Изобретение относится к движителям транспортных средств, предназначенных для передвижения на местности со сложным рельефом и грунтами, имеющими низкую несущую способность.
Известны транспортные средства, предназначенные для передвижения по пересеченной местности с грунтами, имеющими низкую несущую способность, такие, например, как колесные машины с шинами низкого давления, гусеничные машины, суда на воздушной подушке (А.А.Афанасьев и др. «Проектирование полноприводных колесных машин», изд. МГТУ им. Н.Э.Баумана, 1999 г.; Н.А.Забавников «Основы теории транспортных гусеничных машин», М.: Машиностроение, 1968 г.; Р.И.Крыхтин и др. «Трансмиссия гусеничных и колесных машин», М.: Машиностроение, 2001 г.; И.А.Иванов и др. «Расчет конструкций наземных транспортных средств на воздушной подушке», «Недра», 2001 г.).
Упомянутые транспортные средства, оснащенные различного рода движителями, имеют свои достоинства и недостатки, связанные, в первую очередь, с особенностями конструктивного исполнения.
Так, к недостаткам транспортных средств колесного типа, в том числе с шинами низкого давления, можно отнести:
- большую зависимость от сцепных качеств грунта;
- прямую зависимость от размеров преодолеваемых препятствий от величины диаметра колес транспортного средства;
- сложность и громоздкость трансмиссии для оптимального распределения крутящего момента по всем ведущим колесам полноприводных машин.
Движение колесных машин по грунтам с низкой несущей способностью характеризуется проваливанием ведущих колес в грунт, которое происходит до момента достижения равенства несущей способности грунта давлению на грунт колесом.
Из известных математических соотношений следует, что показатель проходимости колесных машин находится в прямой зависимости от увеличения диаметра колес. При этом с ростом линейных размеров мощность двигателя растет квадратично, а масса - в кубической пропорции. Таким образом, наращивание проходимости за счет увеличения радиуса колес «съедается» лавинообразным ростом массы машины при значительном отставании роста мощности двигательной установки.
Гусеничные машины, обладая высокой проходимостью по сложнопересеченной местности, имеют, однако, такие серьезные недостатки как, например, значительное возрастание сопротивления повороту при маневрах.
Сила тяги у гусеницы зависит только от коэффициента сцепления с грунтом, а сопротивление движению зависит от глубины проваливания в грунт машины в целом. При этом распределение давления на грунт и в состоянии движения отличается значительно меньше, чем у колесных машин. Пределом проходимости гусеницы по слабонесущим грунтам является равенство мощности, затрачиваемой на проминание грунта при движении с заданной скоростью, реализуемой мощности по сцеплению с грунтом при той же скорости движения. Гусеничный движитель схож с колесным в том, что каждый следующий каток добавляет глубину проминания колеи. И если глубина станет глубже клиренса машины, то гусеничная машина повиснет на «брюхе» так же, как и колесная. Но степень добавления глубины колеи от прохода очередного катка меньше, чем у колеса равной нагруженности, радиуса и ширины. Каток идет по грунту опосредованно через гусеницу, а кривизна гусеницы при вминании в грунт определяется не самим радиусом катка, а размером звеньев гусеницы и их взаимным угловым положением при данном акте нагружения.
Серьезным недостатком гусеничной машины является ее значительный вес, необходимый для создания прочности и сохранения целостности движителя при движении по твердым неровностям.
К недостаткам судов на воздушной подушке можно отнести, в частности:
- способность передвижения по пересеченной местности с преимущественно горизонтальной поверхностью;
- относительно низкая маневренность и неспособность к преодолению препятствий со значительным наклоном;
- зависимость от направления ветра во время передвижения;
- высокая энергоемкость и большие габариты.
Известный пневмогусеничный движитель по патенту РФ 2240250, 2004 г., кл. В 62 D 55/247, являющийся наиболее близким по технической сущности и достигаемому результату к предлагаемому движителю и взятый за прототип, совмещает в себе внешние черты пневмоколес низкого давления и принцип движения гусеничного движителя. Он содержит силовую платформу с передающими валками, пневматическую оболочку, источник избыточного давления и устройство привода валков. При этом внутри пневматической оболочки, выполненной водо- и воздухонепроницаемой и находящейся под избыточным давлением, размещена с возможностью зависания над поверхностью движения силовая платформа с передающими валками, обеспечивающая перемещения транспортного средства за счет перекатывания передающих валков по внутренней поверхности пневматической оболочки.
