Область техники, к которой относится изобретение
Данное изобретение касается системы для определения местонахождения беспроводных устройств.
Уровень техники
Были реализованы или предложены несколько систем, которые обеспечивают определение информации о местонахождении, с использованием различных методов. Глобальная система определения местонахождения (ГСОМ, GPS) является примером известной системы, которая использует спутники для передачи информации определения местонахождения. Приемное устройство ГСОМ использует эти передачи через спутник как опорные данные для определения его позиции. Недостаток ГСОМ заключается в том, что в некоторых местонахождениях, типа городских "каньонов" или внутри зданий, прохождение сигналов от спутников ГСОМ может преграждаться.
Для применений, в которых требуется определение местонахождения внутри административного здания или аналогичного сооружения, один подход состоит в том, чтобы размещать группу приемных устройств в фиксированных местоположениях внутри здания, и подсоединять передающее устройство к объекту, местонахождение которого требуется определять. Фиксированные приемные устройства связаны с центральным компьютером, который определяет местонахождение объекта на основании сигналов, принимаемых от связанного передающего устройства через одно или несколько приемных устройств из группы приемных устройств. К сожалению, для систем этого типа требуется существенное количество установленной инфраструктуры, включая фиксированные приемные устройства, и проводные подсоединения между приемными устройствами и базовыми станциями. Кроме того, эти системы не обеспечивают точное определение местонахождения.
Для определения расстояния между передающим и приемным устройствами в принципе можно использовать уровень принимаемого сигнала. Другая методика, обычно используемая в определении информации о местонахождении, известна как разность во времени между моментами поступления сигналов (РВМПС, TDOA). Известно, что эти и другие методики, используемые для определения информации об относительном местонахождении, подвержены погрешностям, вызванным различными факторами, включающими затухание в канале, радиопомехи и т.п. Требуется увеличить точность систем для определения местонахождения. Поэтому необходим улучшенный способ определения относительного местонахождения для беспроводных устройств.
Краткое описание чертежей
Признаки изобретения, как мы полагаем, являющиеся новыми, сформулированы в формуле изобретения. Однако само изобретение может быть лучше понято со ссылкой на последующее подробное описание некоторых примерных вариантов осуществления изобретения, приведенных в связи с прилагаемыми чертежами, на которых
Фиг.1 представляет иллюстрацию городской зоны, обслуживаемой спутниками ГСОМ и опорами сотовой сети связи, и в которой расположены беспроводные устройства, вовлеченные в определение местонахождения друг друга, в соответствии с предпочтительным вариантом осуществления изобретения.
Фиг.2 представляет блок-схему беспроводного устройства в соответствии с предпочтительным вариантом осуществления изобретения.
Фиг.3 представляет блок-схему усилителя принимаемого сигнала в соответствии с предпочтительным вариантом осуществления изобретения.
Фиг.4 представляет блок-схему приемопередатчика расширенного спектра радиосигнала по принципу прямой последовательности, используемого для выполнения измерений расстояния по времени поступления сигнала по двум направлениям в соответствии с предпочтительным вариантом осуществления изобретения.
Фиг.5 представляет блок-схему антенны с программным управлением в соответствии с альтернативным вариантом осуществления изобретения.
Фиг.6 представляет схему первого расположения пространственно распределенных приемопередатчиков, работающих в соответствии с настоящим изобретением.
Фиг.7 представляет графическую схему процедур, демонстрирующую первый вариант осуществления, предназначенный для улучшения оценок информации об относительном местонахождении, в соответствии с настоящим изобретением.
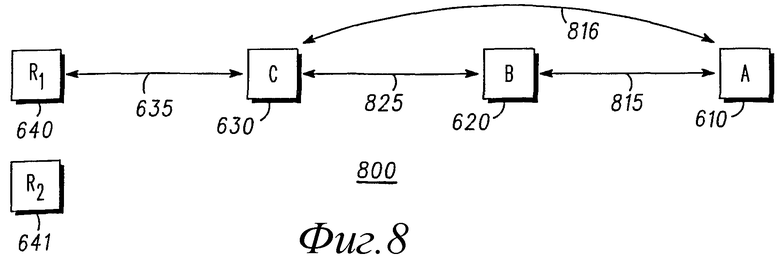
Фиг.8 представляет схему второго расположения пространственно распределенных приемопередатчиков, работающих в соответствии с настоящим изобретением.
