Область техники, к которой относится изобретение
Изобретение относится к системам, аналогичным радиолокационным следящим системам, в которых тип волн несущественен, в частности, к устройству для автоматического сопровождения объекта слежения и может быть использовано в автоматических двумерных телевизионных следящих системах, измеряющих рассогласование по двум координатам, а именно к телевизионным визирам, например, в робототехнических системах сельского хозяйства.
Уровень техники
Известен оптический коррелятор реального времени Вен дер Люгта на фоторефрактивном кристалле арсенида галлия GaAs, в котором для повышения надежности распознавания обрабатываемые изображения предварительно оконтуривают (см. патент США 5150228, МПК G03B 1/16, опубликован 22.09.1992 г.).
Недостатками аналога - коррелятора являются: сложная оптическая схема, чувствительность к вибрации, что не позволяет использовать его в мобильных робототехнических системах.
Известен способ измерения рассогласования в автоматических следящих устройствах, основанный на дифференциальном методе построения пеленгационных характеристик двух каналов, при котором в каждом канале вычисляются два значения корреляционной функции: K1,2(X)=∫AB(x-X)⋅B(x±ΔX)dX, где х - аргумент эталонной (опорной) функции В(х), а X - измеряемая величина смещения (рассогласования) текущей функции В(х-Х) относительно опорной В(х), ΔХ - фиксированное значение смещения функции В(х), с опережением В(х-ΔХ) и запаздыванием В(х+ΔХ), применяемое для вычисления корреляционных функций K1(X) и K2(Х), позволяющих построить пеленгационные характеристики ΔК(Х)=К2(Х)-К1(X) в автоматических следящих устройствах для определения знака (направления смещения) и величины (модуля) рассогласования X. Исполнительные устройства по вычисленному знаку и значению устраняют рассогласование в требуемом направлении и на вычисленную величину (см. Мелик-Шахназаров A.M., Маркатун М.Г. Цифровые измерительные системы корреляционного типа. - М.: Энергоатомиздат, 1985, с. 53-60).
Недостатком известного способа является гипотеза об аналогичности сигналов в каналах измерения, однако, если в каждом канале обрабатываются разнотипные сигналы, то они требуют различных алгоритмов обработки.
Известно наиболее близкое по технической сущности устройство-прототип для автоматического сопровождения объекта слежения с двумя независимыми идентичными каналами вычисления рассогласований UY и UZ, состоящее из видеоусилителя, порогового устройства, генератора стандартных импульсов, линии задержки, блока записи, блока измерения параметра Т, блока памяти, четырех умножителей, четырех фильтров, двух вычитателей и двух усилителей с автоматической регулировкой усиления, при этом аналоговый вход видеоусилителя является входом устройства, входом порогового устройства является выход видеоусилителя, входом генератора стандартных импульсов является выход порогового устройства, входом линии задержки является выход генератора стандартных импульсов, на вход блока управления поступают синхронизирующие импульсы, входами блока записи являются выход блока управления и первый выход линии задержки, входом блока измерения параметра Т является выход блока записи, входами блока памяти являются выход блока измерения параметра Т и выход блока записи, входом блока памяти эталонного изображения является выход блока записи, первыми входами первого, второго, третьего и четвертого умножителей являются соответствующие выходы блока памяти эталонного изображения и вторыми входами - второй выход линии задержки, входами первого, второго, третьего и четвертого фильтров низких частот являются выходы первого, второго, третьего и четвертого умножителей, соответственно, входами первого вычитателя являются выходы первого и второго фильтров низких частот, входами второго вычитателя - выходы третьего и четвертого фильтров низких частот, входами первого и второго усилителей с автоматической регулировкой усиления являются выходы первого и второго вычитателей, соответственно, выходы усилителей с автоматической регулировкой усиления являются выходами устройства-прототипа, сигналы с которых поступают на приводы следящей системы для устранения рассогласования (см. пат. РФ №2284552, кл. G01S 13/66, опубл. 27.09.2006).
