Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для распознавания образов, и может использоваться в системах автоматического анализа изображения для распознавания прямолинейных элементов контура выпуклого изображения.
Цель изобретения - повышение точности устройства.
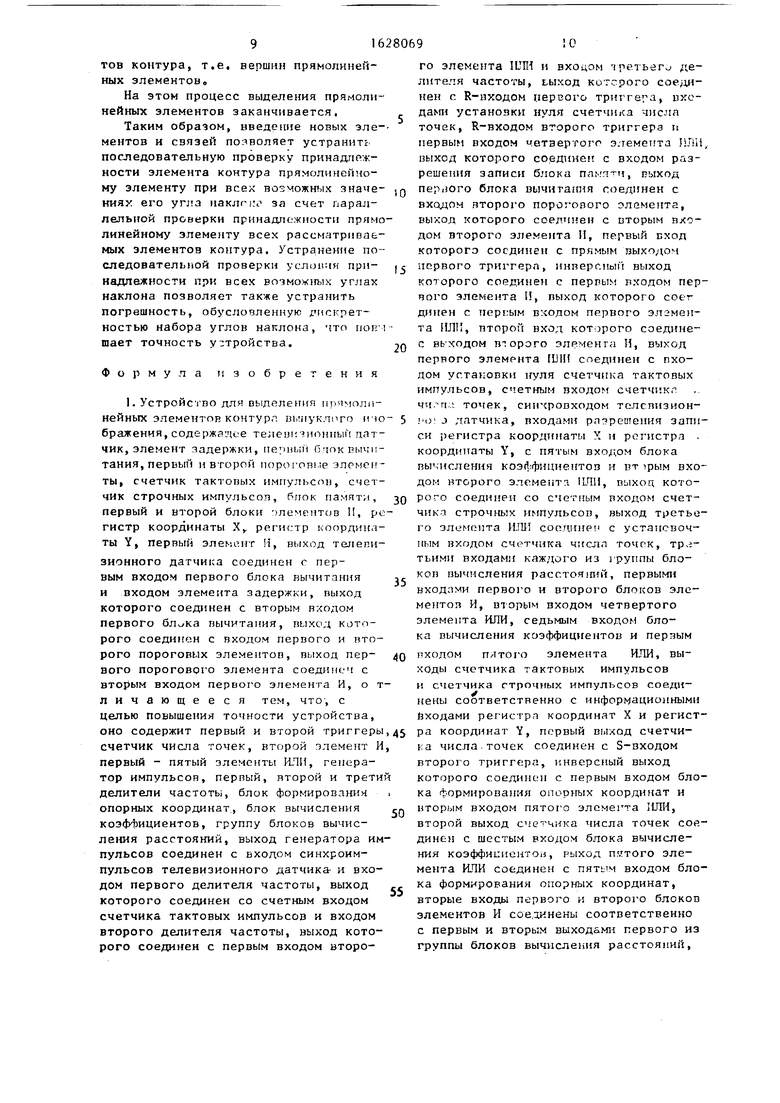
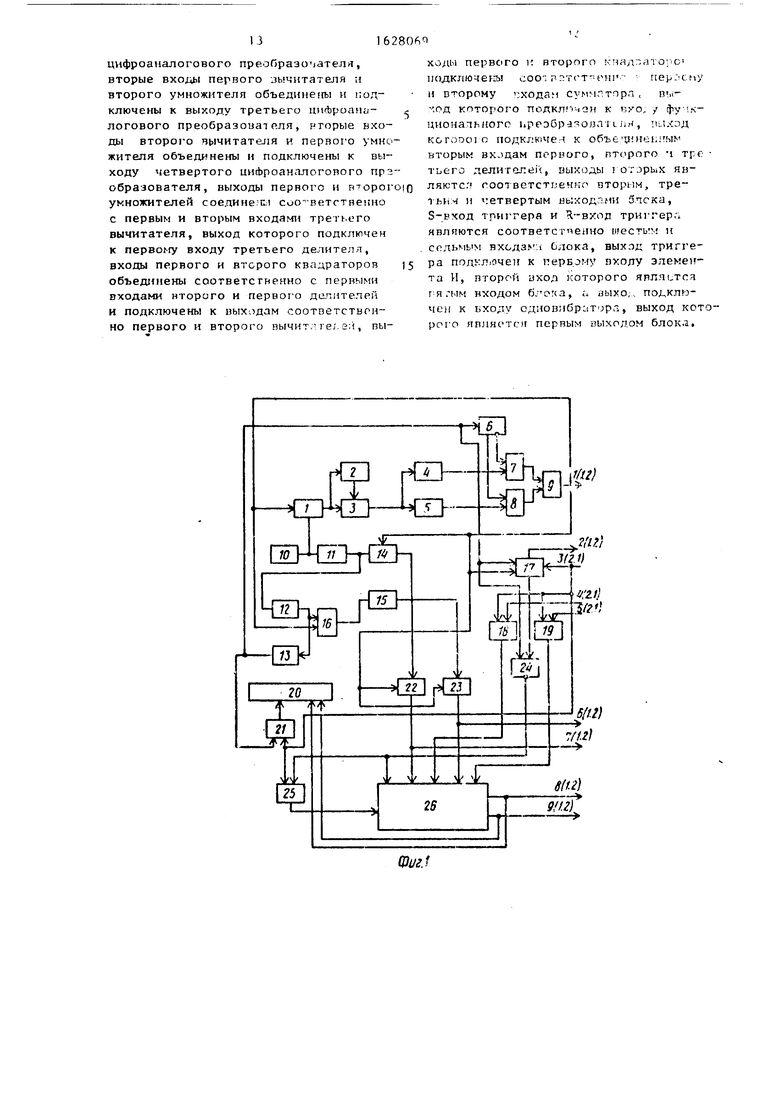
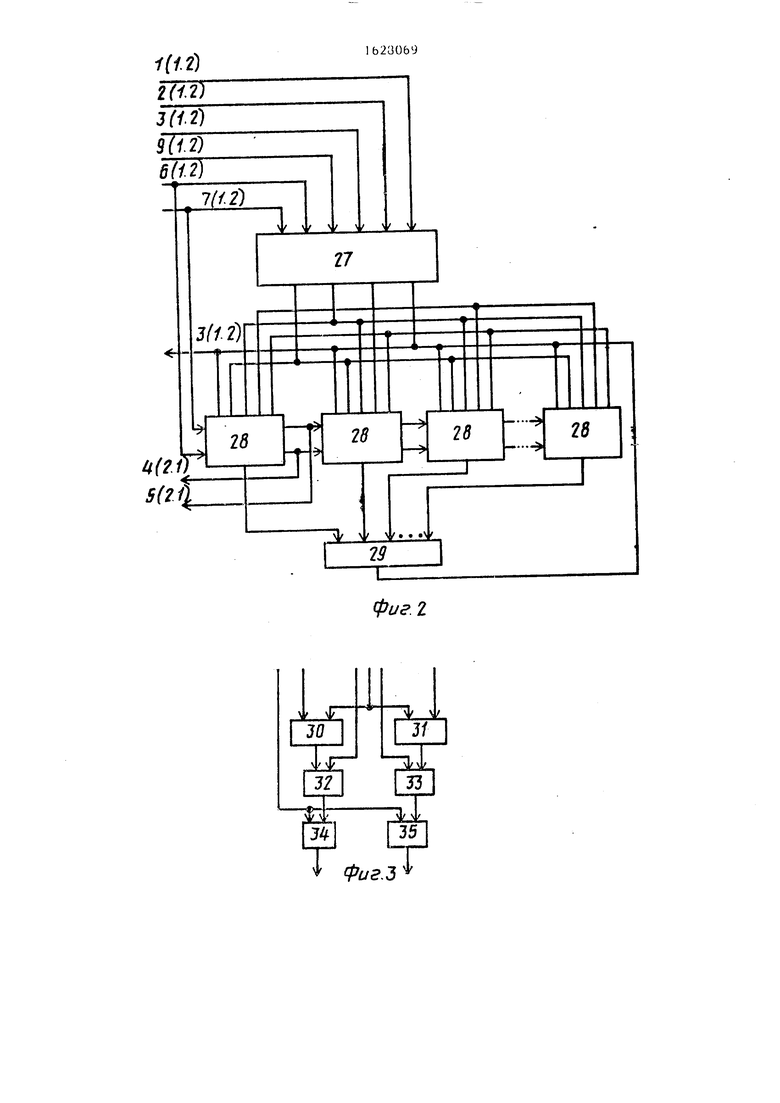
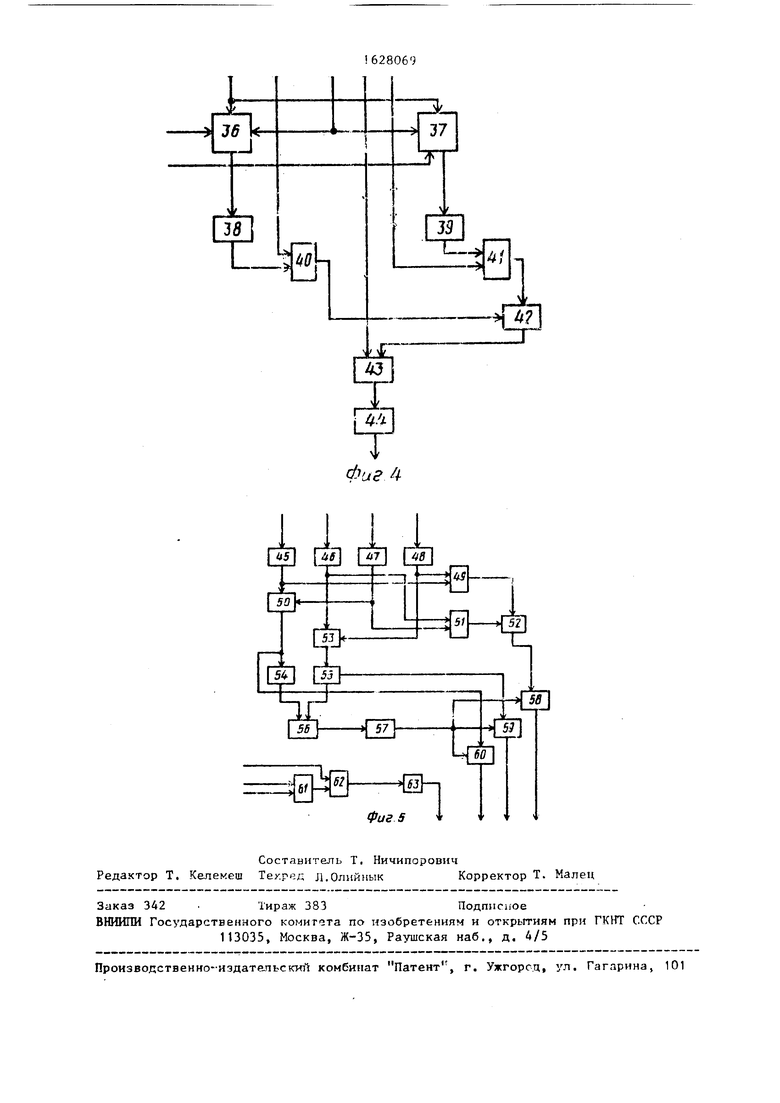
На фиг.1 и 2 представлена функциональная схема устройства; на фиг.З - схема блока формирования опорных координат; на фиг.4 - схема блока вычисления расстояний; на фиг. 5 - схема блока вычисления коэффициентов,
Устройство (фиг 1) содержит телевизионный датчик 1, элемент 2 задержки, первый блок 3 вычитания, первьп пороговый элемент 4, второй пороговый элемент 5, первый триггер 6 первый 7 и второй 8 элементы Ч, первый элемент ЧЛИ 9, генератор 10 импульсов, первый П, второй 12 и третий 13 делители частоты, счетчик 1 тактовых
импульсоо, счетчик 15 строчных ИМПУЛЬСОВ, второй элемент ИЛИ 16, счетчик 17 числа точек, первый 18 и второй 19 блоки элементов И, блок 20 памяти, третий элемент ИЛИ 21, регистр 22 координаты X, регистр 23 координаты Y, второй триггер 24, четвертый элемент
