Изобретение относится к способам определения навигационных параметров движения крылатых беспилотных летательных аппаратов (БЛА) и может быть использовано при управлении БЛА, совершающего полет в режиме рикошетирования.
Известен способ управления полетом, который реализован в известной системе управления. В данной системе измеряют и формируют управляющее воздействие на управляющие органы с целью изменения траектории. В качестве измерителя координат управляемого объекта (УО) используется система инерциальной навигации (см. Справочник по радиоэлектронике, том 3, под общей ред. проф., д.т.н. А.А.Куликовского. - М.: Энергия, 1970 г.- 816 с., с.557).
Причина, препятствующая достижению указанного ниже технического результата при использовании известного способа, заключается в том, что вырабатываемые инерциальной системой данные содержат накапливающиеся со временем ошибки, вследствие чего действительная траектория движения УО будет существенно отличаться от программно заданной.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ управления полетом, где при определении параметров движения ускорение силы тяжести g вычисляется по математическим зависимостям, например по формуле

где f - постоянная всемирного тяготения;
М - масса Земли;
r=RЭ+H - радиус-вектор;
RЭ=6378.165 км - экваториальный радиус Земли;
Н - высота полета;
 - коэффициент, имеющий размерность массы;
- коэффициент, имеющий размерность массы;
А - момент инерции относительно оси, лежащей в экваториальной плоскости;
В - момент инерции относительно оси, совпадающей с осью вращения Земли, эти моменты характеризуют влияние несферичности Земли на распределение масс;
ϕгц - геоцентрическая широта положения ЛА;
 - безразмерный параметр фигуры Земли, равный отношению центробежной силы к величине ускорения силы тяжести в плоскости экватора (по расчетам μ=0.001М; q=0.003468);
- безразмерный параметр фигуры Земли, равный отношению центробежной силы к величине ускорения силы тяжести в плоскости экватора (по расчетам μ=0.001М; q=0.003468);
Ω - угловая скорость вращения Земли.
Далее измеряют с помощью акселерометров кажущееся ускорение, которое создается силами тяги и аэродинамическими силами (см. Внешняя баллистика, А.А.Дмитриевского, - М.: Машиностроение, 1991 г.- 398 с., с.42). Данный способ принят за прототип.
Причина, препятствующая достижению указанного ниже технического результата при использовании известного способа, заключается в возрастании ошибки вычисления текущих навигационных параметров во времени. Это обусловлено тем, что при определении высоты по формуле (2) необходима информация об ускорении силы тяжести, при этом g, как видно из формулы (1), является функцией высоты, следовательно, образуется положительная обратная связь.
где Н0, Vy0 - начальные значения высоты и вертикальной составляющей скорости полета.
Так как управление движением БЛА осуществляется на протяжении всего полета, то применение данного способа приведет к недопустимо большим погрешностям определения навигационных параметров БЛА. Еще одним недостатком является необходимость использования дополнительной навигационной системы, которая должна определять широту местонахождения БЛА, что усложняет реализацию способа.
Признаки прототипа, являющиеся общими с заявляемым изобретением - измерение кажущегося ускорения при помощи акселерометров; определение ускорения силы тяжести.
Задачей изобретения является повышение точности определения навигационных параметров беспилотного летательного аппарата в вертикальной плоскости при движении в режиме рикошетирования и упрощение способа инерциального наведения.
Поставленная задача была решена за счет того, что в известном способе, включающем измерение составляющих кажущегося ускорения при помощи акселерометров и определение ускорения силы тяжести, ускорение силы тяжести определяют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения в моменты времени, когда производная по кажущемуся ускорению принимает значение равное нулю, согласно формуле:
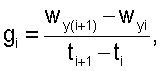
где wyi, wy(i+1) - значения кажущейся скорости БЛА;
ti(i=1, 2, 3...), ti+1 - моменты времени, когда функция обращается в нуль.
Отличием предлагаемого способа от прототипа является то, что ускорение силы тяжести при движении БЛА в режиме рикошетирования определяют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения в моменты времени, когда производная по кажущемуся ускорению принимает значение равное нулю. Отличительные признаки в совокупности с известными позволяют упростить способ наведения беспилотного летательного аппарата в режиме рикошетирования и повысить точность его движения в вертикальной плоскости.
На чертеже представлена траектория полета БЛА в режиме рикошетирования.
Способ наведения БЛА в режиме рикошетирования осуществляют следующим образом.
Режим рикошетирования представляет собой колебательное движение в вертикальной плоскости относительно некоторой базовой траектории, имеющей вид прямой линии. Данный режим может быть использован как маневр летательного аппарата в вертикальной плоскости, что может найти применение как в военной (например, преодоление противоракетной обороны), так и в гражданских областях.
Управление полетом осуществляется путем регулирования углом атаки а, закон управления движением БЛА имеет следующий вид:
Представим зависимость для определения вертикальной составляющей кажущейся скорости БЛА
где νy - вертикальная составляющая вектора скорости;
g - ускорение силы тяжести.
В данном уравнении (4) два неизвестных: νy и g. Если исключить νy, то можно будет вычислить значение g. Рассмотрим данный вопрос подробнее. Запишем зависимость для высоты полета БЛА:

где Н0 - начальная высота полета;
νyc - постоянная составляющая вертикальной скорости;
ΔH - амплитуда переменной составляющей высоты полета;
ωp - частота рикошета.
Продифференцируем данное уравнение, получим зависимость для определения νy

Анализируя (6), можно отметить, что в момент времени, когда cosωpt=0,
Задача состоит в нахождении некоторой математической функции, с помощью которой можно будет определить данный момент времени. Из выражения (6) определим зависимости для 


Примем во внимание, что выражение для кажущегося ускорения имеет следующий вид:
где 
 g0 - начальное значение ускорения силы тяжести;
g0 - начальное значение ускорения силы тяжести;
 - постоянная составляющая скорости изменения ускорения силы тяжести;
- постоянная составляющая скорости изменения ускорения силы тяжести;
Δg - амплитуда переменной составляющей ускорения силы тяжести. Продифференцировав выражение (10) получим

где

Подставим в выражение (12) зависимости (9) и (13). Тогда,

Необходимо учесть, что ускорение силы тяжести с течением времени изменяется незначительно, поэтому можно считать, что  При учете
При учете
данного допущения зависимость (14) примет вид

Как видно из выражения (15), функция 
 обращается в нуль в момент времени, когда cosωp=0. В этом случае, как указывалось выше, выполняется условие (7).
обращается в нуль в момент времени, когда cosωp=0. В этом случае, как указывалось выше, выполняется условие (7).
Необходимо отметить, что в отличие от функции (6), которую невозможно реализовать на борту ЛА ввиду отсутствия информации о νy0, ΔH, ωp, функция (15) может быть достаточно просто реализована.
Действительно
где Δt - шаг интегрирования (j=1, 2, 3...). Информация о кажущемся ускорении  поступает с акселерометров.
поступает с акселерометров.
Таким образом, на борту может быть сравнительно легко определен момент времени ti(i=1, 2, 3...), когда функция  обращается в нуль.
обращается в нуль.
Используя выражение (16), представим зависимости для вертикальной составляющей кажущейся скорости БЛА для i-того и (i+1) моментов времени (i=1, 2, 3...)
Вычтем (18) из (17). Полагая, что за время, равное ti+1-ti, g=const, в итоге получим