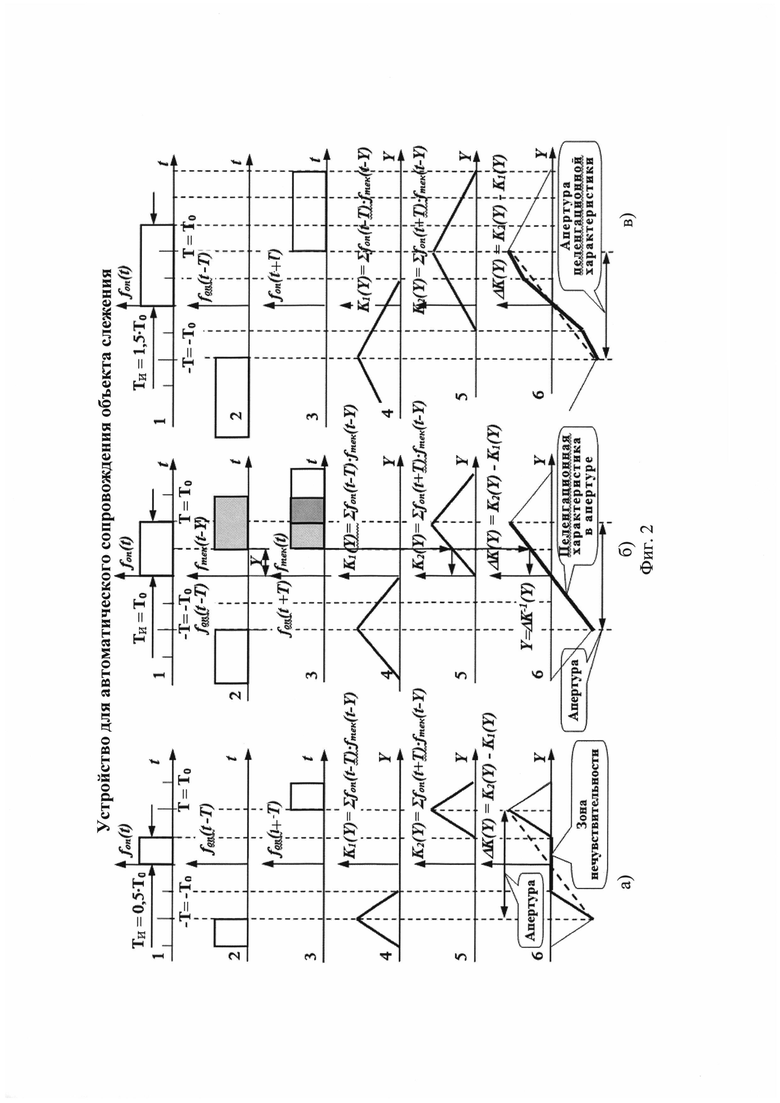
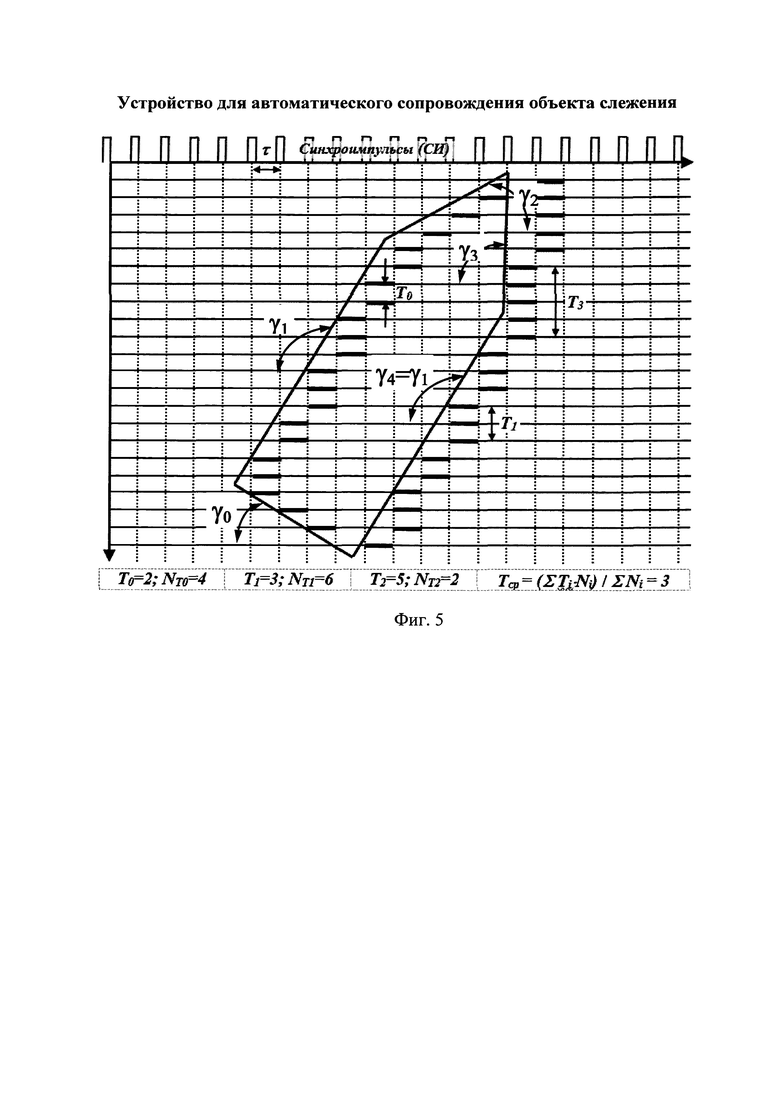
Недостатком данного известного устройства-прототипа является ошибка в определении величины рассогласования по каналу Y, возникающая вследствие предположения об одинаковости угла наклона γ линий контура объекта слежения к телевизионной строке (фиг. 4.а или 4.б или 4.в) при формировании цифрового контура объекта слежения. Реальный цифровой контур объекта слежения могут формировать линии с различными углами наклона γi, приводящими к различным значениям параметра Ti (фиг. 5). Не учет множественности значений Ti высот пакетов импульсов и сдвиг эталонных цифровых контуров объекта слежения по кадру, измеряемый в канале Y, на принятое значение, например, fоп(t±T0); когда T=T1 или Т=Т2 приводит к нелинейностям реальных пеленгационных характеристик (фиг. 2.а.6 и 2.в.6) и, как следствие, к снижению точности определения рассогласования по каналу Y и, соответственно, уменьшению надежности сопровождения объекта слежения.
Раскрытие изобретения
Технической задачей изобретения является повышение точности определения рассогласования по каналу Y и, соответственно, надежности сопровождения объекта слежения вычислением среднего значения Tcp=∑NiTi/∑Ni, учитывающего множественность значений параметра Ti - -высот пакетов импульсов цифрового контура объекта слежения, измеряемых количеством импульсов ni в каждом из Ni - пакетов импульсов (фиг. 4 и 5), формирующих цифровые контуры объекта слежения, который является величиной переменной, зависящей от угла γi - наклона контура объекта слежения, что позволяет формировать пеленгационную характеристику ΔК(Y) канала Y дифференциальным методом (фиг. 2.б.4 и б.5), максимально приближенную к линейной (фиг. 2.б.6).
Технический результат предлагаемого изобретения сводится к повышению точности определения рассогласования по каналу Y и, соответственно, надежности сопровождения объекта слежения.
Технический результат достигается с помощью устройства для автоматического сопровождения объекта слежения, содержащего видеоусилитель, аналоговый вход которого является входом устройства, пороговое устройство, входом которого является выход видеоусилителя, генератор стандартных импульсов, входом которого является выход порогового устройства, линию задержки, входом которой