью, подходит к своему упору, которым служит полюс, с высокой скоростью. После остановки якоря упором руль вследствие приобретенной при движении кинематической энергии по инерции продолжает двигаться дальше до тех пор, пока его кинематическая энергия не преобразуется в потенциальную энергию деталей кинематики, обладающих определенной упругостью (с учетом диссипативных потерь энергии за счет трения о воздух и наличия внутреннего трения в материале деталей кинематики). Затем руль останавливается и за счет запасенной потенциальной энергии в упругой кинематике начинает перемещаться в обратную сторону. При этом в момент прохождения угла, соответствующего положению якоря на упоре, руль приобретает достаточную скорость, чтобы оторвать якорь от упора, и совместно с ним начинает перемещаться в сторону уменьшения угла отклонения. Затем под действием электромагнитной силы якорь тормозится и возвращается на упор, увлекая за собой руль. Указанный процесс повторяется несколько раз до тех пор, пока энергии, уменьшающейся в каждом цикле из-за диссипативных потерь, будет достаточно для отрыва якоря от упора.
Таким образом, при функционировании рулевого привода имеют место отскоки от упора якоря совместно с рулем. В результате уменьшается амплитуда первой гармоники управляющей перегрузки и искажается линейность по коэффициенту передачи рулевого привода, что приводит к ухудшению качества управления летательным аппаратом в рейсе.
Задачей предлагаемого изобретения является улучшение качества управления летательного аппарата за счет разработки способа настройки быстродействующего рулевого привода летательного аппарата и его конструкции, позволяющих снизить величину отскока исполнительного механизма при функционировании привода.
Для решения поставленной задачи предложен способ настройки рулевого привода летательного аппарата, при котором производят настройку величины рабочего хода его силового элемента для обеспечения предельных уровней выходной координаты исполнительного механизма. Новым по сравнению с прототипом является то, что после настройки величины рабочего хода силового элемента привода устанавливают уровни максимального отклонения исполнительного механизма в одну и другую сторону, соответствующие превышению предельных уровней отклонения силового элемента на 5-10%. Затем на вход рулевого привода подают входной сигнал рабочей частоты и при функционирующем приводе проводят дополнительную подрегулировку предельных уровней отклонения исполнительного механизма в указанных выше пределах, добиваясь минимальной амплитуды его отскока.
Для осуществления предлагаемого способа настройки разработан электромагнитный блок рулевого привода летательного аппарата, который состоит из расположенных на корпусе двух электромагнитов втяжного типа, якоря которых связаны друг с другом и кинематически соединены с исполнительным механизмом.
Новым является то, что каждый якорь содержит шток, при этом штоки завернуты в якорях с контргайкой, расположенной со стороны торца якоря, противоположного рабочему, связь якорей осуществлена при помощи штоков, кинематически связанных с кулисой, жестко закрепленной на оси руля и расположенной между корпусом и пластиной, установленной на корпусе. При этом в пластине завернуты два винта с контргайками, которые имеют возможность контактировать с кулисой при ее поворотах в обе стороны.
