Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением поезда для непрерывного во времени определения и контроля позиции поезда на пути в процессе движения.
Уровень техники
Известные заявителю аналоги изобретения
Известен патент на способ управления европейской системой управления железнодорожным движением (European Rail Traffic Management System, сокращенно ERTMS), при котором рассчитывается траектория движения (кривая торможения), чем обеспечивается управление характеристиками движения следующего поезда. Эти расчеты предписаны инструкциями ERTMS и содержат чтение и обработку в ЭВМ локомотива координат евробализы (RFID-метки), расположенной на железнодорожном пути, что соответствует классу МПК: B61L 23/34 - Средства управления, предупреждения или аналогичные средства безопасности, указывающие расстояние между транспортными средствами или составами транспортных средств путем передачи сигналов между ними. (Lakot Fransua, Misho Filipp.Train control process and system, especially of the ERTMS type. Germany. Frence. ЕР 1498338 A1. 05.10.2005).
Известный способ использует бализы (изготовлены на основе RFID-метки), расположенные по линии движения поезда и предназначенные для чтения считывателем, установленным на борту движущегося локомотива и средства для ретрансляции по радиосвязи в радиоблок-центр, где определяют местоположение и мгновенную скорость. Результаты вычисления, полученные в радиоблок-центре, позволяют передать в ЭВМ, находящейся на борту следующего поезда, необходимые координаты его местоположения на магистрали, уменьшенные на величину тормозного пути. Аналогичный патент ES 22550956 T3 получен теми же авторами в Испании с приоритетом от 16.04.2006.
Известен патент Германии на Способ работы системы управления поездом, выполненной в виде ETCS более 2-го уровня разработки с путевыми евробализами (RFID-метками), при проезде над которыми локомотива, информация, хранящаяся в бализах (RFID-метках), передается в ЭВМ локомотива, в случае непередачи или неправильной передачи информации с евробализы присваивается идентификационный код этой евробализе (RFID-метке), и данные, относящиеся к виду ошибки передаются через радиоблок-центр по сети GSM-R (глобальную систему мобильной связи на железной дороге), направляются в радиоблок-центр, отвечающий за пройденный участок маршрута, с дополнительным экстренным сообщением, пересылаемым, если это очень важно для безопасности. Неверная информация приводит к экстренному торможению состава. (Apel Norbert, Strahl Jenny. Die Erfindung betrifft ein Verfahren zum Betreiben einer als ETCS (European Train Control System). Germany. DE 102006015318 A. 23.03.2007).
Подобные патенты есть у всех ведущих фирм разработчиков и производителей скоростных локомотивов и автоматики высокоскоростных железных дорог Alstrom, Ansaldo, Bombardier, Invensys, Siemens, Thales.
Наличие ситуации с отсутствием или с искажением информации о координате расположения RFID-метки на высокоскоростной магистрали является возможным, частым и опасным происшествием. Причины искажения информации можно разбить на две группы:
- сбои взаимодействия считывателей (reader) локомотивов с RFID-метками из-за недостатков в широко применяемых системных решениях ERTMS и ETCS и связанная с этими решениями необходимость применения дополнительных и неточных средств измерения скорости и расстояния (доплеровских радаров и тахометров);
- сбои взаимодействия считывателей (reader) локомотивов с RFID-метками из-за климатических, погодных и технических условий эксплуатации RFID-меток и считывателей (reader), входящих в RFID-системы.
Недостатки системных решений ERTMS и ETCS (первая техническая проблема, решение которой обеспечивается при осуществлении или использовании изобретения)
Как правило, недостаточное количество RFID-меток (евробализ) на один километр железнодорожного пути: одна штука на 1,5 км, что можно отнести к системному недостатку. Для определения координат состава между двумя соседними евробализами используют доплеровские радары и тахометры, которые имеют недостатки, в свою очередь:
- при наличии снежного покрова или воды между рельсами радары не измеряют скорость движения локомотива, так как сигнал, отраженный от такой поверхности, имеет малую амплитуду;
- при устройстве пути на гладкой бетонной подушке или эстакаде (без шпал) получается нулевой результат измерений радаром;
- тахометры работают с колесом локомотива, которое буксует и идет юзом при мокрых и обледеневших рельсах, соответственно, в режимах разгона и торможения, что приводит к искажению величины измеряемого расстояния;
- для контроля целостности состава используют вторую кабину поезда, определяют ее координаты при помощи расположенного под ней считывателя (reader) и евробализы. При этом погрешности измерений координат локомотива доплеровскими радарами и тахометрами вносят неопределенность в ответ на вопрос: разорван состав или нет?
Недостатки условий эксплуатации RFID-систем (вторая техническая проблема, решение которой обеспечивается при осуществлении или использовании изобретения)
RFID-метки и считыватели (reader) плохо взаимодействуют (так как поглощается сигнал) в присутствии большого количества металлических деталей. RFID-метки в аналогах устанавливают на шпалы между рельсами, а считыватели (reader) крепится к нижней части локомотива (электровоза) на расстоянии 21 см от уровня головки рельса между металлическими колесами. Бетонные шпалы имеют металлическую арматуру. Таким образом, RFID-метки и считыватели (reader) работают в окружении намагниченного металла со всех сторон, что вносит существенные помехи в их взаимодействие и препятствует ему.
Токи рельсовых цепей и магнитные поля мощных электродвигателей локомотива (электровоза) создают сильные помехи передаче данных от RFID-меток (евробализ).
Пыль и гравий засыпают, осадки заливают евробализы, которые расположены в пространстве между рельсами, что усложняет чтение их содержимого. Механические и пневматические очистители путей отрывают и разрушают евробализы.
Из рассмотренных недостатков приведенных аналогов следует:
- необходимо точно определять координаты состава на протяжении всей высокоскоростной магистрали для обеспечения необходимого уровня безопасности движения, особенно, в районах переездов, на станциях и разъездах;
- необходимо системно изменить условия эксплуатации основных частей RFID-систем и вынести их в более комфортные условия эксплуатации;
- необходимо предложить новые технические решения для повышения надежности измерения координат положения начала и окончания высокоскоростного состава на протяжении всего времени и пути следования состава по магистрали.
