Изобретение относится к способам цифровой передачи данных, когда их используют, например, в цифровых системах мобильной связи, или способам цифровой передачи по двухпроводной линии связи. В частности, изобретение относится к способу подавления помех при передаче с множественным доступом с временным разделением каналов (МДВР) и/или частотным разделением каналов (МДЧР), которую можно по меньшей мере приблизительно описать как импульсно-амплитудную модуляцию, с произвольным количеством приемных антенн, где принятый по меньшей мере одной приемной антенной комплекснозначный сигнал фильтруется фильтром с комплекснозначными коэффициентами для создания по меньшей мере одного выходного сигнала. Здесь МДВР и МДЧР относятся к способам множественного доступа с временным разделением каналов и частотным разделением каналов соответственно. Кроме того, изобретение относится к системе, предназначенной для подавления помех при передаче с МДВР и/или МДЧР, которую по меньшей мере приблизительно можно описать как импульсно-амплитудную модуляцию, с произвольным количеством приемных антенн, где принятый по меньшей мере одной приемной антенной комплекснозначный сигнал фильтруется фильтрующим устройством с комплекснозначными коэффициентами для создания по меньшей мере одного выходного сигнала.
При цифровой передаче по дисперсионным каналам, таким как канал мобильной связи или двухпроводные линии связи, передаваемый сигнал искажается и ухудшается под воздействием шума. Следовательно, в приемнике необходимо предусмотреть специальные меры для восстановления переданных данных из принимаемого сигнала, то есть должен быть использован какой-то способ коррекции. Оптимальным способом коррекции дисперсионных каналов является оценивание последовательностей по критерию максимального правдоподобия (ОПМП), который описан в работе G.D Forney, Jr. "Maximum-Likelihood Sequence Estimation of Digital Sequences in the Presence of Intersymbol Interference", IEEE Transactions on Information Theory, IT-18, 363-378, May 1972 и который может быть реализован с использованием алгоритма Витерби. Однако для канальных импульсных характеристик большой длительности и/или недвоичных наборов сигналов алгоритм Витерби неприменим из-за его большой вычислительной сложности. Следовательно, в этих случаях необходимо использовать способы субоптимального оценивания последовательностей с приведением состояний (ОППС), описанные в работе M.V.Eyuboglu, S.U.Qureshi "Reduced-State sequence Estimation with Set Partitioning and Decision Feedback", IEEE Trans. on Communication, COM-36, 13-20, January 1988, или оценивания последовательностей с решающей обратной связью (ОПРОС), описанное в работе A.Duel-Hallen, C.Heegard "Delayed Decision-Feedback Sequence Estimation" IEEE Trans. on Communication, COM-37, 428-436, May 1989.
Все вышеуказанные способы оптимизированы для случая, когда принимаемый сигнал ухудшается под воздействием аддитивного белого гауссова шума (АБГШ). При наличии дополнительных возмущений из-за помех от других передаваемых сигналов следует ожидать, что способ коррекции существенно теряет свою эффективность из-за метрического несоответствия и слишком большого диапазона изменения возмущений. Возмущения из-за помех становятся все более важным фактором в системах мобильной связи и в двухпроводных системах. Снижение отдачи по мощности приводит к помехам от соседнего канала (ПСК) и внутриканальным помехам (ВКП, то есть полезный сигнал и помеха занимают одну и ту же полосу частот), если не предпринять дополнительных мер. Перед коррекцией помехи должны быть значительно снижены путем использования соответствующего способа предварительной обработки, с тем чтобы остаточное ухудшение было как можно меньше и представляло собой белый шум. Поскольку при способе блочной передачи спектральная характеристика помех изменяется от блока к блоку, для предварительной обработки необходима настройка в каждом блоке. Подходящая стратегия предварительной обработки была предложена в работе S.Ariyavisitakul, J.H.Winters, N.R.Sollenberger "Joint Equalization and Interference Suppression for High Data Rate Wireless Systems", in Proceedings of Vehicular Technology Conference (VTC'99 Spring), 700-706, Houston, Texas, 1999. Однако при этой стратегии высокое качество функционирования может быть достигнуто только для приема с разнесением, то есть необходимо иметь по меньшей мере две приемные антенны. Основные положения упомянутой работы были использованы для формулирования преамбулы независимых пунктов формулы изобретения.