является выход генератора стандартных импульсов, блок управления, на вход которого поступают синхронизирующие импульсы, блок записи, входами которого являются выход блока управления, по командам которого производится перезапись эталонного цифрового контура объекта слежения, и первый выход линии задержки, блок измерения параметра Т, вычисляющий высоты пакетов импульсов Ti эталонного цифрового контура объекта слежения по каналу Y, входом которого является выход блока записи, блок памяти эталонного цифрового контура объекта слежения, выполненный с возможностью формирования сдвинутых на фиксированные величины ±Т и ±τ эталонов цифрового контура объекта слежения по каналам Y и Z соответственно, где параметр Т - высота пакета импульсов эталонного цифрового контура объекта слежения по каналу Y, а параметр τ - длина импульса по каналу Z, формируемого генератором стандартных импульсов, входами блока памяти являются выход блока измерения параметра Т и выход блока записи, первый, второй, третий и четвертый умножители, первыми входами которых являются соответствующие выходы блока памяти эталонного цифрового контура объекта слежения и вторыми входами - второй выход линии задержки, первый, второй, третий и четвертый фильтры низких частот, входами которых являются выходы первого, второго, третьего и четвертого умножителей соответственно, первый и второй вычитатели, входами первого вычитателя являются выходы первого и второго фильтров низких частот, входами второго вычитателя - выходы третьего и четвертого фильтров низких частот, первый и второй усилители с автоматической регулировкой усиления, входами которых являются выходы первого и второго вычитателей соответственно, выходы усилителей с автоматической регулировкой усиления являются выходами устройства, сигналы с которых поступают на приводы следящей системы для устранения рассогласования, предлагаемое устройство дополнительно имеет блок вычисления среднего значения Тср параметра Т - средней высоты пакетов импульсов эталонного цифрового контура по каналу Y, вход которого соединен с выходом блока измерения параметра Т, а выходом является первый вход блока памяти эталонного цифрового контура, выполненного с возможностью формирования сдвинутых эталонов цифрового контура объекта слежения по каналу Y на вычисленную величину ±Тср.
