Заявляемое техническое решение относится к силоизмерительной технике, в частности к устройствам для замера знакопеременной нагрузки, проходящей через нуль, например к устройствам для измерения силы в виде прямой и обратной тяги, передаваемой от двигателей к транспортным средствам, в частности к летательным аппаратам, при помощи резисторных тензометров силы.
Известна конструкция датчика силы, чувствительного к деформации, с использованием тензорезисторов (патент США 3577779, МПК2 G 01 L 1/22, дата подачи заявки 14 марта 1969 г., дата публикации патента 4 мая 1971 г.).
Датчик силы содержит упругодеформируемую часть - консольную балку в виде прямоугольного параллелепипеда. Один конец балки зафиксирован на кронштейне датчика, а другой подвижен. На нижней и верхней несущих гранях этого параллелепипеда балки размещены упомянутые тензорезисторы, воспринимающие измеряемое усилие.
В описании к патенту США 3577779 представлены, по меньшей мере, три примера возможного воплощения рассматриваемого технического решения.
В наиболее простом примере в параллелепипеде балки перпендикулярно боковым граням выполнены два сквозных отверстия равного диаметра. Эти отверстия соединены между собой продольным сквозным пазом с внутренними поверхностями параллельными как между собой, так и относительно верхней и нижней несущих граней. Расположение отверстий и паза таково, что их продольные оси лежат в плоскости, параллельной содержащим тензорезисторы несущим граням, параллелепипеда балки. При этом отверстия выполнены достаточно близко к этим граням. Благодаря такому положению отверстий и паза образуются относительно тонкие участки между верхними и нижними половинами данных отверстий. Вместе с этим концы балки остаются более жесткими.
При приложении силы к подвижному концу балки как упругодеформируемой детали балка начинает изгибаться, а ее деформируемый конец удлиняется на определенную величину. Однако обе несущие грани остаются параллельными благодаря жестким концам параллелепипеда балки. Вместе с тем сами концы балки перемещаются линейно, а не дугообразно. При этом упругие деформации на относительно тонких участках балки вызывают оптимальные поверхностные деформации в местах, где закреплены тензорезисторы.
В другом возможном примере воплощения технического решения в параллелепипеде балки перпендикулярно боковым граням для увеличения чувствительности узла консольной балки выполнены два дополнительных сквозных отверстия, продольные оси которых перпендикулярны продольным осям первых из описанных отверстий.
Для преобразования в электрические сигналы деформаций от приложения силы к части, воспринимающей измеряемое усилие, каждый из тензорезисторов прикрепляется к относительно тонким и податливым при приложении силы участкам частей несущих граней. Области самой высокой деформации сконцентрированы именно на этих участках. Более того, сам узел балки имеет тенденцию создавать выходные сигналы тензорезисторов линейными относительно усилий, которые деформируют их (при этом тензорезисторы соединены между собой по мостовой схеме). Наиболее оптимальными в этом случае являются полупроводниковые тензорезисторы.
Однако рассматриваемая конструкция чувствительного к деформации датчика силы имеет ряд недостатков:
1. Тензорезисторы, расположенные на несущих гранях, работают совместно при приложении усилия, что снижает точность их измерений.
2. Нет предварительной загрузки тензорезисторов, что уменьшает их рабочий диапазон и создает дополнительные погрешности при измерении действующих усилий.
3. Нерациональное использование рабочих поверхностей упругих элементов из-за симметричного их расположения.
Наиболее близким по технической сущности к предлагаемому устройству для измерения тяги является техническое решение в виде тензорезисторного датчика силы по авторскому свидетельству СССР 1649314 (заявитель Одесское производственное объединение "Точмаш", МПК4 G 01 L 1/22, дата подачи заявки 20 октября 1989 г., дата публикации 15 мая 1991 г.).
Данное техническое решение содержит как встраиваемый узел получения и передачи силы от источника нагрузки упругодеформируемый прямоугольный параллелепипед, консольно закрепленный одним торцом и нагружаемый измеряемым усилием Р у другого. Перпендикулярно боковым граням параллелепипеда балки выполнены два сквозных отверстия и соединяющий их сквозной продольный паз, поверхности которого размещены по обе стороны продольной плоскости симметрии параллелепипеда балки. Эти отверстия образуют с несущими гранями упругие шарниры. На нижней и верхней несущих гранях, вдоль продольной оси симметрии каждой, размещены по два плоских тензорезистора. При этом их размещение предпочтительно симметрично каждой из вертикальных плоскостей симметрии каждого из отверстий, сообщенных со сквозным продольным пазом.