Известный пневмогусеничный движитель при движении через препятствия ведет себя как колесная машина с пневматическими колесами большого радиуса, но со сверхнизким центром тяжести, а при движении по слабым грунтам - как гусеничная машина со сверхнизким давлением на грунт и практически равномерным распределением давления от катков на гусеницу (число катков, стремящихся к бесконечности).
При однократном проходе транспортного средства с пневмогусеничным движителем равномерное распределение давления на грунт обеспечивает однократный акт нагружения грунта, снижение трамбующего эффекта и соответственно снижение во много раз скорости образования келейности на поверхности передвижения.
При равной полезной нагрузке и давлении на грунт транспортное средство с пневмогусеничным движителем оказывается значительно легче, чем, например, гусеничная машина обычного исполнения, в частности, благодаря следующим факторам:
- гусеницы гусеничной машины должны быть по определению массивнее, чем гибкая оболочка пневмогусеничного движителя, так как должны выдерживать воздействие опорных катков при движении по твердым неровностям;
- пневмогусеничный движитель не нуждается в поддерживающих катках и элементах их подвески.
Таким образом, известный пневмогусеничный движитель транспортного средства позволяет существенно увеличить по сравнению с известными типами движителей аналогичного назначения грузоподъемность и обеспечить высокую проходимость при передвижении на местности со сложным рельефом и с грунтами, имеющими низкую несущую способность.
Недостатками этого движителя являются большие габариты пневматической оболочки и высокие требования к прочности на ее разрыв.
