Область техники, к которой относится изобретение
Изобретение относится к авиационной технике, в частности к авиационному приборостроению, и может быть использовано совместно с системами управления летательными аппаратами, в частности на беспилотных летательных аппаратах и планерах.
Уровень техники
Известен способ наведения беспилотного летательного аппарата в режиме планирования, по которому измерение кажущегося ускорения при помощи акселерометров и определение ускорения силы тяжести осуществляют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения, при этом управляют величиной изменения подъемной силы на основе регулирования угла атаки согласно зависимости (Патент RU 2286590, 16.12.2003).
Но известный способ не позволяет управлять подъемной силой на основе использования энергии внешних источников.
Известен автоматический беспилотный комплекс, который содержит дистанционно пилотируемый летательный аппарат (ДПЛА), включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему (ИНС), приемную аппаратуру спутниковой навигационной системы (СНС), систему воздушно-скоростных сигналов и радиовысотомер малых высот, систему автоматического дистанционного управления полетом ДПЛА и работой его систем, включающую систему командного радиоуправления, обзорную телевизионную систему, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему обеспечения посадки с устройством торможения основных колес шасси, мобильный наземный пункт управления с устройствами связи и контроля, и в его состав введены система диагностики состояния магистральных трубопроводов с блоком управления системой диагностики, размещенные в фюзеляже ДПЛА, введен подключенный к ИНС и приемной аппаратуре СНС вычислитель действительных координат, причем вычислитель действительных координат и первый вход-выход блока управления системой диагностики подключены к блоку управления бортовыми системами, второй вход-выход подключен к системе диагностики состояния газопровода, третий вход-выход связан с системой командного радиоуправления (Заявка RU 2000132523, 26.12.2000). Но известное устройство не позволяет ДПЛА находиться в воздухе продолжительное время.
Также известен беспилотный летательный аппарат (БЛА), включающий планер, силовую установку с поршневым двигателем, систему автоматического управления, лидар и т.д., использующий энергию конвективных структур атмосферы (термиков). Лидар обнаруживает термик и направляет БЛА в его сторону. При достижении термика автоматическая система управления БЛА проводит набор высоты ЛА по спирали на максимальную высоту, обеспечиваемую данным термиком, и далее ЛА планирует до очередного термика, если позволяет аэродинамическое качество ЛА, или включает двигатель. Предлагаемая система позволяет увеличить продолжительность полета БЛА за счет экономии топлива во время планирующих полетов (Заявка US 2007/0252035 А1, 01.11.2007).
Данное решение также не позволяет ДПЛА находиться в воздухе продолжительное время, так как термики возникают только в дневное время. Кроме того, для использования только планирующего полета между термиками необходимо очень высокое аэродинамическое качество крыла планера (около 80-100). Последнее связано с тем, как показывает практика полетов планеристов, что расстояние между термиками составляет 15-18 км. При использовании ЛА с более низким аэродинамическим качеством необходим двигатель. Однако конвективные структуры не ограничиваются только термиками. Как показывают полеты планеристов, на малых высотах (около 200-400 м) также возможен набор высоты и продолжительное парение. На этих высотах конвективные структуры не такие большие по высоте и встречаются значительно чаще. Как показывают последние исследования в области гидродинамики и физики атмосферы, эти конвективные структуры с характерным размером около 300 м и имеющие форму тора локализованы в отдельных областях пространства (в данном случае в нижней части пограничного слоя атмосферы) и образуют упорядоченные структуры (типа гексагональных решеток с периодом решетки около 2 км). Конвективные структуры этого типа (торы) получили название автоструктур. Использование их при полетах на малых высотах (от 150 до 400 м) позволяет при сравнительно невысоком аэродинамическом качестве крыла (около 20) увеличить продолжительность полета БЛА.
Раскрытие изобретения
Задачами, решаемыми предлагаемым изобретением, являются увеличение продолжительности безмоторного полета беспилотных летательных аппаратов и планеров путем компенсации потерь высоты за счет использования энергии конвективных структур атмосферного пограничного слоя, экономия внутренних энергоресурсов беспилотного летательного аппарата.
