Область техники
Изобретение относится к измерительной технике, в частности к определению местоположения объекта с использованием звуковых волн, в частности местоположения стрелка на местности.
Уровень техники
В настоящее время способы определения траектории движения сверхзвукового артиллерийского снаряда достаточно хорошо разработаны. В меньшей степени разработаны способы пеленгации огневых позиций снайперов. Поэтому большое внимание уделяется разработке способов определения местоположения стрелка на местности и систем поиска снайперов, которые найдут применение в органах охраны правопорядка, в армии и т.д.
Известен способ определения траектории движения сверхзвукового снаряда, описанный в патенте на изобретение "Акустическая система "контр-снайпер" [1], предназначенный для определения движения сверхзвукового снаряда и включающий в себя регистрацию ударных волн и волн сжатия, по крайней мере, двумя чувствительными элементами с известным взаимным местоположением, преобразование собранной информации в информационный сигнал временного ряда, обработку этих сигналов с помощью процессора, при которой учитывают время прихода и амплитуды составляющих скачков уплотнения с каждого чувствительного элемента, классифицируют их как в качестве возможных компонентов взрывной волны, скачка уплотнения или ни того, ни другого и, исходя из баллистического коэффициента сверхзвукового снаряда как функции амплитудного напряжения (Vp) и наклона волны N (V/T), взятых из информации о временном ряде, и относительного времени прихода скачка уплотнения судят о предполагаемой траектории движения сверхзвукового снаряда.
Данный способ несмотря на сложность, трудоемкость и значительные капитальные затраты для создания системы позволяет осуществить регистрацию звуковых волн, возникающих при распространении движущегося со сверхзвуковой скоростью объекта и определить его траекторию.
К недостаткам вышеуказанного способа следует отнести необходимость наличия системы ориентации на местности и отсутствие возможности получения звукового изображения объектов.
Из оптики известно, что качество изображения зависит от длины волны. Согласно критерию Релея изображения двух близких светящихся (некогерентных) точек можно еще считать раздельными, если центр дифракционного пятна, соответствующего одной точке, совпадает с первым дифракционным минимумом во второй точке. В соответствии с критерием Релея наименьшее угловое разрешение δϕ между удаленными точечными источниками, изображения которых еще можно считать раздельными, равно:

В общем случае, в геометрической оптике считается, что обычное двумерное изображение можно получить только в том случае, если диаметр линзы d≫λ. В этом случае дифракционные эффекты пренебрежимо малы, и поэтому можно пренебречь волновой природой света. В акустике, как правило, мы имеем дело с достаточно длинными волнами. Например, звуковая волна с частотой 1 КГц имеет длину волны около 34 см. Если попытаться создать некоторый прибор с разрешением в 1°, который бы позволил получить звуковое изображение, используя звуковые волны с частотой 1 КГц, то несложный расчет показывает, что диаметр акустической линзы или зеркала должен быть около 24 метров. По этой причине обычный способ построения звукового изображения практически нереализуем. Лишь для ультразвука, у которого длина волны меньше 2 см, в настоящее время удалось создать устройства приемлемых размеров, формирующие звуковое изображение. Недостатком ультразвука является то, что в обычной атмосфере ультразвуковые волны затухают на расстояниях порядка нескольких десятков метров. В связи с этим ультразвук получил основное применение лишь в плотных средах, таких как вода, где затухает более медленно. Звуковые волны диапазона 100-10000 Гц могут распространяться в атмосфере на большие расстояния, но из-за большой длины волны их трудно использовать подобно оптическим волнам для получения изображения источника звука. А ведь именно эти звуковые волны в большинстве случаев являются неотъемлемым атрибутом боя. Выстрелы противника, взрывы и т.п. являются источником этих звуков, которые редко сливаются вместе. Даже при стрельбе очередями интервал между выстрелами составляет около 0.1 секунды, что многократно превышает длительность самого выстрела. В частности, низкочастотные звуковые волны уже используются для пеленгации огневых позиций в ряде зарубежных систем, например "Pilar" (Франция) [2]. Но подобные системы, как правило, довольно громоздки и требуют значительное время на разворачивание.
