Настоящее изобретение относится к техническим решениям для правоохранительных органов и служб безопасности, и более конкретно к способам и системам для оценки координат точки выстрела или пуска (далее "выстрел") сверхзвукового объекта на основе измерения параметров только ударной волны.
Известны системы и способы, с помощью которых можно определить обобщенное направление и траекторию пущенного сверхзвукового объекта, например пули или артиллерийского снаряда (далее "снаряд"), измеряя параметры ударной волны, излучаемой таким пущенным объектом. В одной из таких систем, описанной в патенте США №5930202, используется распределенный набор акустических датчиков, которые обеспечивают измерение времен прибытия, амплитуд и частотных характеристик ударной волны, излучаемой пущенным объектом, и дульной волны огнестрельного оружия. Информация времени прихода для ударной волны может быть использована для определения следующих параметров траектории пущенного объекта: азимута, угла возвышения и пересечения с произвольной плоскостью в системе координат. Используя дополнительную информацию о параметрах дульной волны, можно определить точное положение точки выстрела и ее точный пеленг. Если же ударная волна замаскирована, подавлена, заглушена или каким-либо образом искажена, то используя только информацию ударной волны, можно оценить по меньшей мере траекторию снаряда.
В известных системах обычно используется антенна с акустическими датчиками, которые могут быть размещены сравнительно близко друг от друга (например, на расстоянии 1 м) или же удалены друг от друга (например, могут быть смонтированы на транспортных средствах или могут носиться солдатами на поле боя), причем каждый датчик, имеющий ненаправленную диаграмму направленности, измеряет давление ударной волны в месте его нахождения. Одна типичная антенна может содержать, например, семь ненаправленных микрофонов, шесть из которых распределены по поверхности сферы, имеющей диаметр около 1 м, а седьмой микрофон размещен в центре сферы. В схемах, использующих менее семи датчиков, могут формироваться неприемлемые лепестки в пространственной диаграмме направленности конфигурации датчиков.
Положения датчиков могут изменяться в течение всего срока службы системы и/или характеристики датчиков в силу действия различного рода причин могут ухудшаться со временем. Кроме того, некоторые датчики могут вообще выйти из строя.
Поэтому было бы желательно создать систему и способ, которые позволяли бы компенсировать изменения положений датчиков и их характеристик путем их калибровки, которая осуществлялась бы автоматически или с участием оператора.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью изобретения является создание способа калибровки положений датчика, которая осуществляется на основании измерений ударной и дульной волн и их обработки для серии выстрелов (пусков), сделанных в известном направлении из точки, координаты которой известны, а также создание способа динамической адаптации алгоритмов оценки координат точки выстрела только по информации ударной волны для компенсации ухудшения характеристик датчиков и/или их выхода из строя.
В соответствии с одним из вариантов осуществления изобретения способ калибровки относительных положений датчиков в системе оценки координат точки выстрела содержит следующие стадии: определение приблизительной информации об относительном положении датчиков; осуществление по меньшей мере двух выстрелов в известных направлениях из разных точек, координаты которых известны; определение разности времен прихода дульной и ударной волн для каждого из датчиков и для каждого выстрела и определение относительных положений датчиков, которые дают минимальную невязку разницы времен по меньшей мере для двух выстрелов.
Варианты осуществления изобретения содержат определение относительных положений датчиков методом наименьших квадратов. Поиск методом наименьших квадратов может быть начат от предыдущих известных положений датчиков или же от приближенно измеренных положений датчиков. Любой из датчиков может быть выбран в качестве опорного датчика, и относительные времена прихода дульной и ударной волн могут быть вычислены для каждого датчика относительно опорного датчика.
В соответствии с другим вариантом осуществления изобретения способ компенсации ухудшения характеристик датчиков в системе определения координат точки выстрела, в которой используются несколько датчиков, содержит следующие стадии: определение времен прихода к датчикам ударных волн от выполненных выстрелов; выполнение регрессии методом наименьших квадратов для времен прихода к датчикам ударной волны для определения невязки измерения времени; контроль вклада каждого из датчиков в величину невязки измерения времени для нескольких выстрелов и назначение каждому датчику весового коэффициента, который обратно пропорционален вкладу датчика в невязку измерения времени.