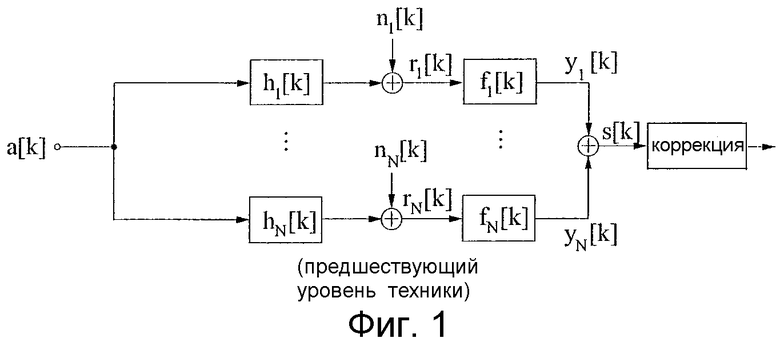
Хорошо известно, что передачу по дисперсионному каналу, создающему межсимвольные помехи (МСП), с импульсно-амплитудной модуляцией (ИАМ) можно смоделировать в виде системы с дискретным временем, как показано на фиг.1. Здесь рассматривается общий случай с N-кратным разнесением (N≥1) в приемнике, в то время как моноприем (N=1) является частным случаем. После дискретизации при частоте 1/Т символов принятые сигналы задаются сверткой переданной ИАМ последовательности a[k] с импульсной характеристикой hi[k] длительностью Li для канала, соответствующего i-й антенне, с учетом ухудшения из-за возмущения:

В зависимости от принятого способа модуляции амплитудные коэффициенты a[k] и канальные импульсные характеристики hi[k] являются либо чисто действительными или чисто мнимыми, либо комплексными. Согласно изобретению далее рассматриваются только те способы модуляции, где амплитудные коэффициенты можно моделировать в приемнике как чисто действительные, чисто мнимые, либо лежащие на произвольной прямой в комплексной плоскости. Например, способы двоичной непрерывной фазовой модуляции (НФМ), которые часто применяют в системах мобильной связи благодаря обеспечиваемому ими эффективному использованию полосы пропускания и малому отношению пиковой мощности к средней мощности, могут быть приблизительно описаны ИАМ сигналами, как это изложено в работе P.A.Laurent "Exact and approximate construction of digital phase modulations by superposition of amplitude modulated pulses (AMP)", IEEE Trans. on Commun., COM 34, 150-160, 1986. Возмущение ni[k] с дискретным временем имеет две составляющие:
ni[k]=ni AWGN[k]+ni INT[k](2)
где ni AWGN[k] относится к составляющей АБГШ, которая имеет нулевое среднее значение и гауссово распределение и представляет собой белый шум (последнее выполняется, если перед дискретизацией в качестве входного фильтра приемника с непрерывным временем используется согласованный фильтр-преобразователь к белому шуму, описанный в работе G.D Forney, Jr. "Maximum-Likelihood Sequence Estimation of Digital Sequences in the Presence of Intersymbol Interference", IEEE Transactions on Information Theory, IT-18, 363-378, May 1972, или обычный фильтр Найквиста с извлечением квадратного корня). Возмущение от составляющей ni AWGN[k] возникает главным образом из-за теплового шума во входном каскаде приемника. Составляющая ni INT[k] относится к возмущению из-за помех,

Здесь hiμ INT[k] относится к канальной импульсной характеристике от μ-го источника помех на приемную антенну i, а Li,μ INT - длительность соответствующей импульсной характеристики. Рассматривается общий случай с I источниками помех, чьи символы данных обозначены как aμ INT[k]. Предполагается, что согласно изобретению здесь опять же используются способы модуляции с чисто действительными или чисто мнимыми амплитудными коэффициентами, либо с амплитудными коэффициентами, которые лежат на произвольной прямой в комплексной плоскости. Поскольку чисто мнимые амплитудные коэффициенты и амплитудные коэффициенты, которые лежат на произвольной прямой, можно преобразовать в чисто действительные амплитудные коэффициенты путем простого поворота фазы, далее рассматривается лишь последний случай.
Если непрерывно принимаемые сигналы разных антенн подвергнуть дробно-интервальной дискретизации с частотой К/Т дискретизации (где К - коэффициент передискретизации, например К=2), в принципе получится та же самая модель. В этом случае принимаемые в дискретном времени сигналы разных антенн могут быть представлены К полифазными составляющими с частотой символов (1/T). Следовательно, количество сигналов, принимаемых дискретно с частотой символов, возрастает до N·K. Таким образом, к дробно-интервальной дискретизации также принципиально применимы следующие соображения. В принципе имеются два различных подхода для восстановления переданных символов, смотри, например, C.Tidesav, M.Sternad, A.Ahlen "Reuse Within a Cell - Interference Rejection or Multiuser Detection" IEEE Trans. on Commun., COM-47, 1511-1522, October 1999.
В первом подходе используются принципы многопользовательского обнаружения, то есть последовательности a[.] и аμ INT[.], μ∈{1,2,...,I} символов оцениваются совместно (совместное оценивание последовательностей по критерию максимального правдоподобия). В выражениях для последовательностей символов точка [.] указывает всю последовательность символов а[k], причем -∞<k<+∞. При этом подходе можно достичь оптимального качества оценивания. К сожалению, для совместного (или итеративного) оценивания вычислительная сложность очень высока. Кроме того, при этом подходе требуются канальные импульсные характеристики hi,μ INT[k], оценивание которых крайне затруднено, поскольку приемник обычно не знает обучающие последовательности помех, а также неизвестно время появления обучающих последовательностей; смотри, например, B.C.Wah Lo, K.Ben Letaief "Adaptive Equalization and Interference Cancellation for Wireless Communication Systems", IEEE Trans. on Commun. COM-47, 538-545, April, 1999.