Из выражения (19) найдем зависимость для вычисления g
где wyi, wy(i+1) - значения кажущейся скорости БЛА в момент времени, когда  .
.
Далее, зная g, можно вычислить действительные параметры движения управляемого объекта по известным зависимостям:
Итак, используя зависимость (20), можно определить ускорение силы тяжести по информации, полученной на борту БЛА от акселерометров.
Предлагаемый способ вычисления ускорения силы тяжести прост в реализации, что позволяет упростить и процедуру определения параметров движения. Кроме того, способ позволяет ликвидировать положительную обратную связь, в результате этого погрешности, которые характерны для способа-прототипа, исключаются, при этом повышается точность определения навигационных параметров движения БЛА.
Для подтверждения выше сказанного была разработана программа, в которой сравнение предлагаемого способа и способа-прототипа осуществлялось при прочих равных условиях. Регистрация параметров движения осуществлялась на 1500 секунде полета. Результаты исследования приведены в таблице, где - Xi, Нi - действительные значения скорости и высоты полета; X, Н - соответственно дальность и высота при определении g расчетным путем; Xr, Hr - дальность и высота при определении g с помощью предлагаемого способа; ΔХ, ΔН, ΔXr, ΔHr - соответственно отклонения дальностей и высот от истинных значений при учете инструментальной погрешности.
Анализ результатов моделирования подтверждает, что точность определения высоты и дальности полета при определении ускорения силы тяжести предложенным способом существенно выше, чем при вычислении известным способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В РЕЖИМЕ ПЛАНИРОВАНИЯ | 2004 |
|
RU2286590C2 |
| СПОСОБ УВЕЛИЧЕНИЯ ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403184C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| Способ сокращения потерь скорости и времени при осуществлении маневра заданной конфигурации беспилотным летательным аппаратом планирующего типа | 2016 |
|
RU2623361C1 |
| Способ управления беспилотным планирующим летательным аппаратом | 2017 |
|
RU2654238C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 1993 |
|
RU2062990C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
Изобретение относится к области приборостроения и может быть использовано для определения навигационных параметров движения крылатых беспилотных летательных аппаратов (БЛА), совершающих полет в режиме рикошетирования. Технический результат - повышение точности наведения. Для достижения данного результата способ наведения беспилотного летательного аппарата в режиме рикошетирования включает измерение составляющих кажущегося ускорения и определение ускорения силы тяжести путем измерения сигналов в моменты времени, когда производная по кажущему ускорению принимает значение равное нулю, согласно формуле:  где wyi, wy(i+1) - значения кажущейся скорости БЛА; ti(i=1, 2, 3...), ti+1 - моменты времени, когда функция wу обращается в нуль. 1 ил.
где wyi, wy(i+1) - значения кажущейся скорости БЛА; ti(i=1, 2, 3...), ti+1 - моменты времени, когда функция wу обращается в нуль. 1 ил.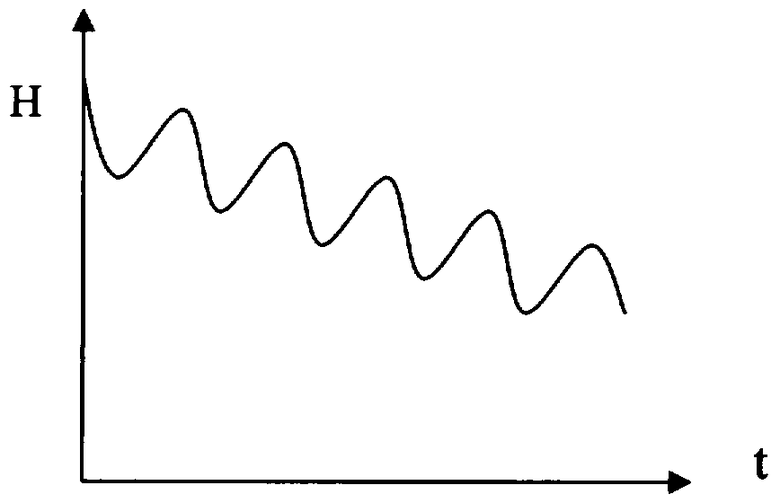
Способ наведения беспилотного летательного аппарата в режиме рикошетирования, включающий измерение составляющих кажущегося ускорения при помощи акселерометров и определение ускорения силы тяжести, отличающийся тем, что ускорение силы тяжести определяют путем измерения сигналов, поступающих с акселерометров в виде кажущегося ускорения в моменты времени, когда производная по кажущему ускорению принимает значение, равное нулю, согласно формуле
где wyi, wy(i+1) - значения кажущейся скорости БЛА;
ti(i=1, 2, 3...), ti+1 - моменты времени, когда функция  обращается в нуль.
обращается в нуль.
| Дмитриевский А.А | |||
| Внешняя баллистика | |||
| - М.: Машиностроение, 1991, с.42 | |||
| Справочник по радиоэлектронике, том 3/Под общей ред | |||
| проф., д.т.н | |||
| А.А.Куликовского | |||
| - М.: Энергия, 1970, с.557 | |||
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |
| Максимов М.В., Горгонов Г.И | |||
| Радиоуправление ракетами | |||
| - М.: Сов | |||
| радио, 1964, с.518 - 521, рис.10.4 | |||
| US 5987371 А, 16.11.1999 | |||
| СПОСОБ ПРОИЗВОДСТВА УГЛЕВОДСОДЕРЖАЩЕГО ЖЕЛИРУЮЩЕГО КОНЦЕНТРАТА ДЛЯ КОНДИТЕРСКИХ ИЗДЕЛИЙ | 2003 |
|
RU2260304C2 |
| US 6319008 В1, 20.11.2001. | |||