Решаемой технической задачей заявляемого изобретения являются уменьшение габаритов пневматической оболочки и снижение требований по прочности на ее разрыв, что обеспечивает повышение эксплутационных свойств транспортного средства в целом.
Для решения поставленной задачи в движитель транспортного средства, содержащего силовую платформу с передающими валками, устройство привода валков, источник избыточного давления, пневматическую оболочку, выполненную водо- и воздухонепроницаемой и находящуюся под избыточным давлением, внутри которой размещена с возможностью зависания над поверхностью движения силовая платформа с передающими валками, обеспечивающая перемещения транспортного средства за счет перекатывания передающих валков по внутренней поверхности пневматической оболочки, введен, по меньшей мере, один внешний валок, установленный снаружи пневматической оболочки и опирающийся на нее.
Количество внешних валков составляет один или более в зависимости от задач, решаемых транспортным средством.
Заявляемое изобретение поясняется чертежами, на которых представлены:
фиг.1 - схема общего вида предлагаемого движителя;
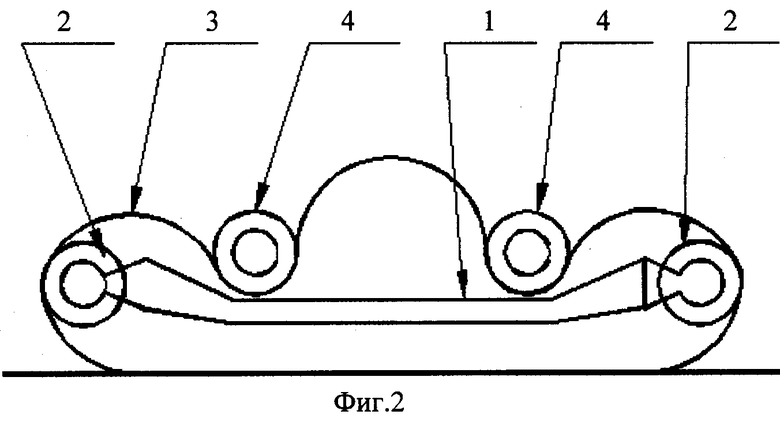
фиг.2 - схема исходного положения (на горизонтальной поверхности);
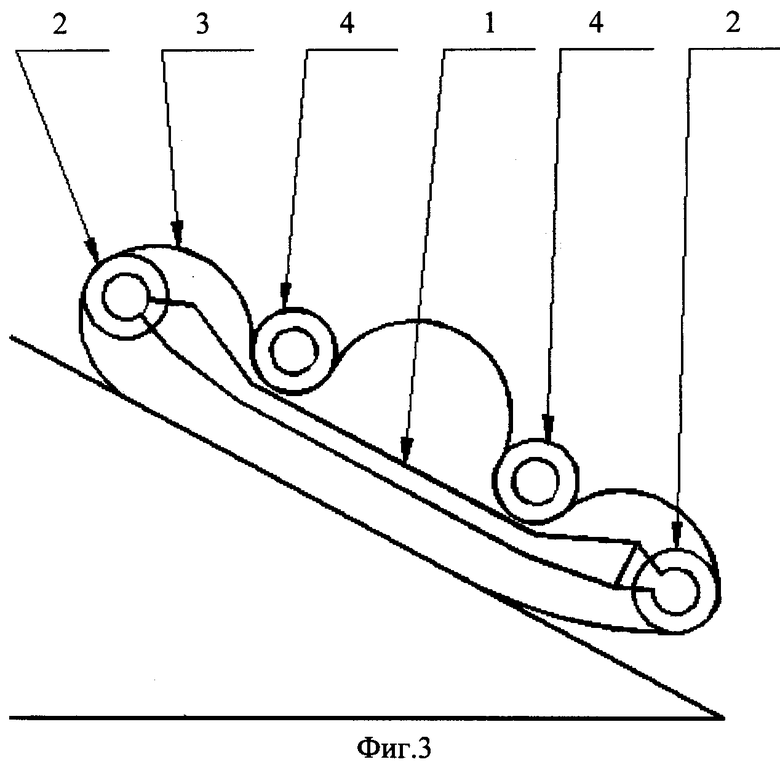
фиг.3 - схема текущего положения (на наклонной поверхности);
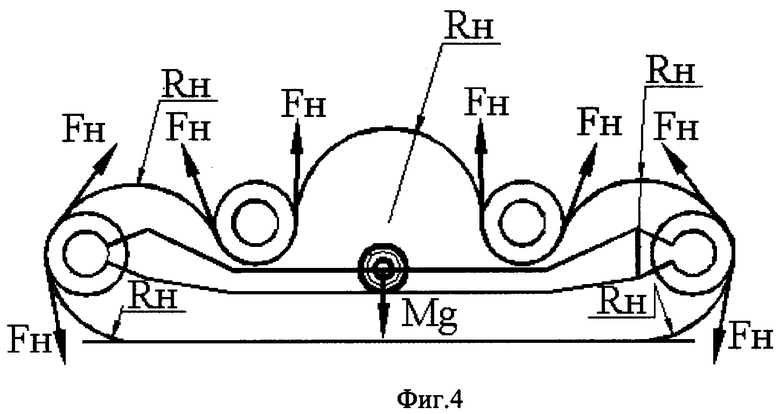
фиг.4 - схема действующих на валки сил при статическом положении движителя на горизонтальной поверхности;
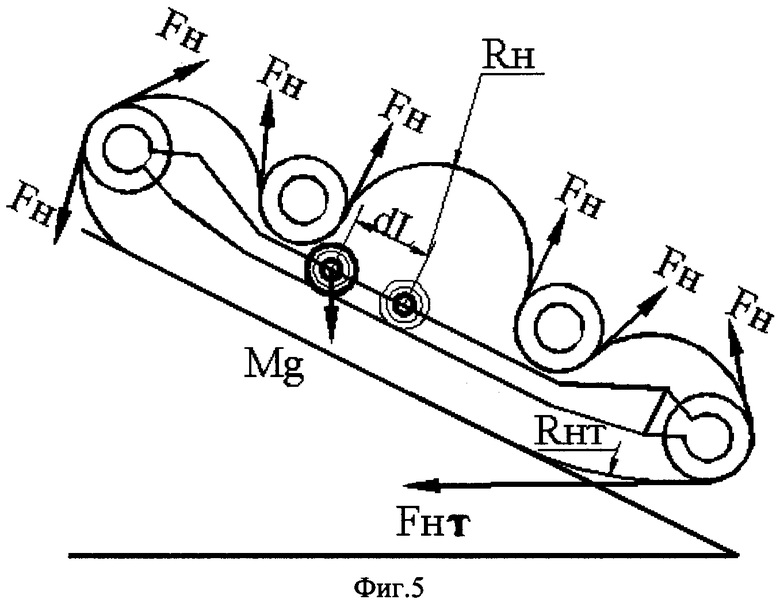
фиг.5 - схема действующих на валки сил при статическом положении движителя на наклонной поверхности.