Поэтому представляется заманчивым использовать эти звуки не только для пеленгации огневых позиций снайперов, но и для получения их изображения.
В привязке к этой проблеме, если под регистрацией ударных волн и волн сжатия понимать ударные волны от пролетевшей сверхзвуковой пули и дульной волны от расширяющихся газов со среза ствола чувствительными элементами, то тогда способ определения траектории движения сверхзвукового снаряда, описанный в патенте на изобретение "Акустическая система "контр-снайпер" [1]), как наиболее близкий по технической сущности, можно выбрать в качестве прототипа.
К недостаткам вышеуказанного способа-прототипа следует отнести его неприемлемость для определения местоположения снайпера на местности в движении и отсутствие возможности получения звукового изображения движущегося объекта.
Раскрытие изобретения
Технический результат, достигаемый изобретением, заключается в обеспечении безопасности, возможности указания направления нахождения противника, дальности до него путем создания способа, позволяющего не только определить направление источника звука, но и обнаружить ("увидеть") его.
Указанный технический результат в заявляемом изобретении достигается тем, что в способе определения местоположения стрелка на местности, включающем запись звуковых сигналов при регистрации ударных волн от пролетевшей сверхзвуковой пули и дульной волны от расширяющихся газов со среза ствола чувствительными элементами, обработку этих сигналов с помощью процессора, по результатам которой судят о местоположении источника звука, новым является то, что предварительно чувствительные элементы закрепляют неподвижно относительно оптической оси устройства видеозаписи, синхронно с записью звуковых сигналов при регистрации ударных волн не менее чем 3-мя чувствительными элементами, осуществляют запись видеоизображения вероятного местоположения источника звука с помощью, по крайней мере, одного устройства видеозаписи, установленного с возможностью изменения направления съемки и положения в пространстве, а при последующей обработке сигналов совмещают по времени момент прихода дульной волны и ближайший по времени к этому моменту кадр из записанного видеоряда, на который и наносят отметку о местоположении стрелка. При этом запись видеоизображения осуществляют в оптическом или инфракрасном или ином диапазоне.
Синхронная запись звуковых сигналов не менее чем 3-мя чувствительными элементами и видеоизображения вероятного местоположения источника звука с помощью одного или нескольких устройств видеозаписи, установленных с возможностью изменения направления съемки и положения в пространстве, позволяет с высокой точностью определить местоположение стрелка на местности.
Предварительное неподвижное закрепление чувствительных элементов относительно оптической оси устройства видеозаписи позволяет упростить отображение местоположения стрелка на местности.
Обработка сигналов, при которой совмещают по времени момент прихода дульной волны и ближайший по времени к этому моменту кадр из записанного видеоряда, на который и наносят отметку о местоположении стрелка, способствует высокой точности определения как местоположения стрелка на местности, так и дальности до него.
Запись видеоизображения, осуществляемая в оптическом, или инфракрасном, или ином диапазоне, позволяет определить место расположения источника звука на местности без предварительной топографической привязки.
При реализации данного способа можно не только определить направление на противника, дальность до него, но и "увидеть" источники звука непосредственно на поле боя, в том числе "увидеть" одиночный источник звука, например транспортное средство, движущееся в лесу, по звуку его двигателя.
Кроме того, дополнительным преимуществом заявляемого способа является возможность нахождения направления только на один, самый громкий источник звука. При такой постановке задачи исчезает необходимость в разделении двух некогерентных источников звука в пространстве, так как эти источники разделяются во времени.