О N3
00
о о
со
ИЛИ 25, блок 26 формирования опорных координат, блик 27 вычисления коэффициентов, группу блоков 28 вычисления расстояний, пятый элемент ИЛИ 29. 5
Блок Формирования опорных координат (фиг.З) содержит первую 30 и вторую 31 группы элементов И, первую 32 и вторую 33 группы элементов ИЛИ, регистр 34 координаты X, регистр 35 ко- 10 ординаты Y,
Каждый из группы блок вычисления расстояний (фиг.4) содержит первый 36 и второй ЗУ регистры, первый 38 и второй 39 цифроаналоговые преобразо-15 вателн 39, первый 40 и второй 41 умножители, первый 42 и второй 43 вычи- татели, пороговый элемент 44,
Блок вычисления коэффициентов (фиг.5) содержит первый 45, второй 20 46, третий 47 и четвертый 48 цифроаналоговые преобразователи, первый умножитель 49, первый вычитатель 50, второй умножитель 51, третий вычитатель 52, второй вычитатель 53, первый 25 54 и второй 55 квадраторы, сумматор
56,функциональный преобразователь
57,первый 58, второй 59 и тре-тий 60 (делители, триггер 61, элемент И 62, одновибратор 63,
Работа устройства основана на следующих математических зависимостях. Согласно условиям принадлежности элемента контура изображения прямолинейному элементу задаются координаты элементов контура изображений AJ (X1.Y1), А2 (X2,Y2) и АО (XO.YO), при , причем считают, что элемент АО принадлежит прямолинейному элементу, соединяющему элементы А1 и А2 в том случае, если расстояние от этого элемента до прямой, проведенной через элементы А1 и А2, не превышает некоторого значения dmax. Уравнение прямой, проходящей 45 через элементы Al (Xl,Yl) и А2 (X2,Y2) запишется следующим образом:
Х-Х1 Y-Y1
Х2-Х1 Y2-Y1
или Y(X2-X1) - X(Y2-Y1) - (Y1-X2- 5Q Y2-Xl)0,
Расстояние de от точки АО (XO.YO) до этой1, прямой определяется уравнениями аналитической геометрии следующим образом;55 , , YO(X2-X1)-XO(Y2-Y1)-(Y1X2-Y2X1)
а «-
30
35
10
-(Y2-Y1)4+(X2-X1)2
(О
0
0 5
5
Q
5
Запишем это выражение так:
k. Х2-Х1
d YOp-XOq-k.,
о где р
0
5
0
4J(Y2-Y)4-i-(X2-XI)2 Y2-Y1
(2) (3)
(4)
(У2-У1)г + (Х2-Х1)г Если ,:dmQX, элемент AO(XO,YO) принадлежит прямолинейному элементу, соединяющему элементы A1(X1,Y1) и А2(Х2, Y2).