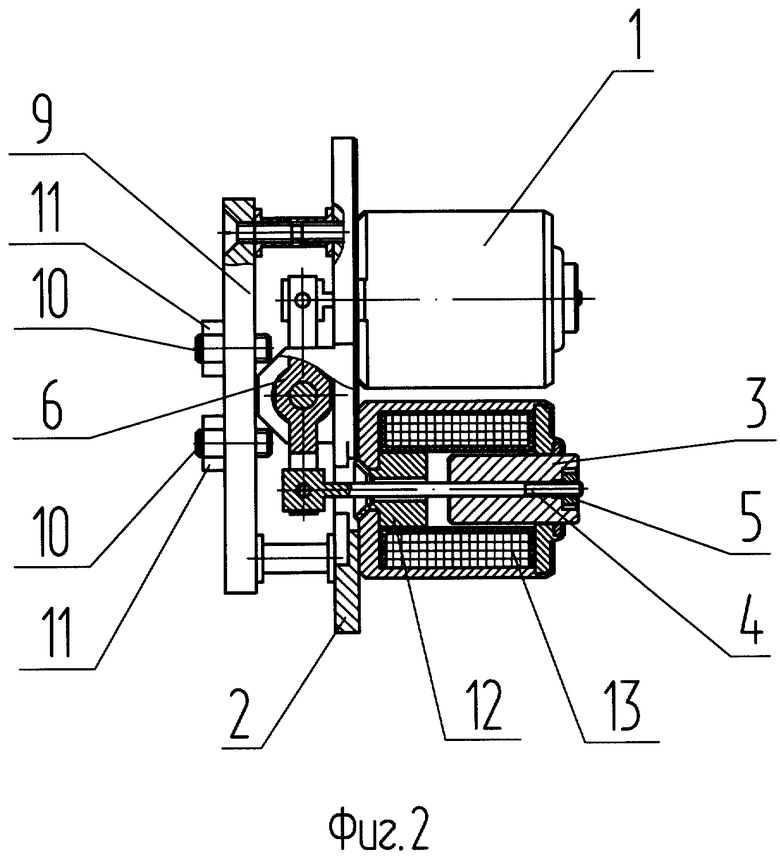
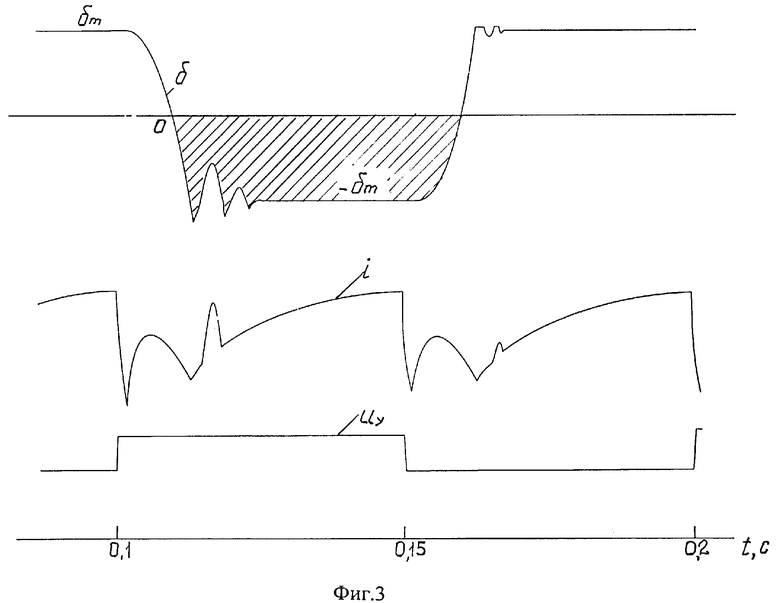
Данное изобретение поясняется графическим материалом, где на фиг.1, 2 показана конструктивная схема рулевого привода, а на фиг.3 - образца осциллограмм переходных процессов по току в обмотках и перемещению руля.
На фиг.1, 2 представлена конструктивная схема блока рулевого привода, который состоит из двух втяжных электромагнитов 1, расположенных на корпусе 2. В якоре 3 каждого электромагнита установлен на резьбе шток 4, резьбовая часть которого выходит за противоположный рабочему торец якоря. На конце резьбовой части штока находится контргайка 5. Штоки 4 кинематически соединены с кулисой 6, которая закреплена на оси 7 руля 8, являющегося исполнительным механизмом в блоке рулевого привода. На корпусе 2 со стороны кулисы установлена пластина 9, в которой имеются два резьбовых отверстия для установки винтов 10 с контргайками 11. В зависимости от глубины заворачивания винтов 10 устанавливается величина максимального отклонения руля с кулисой, с которой контактируют винты.
Функционирует блок рулевого привода следующим образом.
При подаче управляющего напряжения в обмотку управления 13 нижнего электромагнита его якорь 3 притягивается к полюсу 12. Шток 4, перемещаясь с якорем, разворачивает кулису 6 с рулем 8 по часовой стрелке. При этом после остановки якоря у своего полюса перемещение кулисы за счет упругости деталей кинематики ограничено упором кулисы в нижний винт 10.