Существенным отличительным признаком, отраженным в формуле изобретения, является элемент устройства для автоматического сопровождения объекта слежения - блок вычисления Тср - среднего значения высот Т, пакетов Ni - импульсов эталонного цифрового контура fоп(t).
Технический результат изобретения достигнут за счет учета вычисленного среднего значения Тср множества Ti параметра Т - высот Ni пакетов импульсов эталонного цифрового контура, благодаря использованию нового блока и новых связей в схеме устройства для автоматического сопровождения объекта слежения.
Краткое описание чертежей
На фиг. 1 представлена структурная схема системы слежения, общий вид;
на фиг. 2 - графики, иллюстрирующие формирование пеленгационной характеристики следящей системы по каналу Y;
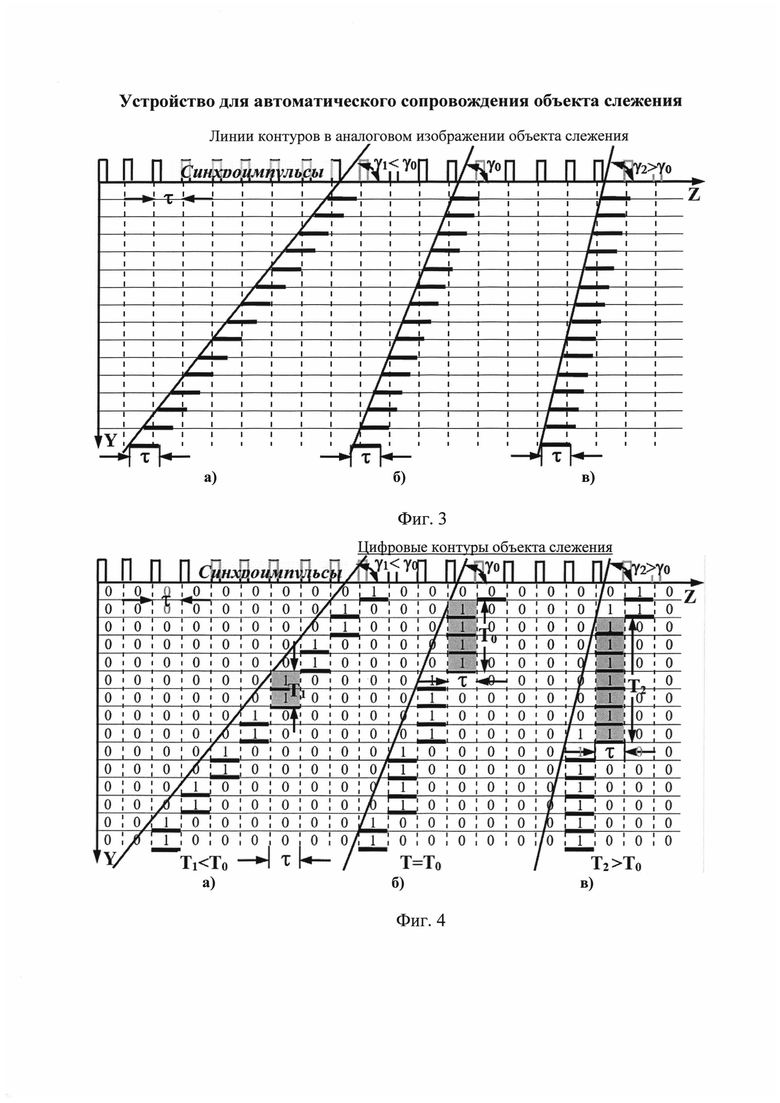
на фиг. 3 - развертка телевизионного сигнала, снимаемого с генератора стандартных импульсов;
на фиг. 4 - развертка телевизионного сигнала после квантования по времени, снимаемого с линии задержки;
на фиг. 5 - реальные цифровые контуры объекта слежения с различными углами наклона.