Устройство работает следующим образом.
При воздействии силы Р упругие шарниры параллелепипеда балки изгибаются, при этом происходит деформация тензорезисторов. Два тензорезистора, расположенные на верхней несущей грани, растягиваются, а два других, расположенные на нижней несущей грани, сжимаются. Деформация тензорезисторов, контакты которых соединены по мостовой схеме, преобразуется в электрический сигнал, пропорциональный изменяемому усилию.
При этом рассматриваемое устройство тензорезисторного датчика силы имеет некоторые недостатки:
1. Верхние и нижние тензорезисторы работают совместно при приложении усилия, что значительно снижает точность их измерений.
2. Нет предварительной загрузки тензорезисторов, что уменьшает диапазон их работы.
3. Упругие шарниры выполнены симметрично, так как тензорезисторы рассчитаны для замера одинаковых (по модулю) величин знакопеременных нагрузок, что является нерациональным.
Целью создания заявляемого технического решения являлась возможность его использования в авиации путем создания компактной и технологичной конструкции, которая была бы удобной и надежной в работе не только при стендовых, но и летных испытаниях.
Вместе с этим перед авторами стояла задача создать такое техническое решение, которое позволило бы достичь совокупного технического результата, содержащего несколько логически взаимосвязанных и находящихся в причинно-следственной связи прогрессивных технических результатов, а именно:
1. Рациональное использование рабочих поверхностей упругодеформируемой детали.
2. Сведение действующей распределенной нагрузки к точечной и, соответственно, повышение точности ее замера тензорезисторами.
3. Создание оптимального диапазона работы тензорезисторов при измерении действующих усилий.
Поставленная задача решается тем, что в заявляемом устройстве для измерения силы тяги, содержащем узел получения и передачи силы от источника нагрузки, где указанный узел включает упругодеформируемую деталь с шарниром, на параллельных поверхностях которой размещены тензорезисторы, и при этом в упомянутой детали выполнен сквозной паз, поверхности которого размещены по обе стороны продольной оси этой детали и параллельны между собой, произведен ряд усовершенствований.
А именно, упомянутый узел получения и передачи силы содержит штангу, воспринимающую силу от источника нагрузки, и дополнительное звено ее передачи. При этом штанга и дополнительное звено последовательно взаимосвязаны между собой посредством соединения, в которое введен упомянутый шарнир в виде сферического подшипника.
Указанная упругодеформируемая деталь содержит цилиндрическую часть, введенную в упомянутый сферический подшипник, в пределах продольного сечения которого размещен указанный сквозной паз.
Эта совокупность усовершенствований способствует взаимосвязи заявляемого технического решения с устройством подвески авиационного двигателя к летательному аппарату.
Внутри указанного сквозного паза на параллельных поверхностях его стенок закреплены упомянутые тензорезисторы. Таким образом, они защищены от внешнего случайного воздействия, чем обеспечивается корректность и надежность результатов замеров.
На наружной поверхности упомянутой цилиндрической части упругодеформируемой детали вокруг указанного сквозного паза выполнены две кольцевые проточки. Это повышает чувствительность детали путем сведения действующей распределенной нагрузки к точечной.
Указанная цилиндрическая часть упругодеформируемой детали может быть выполнена в виде болта, посредством которого упомянутая штанга взаимосвязана с дополнительным звеном.
При этом в теле этого болта может быть дополнительно выполнено продольное отверстие, через которое из указанного сквозного паза выведены провода от каждого из тензорезисторов, что также обеспечивает компактность и лаконичность конструкции.
В частном случае выполнения данного технического решения указанный сквозной паз выполнен асимметрично относительно продольной оси упомянутой цилиндрической части упругодеформируемой детали.
Заявляемое техническое решение иллюстрируется чертежами в случае его использования в авиационной промышленности при испытании взаимодействия летательных аппаратов и их двигателей, в частности газотурбинных, где решение такой задачи особо актуально.