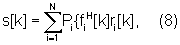
По этим причинам более предпочтительным является второй подход, где выполняется подавление помех с последующей коррекцией. Способ, основанный на этом подходе, был предложен в работе S.Ariyavisitakul, J.H.Winters, N.R.Sollenberger "Joint Equalization and Interference Suppression for High Data Rate Wireless Systems", in Proceedings of Vehicular Technology Conference (VTC'99 Spring), 700-706, Houston, Texas, 1999. С помощью этого способа N различных сигналов yi[k], принимаемых дискретно, предварительно фильтруют по отдельности, а затем предварительно отфильтрованные выходные сигналы суммируют, смотри фиг.1. После этого выполняется коррекция, например, ОПМП, ОППС, ОПРОС или коррекция с решающей обратной связью (КРОС). Результирующая блок-схема приемника изображена на фиг.1. Сигнал после предваряющей фильтрации и суммирования задается выражением

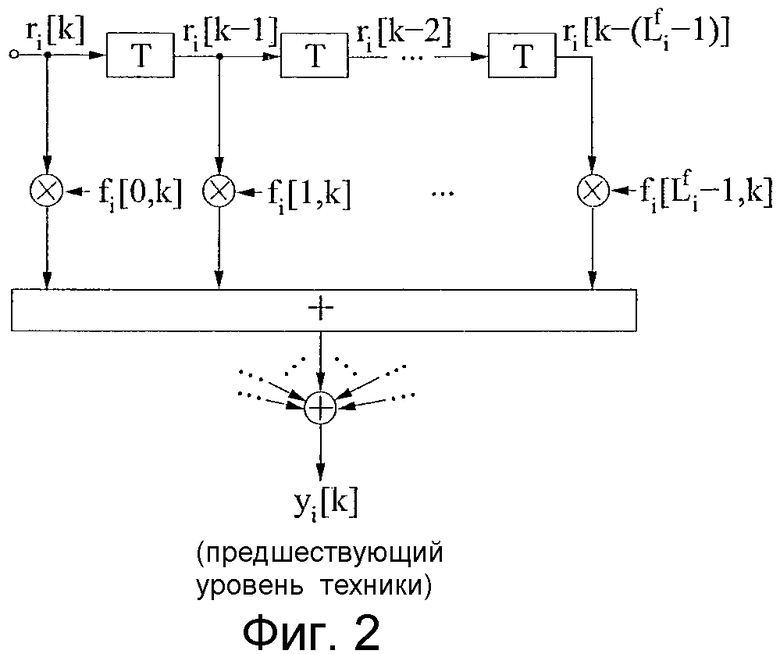
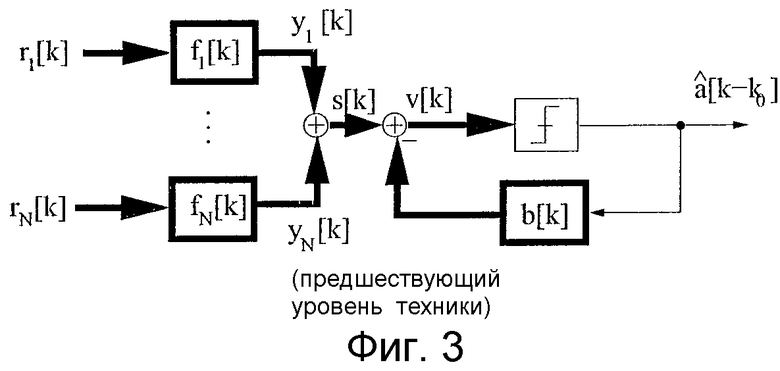
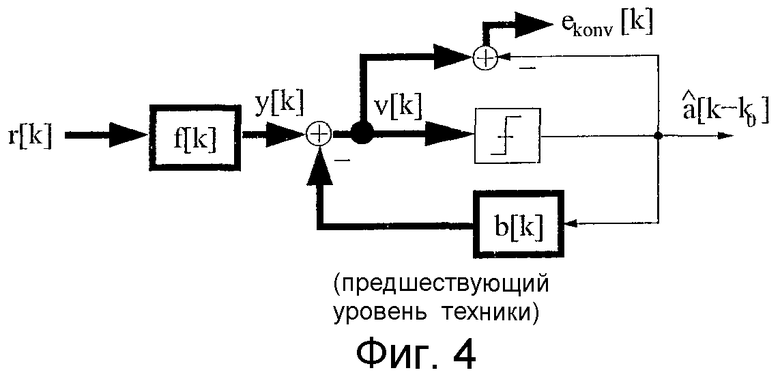
i-фильтр, предназначенный для фильтрации принимаемой последовательности ri[k], подробно показан на фиг.2. Оптимизация импульсных характеристик fi[k] фильтра со значениями длительности Li f может быть выполнена, например, с использованием адаптивного корректора с решающей обратной связью с множеством входов и одним выходом, функционирующего согласно критерию минимума среднеквадратической ошибки, структура которого показана на фиг.3. Жирные и тонкие линии на фигуре относятся к сигналам и системам с комплексными значениями и действительными значениями соответственно. На фиг.4 показана структура для частного случая с одной приемной антенной (N=1). В корректоре КРОС комплекснозначные импульсные характеристики fi[k] представлены предваряющими фильтрами, причем эти характеристики должны быть совместно адаптивно оптимизированы с помощью комплекснозначного фильтра b[k] обратной связи. После завершения процесса адаптации коэффициенты предваряющих фильтров переносятся в структуру по фиг.1. Если значения длительности характеристик фильтров выбраны достаточно большими, то после суммирования помехи значительно уменьшаются, и кроме того общее возмущение в этом месте примерно представляет собой белый шум с гауссовым распределением, а значит оказывается оправданным последующее применение способов коррекции на основе решеток.