Варианты осуществления изобретения могут содержать нормализацию вклада в наблюдаемую максимальную разницу времен прихода. Кроме того, может быть вычислено взвешенное время прихода ударной волны для увеличения вклада датчиков, которые имеют большую надежность. В этом случае положение точки выстрела и траектория снаряда могут быть определены из невязки времени, вычисленной по взвешенному времени прихода ударной волны. Любой весовой коэффициент, который был изменен в связи с ненадлежащей работой датчика, может быть отрегулирован после ремонта датчика.
Другие особенности и преимущества настоящего изобретения станут ясными из нижеприведенного описания предпочтительных вариантов осуществления изобретения и из его формулы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые иллюстративные варианты осуществления изобретения представлены на прилагаемых чертежах, на которых одинаковые ссылочные номера относятся к одинаковым элементам. Описанные варианты никоим образом не ограничивают объем изобретения и должны рассматриваться лишь только как его иллюстрации.
Фигура 1 - схематический вид типичной конфигурации датчиков, содержащей семь ненаправленных акустических датчиков.
Фигура 2 - схематический вид модели времен прихода ударной волны.
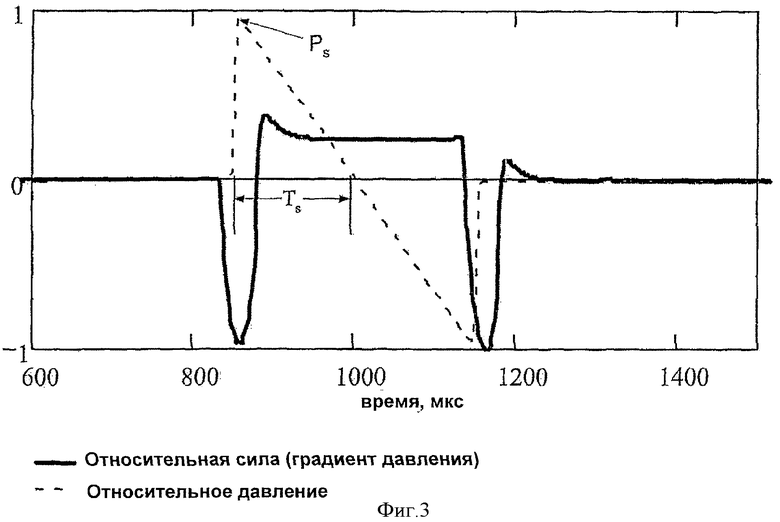
Фигура 3 - график изменения давления ударной волны, излучаемой снарядом.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью изобретения является создание систем и способов, обеспечивающих компенсацию изменений положения и характеристик акустических датчиков, которые измеряют параметры ударной волны, излучаемой сверхзвуковым объектом, для определения его траектории. В частности, рассмотренные в описании системы и способы обеспечивают выполнение калибровки в автоматическом режиме или с участием оператора в том случае, когда положение одного или нескольких датчиков изменяется или происходят сбои в работе одного или нескольких датчиков или полный отказ.
В общем случае в акустической системе определения координат точки выстрела в соответствии с изобретением используется распределенная конфигурация акустических датчиков, которые обнаруживают передний фронт ударной волны снаряда и дульной волны, распространяющейся от дульного среза устройства, используемого для выстрела (пуска), например, винтовки. Времена прихода ударной волны и дульной волны измеряются датчиками для каждого типа волны. Информация о времени прихода ударной и дульной волны может использоваться для определения траектории пущенного объекта, пеленга на точку выстрела и расстояния от датчика до точки выстрела.
Хотя в принципе ударная волна содержит информацию о расстоянии, которое она прошла, на практике картина ударной волны обычно искажена отражениями от наземных объектов, рассеянием в направлении ее распространения и другими эффектами многолучевого распространения, так что использование только ударной волны для надежного получения информации о расстоянии или о длительности ее распространения довольно затруднительно. Для оценки траектории в системе используется прежде всего измерение времени прихода сигнала, осуществляемое по его переднему фронту, поскольку передний фронт не искажен многолучевым распространением.