Наиболее близкий к изобретению аналог (прототип)
Прототипом изобретения является «Способ определения координат положения подвижного объекта в закрытых помещениях». Слова «в закрытых помещениях» эквивалентны: без приема сигналов спутниковой навигации. В варианте 1 прототипа устанавливают одиночные считыватели (reader) на постоянной высоте на лицевых стойках стеллажей склада, в которые записывают координаты их расположения в местной системе координат склада. Множество считывателей (reader) образует Reader-шкалу. Математическая модель прокладки траекторий движения погрузчиков по складу устанавливается в виде программы на ЭВМ склада, которая работает с цифровым планом склада. В свою очередь, этот план содержит коды всех считывателей (reader). На складском погрузчике устанавливается одну RFID-метку, которую читает ближайший считыватель (reader) и определяют координаты погрузчика в данный момент времени, так как они совпадают с координатами, записанными в читающем считывателе (reader). Эта информация передается на ЭВМ менеджера склада через оптический кабель локальной сети считывателей (reader), из ЭВМ передается по радиоканалу и отображается на дисплее подъемника для его водителя в виде пройденной части маршрута движения.
Прототипом изобретения является «Способ определения координат положения подвижного объекта в закрытых помещениях» (или без приема сигналов спутниковой навигации), при котором (в варианте 2) устанавливают одиночные RFID-метки на постоянной высоте на лицевых стойках стеллажей склада, в которые записывают координаты их расположения в местной системе координат склада. Математическая модель прокладки траекторий движения погрузчиков по складу устанавливается в виде программы на ЭВМ склада, которая работает с цифровым планом склада. В свою очередь, этот план содержит коды всех RFID-меток. На складском погрузчике устанавливается один считыватель (reader), который читает RFID-метки и определяет координаты погрузчика в любой момент времени, так как они совпадают с координатами, которые записаны в читаемой RFID-метке. Эта информация передается на ЭВМ менеджера склада через радио модемы по радиоканалу, затем передается по тому же радиоканалу и отображается на дисплее подъемника для его водителя в виде пройденной части маршрута движения. (Майоров Б.Г. Способ определения координат подвижного объекта в закрытых помещениях. RU 2284542 C2. 30.08.2004).
Достоинство известного решения заключается в определении координат подвижных объектов при отсутствии сигналов спутниковой навигации и возможности многократного чтения координат из RFID-меток, при этом точность зависит от расстояния между соседними RFID-метками и необходимой мощности сигнала считывателя (reader) или от соблюдения принципа близкодействия, подробно: Майоров Б.Г. Способ определения координат подвижного объекта в закрытых помещениях. RU 2540799 C1. 31.07.2013.
Недостатками способов-аналогов и прототипа являются: подверженность воздействию внешних условий: погоде, загрязнению, обледенению, воздействию массива металла и мощных электромагнитных полей, что приводит к недостаточной надежности чтения одиночных RFID-меток или недостаточной надежности измерения координат железнодорожного состава. Основной недостаток заключается в невозможности осуществления повторного или многократного чтения RFID-меток с близкими по величине координатами из-за малого временного интервала (мига) чтения одиночной координаты одной RFID-метки и на большой скорости подвижного объекта (высокоскоростного состава) (Финкенцеллер Клаус.RFID-технологии. Справочное пособие. / Пер. с нем. Сойунханова Н.М. - М.: «Додека-XII», 2010.-496 с). В таком случае воздействие кратковременных и постоянных помех приводит к потере координат или потере контроля высокоскоростного состава. Для устранения этого недостатка предложено вместо взаимодействия одного считывателя и одной RFID-метки осуществлять взаимодействие множества всех считывателей (reader) Reader-шкалы со всеми RFID-метками RFID-шкалы в течение достаточно длительного суммарного интервала времени. Эта возможность обеспечивается операциями над материальными объектами, но имеет важные особенности, так как скорости складского погрузчика в десятки раз (20 км/ч) ниже скорости высокоскоростного состава (400 км/ч). В новом способе контроля высокоскоростного состава введены новые операции с новыми материальными объектами: RFID-шкалами и Reader-шкалами.
Раскрытие сущности изобретения
Предлагаемый способ контроля высокоскоростного состава позволяет повысить надежность определения координат и повысить безопасность движения высокоскоростного состава, так как меньше зависит от внешних погодных условий и технических факторов: воздействия массива металла и сильных электромагнитных полей на работу RFID-меток, устраняются кратковременные, разовые взаимодействия одного считывателя (reader) и одной RFID-метки. Разовые взаимодействия возникают при перемещении считывателя (reader) в составе локомотива (электровоза) на скорости до 400 км/ч относительно неподвижной RFID-метки (евробализы), закрепленной на шпале железнодорожного пути в соответствии с реализацией способов-аналогов. В такой ситуации безопасность пассажиров, грузов и самих составов определяется надежностью определения координат высокоскоростного состава и контролем его целостности.
Целью данного изобретения является повышение надежности и точности определения координат высокоскоростного состава при помощи шкал из считывателей (reader) и шкал из RFID-меток, для чего предложены два варианта способа определения координат положения высокоскоростного состава (варианты). Согласно первого варианта, по которому две RFID-шкалы, включающие M1 и М2 штук RFID-меток, закрепляют, соответственно, в каждой из двух прямолинейных основ с шагом R1, кодам RFID-меток в базе данных ставят в соответствие код состава, порядковый номер в каждой RFID-шкале, первую RFID-шкалу закрепляют на крыше локомотива, вторую на крыше последнего вагона, при этом, меткой с первым номером определяют начало RFID-шкалы и закрепляют его в головной части локомотива, начало второй RFID-шкалы закрепляют в конце последнего вагона, между опорами контактной сети натягивают несущий трос, на опорах и на тросе крепят N считывателей с шагом D1, в память считывателей записывают номера соседних опор контактной сети с линейного цифрового плана участка пути и порядковый номер считывателя, из считывателей на несущем тросе и опор контактной сети составляют первую Reader-шкалу, которую объединяют кабелем в локальную сеть с ЭВМ радиоблок-центра, ЭВМ через мобильную радиосеть типа GSM-R постоянно связывают с ЭВМ локомотива, при перемещении локомотива по участку пути каждым считывателем первой Reader-шкалы считывают коды из всех RFID-меток первой RFID-шкалы, находящихся на крыше локомотива, затем из второй RFID-шкалы, находящихся на крыше последнего вагона состава, передают код состава, номера RFID-меток, номера считывателей первой Reader-шкалы и моменты времени их срабатывания в ЭВМ радиоблок-центра в массиве n=(M1+M2)×N записей линейно-временных координат состава, при этом n=(M1+M2)×N представляет собой количество записей взаимодействия меток локомотива и последнего вагона со считывателями, каждая из записей включает: код состава, порядковый номер считывателя, момент времени его срабатывания, коды опор и порядковые номера RFID-меток, находят m искаженных записей, сравнивают числа m и n, при выполнении условия m≤kn, где коэффициент допустимого числа искажений k<1, определяют координаты поезда в данный момент времени.