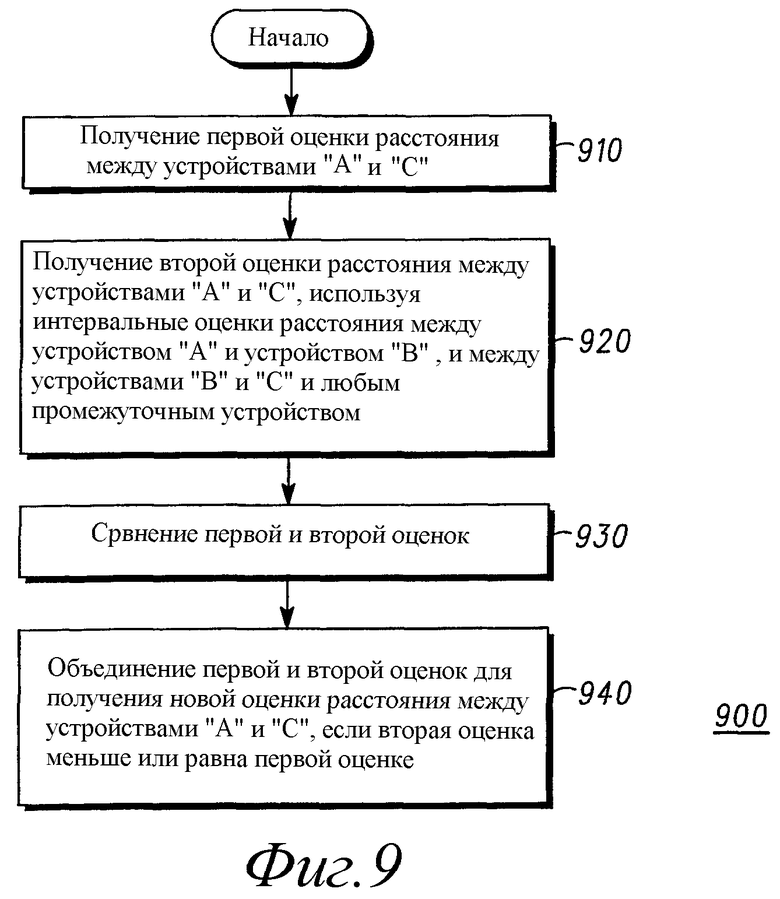
Фиг.9 представляет графическую схему процедур, демонстрирующую второй вариант осуществления, предназначенный для улучшения оценок информации об относительном местонахождении, в соответствии с настоящим изобретением.
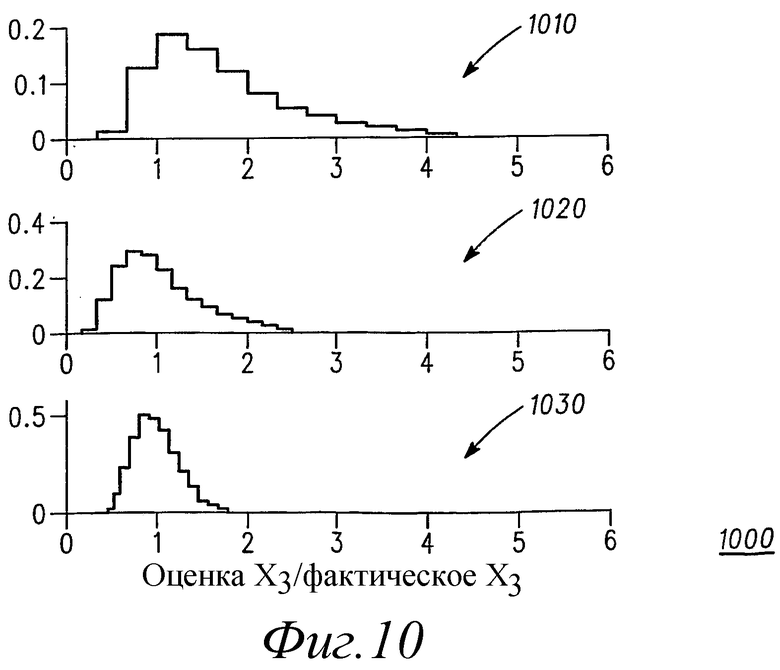
Фиг.10 показывает набор гистограмм, сравнивающий распределение точности различных способов оценки расстояния, в соответствии с настоящим изобретением.
Подробное описание предпочтительных вариантов осуществления
Хотя данное изобретение допускает варианты осуществления в многих различных формах, на чертежах показаны и здесь подробно описаны конкретные варианты осуществления, причем должно быть понятно, что настоящее раскрытие следует рассматривать как пример принципов изобретения, и оно не предназначено для ограничения изобретения конкретными показанными и описанными вариантами осуществления. Далее, используемые здесь термины и слова не должны рассматриваться, как ограничивающие, а скорее просто как описательные. В приведенном ниже описании подобные ссылочные позиции используются для описания тех же самых, аналогичных или соответствующих частей на нескольких видах чертежей.
Настоящее изобретение предлагает способ оценки информации об относительном местонахождении для беспроводных устройств. Индивидуальные оценки получают от двух или более альтернативных средств, которые определяют относительное местонахождение, например информацию о дальности, первого и второго беспроводных устройств относительно друг друга. Эти оценки объединяют для обеспечения новой оценки, которая статистически является более точной, чем любая из индивидуальных оценок. Например, рассмотрим беспроводные устройства 'А' и 'В', которые пространственно разделены. В соответствии с изобретением, первую оценку относительного местонахождения в отношении устройств 'А' и 'В' получают с помощью некоторого средства, например, с помощью анализа передаваемых сигналов между устройствами 'А' и 'В'. Вторую оценку относительного местонахождения между устройствами 'А' и 'В' получают, используя оценку относительного местонахождения между устройством 'А' и третьим беспроводным устройством 'C'. В одном варианте осуществления устройства 'В' и 'C' находятся на близком расстоянии друг от друга относительно разности в местонахождении между устройством 'А' и любым из устройств 'В' и 'C'. Объединяя первую и вторую оценки, можно получить новую оценку, которая является статистически более точной, чем первая или вторая оценки. В другом варианте осуществления устройство 'C' определяется как находящееся на пути между устройствами 'А' и 'В', а вторая оценка отражает по меньшей мере часть пути между устройствами 'C' и 'В'.