Осуществление изобретения
Устройство для автоматического сопровождения объекта слежения, измеряющее рассогласования Y и Z по каналам Y и Z, соответственно, (фиг. 1), содержит видеоусилитель 1, аналоговый вход которого является входом устройства для автоматического сопровождения объекта слежения, пороговое устройство 2, входом которого является выход видеоусилителя 1, генератор 3 стандартных импульсов, входом которого является выход порогового устройства 2, линию 4 задержки, входом которой является выход генератора 3 стандартных импульсов, блок 5 записи, входами которого являются первый выход линии 4 задержки и выход блока 6 управления, по командам которого производится перезапись эталонного цифрового контура объекта слежения fоп(t) (фиг 2), на вход которого поступают синхронизирующие импульсы (СИ), блок 7 измерения параметра Т, вычисляющий высоты Ti пакетов Ni импульсов эталонного цифрового контура объекта слежения fоп(t) по каналу Y и количество пакетов Ni с высотой Ti входом которого является выход блока 5 записи, а выход подключен к блоку 8 вычисления среднего значения параметра Т - средней высоты Тср пакетов импульсов эталонного цифрового контура объекта слежения fоп(t) по каналу Y, выход которого является первым входом блока 9 памяти эталонного цифрового контура объекта слежения fоп(t), выполненного с возможностью формирования сдвинутых эталонов цифрового контура объекта слежения по каналу Y на вычисленную величину ±Тср, и ±τ эталонов цифрового контура объекта слежения по каналам Y и Z, соответственно, где параметр τ - период следования синхронизирующих импульсов (СИ) по каналу Z, формируемых генератором 3 стандартных импульсов, входами блока 9 памяти являются выходы блока 8 вычисления Тср и блока 5 записи, а выходы являются первыми входами первого fоп(t+Tcp), второго fоп(t-Tcp), третьего fоп(t+τ) и четвертого fоп(t-τ) умножителей 10, 11, 12, 13, соответственно, а вторыми их входами - второй выход линии задержки; первый, второй, третий и четвертый фильтры 14, 15, 16, 17 низких частот, соответственно, входами которых являются выходы первого, второго, третьего и четвертого умножителей 10, 11, 12, 13, соответственно; первый 18 и второй 19 вычитатели, входами первого вычитателя 18 являются выходы первого и второго фильтров низких частот 14, 15, соответственно, входами второго вычитателя 19 - выходы третьего и четвертого фильтров 16, 17 низких частот, соответственно, первый 20 и второй 21 усилители с автоматической регулировкой усиления, входами которых являются выходы первого и второго вычитателей 18, 19, соответственно, выходы усилителей с автоматической регулировкой усиления 20, 21, соответственно, являются выходами устройства для автоматического сопровождения объекта слежения, значения рассогласований UY и UZ с которых поступают на приводы следящей системы (на фиг. 1 не показана) для устранения рассогласования, при этом дополнительно содержит блок 8 вычисления Тср, на выходе которого формируется значение Tcp=∑NiTi/∑Ni (Ni - количество пакетов с высотой Ti, измеряемой количеством импульсов ni в пакете Ni, ∑Ni - общее количество пакетов импульсов) по каналу Y, вход которого соединен с выходом блока 7 измерения параметра Ti и подсчета количества пакетов Ni, а выход является первым входом блока 9 памяти эталонного цифрового контура объекта слежения fоп(t), выполненный с возможностью формирования сдвинутых эталонов fоп(t+Tcp) и fоп(t-Tcp), соответственно, цифрового контура объекта слежения по каналу Y на вычисляемую величину ±Тср.
Устройство для автоматического сопровождения объекта слежения работает следующим образом.