Те же самые датчики, которые используются для измерения параметров ударной волны, могут использоваться для определения местоположения источника дульной волны, если сигнал дульной волны, принятый датчиками, имеет достаточные отличия от сигнала ударной волны и если можно предполагать, что сигнал дульной волны распространяется по линии прямой видимости между срезом дула и датчиками. Способность определения местоположения источника дульной волны используется вместе с информацией, относящейся к ударной волне, для очень точного определения координат точки выстрела. Однако если для определения координат точки выстрела (пуска) использовать только информацию дульной волны, то такой способ не будет надежным, поскольку дульную волну можно заглушить. Кроме того, дульная волна может ослабляться из-за интерференции, создаваемой искусственными сооружениями (например зданиями) или естественными структурами (например холмами). Поэтому в практической реализации системы информация дульной волны используется в качестве дополнительной к информации ударной волны. Однако сигнал контролируемой дульной волны может использоваться для калибровки системы.
Акустическая система определения координат точки выстрела в соответствии с изобретением в общем виде представлена на фигуре 1. Изображенный типичный вариант конфигурации 10 акустических датчиков содержит семь датчиков 12, 13, 14, 15, 16, 17, 18, в качестве которых могут использоваться ненаправленные микрофоны. Датчики 13-18 могут быть равномерно распределены по поверхности сферы, имеющей диаметр, равный например 1 м, а датчик 12 размещается в центре сферы, хотя возможны также и другие конфигурации размещения датчиков. Координаты датчиков относительно центра сферы (Сх0, Су0, Cz0) указаны как (Cxj, Cyj, Czj). Типичная конфигурация, содержащая семь датчиков, может обеспечить практически однородную пространственную чувствительность, не зависящую от угла падения ударной волны относительно осей системы координат конфигурации датчиков, если характеристики датчиков, то есть передаточные функции (выходное напряжение/звуковое давление) одинаковы или по меньшей мере известны и постоянны для всех датчиков. Было найдено, что в принципе для определения угла падения в пространстве достаточно пяти датчиков, однако пятиэлементная конфигурация датчиков не обеспечивает достаточной равномерности диаграммы направленности, то есть на некоторых направлениях чувствительность может быть высокой, а на других направлениях может приниматься только слабый сигнал.
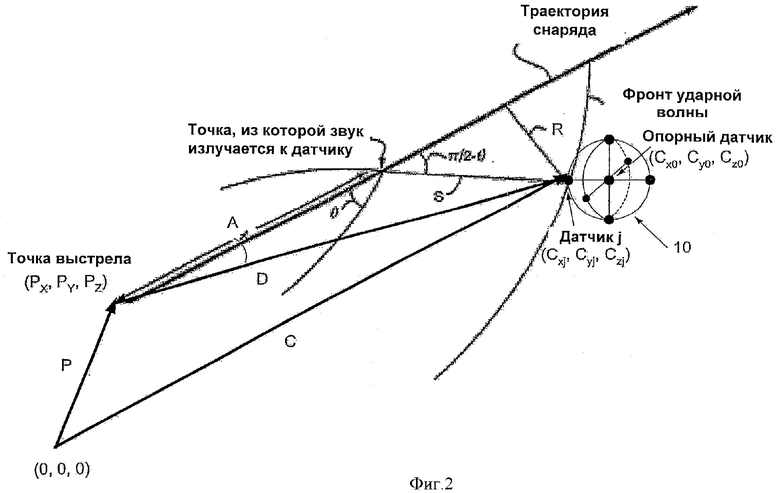
На фигуре 2 представлен вид модели времен прихода ударной волны, описанной более подробно в патенте США №6178141, которая используется для оценки траектории снаряда и направления на точку выстрела (пуска) относительно точки нахождения датчика. Модель времен прихода построена на основе точной баллистической модели, учитывающей некоторые физические характеристики, относящиеся к полету снаряда, в том числе: плотность воздуха (зависит от температуры); декартовы координаты (Рх, Ру, Pz) точки выстрела (пуска); углы азимута и возвышения дульного среза оружия; скорость снаряда на выходе из ствола (число Маха) и скорость звука (зависит от температуры и плотности воздуха). Используя эту баллистическую модель, можно точно рассчитать для любой заданной точки в пространстве точное время, когда ударная волна (и дульная волна, если она используется) достигнет этой точки.