Устройство работает следующим образом,
В начальный момент времени все счетчики обнутены, на прямых выходах триггеров установлены нулевые сигналы. С началом анализа изображения генератор 10 импульсов вырабатывает последовательность синхроимпульсов для работы телевизионного датчика 1. Попе анализируемого изображения просматривается Б соответствии с законом телевизионной развертки: слева направо, сверху вниз. В первом блоке 3 вычитания последовательно вычисляется разность амплитуд, задержанных элементом 2 задержки сигналов,и незадержанных сигналов с выхода телевизионного датчика 1. Эта разность затем подается в первый и второй пороговые элементы 4 и 5..Первый пороговый элемент 4 срабатывает в случае превышения установленного порога при переходе от более яркого изображения к более темному, т.е. типа , второй пороговый элемент 4 - при переходе от более темного изображения к более яркому, т.е. типа . Таким образом, на выходах пороговых элементоп 4 и 5 появится сигналы в моменты пересечения электронным лучом контурного элемента изображения. Сигналы с выхода генератора 10 импульсов, частота которых первым делителем 11 частоты преобразовывается в частоту тактовых импульсов, поступают на счетный вход счетчика 14 тактовых импульсов, который подсчитывает координату X контурного элемента, Кроме того, импульсы с выхода первого делителя 11 частоты через второй делитель 12 частоты, имеющий коэффициент деления, равный числу элементов строки кадра, через второй элемент ИЛИ- 16 поступают на вход счетчика 15 строчных импульсов,
J 1
который подсчитывает Koopj,t алту Y контурного элемента, н на вход третье го делителя 13 частоты, имеющего чоэф фициент деления, равный количеству строк кадра.
Выделение прямопин-зйнчх элементов контура выпуклого изображения осуществляется в два этапа На первом этапе выделяются эле °нты левой половины контура, т,--, элементы, ллвые соседние которых нулевые. В момент, когда эляктрочмын луч пересекает перепад яркости типа , на выходе первого порогового эчемен- та 4 появляется информационны сигнал. Сигнап уровня 1 на инвеосном выходе первого rpiirrej a 6 цает возможность пройти информационному сигналу через перпый этемен I 7 на выход первого эчемгнт. 1ГТЛ 9, j i jr сигнал разрепенн на запись п регистр 22 координаты X ЗНЛЧРГИН счетчика 14 тактопь х импульсов и в регистр 23 координаты Y зшчоччя счетчика 15 строчных импульств, увечичч- зается на ециницу значение счетчика 17 числа точек, устанавливает телеь ;- зиочный датчик 1 в положены шчала следующей строки газгн-рт кн. обнуляет счетчик 14 тактовых импучьсов, увеличивает через второй ЧЛСМРНТ И 1Н 16 на единицу значение счетчина 15 строчных импульсов.
В момент, когда эчектронпый луч прч сканировании впервые пересекает перепад яркости, второй триггер 24 не изменяет своего состояния и через четвертый элемент ИIII 25 на выходах разрешения записи первого и второго регистров 36 и 37 блока 26 формирования опорных координат установится сигнал разрешения записи. Сигнал инверсного выхода второго триггера 24 дает возможность пройти информации с регистра 22 координаты X через первую группу элементов П 30 блока 26 формирования опорных координат и первую группу элементов iOi 32 блока 26 в регистр 34 координат X блока 26, а с регистра 13 координаты Y через вторую группу эгементов Н 31 блока 26 формирования опорных координат и вторую группу элементов ИЛИ 31 блока 26 - в регистр 35 координат Y блока 26 формирования опорных координат.
При втором пересечении электронным лучом перепада яркости на выходе числа 2 счетчика 17 числа точек, соедог
280646
ненном с входом установки 1 второго триггера 24, появляется сигнал, в результате чего на инверсном выходе второго триггера 24 сигнала не будет и информация с регистра 22 координаты X и регистра 23 координаты V не перепишется соответственно н регистр 34 координаты X п регистр 35 координаты Y
IQ блска 26 формирования опорных координат.
При третьем пересечении электроным лучом перепада яркости счетчнк 17 числа точек устанавливает единичный
15 уровень на выходе числа 3, включает этим сигналом триггер 61 блока 27 вычисления коэффициентов, на обоих входах элемента И 62 блока 27 вычисления коэффициентов устанавли20 паются единичные сигналы, сигнал на его ыходе включает одновибратор 63 блока 27 вычисления коэффициентов, который, создавая кратковременный импульс, позволяет переписать координл25 ты предыдущего элемента из регистра 22 координаты X и регистра 23 координаты Y соответственно в первый 36 и второй 37 регистры первого блока 28 вычисления расстояний. В регистр 22
30 координаты X и регистр 23 координаты Y -запишутся координаты третьего элемента. Все регистры выполнены по схеме с буферным регистром, вследствие чего устраняется возможность потери информации.