На фиг.1 изображен газотурбинный двигатель, установленный на пилоне летательного аппарата с узлом получения и передачи силы (тяги) от источника нагрузки в виде газотурбинного двигателя на летательный аппарат.
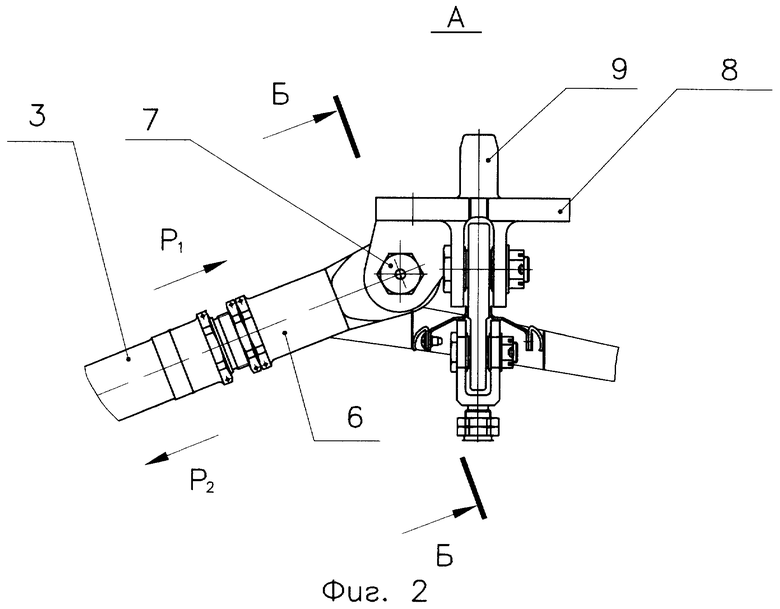
На фиг.2 - узел получения и передачи прямой и обратной тяги газотурбинного двигателя как ее источника в виде штанги и дополнительного звена (элемент А фиг.1).
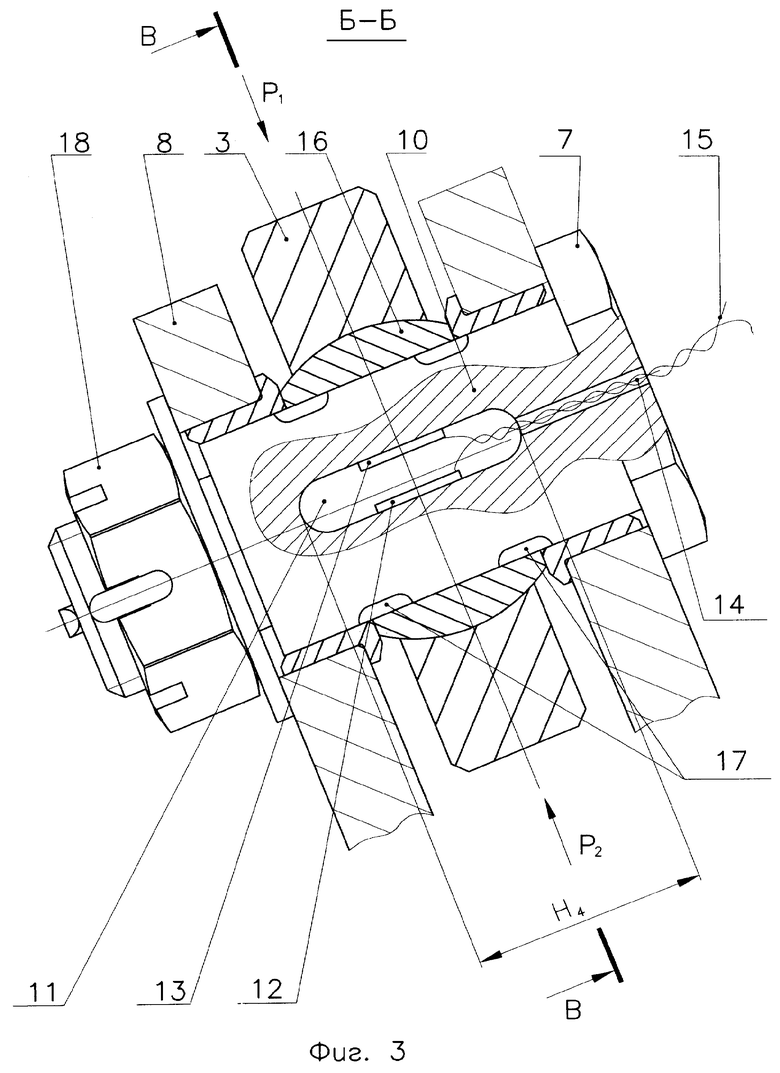
На фиг.3 - поперечное сечение Б-Б фиг.2 через соединение штанги с дополнительным звеном посредством соединения, содержащего цилиндрическую часть упругодеформируемой детали.