Фиг.1 представляет схематическую иллюстрацию городской зоны 100, имеющей беспроводные устройства 122, 124, 126, 128, которые работают в соответствии с настоящим изобретением. Хотя городская зона показана для контекстных целей, настоящее изобретение не ограничено каким-либо географическим или ситуативным окружением. В пределах видимости городской зоны 100 показаны на орбите спутники 110, 112 глобальной системы определения местонахождения (ГСОМ, GPS). Спутники ГСОМ обеспечивают опорные сигналы, которые могут использоваться приемным устройством для определения информации о местонахождении. Два приемопередатчика 114, 116 базовых станций показаны, соответственно, расположенными наверху двух зданий. Приемопередатчики 114 и 116 базовых станций могут использоваться для выполнения измерений сигналов с целью определения расстояний до беспроводных устройств 122-128. Третья базовая станция 118 оборудована фазированной антенной решеткой или "интеллектуальной" антенной 120 (антенной с программным управлением). Антенна 120 с программным управлением содержит множество излучателей, а также обрабатывающие электронные схемы. Используя алгоритм направления поступления сигнала (НПС, DOA), антенна 120 с программным управлением может определять направление на различные беспроводные устройства 122-228, от которых она принимает сигналы. Здания 102, 104, 106, 108, расположенные в городской зоне 100, имеют потенциальную возможность блокировать сигналы беспроводной передачи и/или порождать помехи многолучевого распространения сигнала. Следовательно, некоторые беспроводные устройства не могут иметь готового доступа к опорному источнику для непосредственного получения информации о местонахождении.
В соответствии с настоящим изобретением одно или несколько беспроводных устройств полагаются на спутники 110, 112 ГСОМ и передающие устройства 114, 116 базовых станций относительно опорных сигналов для определения настоящего местонахождения, в то время как некоторые беспроводные устройства устанавливают информацию об относительном местонахождении в отношении других беспроводных устройств. В частности, точность такой информации об относительном местонахождении увеличивается при объединении оценок относительного местонахождения при использовании двух или более альтернативных путей.
Фиг.2 представляет схематическое изображение устройства 200 беспроводной связи (приемопередатчика) в соответствии с предпочтительным вариантом осуществления изобретения. Что касается фиг.2, то на ней антенна 202 электрически подсоединена к первому выводу переключателя 236 передающего/приемного устройства (Пер/Пр). Второй вывод переключателя 236 передающего/приемного устройства электрически подсоединен ко входу усилителя 204 принимаемого сигнала. Выход усилителя принимаемого сигнала 204 электрически подсоединен к демодулятору 206. К демодулятору 206 также электрически подсоединен гетеродин 210. Выход демодулятора 206 электрически подсоединен к первому входу аналого-цифрового преобразователя 208. Сигнал, отводимый в контуре обратной связи усилителя в усилителе 204 принимаемого сигнала, электрически подсоединяется ко второму входу аналого-цифрового преобразователя 208. Сигнал из контура обратной связи усилителя указывает уровень (мощность) принимаемого сигнала. Такое измерение называется индикатором уровня принимаемого сигнала (ИУПС, RSSI). Чтобы выполнить измерение ИУПС, полезный индикатор расстояния, на заданном уровне передается сигнал. Антенна 202, переключатель 236 Пер/Пр, усилитель 204 принимаемого сигнала и демодулятор 206 формируют приемное устройство.
Выход цифроаналогового преобразователя 216 электрически подсоединен к модулятору 214. Гетеродин 210 также подсоединен к модулятору 214. Выход модулятора 214 электрически подсоединен ко входу усилителя 212 передаваемого сигнала. Выход усилителя 212 передаваемого сигнала электрически подсоединен к третьему выводу переключателя 236 передающего/приемного устройства. Модулятор 214, усилитель 212 передаваемого сигнала, переключатель Пер/Пр 236 и антенна 202 формируют передающее устройство.