Сигналы с выхода регистра 34 координаты Х,р гнстра 35 координаты Y блока 26 Формировать опорных координат, регистра 22 координаты X и ре- до гистра 23 координаты Y поступают на входы соответственно первого 45, второго 46, третьего 47 и четвертого 48 цифроаналоговых преобразователей блока 27 вычисления коэффициентов,
45 которые преобразуют сигналы в аналоговую форму.
В блоке 27 вычисления координат в первом вычитателе 50 вычисляется ,
50 разность координат X, во втором вычитателе 53 - разность координат Y, Полученные значения возводятся в квадрат соответственно первым 54 и вторым 55 квадраторами, суммируются сум55 матором 56 и поступают на вход функционального преобразователя 57, который вычисляет среднеквадратическое значение, поступающее затем на входы первого 58, второго 59 и третьего 60
35
делителей. На вход делимого первого делителя 58 поступает разность координат X с первого вычитателя 50. В результате на выходе первого дели- теля 58 определяется сигнал значения р (2), Разность координат Y с выхода второго вычктателя 53 поступает на вход делимого второго делителя 59, на выходе которого устанавливается сигнал значения q (3)„ Первый 49 и второй 51 умножители вычисляют соответственно произведения и Y2«X1, разность между которыми вычисляется в третьем вычитателе 52 и по- ступает на вход Аделимого третьего делителя 53. На выходе последнего устанавливается сигнал значения k (4)
В первом блоке 28 вычисления расстояний координаты проверяемой точки,
записанные в первом 36 и втором 37 регистрах, преобразовываются соответственно первым 38 и вторым 39 циф- роаналоговыми преобразователями в аналоговую форму. В первом 40 и втором 41 умножителях происходит умножение соответственно координаты X на коэффициент q, а координаты Y на коэффициент р. Разность между ними определяется первым вычнтателем 42. Второй вычитатель 43 вычитает из полученной разности коэффициент k, В результате на входе порогового элемента 44 устанавливается сигнал, эквивалентный значению d (1). Если этот сигнал не превышает величину сигнала, эквивалентного d, в устройство вводится следующий элемент контура и повторяются описанные процессы. При этом произойдет последовательный сдвиг ин- формации; во второй блок 28 вычисления расстояний перепишутся координаты второго элемента, а в первый блок вычисления расстояний 28 перепишутся координаты третьего элемента. Ее- ли и Теперь сигналы, эквивалентные расстояниям d для второго и третьего элементов, будут меньше пороговых, в устройство введется следующий сигнал, и повторятся описанные процес- сы с дальнейшим последовательным сдвигом информации из регистров предыдущего блока 28 вычисления расстояний в соответствующие регистры последующего блока 28 вычисления расстояний.
Пусть на каком-то шаге работы устройства сигнал, эквивалентный расстоянию от элемента контура до прямолинейного элемента, превысит пороговое значение. При этом на выходе порогового элемента 44 соответствующего блока 28 вычисления расстояний появится сигнал который пройдет на вход пятого элемента ИЛИ 29. Этот сигнал через третий элемент ИЛИ 21 дает разрешение на запись в блок 20 памяти координат опорной точки из регистра 34 координаты X и регистра 35 координаты Y блока 26 формирования опорных координат, а также дает разрешение на .запись координат предпоследнего элемента контура из первого 36 и второго регистров 37 первого блока 28 вычисления расстояний соответственно через первый 18 и второй 19 блоки элементов И блока 26 формирования опорных координат, где соответственно через первую 32 и вторую 33 группы элементов ИЛИ координат запишутся-в регистр 34 координаты X и регистр 35 координаты У, установит сигналы на выходе числа 2 счетчика 17 числа точек, установит в нулевое состояние триггер 61 блока 27 вычисления коэффициентов, обнулит первые 3 и вторые 37 регистры всех блоков 28 вычисления расстояний. После этого в устройство вводится новый элемент контура и повторяются описашгые процессы.
Когда телевизионный датчик 1 про- сканирует все поле изображения, на выходе третьего делителя 13 частоты появится сигнал, который через третий элемент ИЛИ 21 дает разрешение на запись в блок 20 памяти координат последней опорной точки из регистра 34 координаты X блока 26 формирования опорных координат и регистра 35 координаты Y этого же блока. Этим Оканчивается процесс выделения прямолинейных элементов левой части контура изображения. Этот же сигнал перекидывает первый триггер 6, обнуляет счетчик 17 числа точек и устанавливает в исходное состояние второй триггер 24. Затем начинается выделение прямолинейных элементов первой части изображения, т.е. контурных элементов тип . При этом сигналы на выход первого элемента ИЛИ 9 поступают с второго порогового элемента 5 через второй элемент И 8. После описанных процессов после появления сигнала на выходе третьего делителя 13 частоты в блоке 20 памяти оказываются записанными координаты всех искомых элементов контура, т.е. вершин прямолинейных элементов.