Технический результат заключается в наведении беспилотного летательного аппарата на конвективную структуру атмосферного пограничного слоя без участия оператора и в увеличении подъемной силы беспилотного летательного аппарата на основе использования дополнительной подъемной силы, создаваемой конвективными структурами атмосферного пограничного слоя.
Технический результат достигается тем, что управляют величиной изменения подъемной силы беспилотного летательного аппарата на основе использования дополнительной подъемной силы, создаваемой конвективными структурами атмосферного пограничного слоя, при этом беспилотный летательный аппарат сначала поднимают в воздух при помощи установленного на нем двигателя, затем выполняют поиск и определение местоположения конвективной структуры атмосферного пограничного слоя, далее осуществляют вход в указанную конвективную структуру, подъем в ней за счет восходящего конвективного потока и выход с поиском очередной конвективной структуры атмосферного пограничного слоя в режиме планирования; подъем беспилотного летательного аппарата на первоначальном этапе осуществляют до высоты не более 400 метров с последующим выключением двигателя после входа в конвективную структуру; поиск и определение местоположения конвективной структуры атмосферного пограничного слоя выполняют с измерением и ограничением высоты движения, вертикальной скорости, угла тангажа и крена беспилотного летательного аппарата и с предотвращением срыва в штопор посредством его комплекса наведения; вход в указанную конвективную структуру определяют по изменению угла крена и увеличению вертикальной скорости беспилотного летательного аппарата; вход в указанную конвективную структуру осуществляют на глубину до момента достижения заданной вертикальной скорости подъема беспилотным летательным аппаратом; выход из указанной конвективной структуры осуществляют при уменьшении и в момент достижения вертикальной скорости подъема минимального значения; поиски определение местоположения конвективной структуры атмосферного пограничного слоя выполняют в режиме планирования беспилотного летательного аппарата с отключенным двигателем; поиск очередной конвективной структуры атмосферного пограничного слоя выполняют по зигзагообразной линии в горизонтальной плоскости траектории с длиной стороны зигзага, не превышающей 2000 метров, используя устройство для осуществления способа; в устройство для осуществления способа, включающее корпус, консоли крыла летательного аппарата, автоматическую систему управления и стабилизации, группу рулевых устройств, связанных с автоматической системой управления и стабилизации и с корпусом летательного аппарата, высотомер и источник электропитания, расположенные в корпусе летательного аппарата, включены группа компараторов, связанных с рулевыми устройствами, высотомером, группа акселерометров, связанных с группой компараторов, группа интеграторов, связанных с группой компараторов, и таймер, связанный с рулевым устройством и компаратором; в нем источником электропитания является как минимум одна аккумуляторная батарея электропитания группы рулевых устройств, автоматической системы управления и стабилизации, группы компараторов, группы акселерометров и группы интеграторов; в него дополнительно включен электрогенератор электропитания рулевых устройств, автоматической системой управления и стабилизации, группы компараторов, группы акселерометров, группы интеграторов; в него дополнительно включен электрогенератор с приводом от набегающего воздушного потока; в него включена группа компараторов, содержащая первый компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения прекращения набора высоты и выполнения разворота; в него включена группа компараторов, содержащая второй и третий компараторы, выполненные с возможностью подачи сигнала на рулевое устройство для обеспечения выполнения разворота на обнаруженную конвективную структуру атмосферного пограничного слоя; в него включена группа компараторов, содержащая четвертый компаратор, выполненный с возможностью подачи управляющего сигнала на рулевое устройство для обеспечения выполнения разворота на обнаруженную конвективную структуру атмосферного пограничного слоя; в него включена группа компараторов, содержащая пятый компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения выполнения движения вглубь обнаруженной конвективной структуры атмосферного пограничного слоя; в него включена группа компараторов, содержащая шестой компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения выхода из конвективной структуры атмосферного пограничного слоя; в него включена группа компараторов, содержащая седьмой компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения управления по углу тангажа; в него включена группа компараторов, содержащая восьмой компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения разворота при поиске конвективной структуры атмосферного пограничного слоя; в него включена группа акселерометров, содержащая первый акселерометр, характеризующий силу воздействия конвективной структуры атмосферного пограничного слоя и расположенный на концевой части одной из консолей крыла летательного аппарата; в него включена группа акселерометров, содержащая второй акселерометр, характеризующий силу воздействия конвективной структуры атмосферного пограничного слоя и расположенный в центре тяжести летательного аппарата; в него включена группа акселерометров, содержащая третий акселерометр, характеризующий силу воздействия конвективной структуры атмосферного пограничного слоя и расположенный в хвостовой части корпуса летательного аппарата; в него включена группа интеграторов, содержащая первый интегратор, связанный с вторым акселерометром с одной стороны, с пятым компаратором с другой стороны и с шестым компаратором с третьей стороны; в него включена группа интеграторов, содержащая второй и третий интеграторы, связанные между собой с одной стороны, и при этом второй интегратор связан с третьим акселерометром, а третий интегратор связан с седьмым компаратором с другой стороны.