Согласно изобретению пневмогусеничный движитель - (фиг.1) включает силовую платформу 1 с передающими валками 2, пневматическую оболочку 3, внешние валки 4, источник избыточного давления и устройство привода валков. Источник избыточного давления и устройство привода валков на схеме общего вида условно не показаны по следующим соображениям.
В качестве источника избыточного давления может быть использован любой из известных видов воздушных нагнетателей, например насос, компрессор, газобаллонная станция. При этом такой источник избыточного давления в одном случае конструктивно может быть выполнен непосредственно на силовой платформе, а в другом являться независимым от движителя воздушным нагнетателем, который подключается к оболочке пневмогусеничного движителя для его приведения в исходное положение или при необходимости изменения величины избыточного давления в оболочке при изменении характеристик собственно движителя.
Устройство привода валков предназначено, в конечном счете, для создания поступательного движения пневмогусеничного движителя, которое может осуществляться как в активном, так и в пассивном режиме. В первом случае - в активном режиме - устройство привода валков размещается непосредственно на силовой платформе и его роль может выполнять, например, электродвигатель. Во втором случае - в пассивном режиме - в качестве устройства привода валков используется внешний механизм (буксир, толкач), который обеспечивает принудительное движение пневмогусеничного движителя,
Пневматическая оболочка, в которой размещаются основные узлы пневмогусеничного движителя, может быть выполнена из полимерной ткани со специальной пропиткой, например из прорезиненной ткани. Материал оболочки должен быть водо- и воздухонепроницаемым, иметь высокую прочность на разрыв и низкую изгибную жесткость, а также способность выдерживать циклические изгибные деформации.
Принцип работы пневмогусеничного движителя заключается в следующем.
В исходном положении, перед началом движения, в пневматической оболочке создается избыточное давление, в результате чего силовая платформа зависает (вывешивается, удерживается) над поверхностью движения - грунтом - фиг.2. Удержание платформы осуществляется за счет натяжения оболочки избыточным давлением, равным удельному давлению на грунт в пятне контакта.
В этом случае натяжение пневматической оболочки выражается формулой

где Fн - сила натяжения оболочки,
Р - избыточное давление газа внутри оболочки;
Rн - радиус кривизны оболочки.
При равных радиусах всех свободных участков оболочки (Р=const) равнодействующая сил натяжения на валках имеет вертикальную составляющую, за счет чего и обеспечивается зависание силовой платформы над грунтом.
Пневмогусеничный движитель имеет также возможность передвижения по наклонной поверхности - фиг.3.
Силовая схема при статическом положении пневмогусеничного движителя на горизонтальной поверхности представлена на фиг.4.
Силовая схема движения пневмогусеничного движителя по наклонной поверхности представлена на фиг.5.
Самостоятельное движение происходит при приложении крутящего момента на один или несколько валков. В этом случае величина крутящего момента выражается формулой:

где Fт - сила тяги, реализуемая ведущим валком;
r - радиус ведущего валка.
На ведущем валке создается дополнительное усилие натяжения оболочки на участке «валок - грунт» и сила натяжения оболочки на этом участке становится равной:
Fнт=P·Rнт=Fн+Fт,
где Rнт - радиус кривизны натянутого ведущим валком участка оболочки;
Fт - сила тяги, реализуемая ведущим валком.
В результате равнодействующая сил натяжения оболочки на ведущем валке увеличивается по модулю и изменяется по направлению. Вся система оказывается в неуравновешенном положении и начинает движение. При этом силовая платформа начинает катиться по внутренней поверхности оболочки, не касающейся поверхности передвижения.
Для сохранения положения платформы параллельным грунту возможно использование смещения центра тяжести движителя на величину dL. Величина dL задается в зависимости от условий движения и параметров конкретного движителя.
Смещение центра тяжести на величину dL обеспечивается перемещением по платформе грузов и противовесов.
При отсутствии смещения dL движитель самоуравновешивается в наклонном положении относительно грунта.
Внешние валки приминают натянутую оболочку, тем самым уменьшая ее радиус, что приводит к уменьшению силы натяжения в оболочке при постоянном давлении.
Из формулы (1) для силы натяжения оболочки следует, что при снижении Rн пропорционально уменьшается и сила Fн.
