Изобретение относится к конструкциям движителей транспортных средств и может быть использовано в конструкциях машин высокой проходимости а также в сельскохозяйственном машиностроении.
Общеизвестен колесный движитель, где в результате сцепления ведущих колес с опорной поверхностью их вращательное движение преобразуется в поступательное движение машины. При работе колесных движителей на переувлажненных и рыхлых опорных поверхностях и по бездорожью из-за значительного снижения сцепления с опорной поверхностью резко возрастает буксование, увеличиваются потери на самопередвижение и использование машины становится неэффективным или вообще невозможным. (См. книгу "Тракторы и автомобили". Под ред. В.А.Скотникова. М., Агропромиздат, 1985, с.328). Кроме того колесный движитель имеет высокое удельное давление, что в случае использования данного движителя при работе на полях ведет к нежелательному уплотнению и разрушению структуры почвы, а следовательно, к снижению урожайности. (См. книгу А.М.Гуревич, Е.М.Сорокин "Тракторы и автомобили". М., Колос, 1979, с.350).
Общеизвестен также гусеничный движитель, где опорные катки перекатываются по гладкому, относительно ровному искусственному пути, образуемому выстилающимися на опорной поверхности звеньями бесконечной гусеничной цепи. Зубья ведущих колес гусеничного движителя, зацепляясь за гусеницы, стремятся выдернуть их из-под опорных катков машины. Однако гусеницы прижаты к опорной поверхности весом машины, поэтому перекатить машину по гусеницам легче, чем выдернуть гусеницы из-под опорных катков. Большая площадь гусениц, соприкасающаяся с опорной поверхностью, обеспечивает движителю хорошее сцепление с ней, а значит, дает возможность развивать более высокие тяговые усилия в сравнении с колесным движителем. При одинаковых тяговых усилиях буксование гусеничного движителя меньше, масса гусеничном машины распределяется по значительно большей опорной поверхности, чем колесной. Благодаря этому достигается малое удельное давление на опорную поверхность, из-за чего гусеничные машины обладают повышенной проходимостью по рыхлым и влажным грунтам и оказывают меньшее уплотняющее воздействие на почву, уменьшаются и затраты мощности на движение машины. К недостаткам гусеничного движителя в сравнении с колесным относятся: повышенная металлоемкость, сложность конструкции и более высокая стоимость, большие потери на самопередвижение по твердым опорным поверхностям, меньшие транспортные скорости. (См. книгу "Тракторы и автомобили". Под ред. В.А.Скотникова. М., Агропромиздат, 1985, с.332). Кроме того при повороте гусеничной машины, обычно содержащей два гусеничных движителя по бокам платформы, необходимо устройство, отключающее внутренний по отношению к центру поворота гусеничный движитель вплоть до его полного затормаживания, либо как у трактора Т-150 включение неодинаковых передач на каждый движитель в трансмиссии, что значительно ее усложняет. Трансмиссию усложняет еще и устройство изменения частоты вращения ведущего колеса для изменения скорости движения и тягового усилия в отличие от шагающих движителей в живой природе, где скорость движения изменяется изменением длины шага. Также недостатком гусеничного движителя является то, что при повороте гусеницы относительно опорной поверхности поворачиваются юзом, что значительно увеличивает затраты мощности на поворот, и в случае двух движителей по бокам платформы тяги одного движителя при отключенном внутреннем к центру поворота бывает недостаточно, особенно на слабонесущих опорных поверхностях, для осуществления поворота. Этим и объясняется усложнение конструкции трансмиссии трактора Т-150 для обеспечения поворота включать неодинаковые передачи на бортовые движители. Причем крутой поворот осуществить данным способом невозможно, что осуществлено в военной технике путем дальнейшего усложнения трансмиссии, где обеспечена возможность включения заднего хода с приводом от двигателя на внутренний к центру поворота движитель. Также увеличение опорной поверхности как путем удлинения гусеницы, так и увеличения ее ширины ограничивается условиями возможности поворота на юз, где величина крутящего момента от силы тяги включенного движителя на плечо, равное колее - расстоянию между осевыми линиями через середины профилей гусениц, должна быть больше момента сопротивления повороту. По этим, а также конструктивным возможностям не представляется возможным использовать в качестве опорной поверхности ширину машины между внутренними краями гусениц.