Решение в аналитическом виде для расчета предварительных фильтров, предложенное, например, в EP 99301299.6 для расчета предварительного фильтра для ОПРОС/ОППС и возмущения исключительно для белого шума, не может быть использовано. Для этого должны быть известны не только импульсные характеристики hi[k], но также импульсные характеристики hi,μ INT[k] помех. Однако их оценка достаточно сложна, поскольку в общем случае в приемнике не известны обучающие последовательности помех. Следовательно, расчет фильтров должен выполняться с использованием рекурсивного адаптивного алгоритма. В работе S.Ariyavisitakul, J.H.Winters, N.R.Sollenberger "Joint Equalization and Interference Suppression for High Data Rate Wireless Systems", in Proceedings of Vehicular Technology Conference (VTC'99 Spring), 700-706, Houston, Texas, 1999, предложено применение рекурсивного алгоритма на основе метода наименьших квадратов (РАМНК) для оптимизации фильтра, смотри также S.Haykin "Adaptive Filter Theory" Prentice Hall, Upper Saddle River, New Jersey, third edition, 1996. Существенным недостатком этого подхода является то, что в случае моноприема (N=1) невозможно обеспечить высокое качество функционирования. Главная причина этого состоит в том, что в этом случае помеха не может быть достаточно эффективно подавлена. Обратимся к фиг.3, где для случая N=2 сигналы r1[k] и r2[k] включают соответственно принятый сигнал и шум, причем помехи содержатся в шуме. Путем соответствующей настройки коэффициентов фильтров помехи могут подавить друг друга. В случае N=1 имеется только один принимаемый сигнал, и следовательно, взаимное уничтожение помех невозможно в принципе. Из ЕР 0669729 известно использование антенных решеток для подавления помех и шума. Сигналы, принимаемые одиночными приемными антеннами, собираются в один вектор, который проецируется на разные векторы, определяемые с использованием матрицы пространственной корреляции для общего возмущения, состоящего из помех и канального шума. Таким образом, можно пространственно декореллировать общее возмущение и без труда выполнить оптимальное сложение предварительно обработанных сигналов от антенн для уменьшения возмущения. Затем полезный сигнал, который дополнительно ухудшается межсимвольными помехами, восстанавливают с использованием известного способа одномерной комплексной коррекции. Проекции, выполняемые в этом способе, выполняются на векторы, размерность N которых соответствует количеству N антенн. При использовании только одной приемной антенны подавление помех невозможно.
Таким образом, задачей настоящего изобретения является совершенствование способов и систем указанного типа таким образом, чтобы обеспечить возможность более эффективного подавления помех. Согласно дополнительному аспекту изобретения также должна быть обеспечена возможность хорошего подавления помех для моноприема. Кроме того, желательно обеспечить более высокое качество приема с разнесением по сравнению с ранее предложенными способами подавления помех.
Эти задачи решаются с помощью данного изобретения путем использования способа с признаками по пункту 1 формулы изобретения и системы с признаками по пункту 12 формулы изобретения. Изобретение основано на наблюдении, состоящем в том, что помеха и сигнал могут быть разделены, когда они представлены в виде последовательности проекций. Поскольку обрабатываются только проекции принимаемых сигналов, можно найти и использовать коэффициенты фильтров для минимизации ошибки в сумме спроецированных сигналов, которая единственно и представляет интерес.
Способ и система согласно изобретению позволяют обеспечить (адаптивное) подавление помех при коррекции с разнесением антенн или без него при передаче с импульсно-амплитудной модуляцией с чисто действительными или чисто мнимыми последовательностями данных, либо последовательностями данных, которые лежат на произвольной прямой в комплексной плоскости, и достаточно отличающимися импульсными характеристиками. В частности, может быть достигнуто значительно лучшее по сравнению со способами предшествующего уровня техники подавление помех для моноприема. При использовании предложенного в изобретении способа в общем случае можно подавить 2N-1 помех, в то время как при использовании известных способов можно подавить только N-1 помех. С помощью предложенного в изобретении способа можно значительно уменьшить частоту появления ошибок при последующей коррекции.
Обычно при практической реализации предложенного способа не возникает дополнительных сложностей, а иногда даже появляется возможность упростить техническое решение по сравнению со способами предшествующего уровня техники. Сравнение способов предшествующего уровня техники, соответствующих фигурам 3 и 4, с новой структурой, соответствующей фигурам 6 и 7, показывает, что дополнительно необходимо выполнить только проекции с P1{.} до Pn{.}, причем фильтр обратной связи получается более простым и имеет только действительнозначные коэффициенты.
В наиболее предпочтительном варианте осуществления изобретения имеются по меньшей мере два принимаемых сигнала ri[k], и на этапе b) выполняется проецирование по меньшей мере двух выходных сигналов yi[k] на идентично направленные векторы. Эта мера дает то преимущество, что этап проецирования и этап суммирования могут быть переставлены местами, а проекции после суммирования могут быть получены путем выполнения одной операции проецирования.
В еще одном предпочтительном варианте осуществления для фильтрации принимаемых сигналов на этапе а) используют предваряющие фильтры корректора КРОС с действительнозначным фильтром обратной связи, которые систематически оптимизируют, причем в качестве критерия оптимизации можно принять, в частности, критерий нулевой частоты, критерий минимальной среднеквадратичной ошибки (МСКО) или критерий на основе усечения импульсов. Следовательно, коэффициенты фильтров можно достаточно просто оптимизировать.
Для оптимизации коэффициентов фильтров предпочтительно использовать сигналы после проецирования. Это позволяет улучшить подавление помех, поскольку помехи в сумме ортогональных дополнений проекций подвергаются сдвигу.
Для настройки коэффициентов по меньшей мере одного комплекснозначного фильтра можно использовать произвольный адаптивный алгоритм. Это гарантирует автоматическое достижение настройки для соответствующей конкретной ситуации с помехами.
В адаптивном алгоритме для настройки коэффициентов фильтров можно использовать обучающую последовательность, известную в приемнике. Если известная обучающая последовательность не передается, либо если известная обучающая последовательность слишком коротка, то для настройки коэффициентов фильтров можно использовать "слепой" адаптивный алгоритм.
