Изобретение относится к области двумерных телевизионных следящих систем, а именно к телевизионным прицельным системам.
Известно устройство для автоматического сопровождения объекта слежения с двумя независимыми идентичными каналами вычисления рассогласований UΔy и UΔz, состоящее из видеоусилителя, порогового устройства, генератора стандартных импульсов, линии задержки, блока записи, блока памяти эталонного изображения, четырех умножителей, умножающих текущее изображение с эталоном, сдвинутым на ±τ по строке и на ±Т по кадру, четырех фильтров, двух вычитателей и двух усилителей с автоматической регулировкой усиления, при этом аналоговый вход видеоусилителя является входом устройства, входом порогового устройства является выход видеоусилителя, входом генератора стандартных импульсов является выход порогового устройства, входом линии задержки является выход генератора стандартных импульсов, на вход блока управления поступают синхронизирующие импульсы, входами блока записи являются выход блока управления и первый выход линии задержки, входом блока памяти эталонного изображения является выход блока записи, первыми входами первого, второго, третьего и четвертого умножителей являются соответствующие выходы блока памяти эталонного изображения и вторыми входами - второй выход линии задержки, входами первого, второго, третьего и четвертого фильтров низких частот являются выходы первого, второго, третьего и четвертого умножителей соответственно, входами первого вычитателя являются выходы первого и второго фильтров низких частот, входами второго вычитателя - выходы третьего и четвертого фильтров низких частот, входами первого и второго усилителей с автоматической регулировкой усиления являются выходы первого и второго вычитателей соответственно, выходы усилителей с автоматической регулировкой усиления являются выходами устройства, сигналы с которых поступают на приводы следящей системы для устранения рассогласования [1].
Параметр τ - длина импульса, формируемого генератором стандартных импульсов, является постоянной величиной и правильно учитывается разностной схемой, поэтому пеленгационная характеристика (дифференциальная корреляционная функция) в канале Z является линейной и рассогласование вычисляется без ошибок. Линейная пеленгационная характеристика (дифференциальная корреляционная функция Kдиф(τ)) в канале Y (фиг.2.б, поз.6) имеет место только при равенстве длины Т пакета импульсов растрового изображения контура объекта слежения гипотетическому значению T0.
Недостатком известного устройства является ошибка в определении величины рассогласования по каналу Y, возникающая вследствие гипотезы о постоянстве параметра Т - длины пакета импульсов растрового изображения поперек строк - по каналу Y. Реально параметр Т изменяется в зависимости от угла у наклона контура объекта слежения к телевизионной строке (фиг.4). Пренебрежение изменением параметра Т длины пакета импульсов и дальнейший сдвиг эталонов по кадру на фиксированное гипотетическое значение Т0 может привести к несоответствию реальной пеленгационной характеристики гипотетической (линейной) и, как следствие, к неправильному определению величины рассогласования по кадру (оси Y). При длине пакета импульсов меньше гипотетического Т1<Т0 (фиг.4.а) в реальной пеленгационной характеристике появляется зона нечувствительности (фиг.2.а, поз.6). При превышении реальной длины пакета импульсов T2 гипотетического значения Т0 (фиг.4.в) пеленгационная характеристика имеет кусочно-непрерывный вид (фиг.2.в, поз.6).
Технической задачей изобретения является учет изменения параметра Т длины пакета импульсов при формировании сдвинутых по каналу Y эталонов изображения, что позволит получать линейную пеленгационную характеристику по каналу Y.