Наиболее близким техническим решением является "Шагающий ход", содержащий опорную лыжу и механизм привода, где перемещение платформы осуществлено поочередным опиранием на лыжи и где за время опирания на лыжи платформа поднимается и перемещается по ходу движения, за время опирания на платформу лыжи поднимаются и перемешаются также по ходу платформы. (См. книгу А.Ф.Крайнев "Словарь-справочник по механизмам". М., Машиностроение, 1981, с.406…407).
Недостатком данного технического решения является невозможность изменения длины шага, а с ним и скорости движения и жесткости передачи движения от опорной лыжи на корпус платформы при сколь-нибудь значительных скоростях движения платформы.
Целью изобретения является упрощение конструкции трансмиссии машины путем исключения механизмов поворота ведущего моста или коробки передач, обеспечение возможности бесступенчатого регулирования скорости движения с упрощением трансмиссии, значительного снижения мощности при повороте по сравнению с гусеничным движителем на всех радиусах поворота, увеличение проходимости как тягача, так и при самопередвижении малины, снижение динамических нагрузок на платформу от взаимодействия опорной поверхности движителя на несущую поверхность (дорогу).
Поставленная цель осуществлена тем, что шагающий ход содержит платформу, на которой установлен кривошипно-ползунный механизм с кривошипом, ползуном и направляющей ползуна, и опорную лыжу, которая шарнирно соединена со свободным концом ползуна, а направляющая ползуна шарнирно закреплена на платформе в плоскости движения ползуна. На платформе дополнительно установлен силовой механизм перемещения по плоскости, на подвижном звене которого шарнирно закреплена направляющая ползуна в плоскости его движения. В кинематической цепи между платформой и опорной поверхностью лыжи установлен упругий элемент. Упругий элемент закреплен на лыже, с которым шарнирно соединен ползун, либо ползун выполнен телескопическим, между подвижными в осевом направлении частями которого установлен упругий элемент.
Самоходная машина на основе шагающего хода содержит платформу с двигателем, трансмиссией и устройствами управления, на каждом боковом борту которой установлены несколько шагающих ходов, кривошипы которых кинематически соединены и развернуты по углу поворота относительно друг друга, а перемещение направляющих ползунов относительно каждого бокового борта платформы обеспечено независимыми от другого борта силовыми механизмами, управление которыми осуществлено рулевым устройством и устройством изменения скорости движения самоходной машины.