На этом процесс выделения прямолинейных элементов заканчивается.
Таким образом, введение новых элементов и связей позволяет устраните последовательную проверку принадлежности элемента контура прямолинейному элементу при всех возможных значениях его угла наклгч: за счет параллельной проверки принадлежности прямолинейному элементу всех рассматриваемых элементов контура. Устранение последовательной проверки услинчя принадлежности при всех возможных углах наклона позволяет также устранить погрешность, обусловленную дискретностью набора углов наклона, что поп i шает точность у;тройства.
Формула
з о б р е
е н и я
1. Устройство для выделения пт Чмоли- нейных элементов контурл въ пуклпго и ю бражения,содержащие телеин ионный датчик, элемент задержки, бтокгычг- тания, перьын и второй пороговые элементы, счетчик тактовых импульсом, счетчик строчных импульсоч, бпок памяти, первый и второй блоки элементов II, регистр координаты Х регистр координаты Y, первый элемент i, выход телевизионного датчика соединен г первым входом первого блока вычитания и входом элемента задержки, выход которого соединен с вторым входом первого вычитания, выход которого соединен с входом первого и второго пороговых элементов, выход пер- вого порогового элемента соединен с вторым входом первого элемента И, отличающееся тем, что, с целью повышения точности устройства,
0
5
0
5 о с 0
го элемента ИЛИ и входом третьего делителя частоты, ьыход котсрого соединен с R-нходом первого триггер входами установки нуля счетчика числа точек, R-входом второго триггера it первым входом четвертого элемента ПлИ, выход которого соединен с входом разрешения записи блока памттм, пыход первого блока вычитания соединен с входом второго порогового элемента, выход которого соединен с вторым входом второго элемента И, первый пход которого соединен с прямым выходом первого триггера, инверсный выход которого соединен с перлым входом первого элемента Н, выход которого cotr дннен с пергым входом первого элзмен- та ИЛИ, второй вход которого соеднне- с выходом второго элемента И, выход первого элемента ИЛИ соединен с пхо- дом установки нуля счетчика тактовых импульсов, счетным входом ечетчнкг чч-ni точек, синчровходом тслсвизион- 4V j датчика, входами разрешения записи регистра координаты X и регистра , координаты У, с пятым входом блока вычисления коэффициентов и вт фым входом второго элемент 1. 11ЛН, выход которое соединен со счетным входом счетчика строчных импульсов, выход третьего элемента И ПИ сосцине с установочным входом счетчика числа точгк, третьими входами каждого из iруппы блоков вычисления расстояний, первыми входами первого и второго блоков элементов И, вторым входом четвертого элемента ИЛИ, седьмым входон блока вычисления коэффициентов и пергзым
РХОДОМ пятого элемента ИЛИ, выходы счетчика тактовых импульсов и счетчика строчных импульсов соединены соответственно с информационными входами регистра координат X и регист

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ С ИЗМЕНЕНИЕМ МАСШТАБА УПРАВЛЯЕМОГО ФРАГМЕНТА | 1993 |
|
RU2065206C1 |
| СПОСОБ УПРАВЛЕНИЯ ДУБЛИРОВАННОЙ СИСТЕМОЙ С ЗАДЕРЖКОЙ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 1999 |
|
RU2147162C1 |
| Устройство для преобразования координат | 1989 |
|
SU1681313A1 |
| Бортовое радионавигационное устройство | 1988 |
|
SU1647486A1 |
| ПРИЕМОИНДИКАТОР РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2027196C1 |
| Устройство для формирования изображения | 1987 |
|
SU1474633A1 |
| Устройство для нормализации изображений объектов | 1984 |
|
SU1211771A1 |
| Цифровой квадратичный интерполятор | 1985 |
|
SU1290354A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЭТАЛОННОЙ КАРТЫ МЕСТНОСТИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 1992 |
|
RU2022355C1 |
Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для распознавания , и может использоваться в системах автоматического анализл изображений для распознавания прямолинейных элементов контура выпуклого мэоб- т-аж(..кия. Цепь изобретения - повышение точности устройстьз за счет устранения погринчости, обусловленной дискретностью набора углов наклона. Устройство содержит телернзиснньш дгiчнк, элемент задержки, блок вычиташ.я, два пороговых элемента, два триггера, два элем( нта И, пять элементен НЛП, генератор импульсоь, три делителя частоты три счетчика, два блока элементов П, блок памяти, два регистра, блок формирования опорных координат, блок Q ления коэффициентов и группу Злоков вы-й числения расстояний. 3 з.п. ф--лы, 5 ил. СЛ С