Согласно второго варианта, по которому две Reader-шкалы, включающие N1 и N2 штук считывателей, закрепляют, соответственно, в каждой из двух прямолинейных основ с шагом D2 друг от друга, закрепляют вторую Reader-шкалу на крыше локомотива, третью на крыше последнего вагона, в память каждого считывателя записывают код состава и порядковый номер считывателя в каждой Reader-шкале, обе Reader-шкалы объединяют в кабельную локальную сеть с ЭВМ локомотива, через радиостанцию локомотива и мобильную сеть типа GSM-R осуществляют постоянную связь с ЭВМ радиоблок-центра, межу соседними опорами контактной сети натягивают несущий трос, на опорах и на тросе крепят М штук RFID-меток с шагом R2, кодам RFID-меток в базе данных ставят в соответствие коды опор с линейного цифрового плана участка пути и порядковый номер RFID-метки, из этих RFID-меток образуют третью RFID-шкалу, при перемещении локомотива считывателями Reader-шкал читают коды RFID-меток, передают код состава, порядковый номер считывателя, момент времени его срабатывания, коды опор и порядковые номера RFID-меток в ЭВМ локомотива, передают эту информацию через мобильную сеть GSM-R в ЭВМ радиоблок-центра в массиве n=(N1+N2)×M значений линейно-временных координат состава, при этом n=(N1+N2)×M представляет собой количество записей взаимодействия считывателей локомотива и последнего вагона с метками, каждая из записей включает: код состава, порядковый номер считывателя, момент времени его срабатывания, коды опор и порядковые номера RFID-меток, находят m искаженных записей, сравнивают числа m и n, при выполнении условия m≤kn, где коэффициент допустимого числа искажений k<1, определяют координаты поезда, в данный момент времени.
Таким образом, сущность изобретения нового способа заключается в определении положения подвижного состава с точностью равной величине отличия координат расположения двух соседних RFID-меток или считывателей, установленных на элементах объектов высокоскоростной магистрали и ее локомотивов (до долей метра). При этом RFID-метки образуют RFID-шкалу, а считыватели (reader) образуют Reader-шкалу. Шкалы в движении взаимодействуют между собой многократно и применены для определения координат положения высокоскоростного состава.
Надежность определения координат высокоскоростного состава увеличивается за счет многократного чтения близких по величинам координат точек, которые известны заранее, расположены в системе координат поезда и системе координат железной дороги:
- в первом варианте каждым стационарным считывателем (reader) (расположенным в первой Reader-шкале) Считывают коды всех RFID-меток, входящих в первую и вторую RFID-шкалы, которые движутся вместе с составом на большой скорости, каждое из (M1+M2)×N считываний сопровождают фиксацией момента системного времени срабатывания считывателя;
- во втором варианте считывают коды каждой стационарной RFID-метки (расположенной в третьей RFID-шкале) всеми считывателями (reader) с известными координатами, входящими в две Reader-шкалы, которые движутся вместе с составом на большой скорости, каждое из (N1+N2)×M считываний сопровождают фиксацией момента системного времени срабатывания считывателя (reader).
Координаты географического и физического расположения RFID-меток и считывателей (reader) и их внутренние коды объединены в отдельные записи и поступают в реальном времени в базу данных ЭВМ радиоблок-центра в количестве (M1+M2)×N или (N1+N2)×M записей. По поступающим кодам в ЭВМ определяют соответствующие координаты поезда, а совместно с моментами времени прохождения их локомотивом, определяют скорость, ускорение движения состава и вычисляют целостность состава.
Целью данного изобретения является повышение надежности и точности определения координат высокоскоростного состава при помощи шкал из считывателей (reader) и шкал из RFID-меток, что повышает безопасность эксплуатации высокоскоростных поездов.
Рассмотрим свойство, следствием которого является указанный технический эффект.
Рассмотрим отказы в работе или искажение информации при чтении считывателями (reader) (Δ) RFID-меток (R) или событие отказа (Δ&R), как результат повторных испытаний в теории вероятностей и теории ошибок (Бронштейн И.Н., Семендяев К.А. Справочник по математике. М., 1965 г., 608 с.): Если производится п независимых испытаний и при каждом из них вероятность события отказа Δ&R равна р, то вероятность (pm,n) того, что событие отказа Δ&R повторяется m раз, равна:

где  - число сочетаний из n по m;
- число сочетаний из n по m;
 - количество записей в базе данных ЭВМ радиоблок-центра в вариантах 1 и 2 формулы, соответственно;
- количество записей в базе данных ЭВМ радиоблок-центра в вариантах 1 и 2 формулы, соответственно;
Pm,n - максимально допустимое значение вероятности повторного испытания. Вероятность pm,n по выражению (1) будет наибольшей (максимум функции) при выполнении неравенства для аргумента m:

По выражению (1) построена поверхность (см. фиг. 3) зависимостей вероятностей pm,n(m,р) повторных испытаний от количества m событий Δ&R, при общем количестве испытаний n=70. Величина n=70 выбрана из предположения, что N=10, M1=4, М2=3 (в варианте станционного применения способа). Выберем величину вероятности события отказа Δ&R р=0,15 на фиг. 3 в начале устоявшегося участка поверхности (на практике должна выбираться обоснованно из статистики отказов пар Δ&R конкретных марок). Из выражения (2) находим неравенство 9,65≤m<10,65, так как m-число отказов целое число, округляем: m=11. Подставим n=70, m=11 в выражение (1), получим Pm,n=0,126.