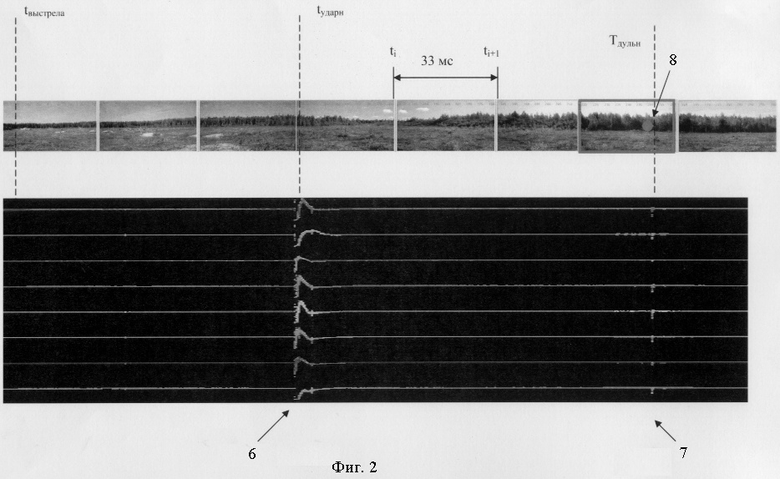
Дополнительно, если запись изображения ведется как в оптическом, так и в инфракрасном диапазоне, причем видеоданные пишутся в кольцевой видеобуфер (длительностью не менее 2 секунд), то появляется возможность увидеть инфракрасную вспышку пороховых газов на срезе ствола. Для этого нужно вытащить из видеобуфера кадр, соответствующий моменту самого выстрела (tвыстрела на фигуре 2). Для вычисления tвыстрела используются записанные акустические сигналы с микрофонов после обнаружения ударной волны. Далее инфракрасная вспышка накладывается из видеобуфера инфракрасного диапазона на соответствующий кадр видеобуфера обычного оптического диапазона.
Краткое описание чертежей
На фигурах 1-6 отображена реализация предлагаемого способа определения местоположения стрелка на местности.
На фигуре 1 представлена общая схема устройства, где 1 - чувствительные элементы (микрофоны), 2 - устройство видеозаписи (видеокамера), соединенное с монитором 3 и через аналого-цифровой преобразователь 4 с процессором 5:
На фигуре 2 показана схема обработки сигналов, где 6 - ударная волна - признак начала записи звука, 7 - дульная волна, 8 - метка положения стрелка.
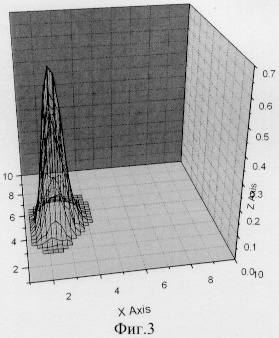
На фигуре 3 показан вид корреляционного пика, который представляет собой поверхность двумерной функции корреляций между каналами микрофонов при стрельбе из винтовки СВД (снайперская винтовка Драгунова) с расстояния 330 метров.
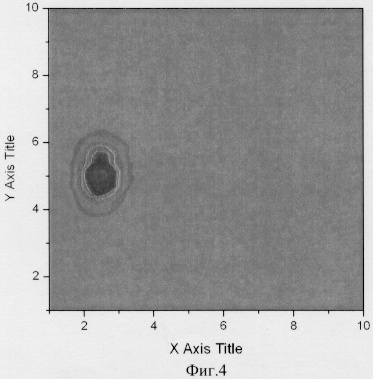
На фигуре 4 изображено место этого же выстрела (винтовка СВД с расстояния 330 метров) в виде цветного пятна с яркостью, меняющейся в зависимости от величины амплитуды.