Краткое описание чертежей
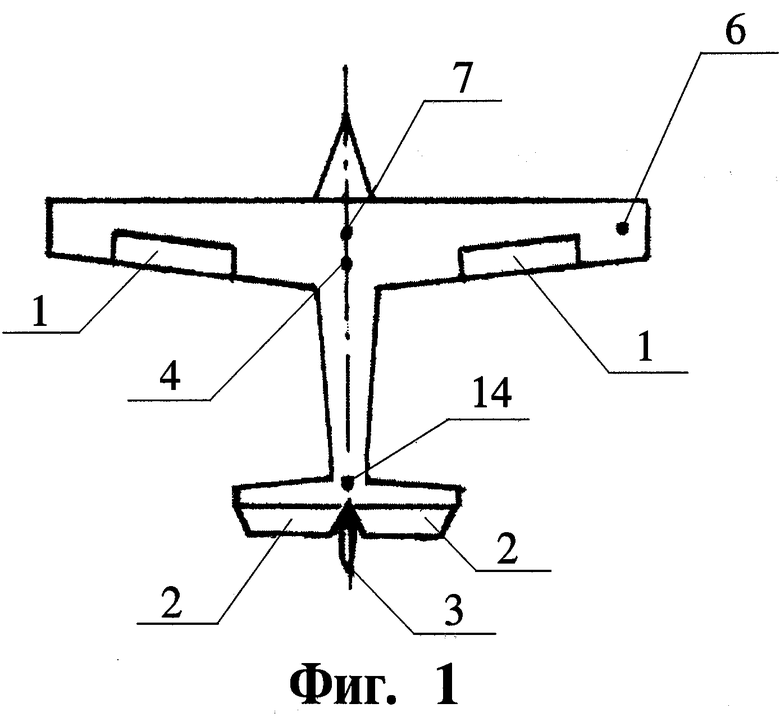
На фиг.1 представлен схематичный вид беспилотного летательного аппарата с точками расположения акселерометров и рулевых устройств.
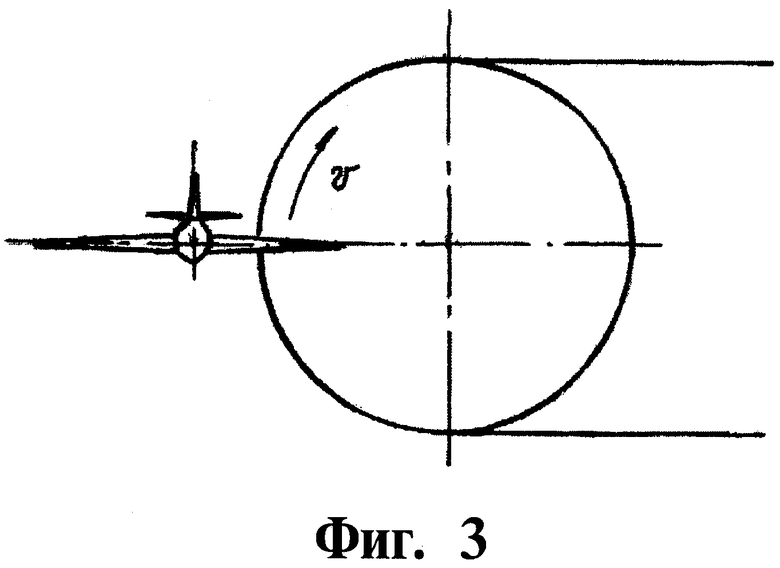
На фиг.2 представлена общая схема устройства для осуществления способа увеличения продолжительности полета беспилотного летательного аппарата.