Видеосигнал с видикона (на фиг. 1 не показан) поступает на видеоусилитель 1 и далее на пороговое устройство 2, на выходе которого формируется бинарный сигнал - прямоугольные импульсы с различной длительностью. С порогового устройства 2 бинарное изображение поступает на генератор 3 стандартных импульсов, на выходе которого формируются импульсы с одинаковой длительностью τ, равной периоду следования синхроимпульсов; изображение объекта слежения, созданное приведением бинарного изображения к импульсам одинаковой длительности τ, подается на линию 4 задержки, в результате формируется аналоговый контур объекта слежения (фиг. 3). Линия 4 задержки компенсирует систематический сдвиг изображения за счет квантования по времени, кроме того, логическим умножением импульсов аналогового контура объекта слежения и синхронизирующих импульсов производится преобразование аналогового контура объекта слежения в наборы меандров, формирующих цифровой контур объекта слежения (фиг. 4). В результате цифровой контур объекта слежения fтек(t) получается с растровыми искажениями в виде пакетов импульсов с постоянной шириной τ и переменными высотами Ti, зависящими от углов наклона γi к телевизионной строке (фиг. 4.а, б, в) в цифровом контуре объекта слежения. Двоичный код, представляющий, цифровой контур объекта слежения (фиг. 4) поступает в блок 5 записи и на четыре умножителя 10, 11, 12, 13, соответственно. Блок 5 записи формирует цифровой контур объекта слежения в виде массива нулей и единиц (фиг. 4), который поступает в блок 9 памяти и по командам блока 6 управления периодически перезаписывается цифровой контур объекта слежения, хранимый в виде опорного (эталонного) цифрового контура объекта слежения fоп(t) (фиг. 2, поз. 1), и в блок 7 измерения параметра Т для определения высот Ti пакетов импульсов подсчетом количества ni импульсов в пакете и количества этих пакетов Ni по каналу Y, которые подаются в блок 8 вычисления средней высоты Тср пакета импульсов, выход которого является входом блока 9 памяти, в котором Тср учитывается при формировании сдвинутых эталонных цифровых контуров fоп(t±Tcp) объекта слежения по каналу Y (фиг. 2.б, поз. 2, 3), таким образом достигается адаптация системы слежения к изменениям углов γi наклона линий в цифровых контурах объекта слежения (фиг. 3, 4, 5) и построение настраиваемой пеленгационной характеристики по каналу Y (фиг. 2.б.6). Принцип формирования пеленгационной характеристики одинаков для обоих каналов Y и Z (фиг. 1). Опорные (эталонные) цифровые контуры объекта слежения, сдвинутые в блоке 9 памяти на вычисленную величину ±Тср параметра Т по каналу Y: fоп(t+Тср), fоп(t-Тср) и на ±τ постоянную величину параметра т по каналу Z: fоп(t+τ), for(t-τ) в четырех умножителях 10, 11, 12, 13 умножаются на обработанный, аналогично опорному, текущий цифровой контур объекта слежения fтек(t), поступающий с выхода линии 4 задержки. Фильтры 14, 15, 16, 17 низких частот производят суммирование результатов произведения, тем самым вычисляют значения корреляционных функций K1(Y)=∑fоп(t-T)⋅fтек(t), K2(Y)= ∑fоп(t+T)⋅fтек(t) в канале Y (фиг. 2.б, поз. 4, 5) и K1(Z)=∑fоп(t-τ)⋅fтек(t), K2(Z)= ∑fоп(t+τ)⋅fтек(t) в канале Z. Вычитатели 18, 19 реализуют дифференциальный принцип определения рассогласований, вычисляя дифференциальные корреляционные функции ΔК(Y)=К2(Y)-К1(Y) в канале Y (фиг. 2.б, поз. 6) и ΔК(Z)=К2(Z)-K1(Z) в канале Z, тем самым формируя пеленгационные характеристики каналов Y и Z устройства для автоматического сопровождения объекта слежения. Сигналы UY и UZ, пропорциональные рассогласованиям Y и Z в каналах Y и Z, соответственно, между опорным fоп(t) (требуемым) и текущим fтек(t) цифровыми контурами объекта слежения, поступают на усилители 20, 21 с автоматической регулировкой усиления, соответственно, с выходов которых подаются на приводы следящей системы (на фиг. 1 не показаны) для устранения рассогласования.
Эффективность предлагаемого решения проверена и подтверждена компьютерным моделированием.