Решение технической задачи изобретения заключается в том, что в устройстве для автоматического сопровождения объекта слежения, содержащем видеоусилитель, аналоговый вход которого является входом устройства, пороговое устройство, входом которого является выход видеоусилителя, генератор стандартных импульсов, входом которого является выход порогового устройства, линию задержки, входом которой является выход генератора стандартных импульсов, блок управления, на вход которого поступают синхронизирующие импульсы, блок записи, входами которого являются выход блока управления, по командам которого производится перезапись эталонного изображения, и первый выход линии задержки, блок памяти эталонного изображения, выполненный с возможностью формирования сдвинутых на фиксированные величины ±T и ±τ эталонов изображения по каналам Y и Z соответственно, где параметр Т - длина пакета импульсов эталонного изображения по каналу Y, а параметр τ - длина импульса по каналу Z, формируемого генератором стандартных импульсов, входом которого является выход блока записи, первый, второй, третий и четвертый умножители, первыми входами которых являются соответствующие выходы блока памяти эталонного изображения и вторыми входами - второй выход линии задержки, первый, второй, третий и четвертый фильтры низких частот, входами которых являются выходы первого, второго, третьего и четвертого умножителей соответственно, первый и второй вычитатели, входами первого вычитателя являются выходы первого и второго фильтров низких частот, входами второго вычитателя - выходы третьего и четвертого фильтров низких частот, первый и второй усилители с автоматической регулировкой усиления, входами которых являются выходы первого и второго вычитателей соответственно, выходы усилителей с автоматической регулировкой усиления являются выходами устройства, сигналы с которых поступают на приводы следящей системы для устранения рассогласования, дополнительно имеется блок измерения параметра Т - длины пакета импульсов эталонного изображения по каналу Y, вход которого соединен с выходом блока записи, а выходом является второй вход блока памяти эталонного изображения, выполненный с возможностью формирования сдвинутых эталонов изображения по каналу Y на изменяемую величину ±T.
Существенным отличительным признаком, отраженным в формуле изобретения, является элемент устройства - блок измерения параметра Т (длины пакета импульсов эталонного изображения поперек строк).
Технический результат изобретения достигнут за счет учета изменения параметра Т - длины пакета импульсов эталонного изображения поперек строк за счет использования нового блока и новых связей в схеме устройства.
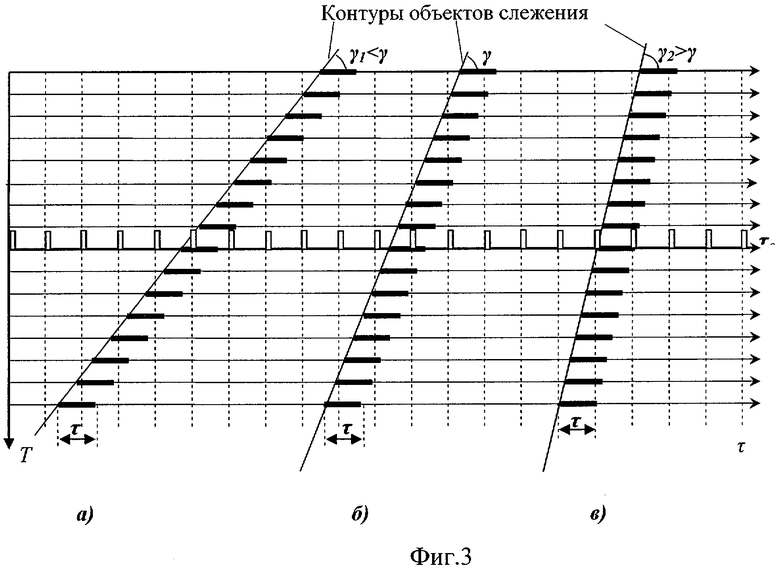
Структурная схема системы слежения представлена на фиг.1; на фиг.2 - графики, иллюстрирующие формирование пеленгационной характеристики следящей системы по каналу Y; на фиг.3 - развертка телевизионного сигнала, снимаемого с генератора стандартных импульсов; на фиг.4 - развертка телевизионного сигнала после квантования по времени, снимаемого с линии задержки.
Описание устройства.