Измерения давления ударной волны и времени ее прихода пятью или более вышеупомянутыми датчиками достаточны для однозначного определения координат точки выстрела (пуска), траектории пущенного снаряда и его калибра. Как показано на схеме фигуры 2, точка Р выстрела имеет координаты (Рх, Ру, Pz) относительно центра (0, 0, 0) системы координат, датчики размещаются в точках С с координатами (Сxj, Cyj, Czj), и траектория снаряда показана исходящей из точки выстрела в направлении  где индекс j относится к датчику j. Длина вектора между точкой выстрела и датчиком j равна
где индекс j относится к датчику j. Длина вектора между точкой выстрела и датчиком j равна  ближайшая точка траектории снаряда от датчика j находится на расстоянии
ближайшая точка траектории снаряда от датчика j находится на расстоянии  и расстояние, которое проходит излучаемая ударная волна от точки траектории до датчика j, равно
и расстояние, которое проходит излучаемая ударная волна от точки траектории до датчика j, равно  Угол волнового конуса снаряда (пули) равен θ=sin-1(1/М), М=V/c0. М - число Маха снаряда, V - его сверхзвуковая скорость и с0 - скорость звука (зависит от давления и температуры). Угол "расхождения" между траекторией снаряда и направлением на j-ый датчик равен γj. Траектория характеризуется ее азимутальным углом α, измеренным против часовой стрелки от оси Х в плоскости X-Y, и углом возвышения ϕ, измеренным вверх от плоскости X-Y. Уравнения, определяющие время tj прихода ударной волны и единичный вектор на j-ом датчике, содержат указанные геометрические параметры.
Угол волнового конуса снаряда (пули) равен θ=sin-1(1/М), М=V/c0. М - число Маха снаряда, V - его сверхзвуковая скорость и с0 - скорость звука (зависит от давления и температуры). Угол "расхождения" между траекторией снаряда и направлением на j-ый датчик равен γj. Траектория характеризуется ее азимутальным углом α, измеренным против часовой стрелки от оси Х в плоскости X-Y, и углом возвышения ϕ, измеренным вверх от плоскости X-Y. Уравнения, определяющие время tj прихода ударной волны и единичный вектор на j-ом датчике, содержат указанные геометрические параметры.
Время прихода равно времени  которое необходимо снаряду для того, чтобы пройти расстояние
которое необходимо снаряду для того, чтобы пройти расстояние  до точки, из которой звук излучается в направлении j-ого датчика, плюс время, в течение которого ударная волна проходит расстояние
до точки, из которой звук излучается в направлении j-ого датчика, плюс время, в течение которого ударная волна проходит расстояние  от точки
от точки  излучения до датчика j,
излучения до датчика j,

где t0 - это время начала отсчета (момент выстрела). Ближайшая точка траектории снаряда от j-го датчика находится на расстоянии
Ближайшая точка траектории (или  ) может быть определена независимо по измеренному наклону ударной волны (см. фигуру 3) в соответствии со следующим уравнением:
) может быть определена независимо по измеренному наклону ударной волны (см. фигуру 3) в соответствии со следующим уравнением:
Mj - число Маха снаряда в точке, из которой звук излучается к j-ому датчику вдоль траектории  снаряда, а ρ, с0 и β - атмосферное давление, скорость звука и параметр нелинейности (β=1,3). Скорость звука с0 изменяется в зависимости от температуры следующим образом: с0=20,05 √ТКельвин (м/с). Наклон ударной волны определяется пиковым значением Ps ее давления, деленным на половину интервала Ts (см. фигуру 3).
снаряда, а ρ, с0 и β - атмосферное давление, скорость звука и параметр нелинейности (β=1,3). Скорость звука с0 изменяется в зависимости от температуры следующим образом: с0=20,05 √ТКельвин (м/с). Наклон ударной волны определяется пиковым значением Ps ее давления, деленным на половину интервала Ts (см. фигуру 3).