При подаче управляющего напряжения в обмотку верхнего электромагнита, перечисленные выше процессы происходят в левом электромагните и кулиса 6 с осью 7 руля 8 разворачивается против часовой стрелки с ограничением угла ее поворота верхним винтом 10.
Настройку привода начинают с регулировки положения якорей на резьбовой части своих штоков, при которой обеспечивают требуемые максимальные углы отклонений руля из его среднего положения в каждую сторону. По окончании регулировки положение якоря на штоке фиксируется контргайками 5. Затем последовательно якоря доводят до соприкосновения со своими полюсами и выставляют зазоры между кулисой и винтами 10. Величина указанных зазоров должна обеспечивать возможность дополнительного увеличения угла отклонения руля из-за упругой деформации деталей в кинематике.
После указанных операций подают на БРП входной сигнал рабочей частоты и, анализируя процесс отклонения руля в динамике, дополнительно регулируют винтами 10 зазоры, обеспечивая минимально возможные отскоки руля,
По окончании регулировки винты 10 фиксируются контргайками 11. При этом, как показала практика настройки приводов, минимальные отскоки руля имеют место при зазорах между кулисой 6 и винтами 10, соответствующих увеличению максимального угла отклонения руля не более чем на 10%. Нижний же предел в 5% выбран с целью гарантированного обеспечения расчетного значения максимального угла отклонения руля.
На фиг.3 представлены экспериментальные переходные процессы по току в обмотках электромагнитного привода и углу отклонения его руля при частоте сигнала управления 10 Гц и при нулевой команде. При этом в сторону положительных значений углов отклонения руля привод настроен по предлагаемому авторами способу, а в сторону отрицательных - по способу прототипа.
Из анализа переходного процесса по углу отклонения руля следует, что в случае настройки привода по способу прототипа руль после прихода якоря на упор имеет значительные по времени отскоки, снижающие в момент отскока уровень максимального отклонения руля на 47%, т.е. и перегрузку управления (в заштрихованной области). В процессе полета летательного аппарата, как правило, команда управления отличается от нулевой, что приводит к изменению скважности входного сигнала. При этом при уменьшении длительности отрицательного меандра в сигнале относительная доля отскока руля в нем увеличивается, что дополнительно приводит и искажению линейности коэффициента передачи привода.
В случае настройки электромагнитного рулевого привода по заявляемому способу отскоки руля уменьшаются с 47% до 7% по амплитуде с одновременным уменьшением времени отскока.