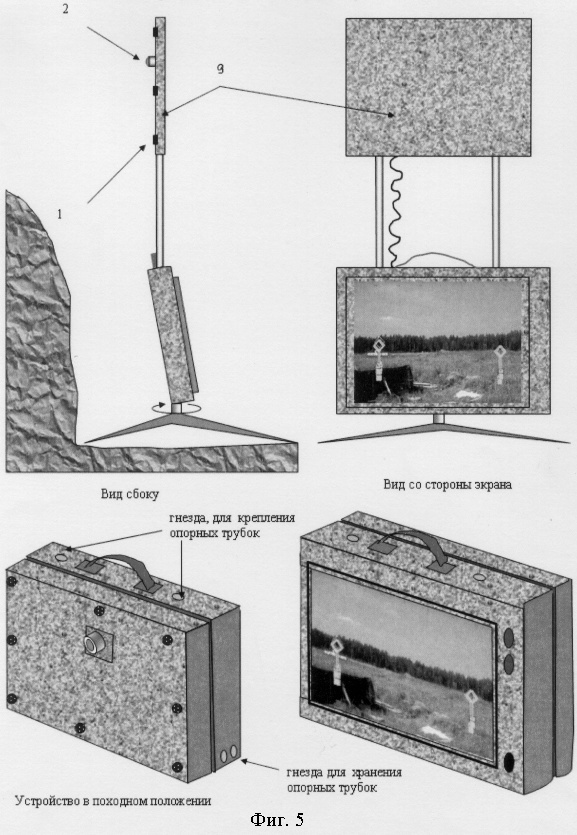
На фигуре 5 показан внешний вид экспериментального устройства, где 1 - микрофоны, 2 - видеокамера или цифровой фотоаппарат, 9 - звукопоглощающий экран.
На фигуре 6 проиллюстрированы вычисленные огневые позиции стрелков, наложенные на видеоизображение.
Осуществление изобретения
Способ определения местоположения стрелка на местности реализуется следующим образом. Чувствительные элементы предварительно закрепляют неподвижно относительно оптической оси каждого устройства видеозаписи. Затем при обнаружении ударных волн от пролетевшей сверхзвуковой пули и дульной волны от расширяющихся газов со среза ствола записывают звуковые сигналы не менее чем 3-мя чувствительными элементами и осуществляют синхронную запись видеоизображения области вероятного местоположения источника звука с помощью одного или нескольких устройств видеозаписи, установленных с возможностью изменения направления съемки и положения в пространстве. При последующей обработке сигналов совмещают по времени момент прихода дульной волны и ближайший по времени к этому моменту кадр из записанного видеоряда, на который и наносят отметку о местоположении стрелка. Причем запись видеоизображения осуществляют в оптическом, или инфракрасном, или ином диапазоне.
Заявляемый способ реализуется на устройстве, представленном на фиг.1 и выполненном в виде 4 чувствительных элементов (микрофонов) 1, неподвижно установленных относительно оптической оси каждого устройства видеозаписи 2, размещенного с возможностью изменения направления съемки и положения в пространстве и соединенного с монитором 3 и через аналого-цифровой преобразователь 4 с процессором 5.
Заявляемый способ определения местоположения стрелка на местности осуществляют следующим образом. Чувствительные элементы 1 предварительно закрепляют неподвижно относительно оптической оси устройства видеозаписи 2, каждое из которых устанавливают с возможностью изменения направления съемки и положения в пространстве. При обнаружении ударной волны 6 синхронно с записью звуковых сигналов с помощью амплитудно-цифрового преобразователя 4 и процессора 5, регистрирующих ударные волны от пролетевшей сверхзвуковой пули и дульной волны 7 от расширяющихся газов со среза ствола не менее чем 3-мя чувствительными элементами 1, осуществляют запись видеоизображения вероятного местоположения источника звука устройством видеозаписи 2. При последующей обработке сигналов совмещают по времени момент прихода дульной волны и ближайший по времени к этому моменту кадр из записанного видеоряда, на который и наносят отметку о местоположении стрелка 8.