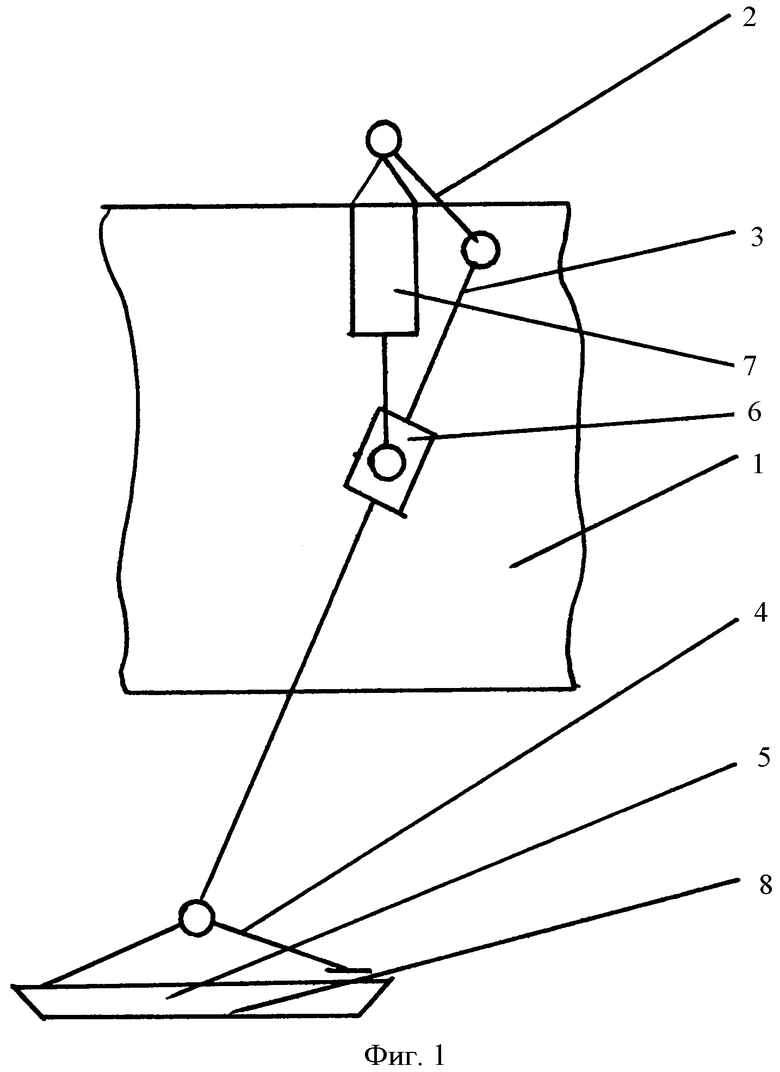
Изобретение поясняется схемами, где на фиг.1 изображена схема шагающего хода; на фиг.2 - самоходная машина с четырьмя механизмами шагающего хода на каждом боковом борту.
На платформе 1 закреплен кривошип 2, который посредством ползуна 3 и через упругий элемент 4 взаимодействует с лыжей 5, перемещаясь по направляющей ползуна 6, которая шарнирно закреплена на платформе 1 с возможностью изменения своего положения относительно этой платформы в плоскости движения ползуна силовым механизмом 7. Лыжа 5 взаимодействует своей опорной поверхностью 8 с несущей поверхностью (дорогой).
Работает описываемый шагающий ход следующим образом. При вращении кривошипа 2, который закреплен на платформе 1, ползун 3 перемещается по направляющей, 6 которая шарнирно закреплена на платформе 1 с возможностью изменения положения относительно платформы 1 в плоскости движения ползуна силовым механизмом 7 и совершает возвратно-поступательное и колебательное движения, сообщая их лыже 5, которая шарнирно закреплена на свободном конце ползуна и периодически взаимодействует своей опрвой поверхностью 8 с дорогой, приподнимая платформу 1 и сообщая ей перемещение относительно дороги. При положении когда кривошит 2 находится выше горизонтали, проходящей через центр его вращения, лыжа 5 переносится вперед по направлению движения платформы 1, которая при наличии нескольких шагающих ходов, закрепленных на этой платформе, опирается в это время на лыжи других ходов, которые в свою очередь сообщают ей движение, а при отсутствии других ходов платформа 1 сама опирается о дорогу. Наличие упругого элемента 4 в кинематической цепи платформа 1 - опорная поверхность 8 лыжи 5 обеспечивает плавное нарастание усилия на подъем и перемещение платформы 1, одновременно компенсируя неровности дороги, и служит увеличению плавности хода платформы 1. Перемещая силовым механизмом 7 шарнирную направляющую 6 ползуна 3 относительно платформы 1, изменяют амплитуду колебаний лыжи 5 относительно дороги, а вместе с этим и длину шага лыжи 5 на оборот кривошипа 2, изменяя таким обрезом линейную скорость и тяговое усилие платформы 1 в направлении движения при постоянной частоте вращения кривошипа 2. При удалении ползуна 6 от оси вращения кривошипа 2 скорость движения платформы 1 уменьшается, а тяговое усилие возрастает и наоборот.
Описанный шагающий ход позволяет бесступенчато регулировать поступательную скорость платформы 1 и ее тяговое усилие, а также позволяет снизить динамические нагрузки на платформу, увеличив таким образом плавность хода с компенсацией неровностей дороги.