На фиг.3 представлен вид беспилотного летательного аппарата в месте обнаружения конвективной структуры атмосферного пограничного слоя.
Осуществление изобретения
Устройство для осуществления способа увеличения продолжительности полета беспилотного летательного аппарата содержит корпус, с которым соединены консоли крыла летательного аппарата. В корпусе размещена автоматическая система управления и стабилизации 0. Рули группы рулевых устройств 1, 2 и 3 расположены на консолях крыла и в хвостовой части корпуса. Группа рулевых устройств 1, 2 и 3 связана с автоматической системой управления и стабилизации 0 и с корпусом летательного аппарата. Высотомер 4 и источник электропитания расположены в корпусе летательного аппарата. В устройство включены группа компараторов, в которой компаратор 5 связан с одной стороны с рулевыми устройствами 2 и 3, а с другой стороны с высотомером 4. Акселерометры 6 и 7 связаны с компараторами 8, 9 и 10, включенными в устройство. Интегратор 11 связан с одной стороны с акселерометром 7, а с другой стороны - с компаратором 12 и 13. Акселерометр 14 связан с интегратором 15, который соединен с интегратором 16. Компаратор 17 связан с одной стороны с рулевым устройством 2, а с другой - с интегратором 16. Таймер 18 связан с одной стороны с компаратором 13 и 10, а с другой - с компаратором 19, связанным с рулевым устройством 3.
Способ увеличения продолжительности полета беспилотного летательного аппарата и устройство для его осуществления работают следующим образом.
Сначала беспилотный летательный аппарат, оборудованный устройством для осуществления способа увеличения продолжительности полета беспилотного летательного аппарата, с помощью оператора производит взлет, набор высоты 300 метров и перевод в горизонтальный полет на работающем двигателе.
Затем, после первоначального обнаружения конвективной структуры атмосферного пограничного слоя и входа в нее, по сигналу с компаратора 9 двигатель отключается и беспилотный летательный аппарат выполняет дальнейший полет в указанной конвективной структуре под ее воздействием с набором высоты в автономном режиме с отключенным двигателем. Для подзарядки аккумуляторных батарей электропитания предусмотрен электрогенератор, приводимый в действие набегающим потоком.
В связи с необходимостью ограничения максимальной высоты подъема летательного аппарата в конвективной структуре до высоты не более 400 метров и предупреждения выхода его за пределы конвективной структуры в комплекс включены бортовой высотомер 4 и компаратор 5. При достижении высоты полета летательным аппаратом 400 метров с компаратора 5 подается сигнал на рулевое устройство 3 для выхода из первоначальной конвективной структуры.
Для определения положения конвективной структуры атмосферного пограничного слоя относительно продольной оси беспилотного летательного аппарата комплекс имеет три акселерометра: акселерометр 6 - на концевой части одной из консолей крыла, акселерометр 7 - в центре тяжести и акселерометр 14 - в хвостовой части корпуса летательного аппарата.
Обнаружение конвективной структуры происходит с помощью двух компараторов 8 и 9 по сигналам, полученным с акселерометров 6 и 7. Если сигнал идет с компаратора 9, конвективная структура находится слева и рулевое устройство 3 разворачивает летательный аппарат влево для входа в нее. При отсутствии сигнала с компараторов 8 и 9, но при фиксации ускорения воздействующей подъемной силы конвективной структуры на акселерометре 7 больше нуля компаратором 10 подается сигнал на рулевое устройство 3 для доворота летательного аппарата влево или вправо. Если на акселерометре 7 отсутствует воздействие подъемной силы конвективной структуры и ускорение равно нулю, компаратор 10 тоже выдает нулевой сигнал и полет летательного аппарата осуществляется в заданном направлении.
После входа летательного аппарата в конвективную структуру для обеспечения максимального набора в ней высоты определяется предельная глубина входа. При этом сигнал с акселерометра 7 поступает на интегратор 11. Предельная глубина входа определяется заданной вертикальной скоростью подъема с помощью компаратора 12. В случае когда компаратор 12 выдает нулевой сигнал относительно заданной вертикальной скорости подъема, движение летательного аппарата продолжается по касательной к конвективной структуре. Если вертикальная скорость подъема падает до минимального значения, выполняется выход из конвективной структуры.