Из расчета ортогонального дополнения проекции по меньшей мере одного отфильтрованного выходного сигнала yi[k] можно легко получить критерий качества передачи.
Если используют разнесение передающих антенн, то на первом этапе по меньшей мере часть передаваемых сигналов можно интерпретировать как помеху и подавить ее, используя предложенный в изобретении способ. Далее, на втором этапе символы данных, обнаруженные на первом этапе, можно использовать для моделирования соответствующих частей принимаемого сигнала; посредством формирования разностного сигнала можно удалить соответствующие части сигнала из принимаемого сигнала, после чего появляется возможность обнаружить остальные символы данных, которые на первом этапе были интерпретированы как помехи. В альтернативном варианте на втором этапе может быть повторен первый этап, однако тогда символы данных, которые были обнаружены на первом этапе, интерпретируются как помехи, а символы данных, которые были на первом этапе интерпретированы как помехи, теперь интерпретируются как полезные данные. Таким образом, данный способ также хорошо подходит для достижения высокого качества функционирования при разнесении передающих антенн.
Дополнительные варианты изобретения, дающие преимущества, определены в подпунктах формулы изобретения.
Далее со ссылками на прилагаемые чертежи подробно описываются примеры вариантов изобретения. Можно видеть, что
фиг.1 - вариант блок-схемы с дискретным временем для системы цифровой передачи с N-кратным разнесением антенн на приемнике (предшествующий уровень техники);
фиг.2 - подробное изображение i-го предваряющего фильтра, предназначенного для фильтрации i-го принимаемого сигнала (предшествующий уровень техники);
фиг.3 - блок-схема, представляющая известный приемник с КРОС для случая с N приемными антеннами (предшествующий уровень техники);
фиг.4 - блок-схема, представляющая известный приемник с КРОС для случая одной приемной антенны (предшествующий уровень техники);
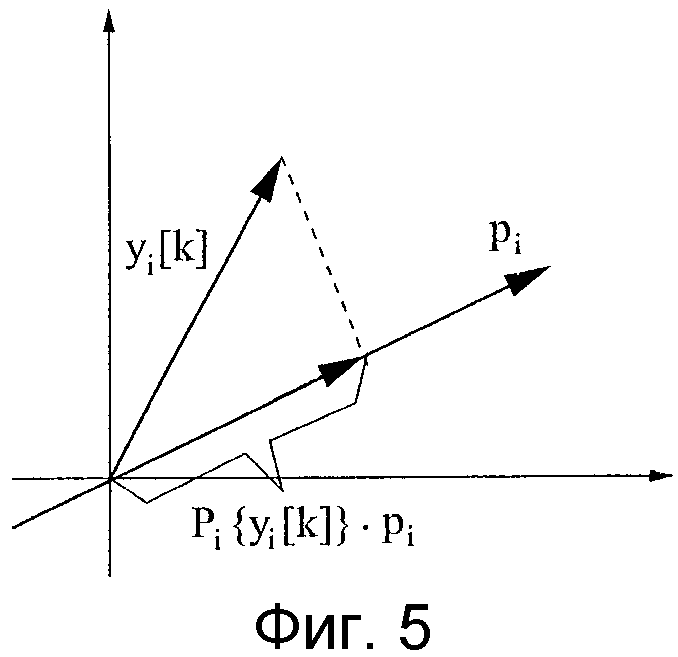
фиг.5 - схематическое представление проекции Pi{yi[k]} сигнала yi[k] на комплексный вектор pi единичной длины;
фиг.6 - приемник с КРОС для случая с N приемными антеннами при выполнении проекций после предваряющей фильтрации согласно изобретению;
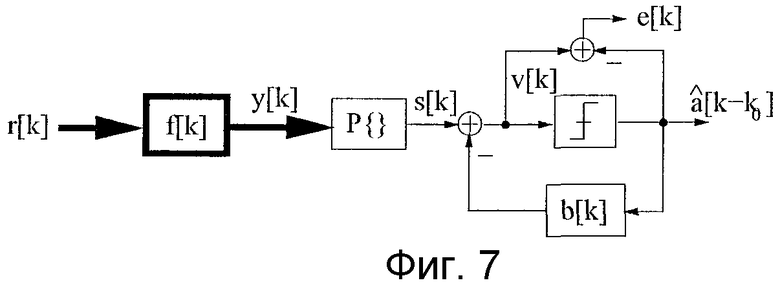
фиг.7 - приемник с КРОС для случая с одной приемной антенной (моноприем) при выполнении одной проекции после предваряющей фильтрации согласно изобретению; и
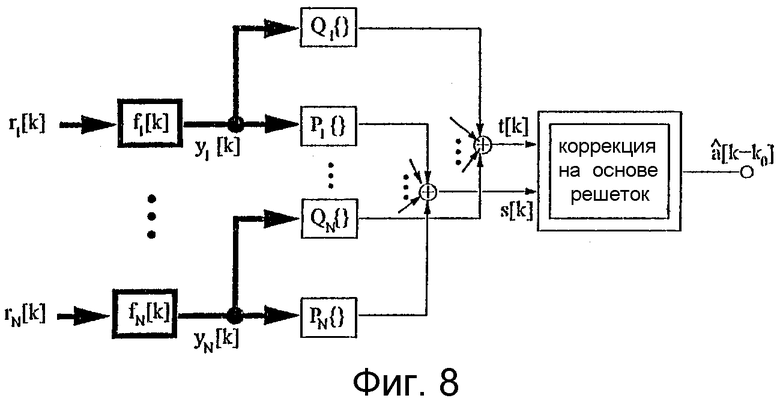
фиг.8 - приемник с КРОС, в котором выполняется дополнительная обработка суммы ортогональных дополнений проекций выходных сигналов предваряющих фильтров.