Из характера поверхности на фиг. 3 следует:
- при выборе нулевой вероятности р=0 события Δ&R, его повторы находятся в диапазоне 1≤m≤2 с вероятностью pm,n=0,35, что указывает на недостаток аналогов: наблюдается большая вероятность нарушений чтения и искажения информации при взаимодействии одиночных пар считывателей (reader) и RFID-меток в аналогах;
- при вероятности события Δ&R р=0,15, m=11 из общего числа испытаний n=70, k=m/n≤0,157. При этих условиях количество отказов от результатов совместной работы или чтения RFID-меток считывателями (reader) (событие отказ - A&R) уменьшится в n/m>6,364 раза.
Эти примеры указывают на теоретически обоснованное увеличение надежности определения координат высокоскоростного состава в процессе его перемещения, по сравнению с рассмотренными выше аналогами, в которых происходит одноразовое взаимодействие RFID-меток со считывателями (reader) или n=1. Соответственно, точность определения координат высокоскоростного состава, как и количество точек измерения координат, например, (70:1=70) высокоскоростного состава увеличится в 70 раз на расстоянии в 70 метров между опорами контактной станционной сети.
Для устранения влияния внешних погодных условий и технических факторов RFID-шкалы и Reader-шкалы предложено устанавливать в верхней зоне Габарита приближения строений С400 на крыше локомотива и последнего вагона состава. Такая возможность следует из Специальных технических условий на проектирование участка Москва-Казань высокоскоростной железнодорожной магистрали Москва-Казань-Екатеринбург со скоростями движения до 400 км/ч. Изменение №2. Раздел 14. Железнодорожное электроснабжение. СПб: 2017 г. ПГУПС.93 с. (далее обозначим СТУ ЖМ Москва-Казань-Екатеринбург). Мобильные RFID-шкалы и Reader-шкалы, установленные на высокоскоростном составе, взаимодействуют со считывателями (reader) и RFID-метками, которые закреплены на несущих тросах между опорами контактной сети и образуют стационарные RFID-шкалы и Reader-шкалы с минимальной длиной шкалы в 70 м. Это освобождает от нежелательного влияния осадков, влияния больших масс металла и электро-магнитных полей, и механических повреждений.
Краткое описание чертежей
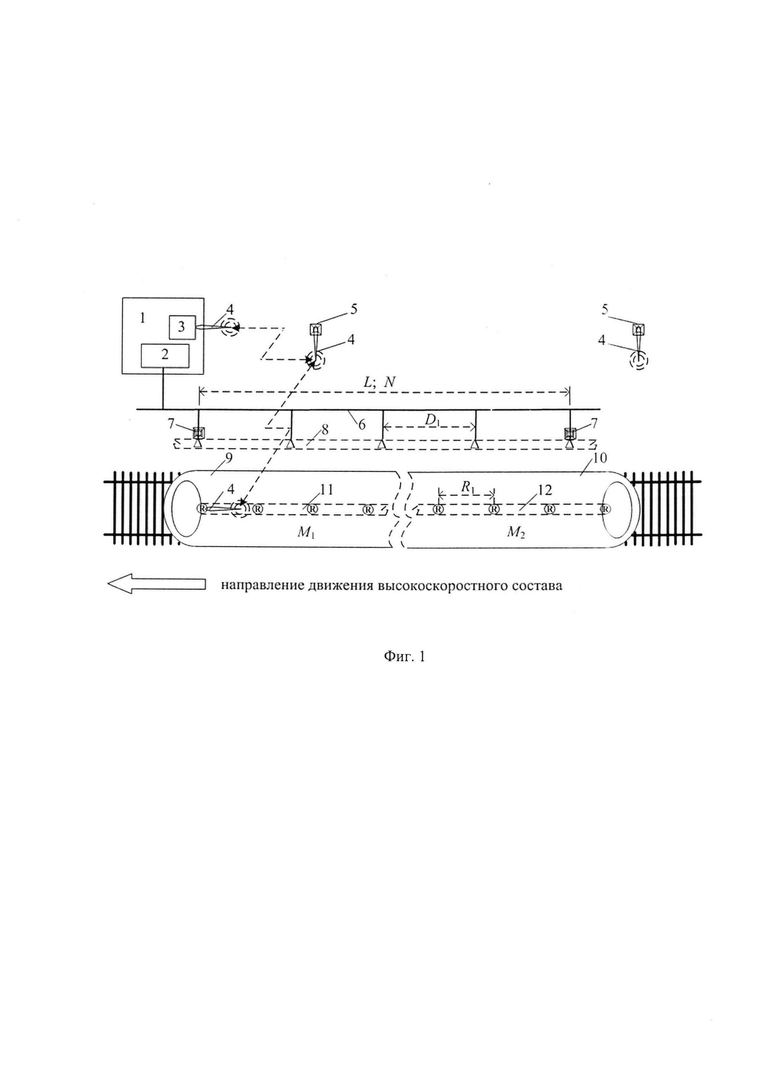
На фиг. 1 изображен условно вид сверху на высокоскоростной состав и основное оборудование контроля его движения, выполненные по варианту 1 способа контроля высокоскоростного состава (варианты), обозначены: радиоблок-центр 1, ЭВМ 2 радиоблок-центра 1, приемо-передатчик 3 сети GSM-R, антенна 4 мобильной сети GSM-R, опора 5 сети GSM-R, оптическая локальная сеть 6, опора 7 контактной сети, первая 8 Reader-шкала, локомотив 9, последний вагон 10 поезда, первая 11 RFID-шкала, вторая 12 RFID-шкала, L-расстояние между соседними опорами контактной сети, N-количество считывателей (reader) и D1-расстояние между соседними считывателями (reader) первой 8 Reader-шкалы, R1-расстояние между соседними RFID-метками первой 11 и второй 12 RFID-шкал, M1 и М2 - соответственно, количество RFID-меток в этих RFID-шкалах.