Для целей измерения можно предположить, что скорость V снаряда остается постоянной на его траектории, если датчики расположены близко друг от друга, так что происходит лишь незначительное уменьшение скорости между моментами времени, в которые происходит излучение волны, принимаемой разными датчиками. Однако в более общем случае может быть использована математическая баллистическая модель, которая позволяет оценить время прихода ударной волны в любой точке пространства как функции полного набора параметров. Она выводится на основании физических законов, и ее точность составляет около 10 частей на миллион (ppm). Математическая модель подробно описывается в патенте США №6178141. Для сравнения, традиционные баллистические модели, получаемые эмпирически, имеют точность около 1 м для расстояний порядка 1 км, то есть 1000 ppm.
Баллистическая модель включает коэффициент Сb сопротивления снаряда, который зависит от его калибра. Оценку калибра можно получить либо из пикового значения (Ps)j давления или из половины интервала измерения (Ts)j j-ым датчиком с использованием нижеприведенного уравнения, в котором учитываются определенные параметры снаряды, такие как площадь поперечного сечения S, его длина L и константа К, которая определяется формой снаряда
После того определен калибр, можно найти коэффициент Сb лобового сопротивления снаряда. Этот параметр важен для баллистической модели оценки траектории снаряда. В контексте настоящего рассмотрения предполагается, что коэффициент лобового сопротивления пропорционален квадратному корню из числа Маха. Более точная модель описывается в патенте США №5930202, содержание которого полностью вводится ссылкой в настоящую заявку. Расстояние  и время
и время  полета до точки, из которой излучается звук, принимаемый j-ым датчиком, определяются по начальной скорости V0 на дульном срезе, местной скорости V=Mc0 и коэффициенту Сb лобового сопротивления.
полета до точки, из которой излучается звук, принимаемый j-ым датчиком, определяются по начальной скорости V0 на дульном срезе, местной скорости V=Mc0 и коэффициенту Сb лобового сопротивления.
Схема размещения датчиков, изображенная на фигуре 1, используется для измерения разностей времен прихода для различных датчиков 12-18. Таким образом, определение координат точки выстрела и траектории снаряда в первую очередь основывается на точном знании относительного положения датчиков 12-18 в трехмерном пространстве. Кроме того, измерения времени прихода ударной волны должны осуществляться без смещений датчиков, и при этом необходимо осуществлять компенсацию изменений со временем чувствительности датчиков.
Относительные положения датчиков в пространстве могут изменяться со временем из-за механических смещений, например изгибов конструкции или других деформаций, в результате чего ухудшается точность определения координат точки выстрела по разностям времен прихода ударной волны. Поэтому важно обеспечить возможность точной калибровки положений датчиков на месте работы либо в соответствии с установленной периодичностью, либо иным способом, например, когда имеются сомнения в точности измерений.
Как описано в патенте США №5930202, точные координаты точки выстрела (местонахождение снайпера) на траектории полета снаряда (пули) могут быть вычислены в том случае, если в дополнение к ударной волне может быть надежно измерена дульная волна, при условии, что известны точные координаты датчиков. Однако необходимо отметить, что в этом случае необходимо знать только относительные положения датчиков, а не их абсолютные положения в пространстве. Существенным моментом настоящего изобретения является то, что относительные координаты датчиков в пространстве определяются на основании известной точки выстрела и измеренной ударной волны.