Улучшенное подавление помех достигается в изобретении посредством модификации структуры корректора КРОС по фиг.3 и фиг.4 соответственно. После операций предваряющей фильтрации с комплекснозначными коэффициентами выполняется проецирование Pi{.} на комплексные векторы pi единичной длины, в результате чего получаются проекции Pi{yi[.]} с чисто действительными значениями, смотри фиг.5. Это приводит к структуре по фиг.6. Поскольку сигнал y[k] действительнозначный, для фильтрации в цепи обратной связи достаточно иметь фильтр b[k] с чисто действительными коэффициентами; сигнал ошибки e[k]=v[k]-a[k-k0] также чисто действительнозначный. Таким образом, при минимизации мощности e[k] не рассматриваются возможные ортогональные дополнения выходных сигналов предваряющих фильтров применительно к операторам Pi{.} проецирования, что возможно, поскольку в любом случае для процесса решения для одномерных амплитудных коэффициентов с действительными значениями интерес представляет только одна размерность. Теперь можно настроить коэффициенты фильтров специально для минимизации ошибки суммы спроецированных сигналов, которая и представляет единственный интерес, в то время как ортогональные дополнения не учитываются. В результате соответствующего выбора коэффициентов фильтров возмущение из-за помех может быть сдвинуто по большей части в сумму ортогональных дополнений проекций выходных сигналов предваряющих фильтров, что не существенно для данного решения. Следовательно, сумму ортогональных дополнений можно, если это необходимо, использовать для оценки мощности помех. При практической реализации представляет интерес частный случай, когда все N векторов проекций выходных сигналов yi[k] идентичны, и, следовательно, проекции могут быть реализованы в виде одной проекции после суммирования.
Оказывается, что можно достичь весьма эффективного подавления помех, если правильно настроить коэффициенты fi[k] предваряющих фильтров 1≤i≤N, при условии, что канальные импульсные характеристики hi[k] и hi,μ INT[k] в достаточной степени различаются, а последовательности ai[k] и aμ INT[k] символов данных действительнозначные. После предварительной фильтрации с помощью предваряющих фильтров модифицированного корректора КРОС для подавления помех согласно фиг.6 и последующего проецирования выходных сигналов фильтров коррекцию можно выполнить, приняв, например, такой способ оценивания последовательностей, как ОПМП, ОПРОС или ОППС. Составляющая сигнала  согласно данному способу коррекции определяется выражением
согласно данному способу коррекции определяется выражением

Если это необходимо, контроль требуемого уровня сложности можно обеспечить путем выбора длины Lb фильтра обратной связи, то есть количества коэффициентов b[k] (усечение импульсов посредством КРОС). Для оптимизации фильтров КРОС можно применить различные критерии, например, критерий обращения в нуль незначащих коэффициентов (ОННК), критерий максимума отношения сигнал-шум (ОСШ), либо критерий минимальной среднеквадратической ошибки (МСКО). В частном случае рассматривается адаптивная настройка корректора КРОС согласно критерию МСКО с использованием алгоритма минимальной среднеквадратической ошибки (АМСКО). С целью адаптации необходимо учесть, что в этом алгоритме для вычисления ошибки и фильтрации по цепи обратной связи необходимо знание символов данных. Следовательно, для адаптации корректора КРОС также используют обучающую последовательность, которая передается во многих системах передачи для облегчения оценивания каналов, то есть для вычисления ошибки и фильтрации в цепи обратной связи используют обучающие символы. Во время передачи символов данных адаптацию можно продолжать в режиме прямого решения, то есть вместо обучающих символов использовать предварительно оцененные символы данных, доставленные корректором, которые совпадают с действительными символами данных с достаточно высокой вероятностью после периода обучения. В альтернативном варианте вместо алгоритма АМСКО может быть использован рекурсивный алгоритм на основе метода наименьших квадратов (РАМНК), либо "слепой" адаптивный алгоритм, для которого требуется только знание статистики переданной последовательности данных, а не сами символы данных. Однако для "слепых" адаптивных алгоритмов неизбежна более медленная сходимость, чем для адаптивных алгоритмов с обучением.
