«A/J
CD
ю
4
Изобретение относится к технике телевизионных измерений координат и скорости движущихся объектов. Известен координатный телевизион ный измеритель, содержгиций телевизионную передающую камеру, квантователь и два канала обработки сигналов, каждый из которых состоит из последовательно соединенных генератора полустробой, бинарного кЬординатного-дискриминатора, умножителя и цифрового фильтра, а также блока весовых коэффициентов,. Особенностью данного измерителя является использование-в каналах обработки сигналов убывающих во вре мени весовых коэффициентов, с которым выходные сигналы координатных дискриминаторов ( сигналы ошибок ) обрабатываются в цифровых фильтрах с целью оценок параметров движения наблюдаемого объекта. Этим, с одной стороны, обеспечивается чОтносительно высокая чуствительность в переходном режиме, необ ходимая для быстрой обработки начальных координатных рассогласований между центрами изображения и следящего строба, а с другой - умен шается дисперсия оценок параметров движения изображения к концу интервала наблюдения вследствие постелен ного увеличения инерционности С1 L Однако при обычно используемых в телевизионных измерителях координатных дискриминаторах (например, релейного типа j та же особенность приводит одновременно к значительно му сниженшо точности слежения з.а объектами с большим начальным координатным рассогласованием, поскольк для отраб.отки этого рассогласования при нелинейном ; координатном дискри минаторе требуется сохранение повышенной чувствительности в течение более длительного времени, чем при линейном. Другой недостаток, также снижающий точность измерения, заключается в необходимости использования большого следящего строба, размеры кото рого должны превышать размеры наибо шего из подлежащих наблюдению изобр жений объекта, что увеличивает уровень флуктуационного шума на выхода .координатных дискриминаторов при сл жении за изображениями малой площаттиЦель, изобретения - повышение точ ности измерений в динамическом режиме путем уменьшения переходного процесса за счет предварите ной нормировки площадей телевизионных изображений наблюдаемых объекто и автоматического управления законо изменения весовых коэффициентов в зависимости от степени фактической отработки каналами обработки сигналов начального координатного рассогласования. Указанная цель достигается тем, что в.известный координатный телевизионный измеритель, содержащий передающую телевизионную камеру, а также два канала обработки сигналов, каждый из которых, состоит из последовательно соединенных генератора полустробов, бинарного координатного дискриминатора, умножителя и цифрового фильтра, а также блока весовых коэффициентов, выход которого подключен к второму входу умножителя,при этрм.выход цифрового фильтра соединен с первым входом генератора полу стробов,, второй вход которого соединен с первым входом генератора полустробов другого канала обработки сигналов, введены последовательно соединенные квантователь и блок в ыделения сигнала от центров объектов, выход которого подключен к соответствующему входу бинарного координатного дискриминатора каждого из каналов обработки сигналов, а также в каждый канал обработки сигналов последовательно соединенные регистр памяти и блок анализа корреляции сигналов, причем вход регистра памяти подключен к выходу бинарного координатного дискриминатора,- . а выход блок.а анализа корреляции сигналов .подключен к входу блока весовых коэффициентов, при этом вход квантователя соединен с выходом передающей телевизионной камеры. На чертеже приведена структурная электрическая схема координатного телевизионного измерителя. Устройство содержит передающую телевизионную камеру 1, квантователь 2, блок 3 выделения сигналов от центров объектов и два канала I и II обработки сигналов, каждый из которых состоит из бинарного координатного дискриминатора 4, умножителя 5, блока 6 ве.совых коэффициентов, цифрового фильтра 7, генератора 8 полустробов, регистра 9 памяти, блока 10 анализа корреляции сигналов . .Устройство работает следующим образом. Видеосигнал с телевизионной передающей камеры 1 подвергается бинарному квантованию в квантователе 2 и поступает в блок 3 выделения сигналов от центров объектов, который может быть выполнен; например, в виде электронной сканиру1бтей логической апертуры Операция, осуществляемая блоком 3, эквивалентна нормировке площадей изображений наб.