Выход аналого-цифрового преобразователя 208, вход цифроаналогового преобразователя 216, оперативное запоминающее устройство (ОЗУ) 218, память 220 для хранения программ, процессор 222, электронные схемы 224 устройства сопряжения акселерометра и модуль 226 ГСОМ или другого опорного определения местонахождения электрически подсоединены к шине 228 цифровых сигналов. Память 220 для хранения программ может быть выполнена, например, в виде электрически стираемого программируемого постоянного запоминающего устройства (ЭСП ПЗУ). Процессор 222 предпочтительно содержит программируемый процессор цифровой обработки сигналов (ПЦОС). Электронные схемы устройства сопряжения акселерометра используются для сопряжения с акселерометром 230. Электронные схемы 224 устройства сопряжения могут быть электрически подсоединены к выводу прерывания процессора 222. Электронные схемы 224 устройства сопряжения можно обеспечивать таким образом, чтобы при перемещении беспроводного устройства 200 акселерометр выводил сигнал, который вводится в электронные схемы 224 устройства сопряжения, которые выводят сигнал, вызывающий применение прерывания к процессору 222. Программа, которая выполняется в ответ на запрос прерывания, представляет собой программу, включенную в определение местонахождения беспроводного устройства. Программа хранится в памяти 220 для хранения программ. Хотя для запуска выполнения программ определения местонахождения является предпочтительным использовать акселерометр, в качестве альтернативы, можно записать программы определения местонахождения для периодического определения местонахождения.
Преобразователь 232 входного аналогового сигнала электрически подсоединен ко второму входу аналого-цифрового преобразователя 208. Преобразователь 232 входного аналогового сигнала может быть выполнен, например, в виде микрофона. Преобразователь 234 выходного сигнала электрически подсоединен ко второму выходу цифроаналогового преобразователя 216. Преобразователь 234 выходного сигнала может быть выполнен, например, в виде громкоговорителя.
В случае беспроводного устройства, которое используется для маркирования (тегирования) подвижных объектов в здании для целей управления ресурсами, можно обойтись без преобразователей 232 и 234 входного и выходного аналогового сигнала.
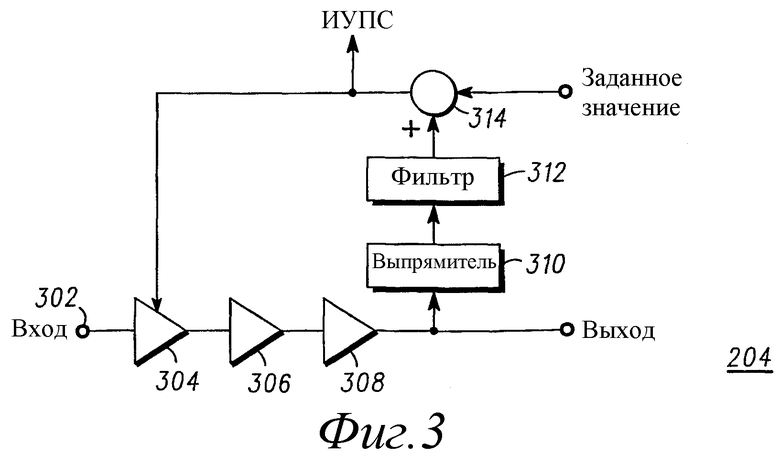
Фиг.3 представляет блок-схему усилителя 204 принимаемого сигнала в соответствии с предпочтительным вариантом осуществления изобретения. Усилитель 204 принимаемого сигнала содержит вход 302, электрически подсоединенный к первому усилителю 304, второй усилитель 306, электрически подсоединенный к первому усилителю 304, и третий усилитель 308, электрически подсоединенный ко второму усилителю 306. Выход третьего усилителя 308 электрически подсоединен к демодулятору 206 и выпрямителю 310. Выпрямитель 310 электрически подсоединен к фильтру 312 нижних частот. Выход фильтра 312 нижних частот электрически подсоединен к первому входу дифференциального усилителя. Напряжение заданного значения, которое соответствует значению выходной мощности, установленному для усилителя 204 принимаемого сигнала, прикладывается ко второму входу дифференциального усилителя 314. Выход дифференциального усилителя 314 электрически подсоединен ко второму входу аналого-цифрового преобразователя 208 и ко входу регулировки усиления первого усилителя 304. Выход дифференциального усилителя представляет собой ИУПС. Усилитель 204 принимаемого сигнала в комбинации с аналого-цифровым преобразователем 208 образует измеритель уровня сигнала.
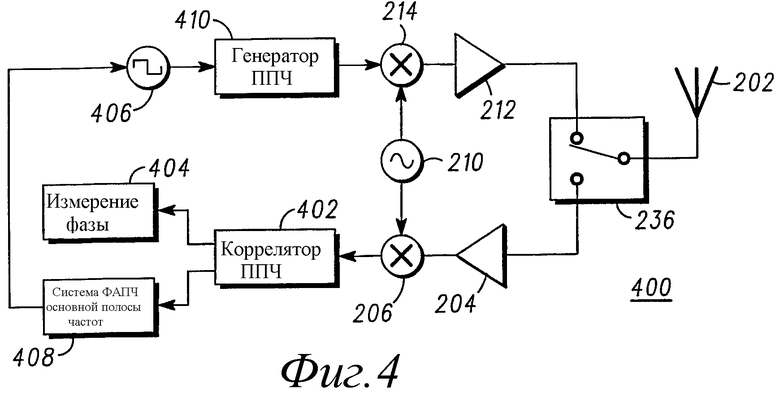
Фиг.4 представляет функциональную блок-схему приемопередатчика 400 расширенного спектра радиосигнала по принципу прямой последовательности, используемого для выполнения измерений расстояния по времени поступления сигнала по двум направлениям. Некоторые элементы оборудования, показанные на фиг.2, на фиг.4 опущены, потому что фиг.4 предназначена для иллюстрации специфической функции, которая может быть выполнена при использовании оборудования, показанного на фиг.2. Что касается фиг.4, то там показаны из фиг.2 антенна 202, переключатель 236 передающего/приемного устройства, усилитель 204 принимаемого сигнала, усилитель 212 передаваемого сигнала, демодулятор 206, модулятор 214 и гетеродин 210.