Самоходная машина на основе шагающего хода содержит платформу 1 с двигателем и трансмиссией. На каждом боковом борту этой платформы установлено не менее трех шагающих ходов, кривошипы 2 которых кинематически соединены между собой и развернуты по углу поворота относительно друг друга на величину, ревную частному от деления окружности, на количество установленных шагающих ходов. Перемещение направляющих 6 ползунов 3 относительно каждого борта платформы 1 обеспечено независимыми от другого борта силовыми механизмами 7, управление которыми осуществлено рулевым устройством и устройством изменения скорости движения самоходной машины.
Работает описываемая самоходная машина следующим образом. При прямолинейном движения масса машины попеременно опирается на лыжи 5 шагающих ходов, линейная скорость которых одинакова для обоих бортов. Для осуществления поворота направлявшие 6 ползунов 3 борта, в сторону которого происходит поворот, силовым механизмом 7 соответствующего борта перемещаются от осей вращения кривошипов 2, в результате чего длина шага лыж 5 уменьшается при той же частоте вращения кривошипов 2 и машина поворачивается. Для осуществления крутого поворота силовой механизм 7 противоположного борта перемещает направляющие 6 своего борта к осям вращения кривошипов 2 и шаг лыж 5 этого борта увеличивается. Даже при очень крутом повороте (на месте), что присуще гусеничным машинам, не происходит поворота лыж 5 на юз, поскольку они постоянно переступают с места на место даже при нулевой скорости поступательного движения, чем существенно снижаются затраты мощности при повороте против гусеничных машин, и повышается проходимость, поскольку лыжи не зарываются в слабонесущую опорную поверхность, увеличивая сопротивление повороту, и даже при очень малых величинах длины шага обеспечивается передвижение машины. Изменение поступательной скорости машины осуществлено синхронным перемещением направляющих 6 обоих бортов, что ведет к изменению длины шага лыж 5 на оборот кривошипа 2, в результате чего при постоянной частоте вращения кривошипа 2 с увеличением длины шага скорость машины, причем бесступенчато, увеличивается, с уменьшением снижается. При уменьшении длины шага проходимость машины существенно возрастает из-за отсутствия проскальзывания лыжи 5 относительно опорной поверхности (дороги), поскольку при малом шаге во время рабочего хода угол между реакцией дороги, направленной вертикально, и осью ползуна (направление результирующей силы от реакции дороги и силы, обеспечивающей движение машины) весьма мал, отсюда мала и сила, стремящаяся обеспечить проскальзывание лыжи, то есть в данном случае почти всегда сила сцепления лыжи с дорогой больше силы на самоперемещение машины, то есть обеспечивается самопередвижение машины. В случае же использования машины в качестве тягача силы сцепления с дорогой может и не хватить, но в любом случае самопередвижение машины обеспечивается на любых поверхностях (дорогах), где погружение лыж в опорную поверхность меньше двух радиусов кривошипа 2.
Использование описанной самоходной машины позволяет повысить проходимость, снизить затраты мощности на поворот, уплотняющее воздействие на опорную поверхность (особенно актуально для сельского хозяйства), поскольку конструкцией не регламентируется ни длина машины, ни ширина лыж (возможно использовать даже площадь под машиной между ее бортами). Существенно упрощается конструкция трансмиссии путем исключения механизмов поворота ведущего моста и механизмов или устройств изменения скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| СИММЕТРИЧНЫЙ ТРЁХКООРДИНАТНЫЙ ДВИЖИТЕЛЬ С ЛИНЕЙНО-СКОЛЬЗЯЩЕЙ ОПОРОЙ И ВСТРАИВАЕМЫМ УСТРОЙСТВОМ УПРАВЛЕНИЯ, И СИММЕТРИЧНАЯ ШАГАЮЩАЯ ПЛАТФОРМА НА ЕГО ОСНОВЕ | 2016 |