оно содержит первый и второй триггеры,45 Ра координат Y, первый выход счетчи- счетчик числа точек, второй элемент И, первый - пятый элементы ИЛИ, генератор импульсов, первый, второй и третий делители частоты, блок формирования . опорных координат, блок вычисления сп коэффициентов, группу блоков вычисления расстояний, выход генератора импульсов соединен с входом синхроимпульсов телевизионного датчика- и входом первого делителя частоты, выход которого соединен со счетным входом счетчика тактовых импульсов и входом второго делителя частоты, выход которого соединен с первым входом второ55
а числа точек соединен с S-входом второ о триггера, инверсный выход которого соединен с первым входом бло ка Формирования ОПОРНЫХ координат и вторым входом пятого элемег а ИЛИ, второй выход счетчика числа точек сое дине} с шестым входом блока вычисления коэффисиеитон, рыход пятого элемента ИЛИ соединен с пятим входом бло ка формирования опорных координат, вторые входы первого и второго блоков элементов И соединены соответственно с первым и вторым выходами первого из группы блоков вычисления расстояний,
45 Ра координат Y, первый выход счетчи- сп
5
а числа точек соединен с S-входом второ о триггера, инверсный выход которого соединен с первым входом блока Формирования ОПОРНЫХ координат и вторым входом пятого элемег а ИЛИ, второй выход счетчика числа точек сое- дине} с шестым входом блока вычисления коэффисиеитон, рыход пятого элемента ИЛИ соединен с пятим входом блока формирования опорных координат, вторые входы первого и второго блоков элементов И соединены соответственно с первым и вторым выходами первого из группы блоков вычисления расстояний,
выходы регистра координаты X и регистра координаты Y соединены соответственно с первым и вторым входами первого из группы блоков вычисления расстояний, с первым и вторым входами блока вычисления коэффициентов, с вторым и третьим входами блока формирования опорных координат, выходы первого и второго блоков элементов И соединены соответственно с четвёр- т.ым и шестым входами блока формирования опорных координат, первый и второй выходы которого соединены соответственно с входами записи блока па- 15 опорной координаты Y, первые входы
мяти, третьим и четвертым входами блока вычисления коэффициентов, первый, второй, третий и четвертый выходы блока вычисления коэффициентов соединены соответственно с четвертым, шестым, пятым и седьмым входами каждого из группы блоков вычисления расстояний, первые и вторые выходы каждого из которых, кроме последнего блока группы, соединены соответственно с первым и вторым входами последующих блоков вычислений расстояний, третьи выходы всех блоков вычислений расстояний соединены с соответствующими входами третьего элемента ИЛИ,,
2С Устройство по п. отличающееся тем, что -каждый из блоков вычисления содержит первый и второй регистры, первый и второй циф- роаналоговые преобразователи, первый и второй умножители, первый и второй вычитатели и пороговый элемент, информационные входы регистров являются CO ответственно первым и вторым входами блока, входы разрешения записи регистров соединены и являются третьим вхо- дом блока, входы установки нуля ре- гистров соединены и являются четвертым входом блока, выходы первого и второго регистров соединены соответственно с входами первого и второго цифроаналоговых преобразователей и являются первым и вторым выходами блока, выходы первого и второго цифроаналоговых преобразователей соединены с первыми входами соответственно первого и второго умножителей, вторые входы которых являются соответственно питым и шестым входами блока, выходы первого и второго умножителей подключены соответственно к первому и второму входам первого вычитателя, выход
.
которого соединен с первым входом второго вычитателя, второй вход которого является седьмым входом блока, выход второго вычитателя соединен с входом порогового элемента, выход которого являе тся третьим выходом блока.
3, Устройство по п. 1, отличающееся тем, что блок формирования опорных координат содержит первую и вторую группы элементов И, первую и вторую группы элементов ИЛИ, регистр опорной координаты X, регистр
45
Qпервой и второй групп элементов И объединены и являются первым входом блока, второй вход первой группы элементов И является вторым входом блока,
2Q второй вход второй группы элементов И является третьим входом блока, второй вход второй группы элементов ИЛИ является четвертым вхлдом блока, входы разрешения записи регистров опорных
25 координат X и Y объединены и являются пятым входом блока, второй вход первой группы элементов ИЛИ является шестым входом блока, выходы первой и второй групп элементов И подключены соот30 ветственно к первым входам первой,и второй групп элементов ИЛИ, выходы которых подключены соответственно к информационным входам регистра опорной координаты X и регистра опорной коор,- динаты Yr выходы регистра опорной
50
5
координаты X и регистра опорной коорг- динаты Y являются соответственно первым и вторым выходами .блока.