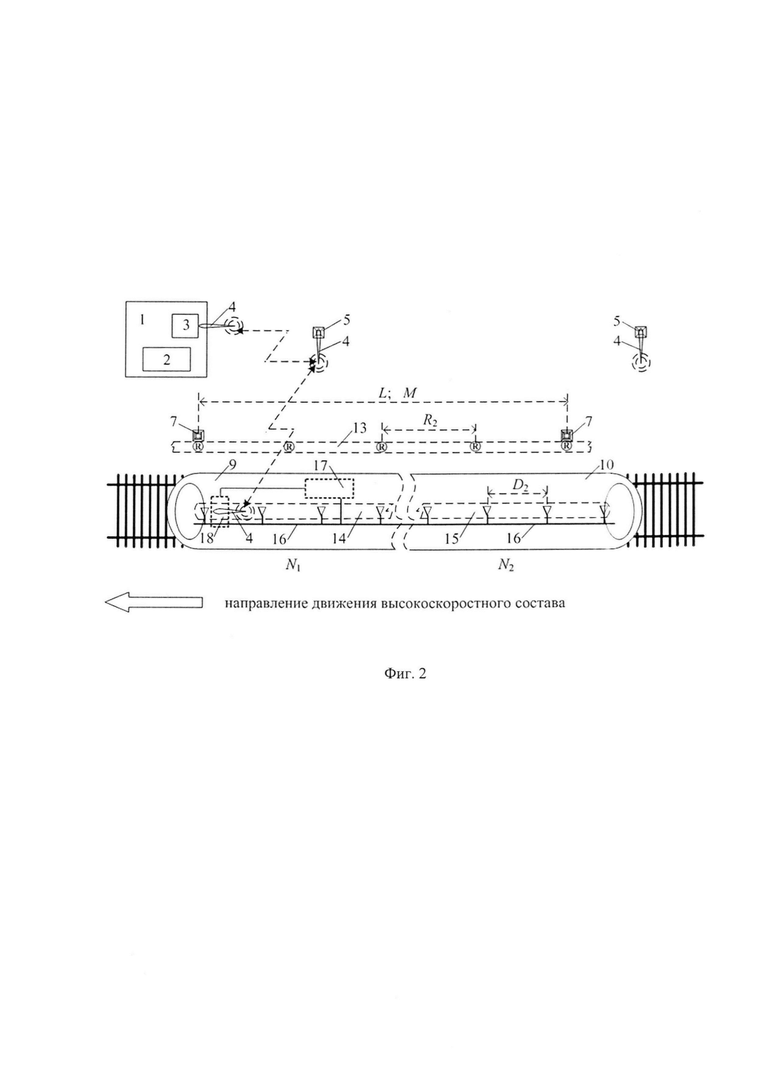
На фиг. 2 изображен условно вид сверху на высокоскоростной состав и основное оборудование контроля его движения, выполненные по варианту 2 способа контроля высокоскоростного состава (варианты), обозначены: третья 13 RFID-шкала, вторая 14 и третья 15 Reader-шкалы, N1 и N2, соответственно, количество считывателей (reader) в этих Reader-шкалах, локальная сеть 16 поезда, ЭВМ 17 локомотива, радиостанция 18 GSM-R локомотива, D2-расстояние между соседними считывателями (reader) второй 14 и третьей 15 Reader-шкал, М-количество RFID-меток и R2-расстояние между соседними RFID-метками третьей 13 RFID-шкалы.
На фиг. 3 изображены зависимости вероятностей pm,n повторных испытаний от количества m этих повторов событий Δ&R и величины вероятности разового события р при общем количестве испытаний n.
Осуществление изобретения
Некоторые особенности устройства высокоскоростной магистрали, благоприятные для реализации изобретения, используем для описания осуществления изобретения. Особенности отражены в документе СТУ ЖМ Москва-Казань-Екатеринбург. Приведем несколько пунктов из СТУ, которые важны для осуществления изобретения:
- 4.6. Габаритные расстояния до прирельсовых объектов в области расположения и функционирования токоприемника изображены на рис. 4.1 - Габарит приближения строений С400 и составляет (3600×2400) мм на высоте 5500 мм.
- 14.4.2. Максимальная длина пролетов контактной сети не должна превышать 70 м.
- 14.4.4. Рабочая высота полоза токоприемника при движении электроподвижного состава по участкам высокоскоростной магистрали со скоростью выше 200 км/ч и до 400 км/ч должна находиться в диапазоне от 5570 мм до 6200 мм от уровня головки рельсов. Минимальный уровень положения полоза от крыши локомотива составляет 1270 мм.
- 14.4.6. Расстояние между двумя рабочими токоприемниками электроподвижного состава не менее 150 м и не более 400 м.
- 16.2.3. Подвижной состав любого типа, эксплуатируемый на высокоскоростной магистрали, должен быть оснащен средствами радиосвязи: радиостанциями диапазона 900 МГц (стандарт GSM-R) и диапазона 160 МГц (стандарта DMR).
Возможности осуществления способа определяются тем, что по сравнению с аналогом патентом RU 2284542 C2 Способ определения координат положения подвижного объекта в закрытых помещениях, (автор Майоров Б.Г.), вводятся новые объекты: Reader-шкалы и RFID-шкалы и используются в осуществлении нового способа, причем в вариантах 1 и 2 реализации используют три Reader-шкалы 8, 14, 15 и три RFID-шкалы 11, 12, 13, что позволяет повысить надежность и точность определения координат высокоскоростного состава при его перемещении с большой скоростью.
RFID-шкала реализуется на RFID-метках, поэтому приведем принцип взаимодействия считывателя (reader) и RFID-меток: «Пассивные RFID-метки не имеют встроенного источника энергии. Электрический ток, индуцированный в антенне RFID-метки электромагнитным сигналом от считывателя, обеспечивает достаточную мощность для функционирования кремниевого CMOS-чипа, размещенного в метке, и передачи ответного сигнала» (Сандип Лахири. RFID. Руководство по внедрению. The RFID Sourcebook / Дудников С. - Москва: Кудиц-Пресс, 2007. - 312 с.).