В результате снижения постоянно действующих сил натяжения оболочки появляется возможность снизить требования к прочности материала пневматической оболочки.
Уменьшение радиуса натяжения оболочки Rн обеспечивает уменьшение габарита по высоте пневмогусеничного движителя. При этом также обеспечивается дополнительное увеличение высоты зависания платформы над поверхностью при равных давлении на грунт и полезной нагрузке.
Предлагаемый пневмогусеничный движитель может быть реализован с использованием известных конструкционных материалов и комплектующих узлов. Практическое осуществление заявляемого изобретения подтверждается теоретическими исследованиями и расчетами, а также испытаниями экспериментального образца пневмогусеничного движителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2005 |
|
RU2299825C1 |
| ПНЕВМОГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2240250C1 |
| ПНЕВМОГУСЕНИЧНЫЙ БЕЗОСЕВОЙ ДВИЖИТЕЛЬ С ВНЕШНИМ ПРИВОДОМ НА ГУСЕНИЦУ | 2006 |
|
RU2339535C2 |
| ШАГАЮЩИЙ ХОД И САМОХОДНАЯ МАШИНА НА ЕГО ОСНОВЕ | 2011 |
|
RU2452647C1 |
| Движитель повышенной проходимости на пневмогусенице на воздушной подушке | 2016 |
|
RU2675725C2 |
| Мобильное колесно-гусеничное шасси автономного робототехнического комплекса | 2022 |
|
RU2784975C1 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| СНЕГОХОД | 2010 |
|
RU2445226C1 |
| ПНЕВМОГУСЕНИЧНЫЙ ВЕЗДЕХОД | 2015 |
|
RU2600402C1 |
| ДВИЖИТЕЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2022 |
|
RU2790731C1 |
Изобретение относится к движителям транспортных средств. Сущность изобретения заключается в том, что пневмогусеничный движитель транспортного средства содержит силовую платформу с передающими валками, устройство привода валков, источник избыточного давления и пневматическую оболочку. Пневматическая оболочка выполнена водо- воздухонепроницаемой и находится под избыточным давлением. Внутри нее размещена с возможностью зависания над поверхностью движения силовая платформа с передающими валками, обеспечивающая перемещения транспортного средства за счет перекатывания передающих валков по внутренней поверхности пневматической оболочки. В движитель введен, по меньшей мере, один внешний валок, установленный снаружи пневматической оболочки и опирающийся на нее. Техническим результатом является уменьшение габаритов пневматической оболочки и снижение требований по прочности на ее разрыв. 5 ил.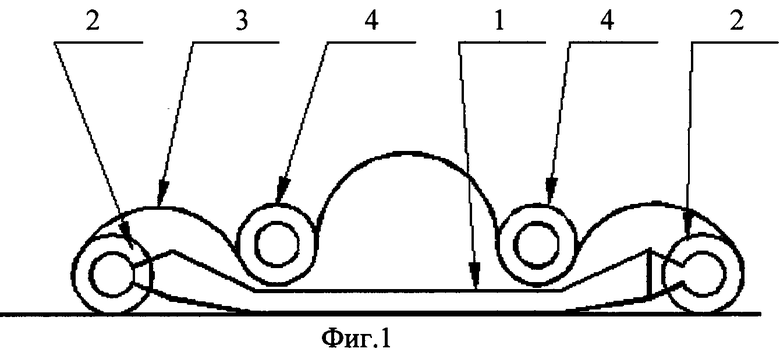
Пневмогусеничный движитель транспортного средства, включающий силовую платформу с передающими валками, устройство привода валков, источник избыточного давления, пневматическую оболочку, выполненную водо- и воздухонепроницаемой и находящейся под избыточным давлением, внутри которой размещена с возможностью зависания над поверхностью движения силовая платформа с передающими валками, обеспечивающая перемещения транспортного средства за счет перекатывания передающих валков по внутренней поверхности пневматической оболочки, отличающийся тем, что в движитель введен, по меньшей мере, один внешний валок, установленный снаружи пневматической оболочки и опирающийся на нее.
| ПНЕВМОГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2240250C1 |
| ГУСЕНИЦА С ВОЗДУШНЫМ НАДДУВОМ | 1998 |
|
RU2155691C2 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| GB 1079031 A, 09.08.1967. | |||