Для предотвращения срыва в штопор в конвективной структуре атмосферного пограничного слоя на летательном аппарате предусмотрено ограничение угла тангажа, при котором сигнал с акселерометра 14 интегрируется дважды с помощью интеграторов 15 и 16. Полученный сигнал о перемещении хвостовой части корпуса летательного аппарата сравнивается с предельно допустимым значением на компараторе 17. В случае его превышения подается сигнал на рулевое устройство 2 для уменьшения угла тангажа.
Выход из конвективной структуры выполняется по сигналу с компаратора 13, и при этом запускается таймер 18.
Для обеспечения перехода (поиска и обнаружения) к очередной конвективной структуре атмосферного пограничного слоя летательный аппарат выполняет полет в режиме планирования по зигзагообразной линии в горизонтальной плоскости траектории с длиной стороны зигзага, не превышающей 2000 метров, которая определяется периодом времени полета, установленным на таймере 18. Если за установленный период времени очередная конвективная структура не обнаружена, с компаратора 19 подается сигнал на разворот влево или вправо с помощью рулевых устройств 1 и 3 для выполнения дальнейшего поиска по зигзагу.
Таким образом, предлагаемое изобретение по сравнению с аналогами позволяет навести беспилотный летательный аппарат на конвективную структуру атмосферного пограничного слоя без участия оператора и увеличить подъемную силу беспилотного летательного аппарата на основе использования дополнительной подъемной силы, создаваемой конвективными структурами атмосферного пограничного слоя, вследствие чего увеличивается продолжительность безмоторного полета беспилотных летательных аппаратов и планеров путем компенсации потерь высоты за счет использования энергии конвективных структур атмосферного пограничного слоя, экономия внутренних энергоресурсов беспилотного летательного аппарата, что может быть использовано с экономической пользой в различных отраслях экономики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2290346C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| БЕСПИЛОТНЫЙ ПРИВЯЗНОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2018 |
|
RU2683133C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| БЕСПИЛОТНОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА ФУТБОЛЬНЫХ ФАНАТИКОВ С ФАЙЕРАМИ | 2022 |
|
RU2809665C2 |
| БЕСПИЛОТНОЕ АВИАЦИОННОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОИСКА ЛЮДЕЙ, ТЕРПЯЩИХ ИЛИ ПОТЕРПЕВШИХ БЕДСТВИЕ НА МОРЕ | 2022 |
|
RU2814981C2 |
| СПОСОБ ИЗМЕНЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2274585C2 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| СПОСОБ ИЗМЕНЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383469C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОРОННЫХ РАЗРЯДОВ | 2015 |
|
RU2612937C1 |