В целях упрощения для описания алгоритма АМСКО для адаптации предложенной новой структуры корректора КРОС (комплексно сопряженные) коэффициенты фильтров объединяют в векторы
fi[k]=[fi[0,k] fi[1,k]···fi[Li f-1,k]]H, i∈{1,2,...,N},(6)
b[k]=[b[1,k] b[2,k]···b[Lb,k]]T,(7)
где ((.)H и (.)T относятся к эрмитовой транспозиции и транспозиции соответственно). Теперь в результате адаптации коэффициенты фильтров изменяются во времени. Это можно видеть из того, что теперь коэффициенты фильтров также зависят от реального времени k. Сигнал y[k] после получения проекций и суммирования задается выражением
где
ri[k]=[ri[k] ri[k-1]···ri[k-(Li f-1)]]T, i∈{1,2,...,N}(9)
Входной сигнал ограничителя по максимуму и минимуму из состава корректора КРОС окончательно задается выражением

где

Задержка k0 решения представляет собой степень свободы, которую можно использовать для оптимизации отдачи по мощности. Для этого обозначим последовательность данных, оцениваемую корректором КРОС, как  . Если в качестве обучающей последовательности имеется известная последовательность данных (режим обучения), то можно заменить на известные символы a[.] данных. Соответственно, на фиг.6 последовательность необходимо заменить на a[.] для вычисления ошибки и обратной связи. Сигнал ошибки для корректора КРОС определяется выражениями
. Если в качестве обучающей последовательности имеется известная последовательность данных (режим обучения), то можно заменить на известные символы a[.] данных. Соответственно, на фиг.6 последовательность необходимо заменить на a[.] для вычисления ошибки и обратной связи. Сигнал ошибки для корректора КРОС определяется выражениями

и

Далее векторы коэффициентов фильтров и векторы входных сигналов фильтров объединяют в единый вектор согласно соответствующим выражениям:

Алгоритм АМСКО для адаптивной настройки векторов коэффициентов фильтров задается следующим уравнением, описанным в работе S.Haykin "Adaptive Filter Theory" Prentice Hall, Upper Saddle River, New Jersey, third edition, 1996:
w[k+1]=w[k]-μe[k]u[k],(16)
где μ относится к параметру размера шага, который необходимо правильно выбрать, чтобы обеспечить как быструю сходимость, так и устойчивость. Рекурсия инициализируется, например, согласно условию
w[0]=0(17)
Описанную структуру корректора КРОС можно также использовать для подавления помех, если применяется дополнительное M- кратное (M≥1) разнесение передающих антенн, что, например, имеет место в случае передачи, кодированной посредством пространственно-временного кодирования, для увеличения пропускной способности, как это описано в работе A.F.Naguib, N.Seshadri, and A.R.Calderbank "Increasing Data Rate over Wireless Channels", IEEE Signal Processing Magazine, 76-92, May 2000. Предложенный способ можно использовать, например, непосредственно в сочетании со способом пространственно-временного кодирования, предложенным в работе J.H.Winters "The Diversity Gain of Transmit Diversity in Wireless Systems with Rayleigh Fading", IEEE Transactions on Vehicular Technology, 119-123, February 1998. Применительно к изобретению приближенные способы ИАМ передачи представляют собой способы, в которых передаваемый сигнал можно достаточно точно описать в виде ИАМ сигнала, что имеет место, например, в случае двоичной непрерывной фазовой модуляции (НФМ).
В качестве частного случая рассмотрим далее вариант с моноприемом (N=1). Этот случай представляет интерес в основном для мобильных станций. Здесь, в отличие от базовых станций, разнесение антенн обычно нельзя использовать, поскольку это противоречит предъявляемым к мобильному телефону требованиям компактности, низкого энергопотребления и дешевизны. Опять же предположим, что последовательность данных полезного сигнала и последовательности данных источников помех чисто действительнозначные и что соответствующие импульсные характеристики достаточно отличаются друг от друга. Соответствующая структура корректора КРОС с проекцией P{.} изображена на фиг.7.
Хотя описанные структуры гарантируют очень хорошее подавление помех, если значения длины Li f и Lb фильтров достаточно велики, то по причине сложности и из-за слишком короткой обучающей последовательности на практике обычно используют относительно короткие предваряющие фильтры и фильтр обратной связи. В этом варианте сигнал в соответствии с уравнением (8) содержит в общем случае шумовую составляющую из-за остаточной помехи, которой нельзя пренебречь, и без принятия дополнительных мер наблюдается значительное ухудшение качества функционирования. Следовательно, при использовании коротких фильтров КРОС способ должен быть усовершенствован, как показано в качестве примера на фиг.8. С этой целью сумму ортогональных дополнений проекций выходных сигналов предваряющих фильтров можно также представить в виде

где Qi{.} относится к проекциям на комплексные векторы qi единичной длины. Таким образом, вектор qi ортогонален вектору pi, который принадлежит проекции Pi{.}. В общем случае сигнал t[k] содержит большую шумовую составляющую, чем сигнал s[k], однако он также содержит составляющую полезного сигнала, то есть

где как импульсная характеристика c[.],чьи коэффициенты не равны нулю на интервале k1≤k≤k2, так и возмущение nt[k], которое состоит из шума и помехи, имеют чисто действительные значения. После завершения адаптации корректора КРОС коэффициенты c[k] можно легко определить, используя какой-либо способ оценивания канала. После оценивания канала можно оценить дисперсию  возмущения nt[k].
возмущения nt[k].
Теперь сигнал t[k] выгодно использовать также в способе коррекции на основе решеток. С этой целью сигнал s[k] записывают в виде

где возмущение ns[k] имеет дисперсию  и опять же состоит из шума и помехи. Для того, чтобы воспользоваться преимуществами обоих сигналов s[k] и t[k], в способе коррекции на основе решетки в решетчатой диаграмме можно использовать, например, метрику ветвлений (оптимальное сложение).
и опять же состоит из шума и помехи. Для того, чтобы воспользоваться преимуществами обоих сигналов s[k] и t[k], в способе коррекции на основе решетки в решетчатой диаграмме можно использовать, например, метрику ветвлений (оптимальное сложение).