Демодулятор 206 электрически подсоединен к гетеродину 210, коррелятору 402 последовательности псевдослучайных чисел (ППЧ). Генератор 410 ППЧ также электрически подсоединен к коррелятору 402. Коррелятор 402 используется для выполнения вычисления корреляций между версией ППЧ, полученной от демодулятора 206, и версией ППЧ, вводимой генератором 410. Коррелятор 402 взаимодействует с измерителем 404 фазы, который определяет относительный сдвиг по фазе между двумя версиями ППЧ, что дает максимальный результат вычисления корреляций. Выход коррелятора 402 электрически подсоединен ко входу системы 408 фазовой автоматической подстройки частоты (ФАПЧ) основной полосы частот. Система 408 ФАПЧ основной полосы частот электрически подсоединена к генератору 406 тактовых импульсов. Генератор 406 тактовых импульсов электрически подсоединен к генератору 410 ППЧ. Генератор ППЧ электрически подсоединен к модулятору 214.
Коррелятор 402, измеритель 404 фазы, систему 408 ФАПЧ основной полосы и генератор 410 ППЧ можно воплотить в виде одной или нескольких программ, хранящихся в памяти 220 для хранения программ, и выполнять посредством процессора 222.
Один и тот же приемопередатчик 400 может использоваться двумя или более устройствами, которые включены в измерение расстояния по времени поступления сигнала (ВПС) по двум направлениям. Одно устройство представляет собой инициатор, и другое устройство - ответчик. При работе сначала инициатор генерирует и посылает ППЧ. Ответчик принимает ППЧ и, используя систему 408 ФАПЧ, корректирует тактовую частоту генератора 406 тактовых импульсов, с помощью которой он измеряет время, и это используется для управления генератором 410 ППЧ, с целью согласования с частотой следования элементарных посылок принимаемого сигнала основной полосы. После ожидания в течение некоторого периода времени ответчик ретранслирует ППЧ. Период времени, в течение которого ответчик ожидает, предпочтительно определяется следующим выражением:
T=R*BT,
где BT - продолжительность последовательности псевдослучайных чисел, и
R - случайное целое число.
Продолжительность последовательности псевдослучайных чисел, умноженная на скорость света, предпочтительно должна быть больше, чем дальность приемопередатчика, чтобы избежать неоднозначности в измеряемом расстоянии. Введение случайности в ответ имеет тенденцию избегать конфликтов между множеством отвечающих устройств, если они запрограммированы для реагирования на одну и ту же последовательность псевдослучайных чисел.
После приема ППЧ, ретранслируемой ответчиком, инициатор, используя измеритель 404 фазы, взаимодействующий с коррелятором 402, определяет время смещения между временем, в которое псевдослучайное число было вначале послано инициатором, и временем, в которое псевдослучайное число было получено обратно от ответчика. Время смещения умножается на C для получения измерения расстояния, разделяющего инициатора и ответчика. Операция корреляции представляет собой измерение сигнала, при котором измеряется фаза принимаемого сигнала.
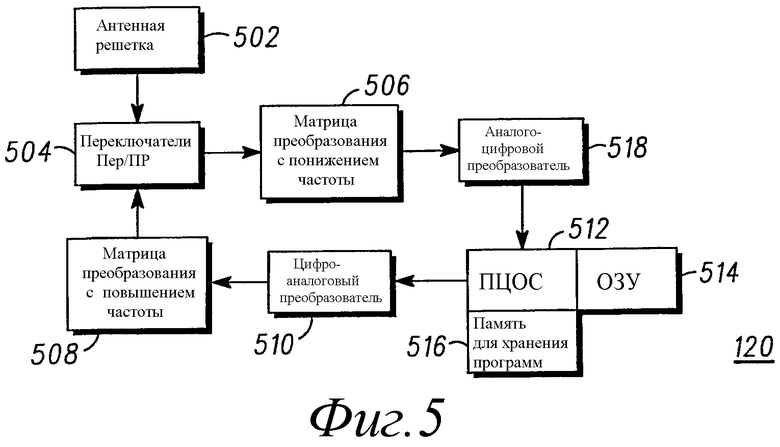
Фиг.5 представляет блок-схему антенны 120 с программным управлением в соответствии с альтернативным вариантом осуществления изобретения. Рассмотрим фиг.5, на которой антенная решетка 502 электрически подсоединена к матрице 504 переключателей приемных/передающих устройств. Антенная решетка содержит фазированную антенную решетку, чтобы можно было выбирать сигналы, передаваемые с выбранного направления. Матрица 504 переключателей приемных/передающих устройств электрически подсоединена к матрице 506 преобразования с понижением частоты и к матрице 508 преобразования с повышением частоты. Матрица 506 преобразования с понижением частоты электрически подсоединена к многоканальному аналого-цифровому преобразователю 518. Матрица преобразования с повышением частоты электрически подсоединена к многоканальному цифроаналоговому преобразователю 510. Процессор 512 цифровой обработки сигналов электрически подсоединен к многоканальному аналого-цифровому преобразователю и к многоканальному цифроаналоговому преобразователю 510. Процессор 512 цифровой обработки сигналов объединен с оперативным запоминающим устройством 514 и памятью 516 для хранения программ или электрически подсоединен к ним. Алгоритм направления поступления сигнала (НПС) хранится в памяти 516 для хранения программ и выполняется процессором 512 цифровой обработки сигналов. Алгоритм НПС обрабатывает сигналы, оцифрованные многоканальным аналого-цифровым преобразователем 518, для выбора сигналов, поступающих на антенную решетку 502 с конкретных направлений. Алгоритм НПС определяет направление, в котором расположено удаленное передающее устройство. Сигналы также могут быть переданы в конкретном направлении антенной решеткой 502 посредством управления относительным фазированием сигналов, применяемым к множеству антенн в антенной решетке 502.