Изобретение относится к авиационной технике и может быть использовано в системах управления беспилотными летательными аппаратами и планерами. Способ увеличения продолжительности полета беспилотного летательного аппарата заключается в том, что управляют величиной изменения подъемной силы с помощью использования дополнительной подъемной силы, создаваемой конвективными структурами атмосферного пограничного слоя. Беспилотный летательный аппарат сначала поднимают в воздух при помощи установленного на нем двигателя, затем выполняют поиск и определение местоположения конвективной структуры атмосферного пограничного слоя, далее осуществляют вход в указанную конвективную структуру, подъем в ней за счет восходящего конвективного потока и выход с поиском очередной конвективной структуры атмосферного пограничного слоя в режиме планирования. Устройство для осуществления способа содержит автоматическую систему управления и стабилизации, связанную с ней группу рулевых устройств и источник электропитания, расположенные в корпусе летательного аппарата. Также включены группа компараторов, связанных с рулевыми устройствами, высотомером, группа акселерометров, группа интеграторов и таймер. Достигается увеличение продолжительности полета, экономия внутренних энергоресурсов беспилотного летательного аппарата. 2 н. и 22 з.п ф-лы, 3 ил.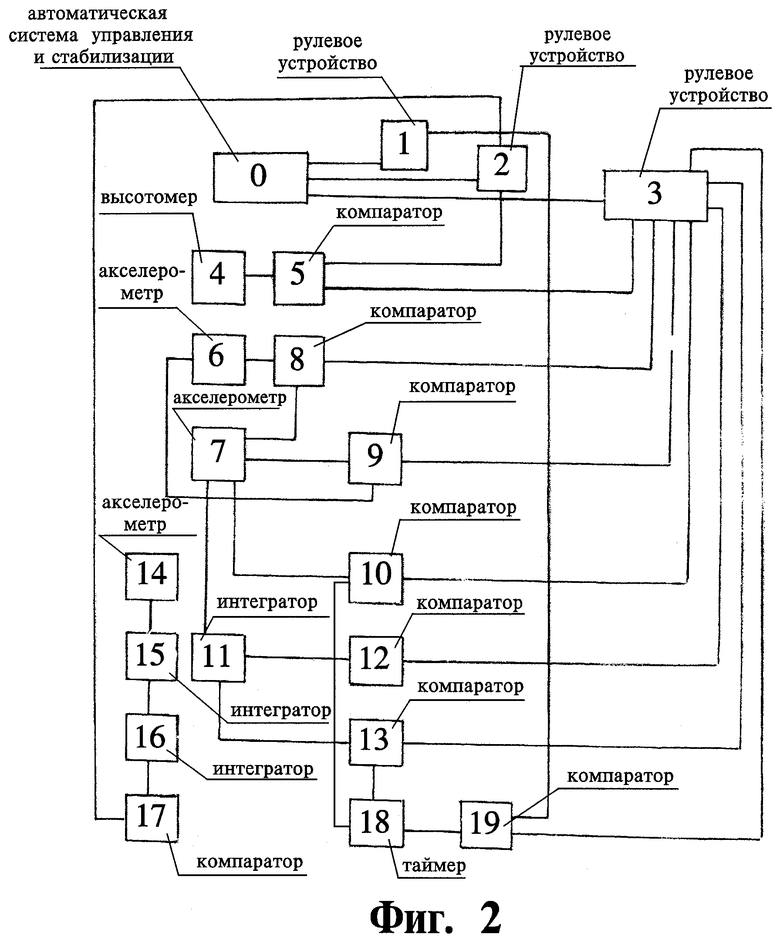
1. Способ увеличения продолжительности полета беспилотного летательного аппарата, включающий управление величиной изменения подъемной силы летательного аппарата на основе использования дополнительной подъемной силы, создаваемой конвективными структурами атмосферного пограничного слоя, выполнение поиска и определение местоположения конвективной структуры, с последующим осуществлением входа летательного аппарата в указанную конвективную структуру, подъема в ней за счет восходящего конвективного потока и выходом с поиском очередной конвективной структуры в режиме планирования, отличающийся тем, что поиск и определение местоположения конвективной структуры выполняют с измерением и ограничением высоты полета, вертикальной скорости, угла тангажа и крена беспилотного летательного аппарата и с предотвращением срыва в штопор посредством его комплекса наведения.
2. Способ по п.1, отличающийся тем, что подъем летательного аппарата на первоначальном этапе осуществляют до высоты не более 400 м с последующим выключением двигателя после входа в конвективную структуру.
3. Способ по п.1, отличающийся тем, что вход в указанную конвективную структуру определяют по изменению угла крена и увеличению вертикальной скорости подъема летательного аппарата.
4. Способ по п.1, отличающийся тем, что вход в указанную конвективную структуру осуществляют до момента достижения заданной вертикальной скорости подъема летательным аппаратом.
5. Способ по п.1, отличающийся тем, что выход из указанной конвективной структуры осуществляют при уменьшении и в момент достижения вертикальной скоростью подъема минимального значения.
6. Способ по пп.1 и 2, отличающийся тем, что поиск и определение местоположения конвективной структуры выполняют в режиме планирования летательного аппарата с отключенным двигателем.
7. Способ по п.1, отличающийся тем, что поиск очередной конвективной структуры выполняют посредством автоматической системы управления и стабилизации, группы рулевых устройств, связанных с автоматической системой управления и стабилизации, высотомера, группы компараторов, связанных с группой рулевых устройств и высотомером, группы акселерометров, связанных с группой компараторов, группы интеграторов, связанных с группой компараторов, и таймера, связанного с группой рулевых устройств и компараторов.