На предприятии изготовлен возможный вариант экспериментального устройства, показанный на фиг.5. В предположении, что скорость звука известна и с точки зрения повышения точности, более эффективно расположить все чувствительные элементы (микрофоны) 1 в одной плоскости, перпендикулярной оптической оси устройства видеозаписи (видеокамеры или цифрового фотоаппарата) 2. Для того чтобы уменьшить воздействие на микрофоны отраженных волн сбоку и сзади, их предлагается расположить перед звукопоглощающим экраном (например, из стекловаты, поролона или другого поглощающего материала) 3. При плоском расположении микрофонов 1 обеспечивается наиболее высокая точность пеленгации. Ориентировочный размер микрофонной антенны примерно 20-30 см. При таких размерах изменение направления на источник звука на 1 градус соответствует изменению прихода фронта волны на 0.6 см, что хорошо согласуется с частотой дискретизации. При частоте дискретизации 41 КГц на канал волна успевает между тактами пройти 0.7 см. Таким образом, можно предположить, что устройство будет способно обеспечить обнаружение источника звука с точностью около 1 градуса. В связи с этим целесообразно видеоизображение также покрыть сеткой с шагом в 1 градус.
В момент обнаружения дульной волны производят захват видеоизображения и на это неподвижное изображение накладывают метку цели с указанием дальности. Поэтому в системе может быть использована как цифровая видеокамера, так и инфракрасная видеокамера ночного видения. Кроме того, для того чтобы рассмотреть указанную устройством позицию стрелка с большим увеличением, можно ввести в устройство вторую длиннофокусную видеокамеру. При этом можно предусмотреть программу, реагирующую на движение.
Для того чтобы выяснить практическую реализуемость предлагаемого способа, на полигоне был проведен следующий эксперимент. Восемь микрофонов были расположены на плоской подставке диаметром 35 см аналогично тому, как это изображено на фиг.5. Для имитации видеокамеры использовался цифровой фотоаппарат, оптическая ось которого совпадала с перпендикуляром к плоскости микрофонов.
На фиг.3 показана поверхность двумерной функции корреляций между каналами микрофонов 1 при стрельбе из винтовки СВД с расстояния 330 метров. Направление прихода звуковых волн вычисляется методом определения максимума суммы межканальных корреляций по 4-16 каналам.
На фиг.4 этот же выстрел изображен в виде цветного пятна с яркостью, меняющейся в зависимости от величины амплитуды. При этом яркость "накладываемого звукового изображения" зависит от величины корреляций (потока энергии в данном направлении). Цвет в данной точке зависит от частоты звука.
Точность определения местоположения стрелка на местности определялась на устройстве (фиг.5) с помощью серии однотипных выстрелов. Разброс вычисленной точки положения стрелка от выстрела к выстрелу соответствует возможной ошибке. Как видно из фиг.6, разброс для 14 выстрелов с двух различных огневых позиций составил не более 0,5 градуса как по вертикали, так и по горизонтали. Этот результат продемонстрировал потенциально высокую точность обнаружения стрелка на местности.
С учетом вышеизложенного можно сказать, что промышленная применимость способа определения местоположения стрелка на местности не вызывает сомнений. Он может быть использован для поиска снайперов, для решения задач обеспечения безопасности в органах охраны правопорядка, в армии и т.д. При реализации способа можно увидеть местоположение различных источников звука на поле боя. Можно в качестве устройства видеозаписи, кроме видеокамеры, использовать инфракрасную аппаратуру или прибор ночного видения. Устройство для осуществления способа может быть достаточно компактным. Оно не требует предварительной привязки на местности, поэтому может быть приведено в рабочее состояние в короткое время. В принципе система может быть создана без монитора в виде бинокля (в одной из фокальных плоскостей может быть расположена жидкокристаллическая решетка).