Единственное измерение НПС для конкретного подвижного беспроводного устройства, в отсутствие другой информации, может просто определить его направление. Однако такое измерение может быть использовано, согласно способу изобретения, чтобы способствовать оценкам местонахождения для конкретного подвижного устройства и других подвижных устройств поблизости от него.
Вместо того, чтобы быть зафиксированной на базовой станции 118, антенна 120 с программным управлением может быть установлена на первом подвижном устройстве, например, на беспроводном устройстве, установленном на транспортном средстве. Если пеленг (азимут) первого подвижного устройства не известен, тогда направление на другие подвижные устройства (например, передающие подвижные устройства) не будет иметь большого применения, однако, разница между направлениями на два других устройства, при измерении с использованием антенны с программным управлением в первом устройстве, будет инвариантной при вращениях первого подвижного устройства, и согласно способу изобретения, может использоваться в оценке местонахождений этих трех устройств и других устройств, находящихся поблизости от них.
Фиг.6 изображает систему 600 пространственно распределенных приемопередатчиков, называемых здесь узлами, работающими в соответствии с настоящим изобретением. Система 600 может использоваться как слабосвязанная сеть устройств, или с инфраструктурой для более централизованного управления. Показанная система 600 включает в себя опорные узлы 640, 641, то есть узлы с установленными позициями, основанными на системах отсчета, узел 630 с известной пространственной взаимосвязью 635 по меньшей мере с одним опорным узлом 640, и узлы 610, 620 неизвестного местонахождения в процессе установления информации о местонахождении. Для целей обсуждения, два узла, которые имеют неизвестное местонахождение, отмечены как устройство 'А' 610 и устройство 'В' 620, а узел с известной пространственной взаимосвязью с опорным узлом, отмечен как 'C'. В предпочтительном варианте осуществления каждое из устройств 610, 620, 630 имеет возможность определения своего местонахождения относительно другого устройства внутри диапазона связи, одноранговым способом, используя алгоритмы, основанные на разности времени поступления сигнала, уровне принимаемого сигнала или других таких методиках. Однако в соответствии с настоящим изобретением, при определенных обстоятельствах, устройство может улучшать точность оценки информации об относительном местонахождении по отношению к другому устройству, используя оценки относительного местонахождения для третьего устройства.
Фиг.7 изображает графическую схему процедур 700 первого варианта осуществления, предназначенных для улучшения оценок информации об относительном местонахождении, в соответствии с настоящим изобретением. Что касается фиг.6 и 7, то там устройства 'А' и 'В' установили оценки относительного местонахождения, например, дальность или расстояние и направление, относительно друг друга. Затем устройство 'C' устанавливает связь с устройством 'А' и получает первую оценку относительного местонахождения по отношению к устройству 'А', этап 710. На этапе 720 устройство 'C' также получает вторую оценку относительного местонахождения по отношению к устройству 'В'. На основании информации, собранной от устройств 'А' и 'В', устройство 'C' определяет, что устройства 'А' и 'В' находятся на близком расстоянии друг от друга относительно их местонахождения по отношению к устройству 'C', этап 730. Следовательно, полагают, что устройства 'А' и 'В' расположены рядом и оценки относительного местонахождения между устройствами 'C' и 'А' и между устройствами 'C' и 'В' объединяются для получения статистически более точной оценки по сравнению с каждой индивидуальной оценкой по отдельности, этап 740. Следует отметить, что хотя устройство 'C' описано как определяющее или получающее оценки, настоящее изобретение предполагает, что такое определение может выполняться и другими устройствами одноранговым или другим способом. Помимо этого, описанные процедуры не зависят от порядка определения оценок.