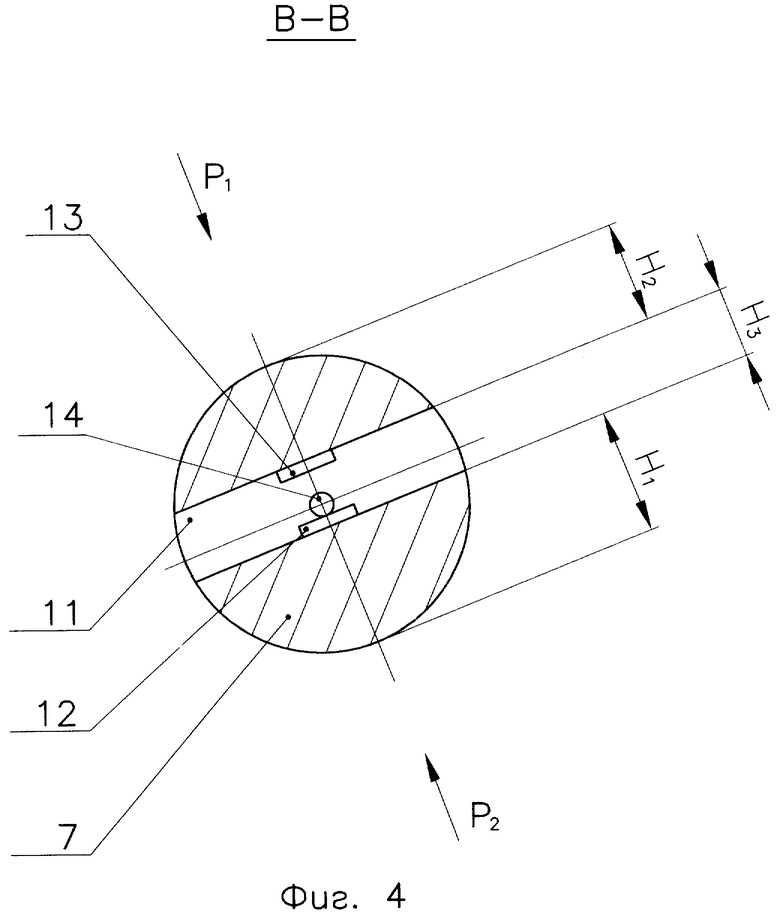
На фиг.4 - поперечное сечение В-В фиг.3 через цилиндрическую часть упругодеформируемой детали с тензорезисторами, установленными в ее продольном сквозном пазу.
Заявляемое техническое решение иллюстрируется на примере устройства для замера прямой и обратной тяги газотурбинных двигателей летательных аппаратов, что не исключает возможности его использования в иных необходимых случаях.
Устройство для измерения тяги включает газотурбинный двигатель 1 (см. фиг.1) как источник нагрузки, установленный на пилоне 2 летательного аппарата, штангу, воспринимающую силу от источника нагрузки, в виде наклонной штанги 3 съема прямой и обратной тяги.
Наклонная штанга 3 съема прямой и обратной тяги своим передним концом 4 крепится к промежуточному корпусу 5 двигателя 1, а задним 6 (см. фиг.2) - с помощью болта 7 к дополнительному звену передачи силы (тяги) в виде кронштейна 8, который в свою очередь крепится к пилону 2. На кронштейне 8 выполнен штырь 9, предназначенный для передачи прямой и обратной тяги двигателя 1 через наклонную штангу 3 на пилон 2 летательного аппарата.