8. Способ по п.1, отличающийся тем, что поиск очередной конвективной структуры выполняют по зигзагообразной линии в горизонтальной плоскости траектории с длиной стороны зигзага, не превышающей 2000 м.
9. Устройство для осуществления способа по п.1, характеризующееся установкой на корпус и консоли крыльев летательного аппарата и включающее автоматическую систему управления и стабилизации, группу рулевых устройств, связанных с автоматической системой управления и стабилизации и с корпусом летательного аппарата, высотомер и источник электропитания, расположенные в корпусе летательного аппарата, отличающееся тем, что в него включена группа компараторов, связанных с рулевыми устройствами и высотомером, группа акселерометров, связанных с группой компараторов, группа интеграторов, связанных с группой компараторов, и таймер, связанный с группой рулевых устройств и компараторов.
10. Устройство по п.9, отличающееся тем, что в нем источником электропитания является, по меньшей мере, одна аккумуляторная батарея электропитания группы рулевых устройств, автоматической системы управления и стабилизации, группы компараторов, группы акселерометров и группы интеграторов.
11. Устройство по п.9, отличающееся тем, что в него дополнительно включен электрогенератор электропитания группы рулевых устройств, автоматической системы управления и стабилизации, группы компараторов, группы акселерометров, группы интеграторов.
12. Устройство по п.9, отличающееся тем, что в него дополнительно включен электрогенератор с приводом от набегающего воздушного потока.
13. Устройство по п.9, отличающееся тем, что в него включена группа компараторов, содержащая первый компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения прекращения набора высоты и выполнения разворота.
14. Устройство по п.9, отличающееся тем, что в него включена группа компараторов, содержащая второй и третий компараторы, выполненные с возможностью подачи сигнала на рулевое устройство для обеспечения выполнения разворота на обнаруженную конвективную структуру.
15. Устройство по п.9, отличающееся тем, что в него включена группа компараторов, содержащая четвертый компаратор, выполненный с возможностью подачи управляющего сигнала на рулевое устройство для обеспечения выполнения разворота на обнаруженную конвективную структуру.
16. Устройство по п.9, отличающееся тем, что в него включена группа компараторов, содержащая пятый компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения выполнения движения в обнаруженную конвективную структуру.
17. Устройство по п.9, отличающееся тем, что в него включена группа компараторов, содержащая шестой компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения выхода из конвективной структуры.
18. Устройство по п.9, отличающееся тем, что в него включена группа компараторов, содержащая седьмой компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения управления по углу тангажа.
19. Устройство по п.9, отличающееся тем, что в него включена группа компараторов, содержащая восьмой компаратор, выполненный с возможностью подачи сигнала на рулевое устройство для обеспечения разворота при поиске конвективной структуры.
20. Устройство по п.9, отличающееся тем, что в него включена группа акселерометров, содержащая первый акселерометр, характеризующий силу воздействия конвективной структуры и расположенный на концевой части одной из консолей крыла летательного аппарата.
21. Устройство по п.9, отличающееся тем, что в него включена группа акселерометров, содержащая второй акселерометр, характеризующий силу воздействия конвективной структуры и расположенный в центре тяжести летательного аппарата.
22. Устройство по п.9, отличающееся тем, что в него включена группа акселерометров, содержащая третий акселерометр, характеризующий силу воздействия конвективной структуры и расположенный в хвостовой части корпуса летательного аппарата.
23. Устройство по пп.15, 16 и 20, отличающееся тем, что в него включена группа интеграторов, содержащая первый интегратор, связанный с вторым акселерометром с одной стороны, с пятым компаратором с другой стороны и с шестым компаратором с третьей стороны.
24. Устройство по пп.17 и 21, отличающееся тем, что в него включена группа интеграторов, содержащая второй и третий интеграторы, связанные между собой с одной стороны, и при этом второй интегратор связан с третьим акселерометром, а третий интегратор связан с седьмым компаратором с другой стороны.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| JP 2007245797 A, 27.09.2007 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 1990 |
|
SU1795622A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