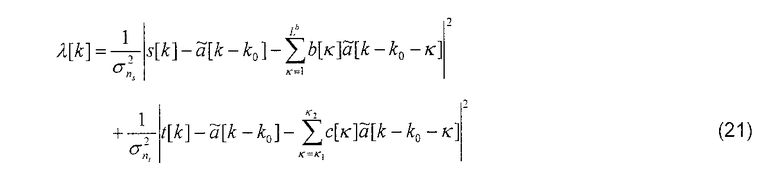
где для коррекции ОПМП выражение  относится к пробным символам, которые зависят от переходов состояний; для способов коррекции с приведением состояний
относится к пробным символам, которые зависят от переходов состояний; для способов коррекции с приведением состояний  относится к пробным символам и содержимому регистров, зависящему от состояния, для к≤кred, и к>кred соответственно, где кred зависит от выбранного способа приведения состояний. Заметим, что в уравнении (21) предполагается, что возмущения ns[.] и nt[.] представляют собой белый гауссов шум и являются статистически независимыми. На практике это выполняется лишь приблизительно и, в частности, nt[.] обычно не является белым шумом. Следовательно, предпочтительно фильтровать сигнал t[k] до коррекции на основе решеток с помощью фильтра - преобразователя к белому шуму, который преобразует nt[.] в белое возмущение и который можно рассчитать из автокорреляционной последовательности nt[.], причем автокорреляционная последовательность должна быть оценена с использованием подходящего способа. В уравнении (21)
относится к пробным символам и содержимому регистров, зависящему от состояния, для к≤кred, и к>кred соответственно, где кred зависит от выбранного способа приведения состояний. Заметим, что в уравнении (21) предполагается, что возмущения ns[.] и nt[.] представляют собой белый гауссов шум и являются статистически независимыми. На практике это выполняется лишь приблизительно и, в частности, nt[.] обычно не является белым шумом. Следовательно, предпочтительно фильтровать сигнал t[k] до коррекции на основе решеток с помощью фильтра - преобразователя к белому шуму, который преобразует nt[.] в белое возмущение и который можно рассчитать из автокорреляционной последовательности nt[.], причем автокорреляционная последовательность должна быть оценена с использованием подходящего способа. В уравнении (21)  , t[k] и c[.] необходимо заменить на дисперсию шума в выходном сигнале фильтра - преобразователя к белому шуму, на сигнал на выходе фильтра - преобразователя к белому шуму и на свертку исходной импульсной характеристики с импульсной характеристикой фильтра - преобразователя к белому шуму соответственно.
, t[k] и c[.] необходимо заменить на дисперсию шума в выходном сигнале фильтра - преобразователя к белому шуму, на сигнал на выходе фильтра - преобразователя к белому шуму и на свертку исходной импульсной характеристики с импульсной характеристикой фильтра - преобразователя к белому шуму соответственно.
С помощью двух предложенных канальных структур может быть достигнут эффект разнесения, и, следовательно, высокое качество функционирования даже при использовании коротких фильтров КРОС.
Изобретение относится к способам цифровой передачи данных, в частности к способу подавления помех при передаче МДВР и/или МДЧР. Достигаемый технический результат - эффективное подавление интермодуляционных помех. Модифицирована, по сравнению с предыдущем уровнем техники, структура предварительной фильтрации, где сразу после комплекснозначной предварительной фильтрации выполняется проецирование на комплексные векторы. Тем полагается, что используется передача с импульсно-амплитудной модуляцией с действительнозначными последовательностями данных и что канальные импульсные характеристики достаточно отличаются друг от друга. Способ применим как для случая разнесения антенн, так и для моноприема. Для предварительной фильтрации особенно хорошо подходят предваряющие фильтры корректора с разрешающей обратной связью с действительнозначным фильтром обратной связи. Настройку этих фильтров можно выполнить, например, с помощью алгоритма минимальной среднеквадратичной ошибки. 3 н.п. и 10 з.п. ф-лы, 8 ил.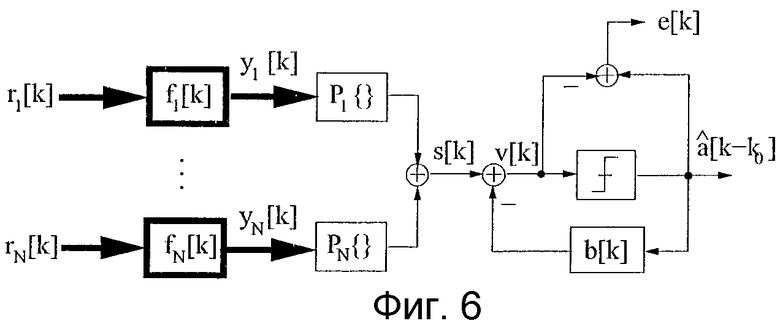
a) фильтруют по меньшей мере один принимаемый комплекснозначный сигнал ri[k] приемной антенны с помощью фильтра с комплекснозначными коэффициентами fi[k] для формирования по меньшей мере одного выходного сигнала yi[k];
b) формируют впоследствии по меньшей мере одну проекцию Рi упомянутого по меньшей мере одного выходного сигнала yi[k] на вектор рi направления, который назначают этому выходному сигналу yi[k], причем вектор pi направления является комплексным вектором, независимо от количества приемных антенн;
причем в случае, когда количество проекций Рi равно единице:
с1) подают проекцию Рi в устройство обнаружения; или в случае, когда количество проекций Рi равно двум или более:
d1) суммируют по меньшей мере часть проекций Рi для формирования сигнала s[k] суммы; и
d2) подают сигнал s[k] суммы в устройство обнаружения.
| ЕР 0669729 А1, 30.08.1995 | |||
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОГО ПОДАВЛЕНИЯ ПОМЕХ | 1990 |
|
SU1802616A1 |