людаемых объектов, при которой эти изображения заменяются их центральными элементами фиксированных размеров, что лозвЬляет реализовать помехоустойчивое слежение за любым иэ минимаЛьной площади. К началу п -го телевизионного кад |)а в цифровых фильтрах 7 каналов I и II обработки сигналов. содержатся 9ценки {n-1/n-l/ и у (h-l / п-1) ве торов X(rt-l) и Y(n-i параметров дви жения изображения наблюдаемого та (векторов состояния) в предцдуцем (h-l)-OM кадреI сформированные координатными телевизионным измерителей на основании (n-l)-ro пйедшествующМс измерений. Компонентами этих вектор ров могут служить, например, коордй наты центра объекта, еГо скорость, ; ускорение и т.д. вдоль строки, телевизионного-растра Спо координате XJ и в направлении кадровой развертки изображения (по координате Y/, а также любые Нелинейные комбинации этих величин. При этом предполагается, что векторы состояния в п -ом и(п-1}- м телевизионных кадрах связаны зависимостями . X( Ф)((n,t -1Щn-1) У(1) Фу(п,п-1)У(п-1), где(у(п,-1;ифу(п, IV-1) -априори известнйе переходные матрицы состояния по координатам X и Y . Например, при равномерном прямой .линейном перемещении объекта по телевизионного кадра его динамика выражается соотношениями : -:- )(((i hX2{n-)i Y.{n)Y.,((n-i;; Х2((пИ|; Y2(n)Y2(n-1), гдеХ..,(г1) и V(n) - ЧЕекущие координаты центра объекта, Х2(п) ) составляющие его текущей скорости, выра- женной в количестве элементов растрана которые перемещается изображенй1е объекта за время одного цикла кад-.. ровой телевизионной развертки (за . время между дву1.1я соседними измерениями ). Матричная форма этих соотнб щений Имеет вид: . X(n-lH -Щ. )f,(n-i), откуда следует «Су(п,(п, ОценкичХ(п-1)(п-1Г и Y(ti, пользуются 6 цифровых фильтрах для вычиcJJ,eния ожидаемых значений X(h/n--i) nV|n/n-i) векторов состояния Х1п)иУ(и)1 в п -ом телевизионном кадре по формулам i х((п,п-1)х(п-1/п--1;, j У(п/Ь- ; Ф (n,nrfJY(n-f/n-l). Данные векторы прогнозов поступают в цифровые фильтры 7, а Их компоненты 9(r lri-) и9(п/п-1, представляющие собой прогнозируемые значения координат центра изображения - на входы генераторов 8 полустробов, где к ним привязываются центры следящих стробов, подаваемых на бинарные координатные дискриминаторы 4 . телевизионном кадре. На сигнальные входы тех же бинарных координатных дискриминаторов 4 из блока 3 тюступают видеосигналыот центров объектов, находящихся ы поле зрения передагэщей телевизионной камеры 1, причем видеосигнал, соответствующий объекту, за которым осуществляется слежение, попадает в следящий строб каждого из каналов обработки сигналов, а другие оказываются за его пределами и на работу устройства не вли- яют, . Полустробы генератора 8 первого канала обработки сигналов, образующие в совокупности следящий строб контура слежения 1, ориентированы в направлении строчной телевизионной развертки (по коррдинатеХ), а полустробы генератора 8 второго канала обработки сигналов, образующие следящий строб контура слежения II в направлении кадровой телевизионной развертки (по координате Y). Поэтому на выходе бинарного координатного дискриминатора 4 первого канала обработки сигналов сигнал ошибки 2Лп} определяется координатным рассогласованием между центрами объекта и следящего строба по оси X , а сигнал ошибки Z(n) на выходе бИнариого координатного дискриминатора 4 второго канала обработки сигналов - координатным рассогласованием по оси V . Данные сигналы умножаются в, умножителях 5 иа весовые коэффициенты ICj((n,yjj) и1Ку(п,Уу) генерируемые блоками б в кг1ждом телевизионном кадре по наперед заданной программе, зависящей от управляющих сигналов УХ(П) иУу(п) на их входах, и поступают в цифровые фильтры 7, где они используются для. формирования оцейокХ(п/п|иY(n/ц) векто-, ров состояния Л(п) иУ(г) в п-ом телевизионном кадре путем суммирования их с векторами прогнозовХ(п/п-) и (h/n-fji. X(n/n) y(n/fi-1)tK,(n,V;f) 9((/n)-(h-1)tK(n,V)). Оценки п-1/гм,/ -l/n-i; в цифровых фильтрах 7 заменяются новыми 1 оценками л (п/п/, Y(n/i/, и рассмотренный в.ыше цикл работы контуров слежеНИН повторяется, там же вычисляются новые векторы nporHoaoBXCrH-l/nj и ),а основании которых генера1горы 8 полустробов в ( телев зионном кадре формируют следящие стр бы с центрами в точ1(е растра с координатами X{n+-f/л J ., V () . Под действием этих стробов на выходах би нарных координатных дискриминаторов 4 выделяются сигналы ошибок Z,(n+-l/ и j(-.) которые умножаются в умно жителях 5 на новые значения весовых коэффициентов kj (fi+l, Vpf и kyfo+li Y) вырабатываемые .