Типичная конфигурация 10 размещения датчиков, представленная на фигуре 1, содержит семь датчиков, причем один из них, например датчик 12, находящийся в центре, может быть произвольно выбран в качестве опорного датчика, имеющего координаты (Сх0, Су0, Cz0), так что остальные (n-1)=6 датчиков имеют относительные координаты (Cxj, Cyj, Czj), где j=1, ..., 6. Поэтому общее число относительных координат конфигурации 10 датчиков в трехмерном пространстве будет равно (n-1)*3=18. Времена tmuzzle прихода дульной волны и времена tshock прихода ударной волны измеряются каждым из указанных шести датчиков по меньшей мере для трех выстрелов из различных известных точек выстрела с известными траекториями. Точкой в конфигурации датчиков, относительно которой должны быть измерены углы азимута и возвышения, может быть, например, вышеуказанный опорный датчик, указанный в качестве центра (Сх0, Су0, Cz0) декартовой системы координат. Для трех выстрелов получается в сумме 42 измерения различных времен прихода (21 для дульной волны и 21 для ударной волны) по отношению к начальному моменту выстрела t0. Соответственно, для конфигурации датчиков, в которой используется n датчиков и осуществляется m выстрелов, имеется (n-1)·3 неизвестных (координаты (Cxj, Сyj, Czj) j датчиков относительно точки (Сх0, Су0, Cz0)) и 2·m·(n-1) измеренных параметров и имеется достаточно дополнительной информации для выполнения приближения методом наименьших квадратов, который может обеспечить сглаживание отклонений выстрела (координаты точки выстрела и траектория снаряда) от расчетных значений параметров. Для решения системы уравнений необходимо по меньшей мере два выстрела, однако рекомендуется выполнять три выстрела для обеспечения лучшего сглаживания шумов измерений. Выстрелы должны выполняться в условиях отсутствия акустических помех, так чтобы можно было выполнить точные измерения ударной и дульной волн.
Иначе говоря, добавляя уравнение дульной волны  к вышеприведенным уравнениям (1) или (5), могут быть определены (n-1) относительных положений датчиков (Cxj, Cyj, Czj) (j=1, ..., 6), которые наилучшим образом соответствуют временам прихода ударной и дульной волн, Δtmuzzle и Δtshock, соответственно, например, с помощью градиентного поиска с использованием метода наименьших квадратов или используя генетический алгоритм. Градиентный поиск запускается с последних измеренных или других предположительно точных положений датчиков.
к вышеприведенным уравнениям (1) или (5), могут быть определены (n-1) относительных положений датчиков (Cxj, Cyj, Czj) (j=1, ..., 6), которые наилучшим образом соответствуют временам прихода ударной и дульной волн, Δtmuzzle и Δtshock, соответственно, например, с помощью градиентного поиска с использованием метода наименьших квадратов или используя генетический алгоритм. Градиентный поиск запускается с последних измеренных или других предположительно точных положений датчиков.
С помощью градиентного поиска с использованием метода наименьших квадратов или генетического алгоритма пробуют минимизировать среднеквадратические значения невязок для положений всех датчиков (Cxj, Cyj, Czj) относительно опорного датчика.
Среднеквадратическое значение невязки определяется как

Было найдено, что положения датчика относительно опорного датчика могут быть быстро и надежно определены с помощью эволюционного генетического алгоритма. Генетический алгоритм воспроизводит естественные эволюционные процессы и применяет их для выполнения исследований и оптимизации. Во многих классических алгоритмах последовательного приближения используется детерминистская процедура приближения к оптимальному решению, которая начинается с решения, выбранного наугад, и затем задается направление поиска, основанное на заданном правиле переходов, например на прямых методах, в которых используется целевая функция и стоимости ограничений, и на градиентных способах, в которых используются производные первого и второго порядков. Однако последние способы имеют ряд недостатков, например, оптимальное решение зависит от выбранного начального решения, и большинство алгоритмов "застревают" на субоптимальном решении.
В отличие от классических способов поиска и оптимизации поиск в генетическом алгоритме начинается со случайного набора решений, вместо использования всего лишь одного решения. После выбора случайной популяции решений каждое из таких решений оценивается как задача нелинейного программирования, и каждому решению присваивается коэффициент "приспособленности" (сравнительное достоинство). В одном варианте осуществления изобретения "приспособленность" может быть представлена эвклидовым кодовым расстоянием между вычисленным решением и решением, полученным в результате измерения с помощью вышеприведенного уравнения (6).
Интуитивно чувствуется, что лучше тот алгоритм, который обеспечивает меньшее значение Δτmin.
При применении генетического алгоритма для получения решения для положений датчиков в нем в качестве хромосомы используется начальная популяция координат датчиков, которая может быть выбрана случайным образом или же может иметь значения, представляющие ранее измеренные и/или иным образом полученные или рассчитанные положения датчиков. В большинстве случаев для генетического алгоритма выполняется максимальное число итераций.