А. Устройство по п. 1, отличающееся тем, что блок вычисления коэффициентов содержит первый четвертый циФроаналоговые преобразователи, первый, второй и третий вычитатели, первый и второй умножители, первый и второй квадраторы, первый, второй и третий делители, сумматор, функциональный преобразователь, триггер, элемент И и одновибратор, информационные входы первого и второго третьего и четвертого цифроаналоговых преобразователей являются соответственно первым, вторым, третьим и четвертым входами блока, первые входы первого вычитателя и первого умножителя объединены и подключены к выходу первого цифроаналогового преобразователя, первые входы второго вычитателя и второго умножителя объединены и подключены к выходу второго
цифроаналогового преобразователе, вторые входы первого зычитателя и второго умножителя объединены и подключены к выходу третьего циррозна- лотового преобразователя, рторые входы второго чычитателя и первого умножителя объединены и подключены к выходу четвертого цисЬроаналогового прэ образователя, выходы первого и пторого умножителей соедине С-i соответственно с первым и вторым входами третьего вычитателя, выход которого подключен к первоьгу входу третьего делителя, входы первого и второго квадраторов объединены соответственно с первыми входами второго и первого делителей и подключены к выходам соответственно первого и второго пычит.-ге; s;i, выходы первого и второго кчадтатомс подключены соо п тгттж1 - - перг сму и второму входам суммгторл, nv- - .од которого подключен к r,yof / Функционального иреэбрачонл i LJIH, т.и;.од Kcroooio подклк Че к объЈ у неь:гы вторым входам перного, второго ч трг тьего дели гапе), выходы lorjpbx являются гоответстиенно вторим, третьи ч и четвертым бтска, S-вход триггера и R-вход триггера являются соответсгчелно шесть - и содь.1ым входа. i Олока, выход триггера подключен к первому входу элемента И, второй аход которого япллится г я .-мм входом б., а дыхо, подключен к ьхолу одновмбр;|Торл, выход котрого являете первым выходом блока.
А Ј гпф
1
SЈ
Ј
ЈЈ
ZЈ
/ f
7E--, U
i v
OH
1 гпф
б9опгч|
(2/
Фиг 4
Л Л
rig rag
ItJ И,3 г
г
50
47 Ив
5Z|
-HJL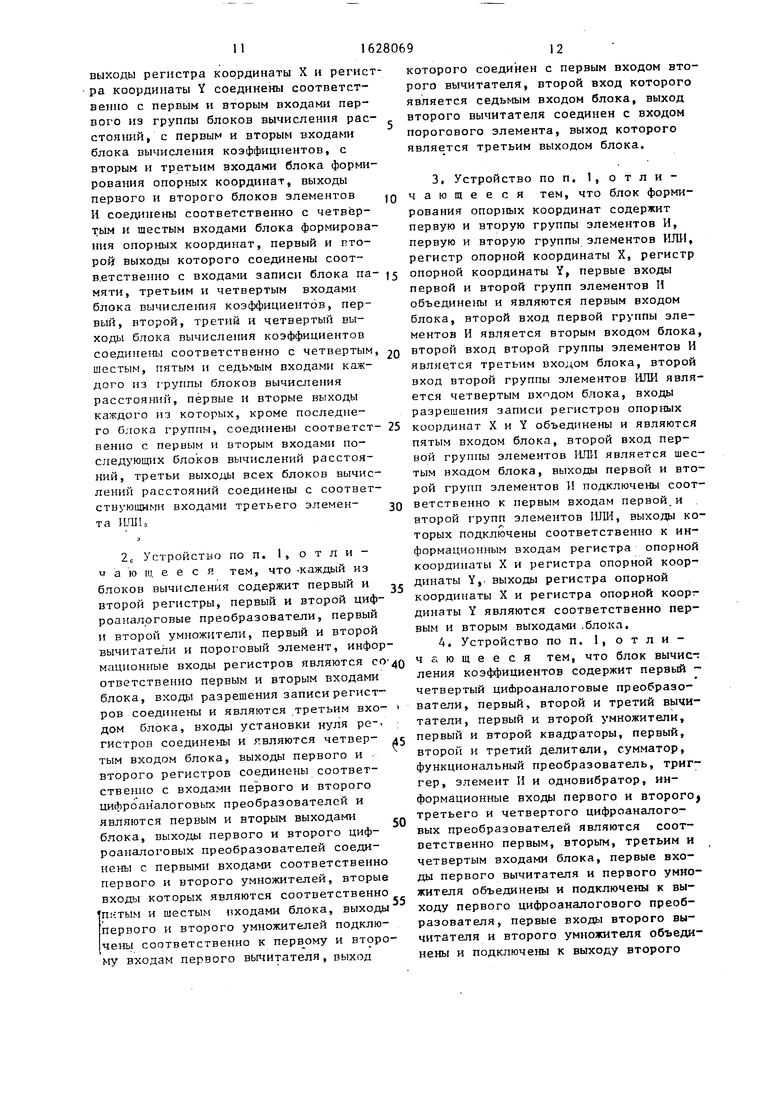
| Устройство для распознавания прямого края объекта | 1979 |
|
SU926691A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для распознавания прямолинейных элементов изображений | 1979 |
|
SU873252A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