«Пассивные метки УВЧ и СВЧ диапазонов (860÷960 МГц и 2,4÷2,5 ГГц) передают сигнал методом модуляции отраженного сигнала несущей частоты (Backscattering Modulation). Антенна считывателя излучает сигнал несущей частоты и принимает отраженный от метки модулированный сигнал. Пассивные метки ВЧ диапазона передают сигнал методом модуляции нагрузки сигнала несущей частоты (Load Modulation). Каждая метка имеет идентификационный номер. Пассивные метки могут содержать перезаписываемую энергонезависимую память EEPROM-типа. Дальность действия меток составляет 1÷200 см (ВЧ-метки) и 1÷10 метров (УВЧ и СВЧ-метки). См. Dobkin D.M. RFID Basics: Backscatter Radio Links and Link Budgets. The RF in RFID: Passive UHF RFID in Practice. 2007. Сайт www.rfdesignline.com. Обязательное наличие электроэнергии на опорах контактной сети и в локомотивах (см. СТУ ЖМ Москва-Казань-Екатеринбург) позволяет рассматривать и применять активные метки наряду с пассивными метками, например, подобные паре: считыватель PR-C07.N и активная метка ActiveTag.I2, с рабочей температурой от -40 до +55°С и расстоянием чтения от 5 до 50 м. Сайт www.ti-rfid.com. Эта информация подтверждает практическую аппаратную обеспеченность (реализуемость) способа-прототипа предлагаемого способа за счет широкого применения пассивных и активных меток УВЧ и СВЧ диапазонов и их крупносерийного производства. Конструктивно они изготавливаются в виде малогабаритных микросхем менее (0,5×0,5 мм), защищенных корпусом от воздействия низких и высоких температур, с необходимой химической стойкостью. В каждую RFTD-метку при ее изготовлении записывается уникальный идентификационный номер (код). Отличительной особенностью способа-прототипа является отсутствие соответствия этого идентификационного номера традиционному описанию объекта (предмета) учета или контроля для поиска его принадлежности или его технических характеристик в базе данных ЭВМ информационно-измерительной системы. В известном применении RFID-меток (или в способе-прототипе) идентификационному номеру пассивной RFID-метки соответствуют в базе данных ЭВМ склада координаты постоянного положения этой метки в системе координат склада. Это позволяет автоматически ориентировать погрузчики склада при их передвижении по складу, путем чтения координат из ряда RFID-меток, закрепленных в полу склада при помощи reader (считывателя), который закреплен на погрузчике. Этот ряд RFID-меток подобен RFID-шкале (11, 12, 13), а одиночный считыватель (reader) подобен Reader-шкале (8, 14, 15), так как при малой скорости передвижения погрузчика (20 км/ч << 400, км/ч) обеспечивается достаточная надежность взаимодействия одиночного считывателя (reader) с многими RFID-метками.
Рассмотрим последовательность действий над материальными объектами и условия их проведения в порядке упоминания их в варианте 1 формулы изобретения:
«…изготавливают первую и вторую RFID-шкалы, для этого М1 и М2 штук RFID-меток закрепляют, соответственно, в каждой из двух прямолинейных основ с шагом R1, …». Предложено расширить круг новых применений RFID-меток. Метки объединяют информационно в первую 11 и вторую 12 RFID-шкалы, идентификационным номерам RFID-меток ставится в соответствие в базе данных ЭВМ 2 радиоблок-центра 1 координаты положения этих меток в системе координат локомотива 9 и последнего вагона 10 поезда, изображенного на фиг. 1 (вариант 1 формулы). Физически RFID-метки объединяют в две конструкции - первую 11 RFID-шкалу для локомотива 9 и вторую 12 RFID-шкалу для последнего вагона 10 поезда. На не растягиваемом шнуре закрепляют с шагом R1 пассивные RFID-метки в количестве M1 штук, шнур помещают в пластмассовый не скручиваемый шланг, концы которого герметизируют, получают первую 11 RFID-шкалу. Аналогично изготавливают вторую 12 RFID-шкалу с количеством меток М2 штук.
«…первую RFID-шкалу закрепляют на крыше локомотива, вторую на крыше последнего вагона, при этом, меткой с первым номером определяют начало RFID-шкалы и закрепляют его в головной части локомотива, начало второй RFID-шкалы закрепляют в конце последнего вагона,…» при этом замеряют и записывают полученный установочный размер расстояния от первой метки до начала передней части локомотива 9 в базе данных ЭВМ 2 радиоблок-центра 1. Аналогичные операции осуществляют при установке второй RFID-шкалы на крыше последнего вагона 10.
«…между опорами контактной сети натягивают несущий трос, на опорах и на тросе крепят N считывателей (reader) с шагом D1, в память считывателей (reader) записывают номера соседних опор контактной сети с линейного цифрового плана участка пути и порядковый номер считывателя (reader), из считывателей (reader) на несущем тросе и опор контактной сети составляют первую Reader-шкалу, которую объединяют кабелем в локальную сеть с ЭВМ радиоблок-центра,…». В простейшем случае первая 8 Reader-шкала может состоять из считывателей (reader), закрепленных непосредственно только на опорах контактной сети. Высокоскостные поезда следуют по магистральным линиям, как правило, на максимальной скорости 400 км/ч, расстояние между соседними опорами в 70 м проходят за 0,63 секунды. Средний тормозной путь составляет 1500 метров, который поезд должен осуществить при экстренном торможении в течение от 2 до 3 минут или через временной интервал движения попутных поездов. (Цикл лекций президента «Сименс» в России Дитриха Меллера. Высокоскоростное железнодорожное движение. НГУПС (МИИТ). 20.12.2013. Поиск: Dr_Moeller_MIIT_Lecture_4.pdf). На траектории торможения будет пройдено 1500:70=21,43 штук отметок Reader-шкалы, закрепленных на опорах контактной сети, что вполне достаточно для контроля процесса остановки состава.
На станциях, при осуществлении станционных остановок и станционного маневрирования, необходимо определять координаты головы и хвоста высокоскостного состава с точностью до долей метра. В связи с этим требованием реализация варианта 1 формулы требует установки существенно более 70 штук считывателей (reader) межу опорами контактной сети. Стоимость одного считывателя (reader) приблизительно на два или три порядка выше стоимости одной RFID-метки. Например: UHF RFID ридер с интегрированной антенной Hopeland HZ 120 стоит 65280,0 рублей. UHF RFID метка Hidden AZ-9654 стоит 11,7 рублей. Сайт: www.ti-rfid.com. Очевидна выгода реализации варианта 2 формулы. В варианте 2 вдоль магистрального пути на опорах контактной сети можно расположить по одной RFID-метке или создать редкую RFID-шкалу 13. Вдоль станционных путей, перед переездами, разъездами можно установить частую RFID-шкалу 13 с шагом менее метра. Reader-шкалы 14 и 15 для различных участков высокоскоростной магистрали устанавливаются на скоростном или маневровом локомотиве совершенно с одинаковым (малым и достаточным: менее 10) количеством считывателей (reader).
Примечание: Следует заметить, что стоимость одной Eurobalise S21 фирмы Сименс, основным элементом которой является RFID-метка, составляет около 30000 долларов при стоимости UHF RFID метки Hidden AZ-9654 в 11,7 рублей. Из этого парадоксального соотношения цен следует необходимость создания и производства отечественных систем контроля высокоскоростных поездов.