Предлагаемое изобретение по сравнению с прототипом и другими известными решениями за счет учета вычисленного среднего значения Тср множества Ti параметра Т - высот пакетов импульсов Ni эталонного цифрового контура объекта слежения в канале Y, реализованного в новом блоке, и новым связям в схеме устройства, имеет преимущество: повышение точности определения рассогласования по каналу Y и, как следствие, надежности сопровождения объекта слежения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ итерационного измерения рассогласования в двумерных следящих системах и устройство для его осуществления | 2019 |
|
RU2733262C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА СЛЕЖЕНИЯ | 2004 |
|
RU2284552C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282874C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2305296C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |

Изобретение относится к системам, аналогичным радиолокационным следящим системам, работающим в оптическом диапазоне волн, в частности к устройству для автоматического сопровождения объекта слежения, и может быть использовано в сенсорах робототехнических систем, например в робототехнических системах сельского хозяйства. Технический результат заключается в повышении точности измерения рассогласования между текущим и требуемым положениями изображения объекта слежения в канале Y. Указанный результат достигается за счет того, что устройство для автоматического сопровождения объекта слежения содержит видеоусилитель, пороговое устройство, генератор стандартных импульсов, линию задержки, блок записи, блок управления, блок измерения параметра Т, блок измерения Тср, блок памяти, четыре умножителя, четыре фильтра низких частот, два вычитателя, два усилителя с автоматической регулировкой усиления, сигналы с которых поступают на приводы следящей системы для устранения рассогласования, при этом все перечисленные средства определенным образом соединены между собой. 5 ил.
Устройство для автоматического сопровождения объекта слежения, содержащее видеоусилитель, аналоговый вход которого является входом устройства, пороговое устройство, входом которого является выход видеоусилителя, генератор стандартных импульсов, входом которого является выход порогового устройства, линию задержки, входом которой является выход генератора стандартных импульсов, блок управления, на вход которого поступают синхронизирующие импульсы, блок записи, входами которого являются выход блока управления, по командам которого производится перезапись эталонного цифрового контура объекта слежения, и первый выход линии задержки, блок измерения параметра Т, вычисляющий высоты пакетов импульсов Ti эталонного цифрового контура объекта слежения по каналу Y, входом которого является выход блока записи, блок памяти эталонного цифрового контура объекта слежения, выполненный с возможностью формирования сдвинутых на фиксированные величины ±Т и ± τ эталонов цифрового контура объекта слежения по каналам Y и Z соответственно, где параметр Т - высота пакета импульсов эталонного цифрового контура объекта слежения по каналу Y, а параметр τ - длина импульса по каналу Z, формируемого генератором стандартных импульсов, входами блока памяти являются выход блока измерения параметра Т и выход блока записи, первый, второй, третий и четвертый умножители, первыми входами которых являются соответствующие выходы блока памяти эталонного цифрового контура объекта слежения и вторыми входами - второй выход линии задержки, первый, второй, третий и четвертый фильтры низких частот, входами которых являются выходы первого, второго, третьего и четвертого умножителей соответственно, первый и второй вычитатели, входами первого вычитателя являются выходы первого и второго фильтров низких частот, входами второго вычитателя - выходы третьего и четвертого фильтров низких частот, первый и второй усилители с автоматической регулировкой усиления, входами которых являются выходы первого и второго вычитателей соответственно, выходы усилителей с автоматической регулировкой усиления являются выходами устройства, сигналы с которых поступают на приводы следящей системы для устранения рассогласования, отличающееся тем, что оно дополнительно снабжено блоком вычисления среднего значения Тср параметра Т - средней высоты пакетов импульсов эталонного цифрового контура объекта слежения по каналу Y, вход которого соединен с выходом блока измерения параметра Т, а выходом является первый вход блока памяти эталонного цифрового контура объекта слежения, выполненного с возможностью формирования сдвинутых эталонов цифрового контура объекта слежения по каналу Y на вычисленную величину ±Тср.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА СЛЕЖЕНИЯ | 2004 |
|
RU2284552C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282874C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2010 |
|
RU2435172C1 |
| WO 2007127291 A2, 08.11.2007 | |||
| US 6373508 B1, 16.04.2002 | |||
| JP 2002181926 A, 26.06.2002. | |||