Видеосигнал с видикона поступает на видеоусилитель 1 и далее на пороговое устройство 2, с порогового устройства бинарное изображение поступает на генератор стандартных импульсов 3; приведенное к импульсам одинаковой длительности контурное изображение подается на линию задержки 4, откуда поступает в блок записи 5 и на четыре умножителя 9, 10, 11, 12; блок записи 5 по командам блока управления 6 периодически выдает изображение для перезаписи эталона в блок памяти 8 и в блок измерения параметра Т 7 для определения длины пакета импульсов по каналу Y, который подается в блок памяти 8 и учитывается при формировании сдвинутых эталонных изображений по каналу Y; в четырех умножителях 9, 10, 11, 12 сдвинутые на величины ±Т и ±τ опорные изображения умножаются на текущее изображение, поступающее с линии задержки 4; результаты умножения интегрируются в фильтрах низких частот 13, 14, 15, 16 и подаются на вычитатели 17, 18, с которых сигнал, пропорциональный сдвигу текущего изображения относительно эталонного, поступает на усилители с автоматической регулировкой усиления 19, 20 и далее на привод следящей системы для устранения рассогласования.
Устройство работает следующим образом. Видеосигнал с видикона через видеоусилитель 1 поступает на пороговое устройство 2, на выходе которого формируется бинарный сигнал: единица, если видеосигнал больше порогового значения, нуль, если меньше. С выхода порогового устройства 2 бинаризированное изображение объекта слежения подается на генератор стандартных импульсов 3, на выходе которого формируются импульсы с одинаковой длительностью τ, равной периоду следования синхронизирующих импульсов. В результате формируется контур объекта слежения (фиг.3). Линия задержки τu/2 4 компенсирует систематический сдвиг кадра памяти за счет квантования по времени, кроме того, логическим умножением импульсов контура объекта слежения и синхронизирующих импульсов производится оцифровывание изображения (фиг.4). В результате изображение fmeк(t) получается с растровыми искажениями в виде пакетов импульсов с постоянной шириной τ и переменной длиной Т, зависящей от угла наклона γ контура объекта слежения к телевизионной строке. Блок записи 5 по командам блока управления 6 периодически производит перезапись эталонного изображения. С выхода блока записи 5 изображение в виде массива нулей и единиц поступает в блок памяти 8, где хранится в виде опорного (эталонного) изображения fon(t) (фиг.2, поз.1), и в блок измерения параметра T7, где происходит измерение параметра T - длины пакета импульсов подсчетом их количества в пакете. Значение измеренного параметра Т используется при сдвиге опорного изображения на величины ±T по кадру (фиг.2.б, поз.2, 3), таким образом достигается адаптация системы слежения к изменению угла наклона контура объекта слежения и построение линейной пеленгационной характеристики по каналу Y. Принцип формирования пеленгационной характеристики одинаков для обоих каналов Y и Z. Сдвинутые в блоке памяти 8 на ±Т измеренную величину параметра Т по каналу Y и на ±τ постоянную величину параметра τ по каналу Z опорные (эталонные) изображения fon(t+T), fon(t-T) и fon(t+τ), fon(t-τ) в четырех умножителях 9, 10, 11, 12 умножаются на обработанное аналогично опорному текущее изображение fmeк(t) с выхода линии задержки τu/2 4. Фильтры низких частот (ФНЧ) 13, 14, 15, 16 производят суммирование результатов произведения, тем самым вычисляют корреляционные функции K1(τ)=Σfon(t-T)fmeк(t), K2(τ)=Σfon(t+T)fmeк(t) в канале Y (фиг.2.б, поз.4, 5) и K1(τ)=Σfon(t-τ)fmeк(t), K2(τ)=Σfon(t+τ)fmeк(t) в канале Z. Вычитатели 17, 18 реализуют дифференциальный принцип вычисления рассогласований, вычисляя дифференциальные корреляционные функции Кдиф(τ)=К2(τ)-К1(τ) в канале Y (фиг.2.б, поз.6) и в канале Z, тем самым формируя пеленгационные характеристики. Сигналы, пропорциональные рассогласованию, поступают на усилители с автоматической регулировкой усиления 19, 20, с выхода которых поступают на исполнительные устройства для устранения рассогласования.