«…первую Reader-шкалу, которую объединяют кабелем в локальную сеть с ЭВМ радиоблок-центра,…». Сетевые контроллеры каждого из N считывателей (reader) с шагом Di в первой 8 Reader-шкале через сетевые устройства связывают оптическим кабелем с контроллером сети ЭВМ 2 радиоблок-центра 1. Оптическая сеть прокладывается в районе железнодорожного полотна, поэтому подвержена нежелательным механическим воздействиям и требуется обеспечение защиты оптических линий за счет усложнения конструкции. Кроме этого каждый из N считывателей (reader) имеет габаритные размеры больше, чем RFID-метка, что создает парусность, ветровую нагрузку и нагрузку от осадков на несущий трос. Поэтому рационально первую 8 Reader-шкалу использовать только для магистральных участков высокоскоростной железной дороги и только на опорах контактной сети крепить считыватели. Можно использовать вариант 2 формулы на всей протяженности железной дороги, включая станции. В этом варианте вторую 14 и третью 15 Reader-шкалы устанавливать, соответственно, на локомотиве 9 и на последнем вагоне 10. Точность определения координат состава будет зависеть от надежности чтения RFID-меток третьей 13 RFID-шкалы считывателями второй 14 и третьей 15 Reader-шкалы и количеством этих RFID-меток в третьей 13 RFID-шкале.
Если создать малогабаритные и дешевые считыватели (reader) в монолитном исполнении, то возможно эквивалентное использование вариантов 1 и 2 формулы способа. Таким образом, вариант 2 формулы способа является более универсальным при его осуществлении, чем вариант 1, поэтому рассмотрим его подробнее:
«…изготавливают вторую и третью линейные Reader-шкалы из, соответственно, N1 и N2 штук считывателей, расположенных с шагом D2 друг от друга, в память каждого считывателя записывают код состава и порядковый номер считывателя в каждой Reader-шкале, закрепляют вторую шкалу на крыше локомотива, третью на крыше последнего вагона, обе Reader-шкалы объединяют в кабельную локальную сеть с ЭВМ локомотива, через радиостанцию локомотива и мобильную сеть типа GSM-R осуществляют постоянную связь с ЭВМ радиоблок-центра…». Конструкция второй 14 и третьей 15 Reader-шкал отличается от конструкции первой 11 и второй 12 RFID-шкал 11 и состоит из отдельных считывателей (reader), которые размещают в количестве N1 и N2 штук считывателей (reader) на расстоянии D2 друг от друга, соосно, соответственно, на крышах локомотива 9 и последнего вагона 10. Обе Reader-шкалы 14 и 15 объединяют в кабельную локальную сеть 16 с ЭВМ 17 локомотива 9, что позволяет в реальном времени считывать М кодов третьей 13 RFID-шкалы и передавать через ЭВМ 17 локомотива 9, радиостанцию 18 GSM-R локомотива 9 эти коды в ЭВМ 2 радиоблок-центра 1. Передают информацию: код состава, порядковый номер считывателя (reader), момент времени его срабатывания, коды опор и порядковые номера RFID-меток. Эти данные образуют массив n=(N1+N2)×M кодов значений линейно-временных координат состава. Этот массив через радиостанцию 18 локомотива 9 и мобильную сеть типа GSM-R постоянно передают в ЭВМ 2 радиоблок-центра 1.
«…определяют координаты локомотива и последнего вагона состава, скорость и целостность поезда в данный момент времени…». Массив n=(N1+N2)×M значений кодов линейно-временных координат состава обрабатывают в ЭВМ 2 радиоблок-центра 1 (вариант 2 формулы). При этом в базе данных хранят и используют числовые значения величин: n, р, Pm,n, которые входят в выражение (1) и позволяют определять технические аспекты надежности или безошибочного взаимодействия (N1+N2) штук считывателей (reader) данного локомотива 9 и последнего вагона 10 с (М) штуками RFID-меток данного участка пути. Определяется число m искаженных взаимодействий (Δ&R) из массива n=(N1+N2)×M значений. По выражению (1) находится вероятность pm,n и, если выполняется неравенство pm,n<Pm,n, то оставшиеся (n-m) записи принимают, как верные и одинаковые. В качестве примера рассмотрим дальнейшее и полезное использование полученных координат: определим мгновенную скорость перемещения состава:

где Li,j, Li+1,j - линейные координаты расположения i-ой и (i+1)-ой RFID-меток, соответственно, прочитанные последовательно j-ым считывателем (reader);
Tj,j, Ti+1, j - моменты времени чтения i-ой и (i+1)-ой RFID-меток, соответственно, прочитанных последовательно j-ым считывателем (reader);
i=1, 2,…, М; i+1≤М; j=1, 2, …, (N1+N2) для (n-m) верных записей из этих множеств.
Например, определим целостность состава, как условие выполнения неравенства:

Vi,l - мгновенная скорость (3) перемещения состава;
где Ti,j, Ti,e - моменты времени чтения i-ой RFID-метки, соответственно, последовательно j-ым и е-ым считывателями (reader);
i=1, 2, …, М; j=1, 2,…, N1; е=1, 2, …, N2 для (n-m) верных записей из этих множеств;
Lсостава=const - длина состава в статическом, целом состоянии.
Для полноты процесса управления и соблюдения подобия на последних этапах управления отработанным практически методикам European Rail Traffic Management System (ERTMS) (не имеют новизны) для поправок результатов расчета по новым выражениям (3, 4) вводят отечественные поправочные коэффициенты. Эти коэффициенты учитывают погодные условия, техническое состояние пути, уклон пути, параметры движения предыдущего состава. Определяют известные и новые кривые торможения (Цикл лекций президента компании «Сименс» в России Дитриха Меллера. Высокоскоростное железнодорожное движение. НГУПС (МИИТ). 20.12.2013. Поиск: Dr_Mocller_MIIT_Lecture_4.pdf или Майоров Б.Г. Применение гармонических полуволн для автоматизации управления высокоскоростными поездами. Информатика и автоматизация (Труды СПИИРАН). 2023. №6. Поиск: Web: http://ia.speras. После определения координат состава и учета поправочных коэффициентов определяют необходимую скорость движения. По мобильной радиосети GSM-R задают описываемому локомотиву разрешенную скорость в данный момент времени, тем самым контролируют и управляют этим высокоскоростным составом в процессе следования его по данному участку высокоскоростной магистрали, что способствует увеличению безопасности движения на высокоскоростных магистралях.