Способ объединения оценок предпочтительно связан с методикой, используемой для получения оценок. В одном варианте осуществления, упомянутые выше первая и вторая оценки являются оценками расстояния, полученными с использованием алгоритма, основанного на уровне принимаемого сигнала. В этом варианте осуществления первая оценка и вторая оценка усредняются вместе, с использованием функции среднего геометрического, для получения новой оценки. В частности, новая оценка, dAB,С, является такой, что dAB,С = √(dA,С dB,С), где dA,С является первой оценкой, а dB,С - второй оценкой. В другом варианте осуществления, упомянутые выше первая и вторая оценки представляют собой оценки расстояния, полученные с использованием алгоритма, основанного на разности времени поступления сигнала. В этом втором варианте осуществления для получения новой оценки первая оценка и вторая оценка усредняются вместе с использованием функции среднего арифметического. В частности, новая оценка, dAB,С, является такой, что dAB,С = (dA,С + dB,С)/2, где dA,С - первая оценка, а dB,С - вторая оценка. Концепция без труда расширяется на использование комбинации трех или более оценок для формирования новой оценки, которая является статистически более точной.
Фиг.8 изображает вторую систему 800 пространственно распределенных приемопередатчиков, работающую в соответствии с настоящим изобретением. Устройства 630, 640, 641 имеют возможности обмена информацией и рабочие характеристики, как описано относительно фиг.6. Однако по меньшей мере три устройства, а именно устройство 'А' 610, устройство 'В' 620 и устройство 'C' 630, пространственно размещены другим образом. В частности, эти устройства 610, 620, 630 размещены так, что устройство 'В' 620 находится между устройством 'А' 610 и устройством 'C' 630. В соответствии с настоящим изобретением, когда обнаружено, что три или более устройств расположены по существу последовательно, точность оценки относительного местонахождения между двумя устройствами может быть увеличена посредством объединения такой оценки с оценками относительного местонахождения между такими устройствами. Таким образом, например, оценка расстояния 816 между устройством 'А' 610 и устройством 'C' 630 может быть получена посредством объединения оценок 815, 825 между устройствами 'А' и 'В' и между устройствами 'В' и 'C'. Улучшенная оценка расстояния между 'А' и 'C' может быть выполнена путем объединения оценки 816, полученной непосредственно между устройствами 'А' и 'C', с оценками 815, 825 между устройствами 'А' и 'В' и между устройствами 'В' и 'C'.
Фиг.9 изображает графическую схему процедур для оценки информации об относительном местонахождении, соответствующей расположению, изображенному на фиг.8. Рассмотрим фиг.8 и 9, на которых устройство 'C' устанавливает связь с устройством 'А' и получает первую оценку относительного местонахождения или расстояния относительно устройства 'А', этапа 910. Устройство 'C' также получает вторую оценку относительного местонахождения по отношению к устройству 'А', используя интервальные оценки расстояния между устройствами 'А' и 'В', и между устройствами 'В' и 'C', включая любое промежуточное устройство, этап 920. Если были другие промежуточные устройства, могут быть разработаны дополнительные интервальные оценки, такие как от устройства 'В' до гипотетического устройства 'X', и между устройством 'X' и устройством 'C'. Первая и вторая оценки сравниваются, на этапе 930, и если вторая оценка меньше или равна первой оценке, то делается предположение, что устройства 'А', 'В', 'C' 610, 620, 630 выровнены или расположены последовательно. В таком случае первая и вторая оценки расстояния объединяются для получения новой оценки расстояния, которая является статистически более точной, чем первая или вторая оценка по отдельности, этап 940. Как заявлено прежде, хотя устройство 'C' описано как определяющее или получающее оценки, настоящее изобретение рассматривает, что такое определение может быть выполнено другими устройствами.
Этот способ объединения оценок особенно полезен, когда оценки расстояния получены с использованием алгоритма, основанного на уровне принимаемого сигнала. Из-за некоторых погрешностей, которые имеют склонность возникать в этом способе оценки расстояния, когда выровнены три или более устройств, как в случае, изображенном на фиг.8, оценка расстояния между 'А' и 'C', dA,С, часто бывает больше, чем сумма (dB,С + dA,B), где dB,С - оценка расстояния между устройствами 'В' и 'C', а dA,B - оценка расстояния между 'А' и 'В'. Таким образом, если dA,С >= dB,С + dA,B, то полагают, что устройства выровнены. Используют формулу:
где 'а' - весовой коэффициент, который в предпочтительном варианте осуществления был выбран равным 0,67. Эта формула представляет взвешенное среднее геометрическое значений (dB,С + dA,B) и dA,С. Предпочтительно, чем больше вес проставлен у суммы (dB,С + dA,B), которая была найдена при моделированиях, тем более точный результат будет получен по сравнению с dA,С.