При этом болт 7 (см. фиг.3) отличается тем, что в области его цилиндрической гладкой части 10 и вдоль последней перпендикулярно штанге 3 выполнен сквозной паз 11, ось которого смещена параллельно относительно продольной оси болта 7.
Длина паза 11 обозначена размером Н3. Таким образом образуется цилиндрическая часть упругодеформируемой детали, выполненная в виде болта 7.
Сквозной паз 11 делит цилиндрическую гладкую часть болта 7 на два продольных сектора (см. фиг.4), имеющие максимальные размеры поперечных сечений H1 и H2. Эти размеры различны как следствие параллельного асимметричного смещения оси паза 11 относительно продольной оси болта 7, например H1>H2. Тем самым предполагается, что сектор болта 7, имеющий размер Н1, воспринимает большее усилие (при включении прямой тяги воспринимается усилие Р2), чем противоположный сектор, имеющий размер H2 (при включении обратной тяги воспринимается усилие P1).
Внутри паза 11 (см. фиг.3) размещены тензорезисторы 12 и 13, от которых через продольное отверстие 14 выводятся провода 15, взаимосвязанные с соответствующим устройством контроля (не показано). Причем тензорезистор 12 прикреплен к внутренней стенке сектора болта 7, имеющего размер H1 (см. фиг.4), а тензорезистор 13 - к внутренней стенке сектора болта 7, имеющего размер Н2.
Болт 7 (см. фиг.3) соединяет наклонную штангу 3 съема прямой и обратной тяги с кронштейном 8 через сферический подшипник 16. Наличие этого подшипника 16 позволяет самоустанавливаться действующим усилиям Р1 или Р2 вдоль оси наклонной штанги 3.
Симметрично вдоль поперечной оси болта 7 и продольной оси сферического подшипника 16 на цилиндрической гладкой части 10 болта 7 выполнены две кольцевые проточки 17, предназначенные для сведения действующей распределенной нагрузки к точечной. Это повышает точность замера усилия тензодатчиками 12 и 13, а также позволяет изменять жесткость секторов болта 7.
Болт 7 затягивается гайкой 18, за счет заворота которой производится предварительная загрузка тензорезисторов 12 и 13, что позволяет увеличить диапазон их работы.
Размеры H1 (толщина сектора, воспринимающего силу Р2, действующую при создании прямой тяги), Н2 (толщина сектора, воспринимающего силу Р1, действующую при создании обратной тяги), Н3 (длина сквозного паза 11, выполненного в болте 7) и размеры кольцевых проточек 17 подбираются исходя из величины замеряемой силы и чувствительности тензорезисторов, что приводит к рациональному использованию рабочих поверхностей упругодеформируемой детали в виде болта 7 и работе тензорезисторов 12 и 13 в диапазоне минимальных погрешностей.
Устройство работает следующим образом.
При необходимости замера прямой или обратной тяги газотурбинного двигателя 1 (см. фиг.1) в кронштейне 8 перпендикулярно наклонной штанге 3 съема прямой и обратной тяги устанавливается болт 7 (см. фиг.3), у которого выполнен сквозной неосесимметричный паз 11. При этом паз 11 располагается перпендикулярно направлению наклонной штанги 3 и соответственно действию сил P1 и Р2.
При создании прямой тяги газотурбинным двигателем 1 действующая сила Р2 (см. фиг.2) через наклонную штангу 3, сферический подшипник 16 (см. фиг.3) передается на болт 7, а от него на кронштейн 8 и через его штырь 9 на пилон 2 летательного аппарата (см. фиг.2 и 1). При этом указанная сила действует на один из секторов болта 7, имеющего размер H1 (см. фиг.4), который деформируется совместно с тензорезистором 12.
При создании обратной тяги газотурбинным двигателем 1 (включении реверса) действует сила P1 (см. фиг.2), передаваемая на пилон 2 летательного аппарата (см. фиг.1) таким же образом, как и при создании прямой тяги. При этом указанная сила действует на другой сектор болта 7, имеющего размер H2 (см. фиг.4), который деформируется совместно с тензорезистором 13.
Изменение сопротивления тензорезисторов 12 и 13 через специальную электрическую схему регистрируется приборами (не показаны), которые после тарировки указывают конкретную тягу, передаваемую газотурбинным двигателем 1 на пилон 2 летательного аппарата (см. фиг.1).