|
RU2643613C2 |
| ДВИЖИТЕЛЬ | 2011 |
|
RU2452629C1 |
| АВТОМОБИЛЬ | 1996 |
|
RU2114754C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| Транспортное средство повышенной проходимости | 2018 |
|
RU2683917C1 |
| ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2010 |
|
RU2446073C2 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2147284C1 |
Изобретения относятся к конструкциям движителей транспортных средств и могут быть использованы в конструкциях машин высокой проходимости, а также в сельскохозяйственном машиностроении. Самоходная машина содержит платформу с двигателем, трансмиссией и устройствами управления. На каждом боковом борту платформы установлены несколько шагающих ходов. Кривошипы шагающих ходов кинематически соединены и развернуты по углу поворота относительно друг друга. Направляющие ползунов шарнирно закреплены на платформе в плоскости движения ползунов. Перемещение направляющих ползунов относительно каждого бокового борта платформы обеспечено независимыми от другого борта силовыми механизмами, управление которыми осуществлено рулевым устройством и устройством изменения скорости движения самоходной машины. Лыжа шарнирно соединена со свободным концом ползуна. Достигается повышение проходимости, обеспечивается бесступенчатая регулировка поступательной скорости платформы и ее тяговое усилие, снижение динамической нагрузки на платформу, увеличивая таким образом плавность хода с компенсацией неровностей дороги. 2 н. и 4 з.п. ф-лы, 2 ил.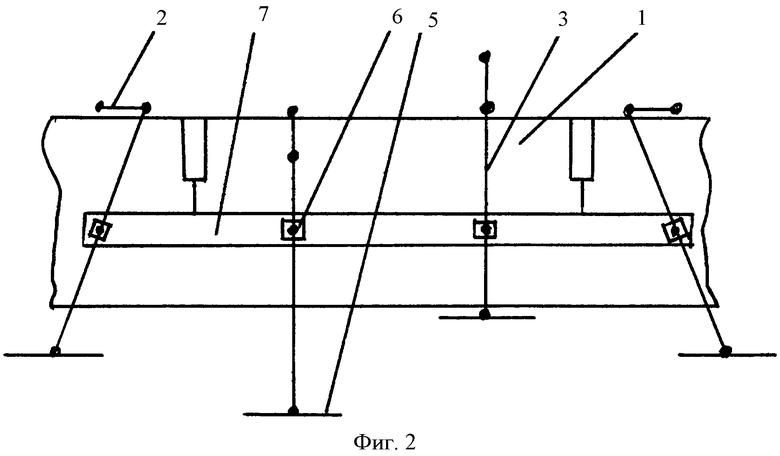
1. Шагающий ход, содержащий платформу, на которой установлен кривошипно-ползунный механизм с кривошипом, ползуном и направлявшей ползуна и опорную лыжу, отличающийся тем, что лыжа шарнирно соединена со свободным концом ползуна, а направляющая ползуна шарнирно закреплена на платформе в плоскости движения ползуна.
2. Шагающий ход по п.1, отличающийся тем, что на платформе дополнительно установлен силовой механизм перемещения по плоскости, на подвижном звене которого шарнирно закреплена направляющая ползуна в плоскости его движения.
3. Шагающий ход по п.1, отличающийся тем, что в кинематической цепи между платформой и опорной поверхностью лыжи установлен упругий элемент.
4. Шагающий ход по п.3, отличающийся тем, что упругий элемент закреплен на лыже и с которым шарнирно соединен ползун.
5. Шагающий ход по п.3, отличающийся тем, что ползун выполнен телескопическим, между подвижными в осевом направлении частями которого установлен упругий элемент.
6. Самоходная машина на основе шагающего хода, содержащая платформу с двигателем, трансмиссией и устройствами управления, отличающаяся тем, что на каждом боковом борту этой платформы установлены несколько шагающих ходов, кривошипы которых кинематически соединены и развернуты по углу поворота относительно друг друга, а перемещение направляющих ползунов относительно каждого бокового борта платформы обеспечено независимыми от другого борта силовыми механизмами, управление которыми осуществлено рулевым устройством и устройством изменения скорости движения самоходной машины.
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2191131C2 |
| Металлический термометр | 1927 |
|
SU8671A1 |
| DE 19530651 A1, 27.02.1997 | |||
| US 4462476 A, 31.07.1984 | |||
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |

