Область техники, к которой относится изобретение.
Изобретение относится к способам определения навигационных параметров движения крылатых беспилотных летательных аппаратов (БЛА) и может быть использовано при управлении БЛА, совершающего полет в режиме планирования.
Уровень техники.
Известен способ управления полетом, который реализован в известной системе управления. В данной системе измеряют и формируют управляющее воздействие на управляющие органы с целью изменения траектории. В качестве измерителя координат управляемого объекта (УО) используется система инерциальной навигации (см. Справочник по радиоэлектронике, том 3, под общей ред. проф., д.т.н. А.А.Куликовского. - М.: Энергия, 1970 г. - 816 с., с.557).
Причина, препятствующая достижению указанного ниже технического результата при использовании известного способа, заключается в том, что вырабатываемые инерциальной системой данные содержат накапливающиеся со временем ошибки, вследствие чего действительная траектория движения УО будет существенно отличаться от программно заданной.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ определения параметров движущихся объектов, включающий вычисление ускорения силы тяжести g по математическим зависимостям, например, по формуле

где f - постоянная всемирного тяготения;
М - масса Земли;
r=RЭ+Н - радиус-вектор;
RЭ=6378.165 км - экваториальный радиус Земли;
Н - высота полета;
 - коэффициент, имеющий размерность массы;
- коэффициент, имеющий размерность массы;
А - момент инерции относительно оси, лежащей в экваториальной плоскости;
В - момент инерции относительно оси, совпадающей с осью вращения Земли, эти моменты характеризуют влияние несферичности Земли на распределение масс;
ϕГЦ - геоцентрическая широта положения ЛА;
 - безразмерный параметр фигуры Земли, равный отношению центробежной силы к величине ускорения силы тяжести в плоскости экватора (по расчетам μ=0.001 M; q=0.003468);
- безразмерный параметр фигуры Земли, равный отношению центробежной силы к величине ускорения силы тяжести в плоскости экватора (по расчетам μ=0.001 M; q=0.003468);
Ω - угловая скорость вращения Земли.
Далее измеряют с помощью акселерометров кажущееся ускорение, которое создается силами тяги и аэродинамическими силами (см. Дмитриевский А.А. Внешняя баллистика. - М.: Машиностроение, 1991 г. - 398 с., с.42). Данный способ принят за прототип.
Причина, препятствующая достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, заключается в возрастании ошибки вычисления текущих навигационных параметров во времени. Это обусловлено тем, что при определении высоты по формуле (2) необходима информация об ускорении силы тяжести, при этом g, как видно из формулы (1), является функцией высоты, следовательно, образуется положительная обратная связь.
где Н0, Vу0 - начальные значения высоты и вертикальной составляющей скорости полета.
Так как управление движением БЛА осуществляется на протяжении всего полета, то применение данного способа приведет к недопустимо большим погрешностям определения навигационных параметров БЛА. Еще одним недостатком является необходимость использования дополнительной навигационной системы, которая определяет широту местонахождения БЛА, что усложняет реализацию способа.
Признаки прототипа, являющиеся общими с заявляемым изобретением, включают измерение кажущегося ускорения при помощи акселерометров; определение ускорения силы тяжести.
Раскрытие изобретения.
Задачей изобретения является повышение точности определения навигационных параметров беспилотного летательного аппарата вертикального канала в режиме планирования и упрощение способа инерциального наведения.
Поставленная задача была решена за счет того, что в известном способе, включающем измерение кажущегося ускорения при помощи акселерометров и определение ускорения силы тяжести, ускорение силы тяжести определяют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения, при этом управляют величиной изменения подъемной силы на основе регулирования угла атаки α согласно следующей зависимости:
α=-КV·VY,
где КV - коэффициент пропорциональности,
VY - вертикальная составляющая вектора скорости планирования беспилотного летательного аппарата.
Отличием предлагаемого способа от прототипа является то, что ускорение силы тяжести определяют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения, при этом управляют величиной изменения подъемной силы на основе регулирования угла атаки α согласно описанной выше зависимости. Отличительные признаки в совокупности с известными позволяют повысить точность определения навигационных параметров беспилотного летательного аппарата вертикального канала в режиме планирования, а также упростить способ инерциального наведения.
Краткое описание чертежей.
На чертеже представлена схема сил, действующих на БЛА в полете.
Осуществление изобретения.
Способ инерциального наведения БЛА осуществляют следующим образом.
Запишем уравнение движения БЛА в нормальной системе координат относительно оси Y согласно чертежу

где m - масса летательного аппарата;
 - вертикальное ускорение;
- вертикальное ускорение;
RY - вертикальная составляющая подъемной силы;
QY - вертикальная составляющая силы лобового сопротивления;
 - центробежная сила;
- центробежная сила;
G - сила тяжести.
Считаем, что летательный аппарат совершает полет в режиме планирования, который широко используется для различных типов БЛА.
При реализации режима планирования необходимо обеспечить выполнение условия θ≅const или VY≅const, что следует из выражения для угла наклона вектора скорости:
где VY, VX - вертикальная и горизонтальная составляющие вектора скорости.
Постоянство вертикальной составляющей вектора скорости возможно при равенстве нулю вертикального ускорения . При учете данного условия и малости значений QY и FЦ уравнение движения БЛА (3) примет вид:

Чтобы обеспечить выполнение данного равенства следует управлять величиной подъемной силы, что может быть достигнуто путем регулирования угла атаки α, который образуется продольной осью летательного аппарата X1 и вектором скорости V. Закон управления, обеспечивающий реализацию режима планирования можно представить в виде:

где КV - коэффициент пропорциональности.
С учетом всех допущений и того, что для реализации режима планирования необходимо выполнение условия  уравнение (3) преобразуем к виду:
уравнение (3) преобразуем к виду:

где  - вертикальная составляющая кажущегося ускорения.
- вертикальная составляющая кажущегося ускорения.
Зная g, можно вычислить действительные параметры движения управляемого объекта по известным зависимостям:
Таким образом, реализация данного способа позволяет упростить процедуру определения ускорения силы тяжести и ликвидировать положительную обратную связь, в результате этого погрешности, которые характерны для способа-прототипа, исключаются, следовательно, повышается точность определения навигационных параметров движения БЛА, что обеспечивает повышение точности управления движением БЛА.
Для осуществления предлагаемого способа было проведено моделирование полета летательного аппарата. Сравнение предлагаемого способа и способа-прототипа, осуществлялось при прочих равных условиях. Результаты моделирования приведены в таблице, где t - время полета; Н - действительное значение высоты полета; H1 - значение высоты полета при определении ускорения силы тяжести предлагаемым способом; H2 - значение высоты полета при определении ускорения силы тяжести способом-прототипом; ΔH1=Н=Н1 - отклонение значения H1 от действительного значения и ΔH2=Н-Н2 - отклонение значения H2 от действительного значения.
Как видно из таблицы, точность определения высоты полета при определении ускорения силы тяжести предложенным способом существенно выше, чем при вычислении ускорения силы тяжести способом, описанным в прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В РЕЖИМЕ РИКОШЕТИРОВАНИЯ | 2007 |
|
RU2343529C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403184C1 |
| Способ сокращения потерь скорости и времени при осуществлении маневра заданной конфигурации беспилотным летательным аппаратом планирующего типа | 2016 |
|
RU2623361C1 |
| Способ управления беспилотным планирующим летательным аппаратом | 2017 |
|
RU2654238C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Способ управления беспилотным планирующим летательным аппаратом на траекториях с изменениями направлений движения в заданных опорных точках | 2019 |
|
RU2708412C1 |
Изобретение относится к области приборостроения и может быть использовано в системах управления летательными аппаратами. Технический результат - повышение точности. Для достижения данного результата ускорение силы тяжести определяют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения. При этом управляют величиной изменения подъемной силы на основе регулирования угла атаки согласно линейной зависимости от вертикальной составляющей вектора скорости планирования. 1 ил.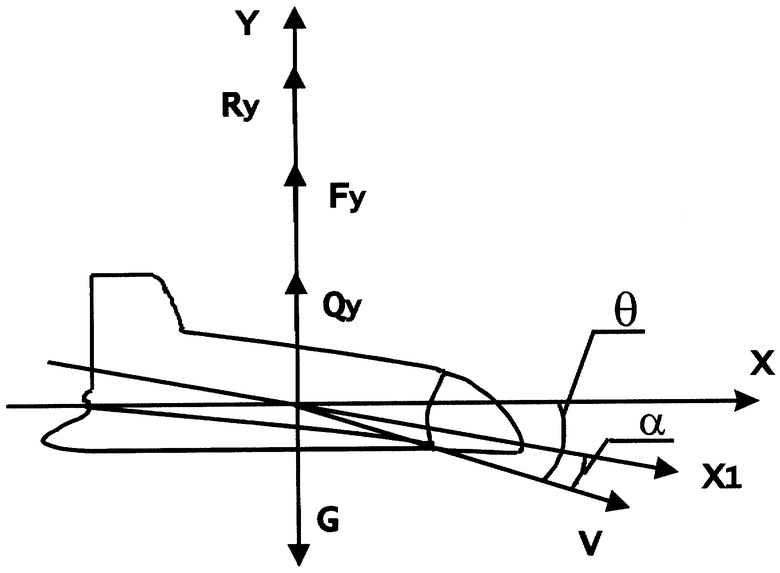
Способ наведения беспилотного летательного аппарата в режиме планирования, включающий измерение кажущегося ускорения при помощи акселерометров и определение ускорения силы тяжести, отличающийся тем, что ускорение силы тяжести определяют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения, при этом управляют величиной изменения подъемной силы на основе регулирования угла атаки (α) согласно следующей зависимости:
α=-KV·VY,
где KV - коэффициент пропорциональности;
VY - вертикальная составляющая вектора скорости планирования беспилотного летательного аппарата.
| Дмитриевский А.А | |||
| Внешняя баллистика | |||
| - М.: Машиностроение, 1991, 398 с., с.42 | |||
| Максимов М.В., Горгонов Г.И | |||
| Радиоуправление ракетами | |||
| - М.: Сов | |||
| радио, 1964, с.518-521, рис.10.4 | |||
| US 5987371 А, 16.11.1999 | |||
| СПОСОБ ПРОИЗВОДСТВА УГЛЕВОДСОДЕРЖАЩЕГО ЖЕЛИРУЮЩЕГО КОНЦЕНТРАТА ДЛЯ КОНДИТЕРСКИХ ИЗДЕЛИЙ | 2003 |
|
RU2260304C2 |
| US 5260874 A, 09.11.1993. | |||