Литература
1. US №6178141, МКИ: G 01 S 5/80, опубл. 23.01.2001 г.
2. www.metravib.fr.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРЯМОГО ПУЛЕВОГО ВЫСТРЕЛА | 2020 |
|
RU2757994C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ МЕСТА ВЫСТРЕЛА ИЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 2007 |
|
RU2366888C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРЯМОГО ПУЛЕВОГО ВЫСТРЕЛА | 2017 |
|
RU2668943C1 |
| СПОСОБ КАЛИБРОВКИ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ДАТЧИКОВ В СИСТЕМЕ ОБНАРУЖЕНИЯ ВЫСТРЕЛА | 2005 |
|
RU2347234C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ НЕСКОЛЬКИХ СНАЙПЕРОВ | 2011 |
|
RU2498191C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2408025C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ВЫСТРЕЛА ИЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ (ВАРИАНТЫ) | 2008 |
|
RU2406964C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЛЮБИТЕЛЬСКОГО МУЗЫКАЛЬНОГО ВИДЕОФИЛЬМА И ВИДЕОКАМЕРА ДЛЯ ЕГО СЪЕМКИ | 1999 |
|
RU2145738C1 |
| БОРТОВОЕ ОБОРУДОВАНИЕ ДЛЯ ОБНАРУЖЕНИЯ СТРЕЛЬБЫ И СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ | 2016 |
|
RU2717753C2 |

Изобретение относится к измерительной технике, в частности к определению местоположения объекта с использованием звуковых волн, в частности местоположения стрелка на местности. Способ определения местоположения стрелка на местности заключается в том, что включают запись звуковых сигналов при регистрации ударных волн от пролетавшей сверхзвуковой пули и дульной волны от расширяющихся газов со среза ствола чувствительными элементами, обработку этих сигналов с помощью процессора, по результатам которой судят о местоположении источника звука. Новым в способе является то, что предварительно чувствительные элементы закрепляют неподвижно относительно оптической оси устройства видеозаписи, синхронно с записью звуковых сигналов не менее чем 3-мя чувствительными элементами осуществляют запись видеоизображения вероятного местоположения источника звука с помощью, по крайней мере, одного устройства видеозаписи, установленного с возможностью изменения направления съемки и положения в пространстве, при последующей обработке сигналов совмещают по времени момент прихода дульной волны и ближайший по времени к этому моменту кадр из записанного видеозаряда, на который и наносят отметку о местоположении стрелка. При этом запись видеоизображения осуществляют в оптическом или инфракрасном или ином диапазоне. Технический результат, достигаемый изобретением, заключается в обеспечении безопасности, возможности указания направления нахождения противника, дальности до него путем создания способа, позволяющего не только определить направление источника звука, но и обнаружить ("увидеть") его. 1 з.п. ф-лы, 6 ил.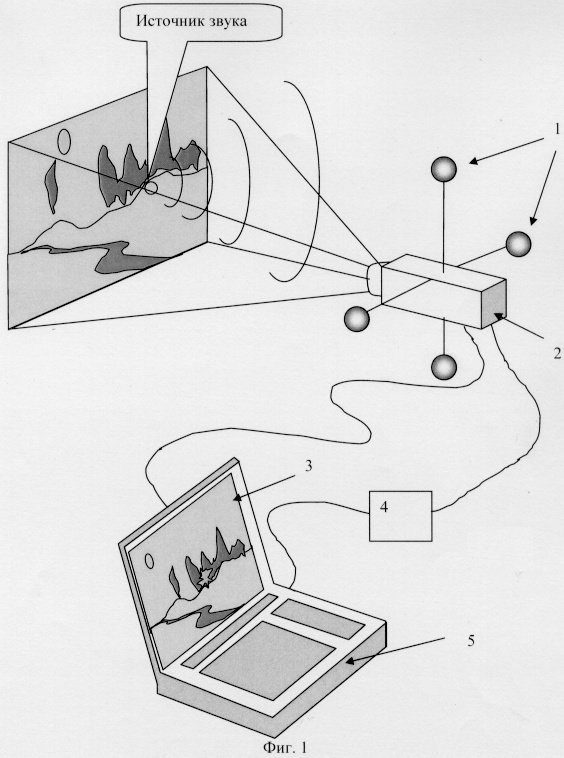
| US 6178141 B1, 23.01.2001 | |||
| RU 95111404 A1, 20.05.1997 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2001 |
|
RU2231084C2 |
| US 5241518 A, 31.08.1993 | |||
| US 4514621 A, 30.04.1995. | |||