Например, "лучшей" особи в каждом поколении разрешается выжить без мутации, в то время как 100 особей, имеющие лучшие значения приспособленности, также выживают, однако используются для создания следующих 100 особей из пар выживших с использованием операторов кроссовера, мутации, воспроизведения, как описано, например, в Kalyanmoy Deb, Multi-Objective Optimization Using Evolutionary Algorithms ("Многоцелевая оптимизация с помощью эволюционных алгоритмов"), John Wiley & Sons, New York.
Хотя алгоритмы оценки по методу наименьших квадратов устойчивы к гауссовым шумам при измерении времени прихода ударной волны, однако любое устойчивое смещение при проведении этих измерений, например, вследствие изменения со временем чувствительности датчика, будет оказывать влияние на надежность определения координат точки выстрела. Кроме того, сбои или полный отказ датчика могут нарушить начальные предположения симметрии, которые присущи таким алгоритмам.
Одним из способов компенсации ухудшения характеристик датчика или выхода его из строя является контроль по времени вклада  каждого из датчиков в величину невязки
каждого из датчиков в величину невязки

Для каждого датчика измеряется время прихода  по каждому обрабатываемому выстрелу. Если все датчики работают нормально, то можно ожидать, что величины
по каждому обрабатываемому выстрелу. Если все датчики работают нормально, то можно ожидать, что величины  имеют случайное распределение.
имеют случайное распределение.
Однако если вклад каких-то датчиков в суммарную невязку устойчиво превышает ожидаемое значение, то их работоспособность и надежность находятся под вопросом и их вклад в вычисленную невязку должен быть соответственно уменьшен. И наоборот, вклад датчика, который устойчиво превышает ожидаемое значение его вклада в остаточную погрешность, должен быть уменьшен. Это может быть выполнено путем присвоения каждому датчику веса Wj, который обратно пропорционален среднему вкладу датчика в невязку в скользящем окне, которое может содержать, например, последние N выстрелов.
Если, как было указано выше, на характеристики конфигурации датчиков по измерению некоторых выстрелов влияет нарушение симметрии, то максимально возможная величина Δτmax будет ниже для некоторых выстрелов в зависимости от того, как ударная волна распространяется к датчикам. То есть для некоторых выстрелов конфигурация датчиков будет казаться короче, в то время как для других выстрелов конфигурация датчиков будет казаться длиннее. При вычислении текущего среднего вклада датчиков в невязку, этот вклад может быть нормализован по отношению к максимально возможной величине Δτmax для этих выстрелов, для обеспечения последовательного сравнения пропущенного времени прихода на последовательности различных выстрелов, имеющих различную геометрию.
Иными словами, вместо минимизации значения невязки в соответствии с уравнением (7) минимизируется величина
Взвешивание функции невязок с использованием коэффициентов Wj обеспечивает использование в большей степени измерений тех датчиков, которые демонстрируют более высокую надежность на последних выстрелах, то есть вносят меньший вклад в невязку Δτmin. Достоинство такого подхода заключается в том, что по мере того, как функционирование данного датчика улучшается (например, в его работе могут происходить периодические ухудшения), взвешенное среднее будет со временем восстанавливать его вклад. После ремонта или замены датчика, могут быть восстановлены полные значения его весовых коэффициентов. Других изменений алгоритма оптимизации не требуется.