Изобретение относится к автоматике и телемеханике. В способе определения координат положения высокоскоростного состава закрепляют RFID-метки и Reader-метки как на поезде, так и на опорах контактной сети. Зная координаты расположений опор контактной сети, определяют местоположение проходящего мимо них высокоскоростного состава, путем взаимодействия RFID-считывателей и меток. Повышается надежность определения местоположения высокоскоростного состава. 2 н.п. ф-лы, 3 ил.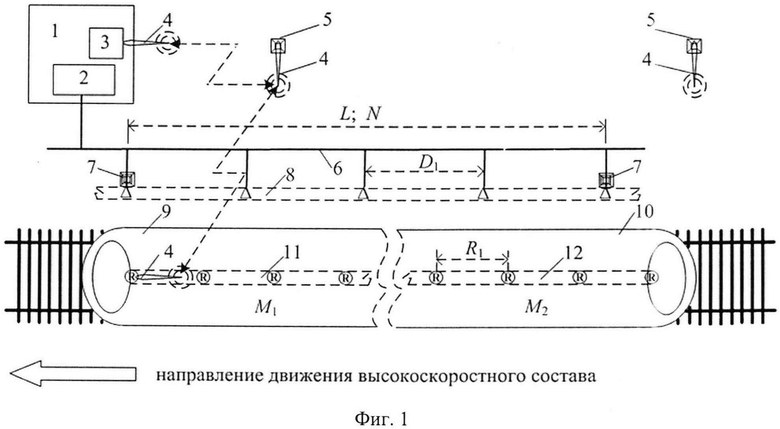
1. Способ определения координат положения высокоскоростного состава, согласно которому две RFID-шкалы, включающие M1 и М2 штук RFID-меток, закрепляют, соответственно, в каждой из двух прямолинейных основ с шагом R1, кодам RFID-меток в базе данных ставят в соответствие код состава, порядковый номер в каждой RFID-шкале, первую RFID-шкалу закрепляют на крыше локомотива, вторую на крыше последнего вагона, при этом меткой с первым номером определяют начало RFID-шкалы и закрепляют его в головной части локомотива, начало второй RFID-шкалы закрепляют в конце последнего вагона, между опорами контактной сети натягивают несущий трос, на опорах и на тросе крепят N считывателей с шагом D1, в память считывателей записывают номера соседних опор контактной сети с линейного цифрового плана участка пути и порядковый номер считывателя, из считывателей на несущем тросе и опор контактной сети составляют первую Reader-шкалу, которую объединяют кабелем в локальную сеть с ЭВМ радиоблок-центра, ЭВМ через мобильную радиосеть типа GSM-R постоянно связывают с ЭВМ локомотива, при перемещении локомотива по участку пути каждым считывателем первой Reader-шкалы считывают коды из всех RFID-меток первой RFID-шкалы, находящихся на крыше локомотива, затем из второй RFID-шкалы, находящихся на крыше последнего вагона состава, передают код состава, номера RFID-меток, номера считывателей первой Reader-шкалы и моменты времени их срабатывания в ЭВМ радиоблок-центра в массиве n=(M1+M2)×N записей линейно-временных координат состава, при этом n=(M1+M2)×N представляет собой количество записей взаимодействия меток локомотива и последнего вагона со считывателями, каждая из записей включает: код состава, порядковый номер считывателя, момент времени его срабатывания, коды опор и порядковые номера RFID-меток, находят m искаженных записей, сравнивают числа тип, при выполнении условия m≤kn, где коэффициент допустимого числа искажений k<1, определяют координаты поезда в данный момент времени.
2. Способ определения координат положения высокоскоростного состава, согласно которому две Reader-шкалы, включающие N1 и N2 штук считывателей, закрепляют, соответственно, в каждой из двух прямолинейных основ с шагом D2 друг от друга, закрепляют вторую Reader-шкалу на крыше локомотива, третью на крыше последнего вагона, в память каждого считывателя записывают код состава и порядковый номер считывателя в каждой Reader-шкале, обе Reader-шкалы объединяют в кабельную локальную сеть с ЭВМ локомотива, через радиостанцию локомотива и мобильную сеть типа GSM-R осуществляют постоянную связь с ЭВМ радиоблок-центра, межу соседними опорами контактной сети натягивают несущий трос, на опорах и на тросе крепят М штук RFID-меток с шагом R2, кодам RFID-меток в базе данных ставят в соответствие коды опор с линейного цифрового плана участка пути и порядковый номер RFID-метки, из этих RFID-меток образуют третью RFID-шкалу, при перемещении локомотива считывателями Reader-шкал читают коды RFID-меток, передают код состава, порядковый номер считывателя, момент времени его срабатывания, коды опор и порядковые номера RFID-меток в ЭВМ локомотива, передают эту информацию через мобильную сеть GSM-R в ЭВМ радиоблок-центра в массиве n=(N1+N2)×M значений линейно-временных координат состава, при этом n=(N1+N2)×M представляет собой количество записей взаимодействия считывателей локомотива и последнего вагона с метками, каждая из записей включает: код состава, порядковый номер считывателя, момент времени его срабатывания, коды опор и порядковые номера RFID-меток, находят m искаженных записей, сравнивают числа тип, при выполнении условия m≤kn, где коэффициент допустимого числа искажений k<1, определяют координаты поезда, в данный момент времени, тем самым контролируют и управляют этим высокоскоростным составом в процессе следования его по данному участку высокоскоростной магистрали.
| Система определения местоположения железнодорожного подвижного состава | 2018 |
|
RU2698498C1 |
| Устройство для контроля проследования поезда в полном составе | 2019 |
|
RU2702370C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ПОДВИЖНОГО СОСТАВА НА МНОГОПУТНЫХ УЧАСТКАХ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2314956C2 |
| УСТРОЙСТВО СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2012 |
|
RU2506186C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УЧЕТА ВАГОНООБОРОТА | 2011 |
|
RU2500562C2 |
| US 20180222505 A1, 09.08.2018 | |||
| CN 102139704 A, 03.08.2011. | |||