На сегодняшний день данное устройство для замера прямой и обратной тяги газотурбинного двигателя проходит доводку на испытательных стендах и успешно доказывает заявленный технический результат. В будущем планируется использовать данное устройство на газотурбинных двигателях для замера их прямой и обратной тяги в полете.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КРЕПЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ К ЛЕТАТЕЛЬНОМУ АППАРАТУ | 2008 |
|
RU2388659C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ, ПОДВЕШЕННЫЙ К ПИЛОНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2487056C2 |
| ПОДВЕСКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ К КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2487820C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ АВИАЦИОННОГО ДВИГАТЕЛЯ, СОДЕРЖАЩЕЕ КОМПАКТНОЕ УСТРОЙСТВО ДЛЯ ВОСПРИЯТИЯ СИЛЫ ТЯГИ | 2008 |
|
RU2472676C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ЗАКРЕПЛЕННЫЙ НА ПИЛОНЕ ФЮЗЕЛЯЖА ЛЕТАТЕЛЬНОГО АППАРАТА С ПОМОЩЬЮ ОБЕСПЕЧИВАЮЩЕЙ БЕЗОПАСНОСТЬ ПОДВЕСКИ | 2011 |
|
RU2583243C2 |
| ЗАДНИЙ ПОЯС ПОДВЕСКИ ГАЗОТУРБИННОГО ДВУХКОНТУРНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2238224C1 |
| БАЛКА ПОДВЕСКИ ТУРБИННОГО ДВИГАТЕЛЯ К КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2571680C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, СОДЕРЖАЩИЙ СРЕДСТВА ПОДВЕСКИ | 2019 |
|
RU2784242C2 |
| ГАЗОТУРБИННАЯ УСТАНОВКА, ОБОРУДОВАННАЯ СРЕДСТВАМИ ПЕРЕДАЧИ УСИЛИЙ ТЯГИ ЕЕ ДВИГАТЕЛЯ | 2014 |
|
RU2677312C2 |
Изобретение относится к устройствам для замера знакопеременной нагрузки, например к устройствам для измерения силы в виде прямой и обратной тяги, передаваемой от двигателей к транспортным средствам. Предложенное изобретение направлено на: рациональное использование рабочих поверхностей упругодеформируемой детали; сведение действующей распределенной нагрузки к точечной и, соответственно, повышение точности ее замера тензорезисторами; создание оптимального диапазона работы тензорезисторов при измерении действующих усилий. Для этого предложенное устройство содержит узел получения и передачи силы от источника нагрузки, включающий упругодеформируемую и содержащую шарнир деталь, на параллельных поверхностях которой размещены тензорезисторы, при этом в последней выполнен сквозной паз, а поверхности паза по обе стороны продольной оси этой детали параллельны между собой. При этом упомянутый узел содержит штангу, воспринимающую силу от источника нагрузки, и дополнительное звено ее передачи, последовательно взаимосвязанные между собой посредством соединения, в которое введен упомянутый шарнир в виде сферического подшипника, при этом указанная упругодеформируемая деталь содержит цилиндрическую часть, введенную в упомянутый сферический подшипник, в пределах продольного сечения которого размещен указанный сквозной паз, причем упомянутые тензорезисторы закреплены внутри этого паза на параллельных поверхностях его стенок. 4 з.п. ф-лы, 4 ил.
| DE 3427907 A1, 30.01.1986 | |||
| ЕР 0199067 A3, 29.10.1986 | |||
| DE 3433739 A1, 20.03.1986 | |||
| УСТРОЙСТВО ДЛЯ ФОРМООБРАЗОВАНИЯ ИЗДЕЛИЙ ОЖИВАЛЬНОЙ ФОРМЫ | 0 |
|
SU175917A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ АКСИАЛЬНОЙ СИЛЫ | 1989 |
|
RU2063008C1 |
| Комбинированное шасси с применением колес и лыж одновременно | 1929 |
|
SU46849A1 |
| Устройство для динамометрирования прицепных сельскохозяйственных машин | 1987 |
|
SU1432352A1 |
| ВЫСЕВАЮЩИЙ АППАРАТ | 2004 |
|
RU2275784C1 |
| БЛИНДАЖ-КАЗАРМА | 2004 |
|
RU2278231C2 |