блоками б и используются затем в цифровых фильтрах 7 для получения оценокX(n+l(n+i/ и Y(n-«--f/n-fi) векторов состояния Х(пИ и Y(rn--l) в () -ом телевизионном кадре. Аналогичным образом формируют ся оценки векторов состояния и во всех последующих кадрах. Работа каналов I и II начинается с вписывания в цифровые фильтр 7 начальных значенийХр Х|0/0) ( векторов оценок параметров движения изобра:жения объекта относительно границ растра в некотором исходном ( нулевом ) тгелевизионном кадре. Данная информация, вводимая в измеритель либо оператором, либо авто.матически-от обнаружителя объектов {не показан), является априорной и служит для первоначального грубого наведения следящего строба на объек подлежащий автосопровождению. Задачей последующих координатных измерений в режиме слежения является оценка текущих векторов состояния Х(п) , Y(n) , выбранного объекта с учетом начальных априорных оценок А (О/О/, T(O/OJ и результ атов измерений (сигналив ошибок)2..((),J.,(i) для ,2,... п . При .линейных характеристиках KOOP динатных дискриминаторов 4 каждая из временных последовательностей, весовых коэффициентов 1С,(л,Л(| и Ку(п, Vy),вырабатываемых блоками б, в отсутствие управляющих сигналов V((n) и Уу(п определяется формулами теории линейной оптимальной фильтрации и в общем случае представляет собой ряд последовательно убывающих чисел За счет этого чувствительность ка налов I и И относительно велика толь ко на начальном этапе оценивания, чем обеспечивается ускоренная отработка начального координатного рас согласования. К концу же интервала наблюдения чувствительность.существенно снижается для получения малой дисперсии оценок векторов состояния. Указанная особенность координат- . кого телевизионного измерителя при обычно используемых на практике нелинейных ( релейного типа коордитор1НЫХ дискриминаторах приводит к возрастанию погрешности оценок из-за затягивания переходного процесса, и как следствие, неполной отработки больших начальных координатных рассогласования. Для исключения этого недостатка сигналы ошибок2(п) и2у(п) подаются в регистры 9 памяти, с Ьыходов которых снимаются сигналы.., соответствующие одновременно нескольким., последовательным телевизионным кадрам. Эти сигналы поступают затем в блоки 10, где они сравниваются между собой и при обнаружении преобладания ошибок того или иного знака вызывают появление сигналов управления Vy(n) и Vy(h) , сдвигающих временные последо.вательности весовых коэффициентов (п и Ку(п), выраба5 тываемых блоками б, на m тактов. 8результате на их выводах появляют-. ся сигналы ,V)(n-m)nKjni /)sKy(-m), Например, в простейшем случае использования одноэлементных регистров 9памяти в блоках 10 сравниваются сигналы ошибок2j((n) и Zy(rt-f/ и у{п-1, При совпадении знаков у первых из них блок 10 рерв.ого канала обработки сигналов вырабатывает сигнал управления У;((п), сдвигающий на один такт после/ч довательность Ky(h) , а при совпадении знаков, У двух других блок.10 второго канала обработки сигналов вырабатывает сигнал управления Vjflh/, сдвигающий на один такт последовательно Ку(п). В результате, если к / п-му телевизионному кадру было зарегистрировано т-, совпадения знаков сигналов ошибок Zy{i) иГ((1-1/ и гп срвпа-, дений знаков сигналов ошибок 2(}viZylM) где ,2,...п, то весовые коэффициенты на выходах блоков 6 в h-и момент, времени примут соответственно вид ,(n-m), М.)Ч( Данные операции временного сдвига последовательностей весовых коэффициентов , реализуемые при помощи блоков 9 и 10, обеспечивают сохранение более высоких значений этих коэффициентов при больших координатных рассогласованиях, не отрабатываемых контурами слежения в ряде последовательных телевизионных кадров. Тем самым укорачивается длительность переходного процесса и повышается результирующая точность формируемых координатным телевизионным измери7 .10406248
телем оценок вектора состояния наблю-тельности весовых коэффициентов
даемого объекта. .сначала вводятся задержки (при наПосле уменьшения координатноголичии совпадений знаков у сигналов
рассогласования до величины, приоцмбки в последовательных телевикоторбй сигналы omH6oKZv(h)и2у(п) из-зионных кадрах), а затем упреждеменяют свой знак от каДра к каДру, 5ний, компенсирующие зти задержки
сигналы управления:Vy(п) иУу(п)непо мере уменьшения частоты совпавырабатываются, и дальнейшие сдвигиДений.
временных последовательностей весовых .Технический эффект от использокоэффициентов прекращаются. .вания предлагаемого телевизионно . 10го измерителя заключается в повышеВ предлагаемой устройстве могутнии точности измерений за счет ис.быть использованы и другие, болеепользования следящего строба минисложные законы управления блокс1мимальных размеров и уменьшения дливёсовыхкоэффициентов б, шакиё тельности переходного процесса например, при которых в последова- 15 каналах обработки сигналов.


| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионное устройство измерения координат и скорости | 1983 |
|
SU1107340A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |
| Телевизионный координатный дискриминатор | 1988 |
|
SU1700766A1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| Телевизионный координатный дискриминатор со стробом размером М @ N элементов разложения | 1979 |
|
SU987853A1 |
| Устройство для автоматической ориентации топологических структур элементов микроэлектроники | 1985 |
|
SU1293490A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| СПОСОБ СЕЛЕКЦИИ ФРАГМЕНТА ИЗОБРАЖЕНИЯ ДЛЯ ТЕЛЕВИЗИОННЫХ КООРДИНАТОРОВ | 2006 |
|
RU2319316C1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
КООРДИНАТНЫЙ ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ, содержащий передающую телевизионную камеру, а также два канала обработки сигналов, каждый из которых состоит из последовательно соединенных генератора полустробов, бинарного координатного дискриминатора, умножителя и цифрового фильтра, а также блока весовых коэффициентов, выход которого подключен к второму входу умножителя, при этом выход цифрового фильтра соединен с йервым входом генератора полустробов , второй вход которого соединен с первым входом генератора полустробов другого канала обработки сигналов. Отличающийся тем, что, с целью повышения точности измерений, в него введены последовательно соединенные квантователь и блок выделения сигнала от центров объектов, выход которого подключен к соответствующему входу бинарного координатного дискриминатора каждого из каналов обработки сигналов, а также в каждый канал обработки сигналов последовательно соединенные регистр памяти и блок анализа корреляции сигналов, причем вход регистра памяти подключен к выходу бинарного координатного дискриминатора , а выход блока анализа корре(Я ляции сигналов подключен к входу блока весовых коэффициентов, при этом вход квантователя соединен с выходом, передающей телевизионной камеры.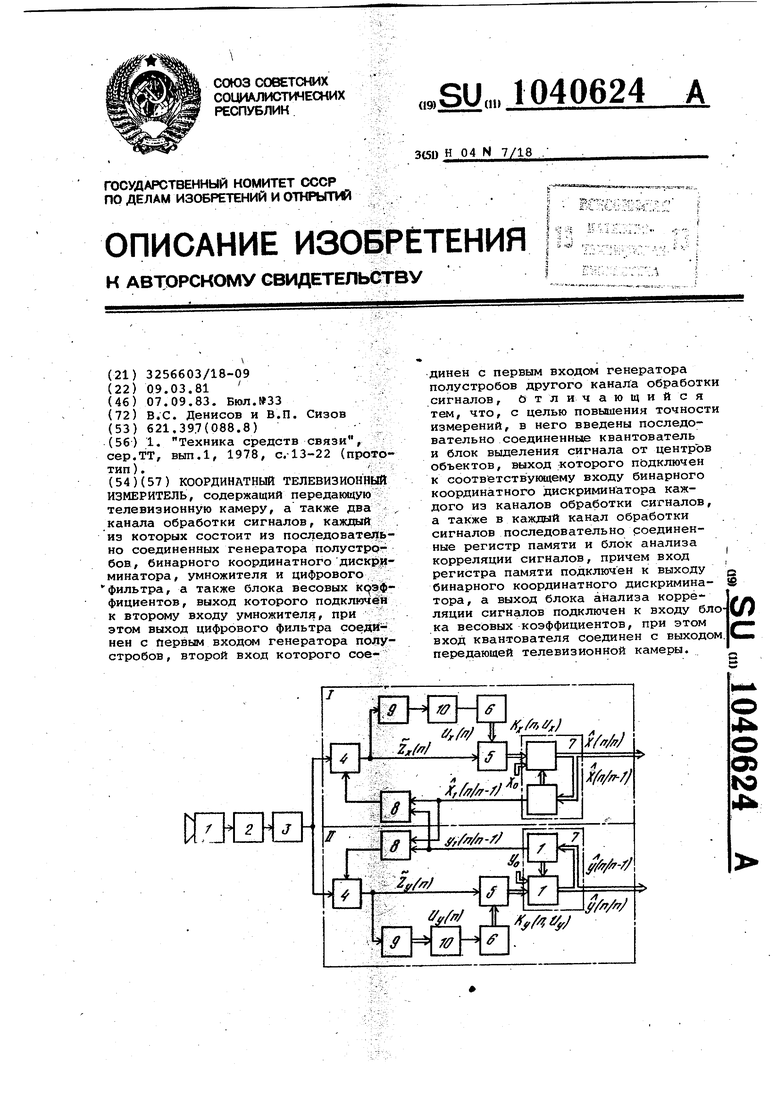
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Техника средств связи, сер.ТТ, вьт.1, 1978, С.-13-22 (прототип ). | |||