В то время как изобретение раскрыто на примере подробно описанных предпочтительных вариантов его осуществления, для специалистов в данной области будут очевидными различные возможные модификации и улучшения изобретения. Соответственно, сущность и объем настоящего изобретения ограничивается только его формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2358275C2 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ ДО ТОЧКИ ВЫСТРЕЛА | 2008 |
|
RU2494336C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2408025C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК ПОЛЕТА ПУЛЬ И СНАРЯДОВ | 2002 |
|
RU2231738C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ПОЛЕТА СВЕРХЗВУКОВОГО СНАРЯДА | 2016 |
|
RU2670731C9 |
| БОРТОВАЯ СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКОВ | 2010 |
|
RU2512128C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ НА ОСНОВЕ АКУСТИЧЕСКИХ ДАТЧИКОВ | 2008 |
|
RU2392577C2 |
| ТИР | 2008 |
|
RU2388990C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ ПУЛЬ И СНАРЯДОВ | 2011 |
|
RU2470252C1 |
Использование: для калибровки относительного положения датчиков в системе обнаружения выстрела. Сущность: приблизительно определяют относительное положение датчиков; осуществляют, по меньшей мере, два выстрела в известных направлениях из разных точек, координаты которых известны; определяют разности времен прихода дульной и ударной волн для каждого из датчиков и для каждого выстрела; определяют относительные положения датчиков, которые имеют минимальную невязку разниц времен, по меньшей мере, для двух выстрелов. Также для компенсации ухудшения характеристик датчиков в системе определения координат точки выстрела посредством нескольких датчиков определяют времена прихода к датчикам ударных волн от выполненных выстрелов, после чего осуществляют выполнение регрессии методом наименьших квадратов для времен прихода к датчикам ударной волны для определения невязки измерения времени, затем производят контроль вклада каждого из датчиков в величину невязки измерения времени для нескольких выстрелов и осуществляют назначение каждому датчику весового коэффициента, который обратно пропорционален вкладу датчика в невязку измерения времени. Технический результат: повышение характеристик датчиков в системе определения координат точки выстрела. 2 н. и 12 з.п. ф-лы, 3 ил.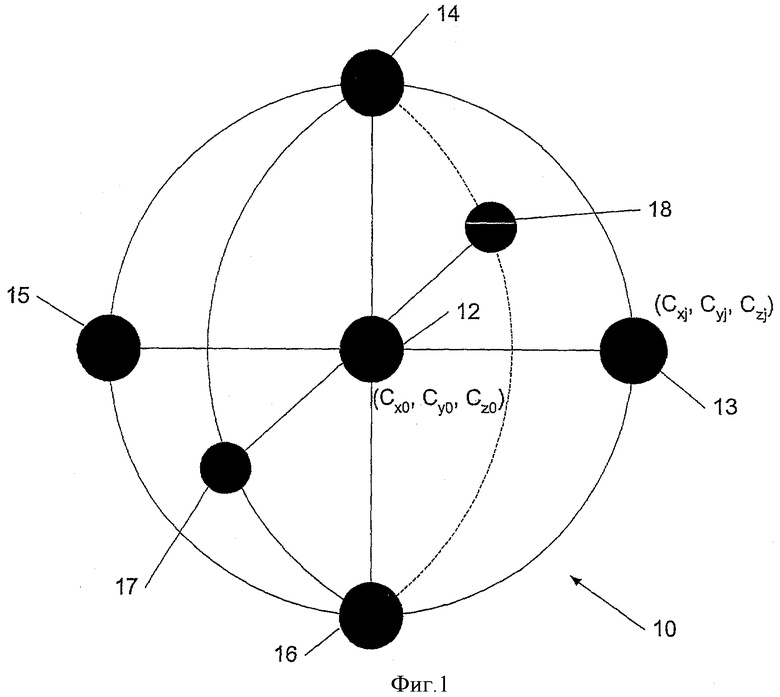
осуществление по меньшей мере двух выстрелов в известных направлениях из разных точек, координаты которых известны; определение разности времен прихода дульной и ударной волн для каждого из датчиков и для каждого выстрела; и определение относительных положений датчиков, которые имеют минимальную невязку разниц времен по меньшей мере для двух выстрелов.
выполнение регрессии методом наименьших квадратов для времен прихода к датчикам ударной волны для определения невязки измерения времени;
контроль вклада каждого из датчиков в величину невязки измерения времени для нескольких выстрелов; и назначение каждому датчику весового коэффициента, который обратно пропорционален вкладу датчика в невязку измерения времени.
| US 6178141 B1, 23.01.2001 | |||
| ГИРОПРИБОР | 1993 |
|
RU2082097C1 |
| US 5241518 A, 31.08.1993 | |||
| US 2003008265 A1, 09.01.2003 | |||
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ШТРИХКОДОВ С БУТЫЛОК | 2018 |
|
RU2692031C1 |
| DE 3528075 A1, 12.02.1987 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЙ ПАРАМЕТРОВ ТРАЕКТОРИИ БОМБЫ | 2002 |
|
RU2212620C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА НА МЕСТНОСТИ | 2005 |
|
RU2285272C1 |