Таким образом, предложенный авторами способ настройки рулевого привода позволил снизить погрешность в отработке приводом команды управления при рейсе летательного аппарата за счет существенного уменьшения отскока руля от упора, а разработанный электромагнитный блок рулевого привода - осуществить предложенный способ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2283472C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2309084C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2370727C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2000 |
|
RU2167386C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2237857C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234670C2 |
| Отсек рулевого привода управляемой ракеты | 2020 |
|
RU2743420C1 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| ХВОСТОВОЙ ОТСЕК ВОЗДУШНО-ДИНАМИЧЕСКИХ РУЛЕВЫХ ПРИВОДОВ ДЛЯ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ПРЕИМУЩЕСТВЕННО ДЛЯ УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ) И ПНЕВМОДВИГАТЕЛЬ РУЛЕВОГО ПРИВОДА | 2009 |
|
RU2418261C2 |
Группа изобретений относится к области вооружения. Способ настройки рулевого привода летательного аппарата включает настройку величины рабочего хода его силового элемента для обеспечения предельных уровней выходной координаты исполнительного механизма. Устанавливают уровни максимального отклонения исполнительного механизма в одну и другую стороны, соответствующие превышению предельных уровней отклонения силового элемента на 5-10%. На вход рулевого привода подают входной сигнал рабочей частоты и при функционирующем приводе проводят дополнительную подрегулировку предельных уровней отклонения исполнительного механизма в указанных выше пределах, добиваясь минимальной амплитуды его отскока. В способе реализован электромагнитный блок рулевого привода летательного аппарата, содержащий корпус, на котором расположены два втяжных электромагнита, якоря которых связаны друг с другом и кинематически соединены с исполнительным механизмом. Каждый якорь содержит шток. Штоки завернуты в якорях с контргайкой. Связь якорей осуществлена путем кинематического соединения штоков с кулисой, жестко закрепленной на оси руля и расположенной между корпусами и пластиной, установленной на корпусе, при этом пластина содержит два винта с контргайками, имеющими возможность контактировать с кулисой при ее поворотах в обе стороны. При использовании изобретения улучшается качество управления летательного аппарата. 2 с.п. ф-лы, 3 ил.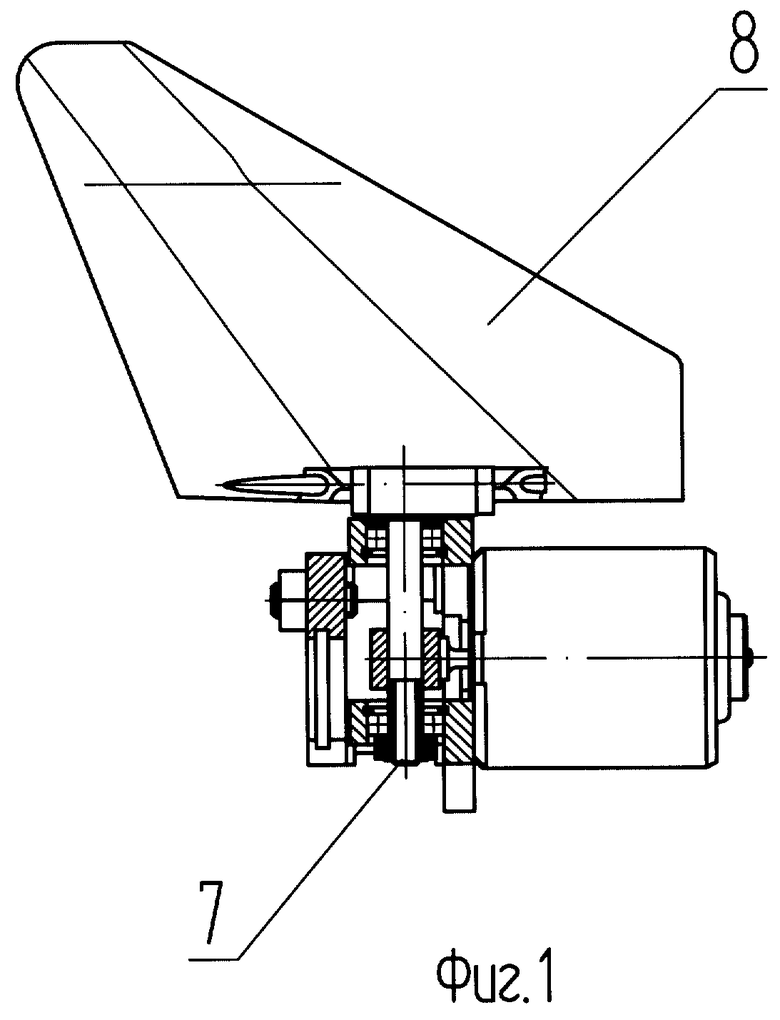
| ЩУЧИНСКИЙ С.Х., Электромагнитные приводы исполнительных механизмов, М., Энергоатомиздат, 1984, с.34, рис.10 | |||
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ РУЛЕВЫХ ПРИВОДОВ И АВТОПИЛОТОВ УПРАВЛЯЕМЫХ СНАРЯДОВ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2182702C2 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2121650C1 |
| СПОСОБ СОГЛАСОВАНИЯ ЭЛЕКТРИЧЕСКОГО И МЕХАНИЧЕСКОГО НУЛЕЙ РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2233422C2 |
| КАНАТНЫЙ СТАВ ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU184704A1 |