Источник информации
1. Комплексная прицельно-навигационная система ПНС-24М / Под ред. Ганулича А.К., Сидорина В.М., ч.II. Лазерно-телевизионная прицельная система «Кайра-24». М: ВВИА им. проф. Н.Е.Жуковского, 1980, с.60-67 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282874C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2305296C2 |
| Устройство для автоматического сопровождения объекта слежения | 2018 |
|
RU2694888C1 |
| Способ итерационного измерения рассогласования в двумерных следящих системах и устройство для его осуществления | 2019 |
|
RU2733262C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Устройство для выделения прямолинейных элементов контура изображения | 1988 |
|
SU1628069A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| Телевизионное устройство для обнаружения объектов | 1989 |
|
SU1663779A2 |


Изобретение относится к области двумерных телевизионных следящих систем, а именно к телевизионным прицельным системам и к системам для определения направления или отклонения от заданного направления, использующим оптическое излучение. Техническим результатом является формирование линейных пеленгационных характеристик, повышение точности определения рассогласования и эффективности сопровождения объекта слежения. Устройство для автоматического сопровождения объекта слежения содержит видеоусилитель, пороговое устройство, генератор стандартных импульсов, линию задержки, блок управления, блок записи, блок памяти эталонного изображения, четыре умножителя, четыре фильтра низких частот, два вычитателя, два усилителя с автоматической регулировкой усиления, блок измерения длины пакета импульсов эталонного изображения по каналу Y. 4 ил.
Устройство для автоматического сопровождения объекта слежения, содержащее видеоусилитель, аналоговый вход которого является входом устройства, пороговое устройство, входом которого является выход видеоусилителя, генератор стандартных импульсов, входом которого является выход порогового устройства, линию задержки, входом которой является выход генератора стандартных импульсов, блок управления, на вход которого поступают синхронизирующие импульсы, блок записи, входами которого являются выход блока управления, по командам которого производится перезапись эталонного изображения, и первый выход линии задержки, блок памяти эталонного изображения, выполненный с возможностью формирования сдвинутых на фиксированные величины ±Т и ±τ эталонов изображения по каналам Y и Z соответственно, где параметр Т - длина пакета импульсов эталонного изображения по каналу Y, а параметр τ - длина импульса по каналу Z, формируемого генератором стандартных импульсов, входом которого является выход блока записи, первый, второй, третий и четвертый умножители, первыми входами которых являются соответствующие выходы блока памяти эталонного изображения и вторыми входами - второй выход линии задержки, первый, второй, третий и четвертый фильтры низких частот, входами которых являются выходы первого, второго, третьего и четвертого умножителей соответственно, первый и второй вычитатели, входами первого вычитателя являются выходы первого и второго фильтров низких частот, входами второго вычитателя - выходы третьего и четвертого фильтров низких частот, первый и второй усилители с автоматической регулировкой усиления, входами которых являются выходы первого и второго вычитателей соответственно, выходы усилителей с автоматической регулировкой усиления являются выходами устройства, сигналы с которых поступают на приводы следящей системы для устранения рассогласования, отличающееся тем, что дополнительно имеет блок измерения параметра Т - длины пакета импульсов эталонного изображения по каналу Y, вход которого соединен с выходом блока записи, а выходом является второй вход блока памяти эталонного изображения, выполненного с возможностью формирования сдвинутых эталонов изображения по каналу Y на изменяемую величину ±Т.
| ГАНУЛИЧ А.К | |||
| и др | |||
| Лазерно-телевизионная прицельная система «Кайра» | |||
| - М.: ВВИА им | |||
| проф | |||
| Н.Е.Жуковского, 1980, ч.2, с.60-67 | |||
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Координатный телевизионный измеритель | 1981 |
|
SU1040624A1 |
| US 3828122 A, 06.08.1974 | |||
| Электропривод постоянного тока | 1984 |
|
SU1159141A1 |
| JP 5716467 A, 09.10.1982. | |||