Фиг.10 изображает набор гистограмм 1000 результатов моделирования, который сравнивает распределение точности различных способов оценки расстояния. Точность выражена как отношение оценки расстояния, при использовании конкретного способа, к фактическому расстоянию, если оно точно измерено. Первая гистограмма 1010 изображает распределение точности для dA,С, то есть прямое измерение между устройствами 'А' и 'C', с использованием методики уровня принимаемого сигнала. Следует отметить широкое отклонение в точности. Вторая гистограмма 1020 изображает распределение точности для суммы (dB,С + dA,B), то есть прямое измерение между устройствами 'А' и 'В' и между устройствами 'В' и 'C', с использованием методики уровня принимаемого сигнала. Обратите внимание, что отклонение в точности существенно улучшено по сравнению с первой гистограммой. Третья гистограмма 1030 изображает распределение точности для взвешенного среднего геометрического, которое объединяет dA,С с суммой (dB,С + dA,B), когда dA,С > суммы (dB,С + dA,B). Обратите внимание, что отклонение в точности существенно улучшено по сравнению с первой и второй гистограммами.
Настоящее изобретение предлагает существенные преимущества по сравнению с известным уровнем техники. Оценка относительного местонахождения между первым и вторым устройствами улучшается посредством объединения этих оценок относительного местонахождения по отношению к третьему устройству. Системы, использующие одноранговые измерения в определении местонахождения, могут использовать описанные способы для улучшения точности определения местонахождения и пользоваться существенными выгодами.
Хотя изобретение было конкретно показано и описано со ссылкой на предпочтительный вариант осуществления, специалистам в данной области техники должно быть понято, что могут быть выполнены различные видоизменения в форме и деталях, не отходя при этом от объема и сущности изобретения.



Изобретение относится к уровню техники определения относительного местонахождения для беспроводных устройств. Технический результат заключается в повышении точности определения относительного местонахождения беспроводных устройств, который достигается за счет того, что от двух или более альтернативных средств, которые определяют относительное местонахождение, например информацию о дальности первого и второго беспроводных устройств относительно друг друга, получают индивидуальные оценки. По меньшей мере, одна из этих оценок включает в себя оценку относительного местонахождения между одним из первого и второго устройств и третьим устройством. Эти оценки объединяют для обеспечения новой оценки, которая является статистически более точной, чем любая из индивидуальных оценок. 3 н. и 7 з.п. ф-лы, 10 ил.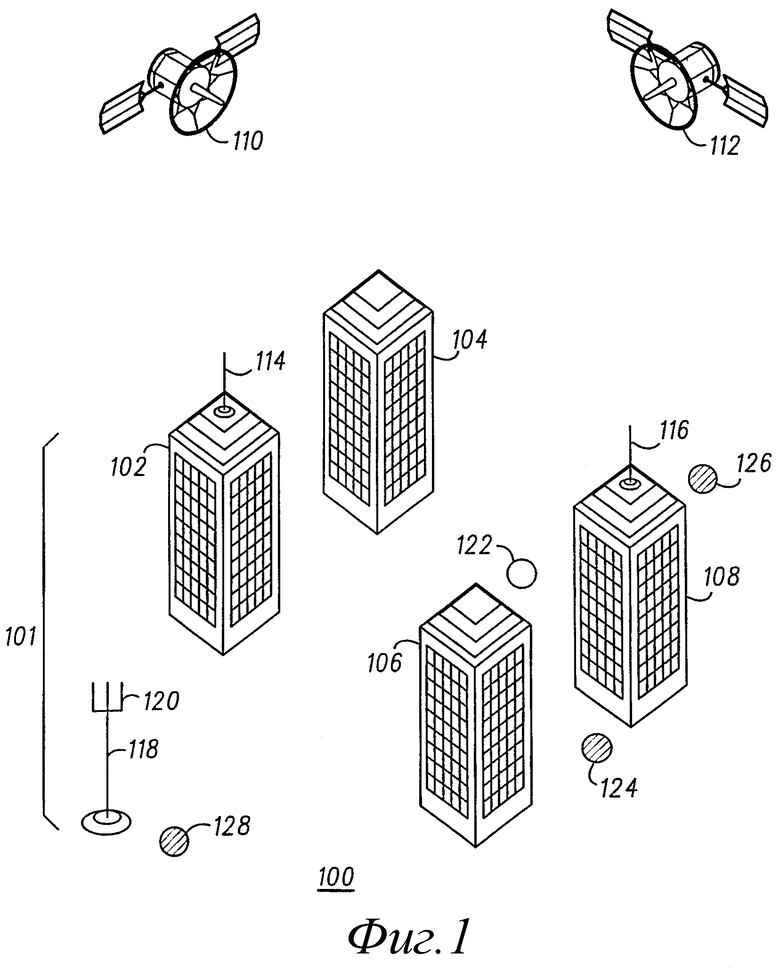
принимают сигнал от второго беспроводного устройства,
определяют первую оценку относительного местонахождения первого беспроводного устройства по отношению ко второму беспроводному устройству на основании сигнала от второго беспроводного устройства,
принимают сигнал от третьего беспроводного устройства,
определяют вторую оценку относительного местонахождения первого беспроводного устройства по отношению к третьему беспроводному устройству на основании сигнала от третьего беспроводного устройства и
получают новую оценку относительного местонахождения первого беспроводного устройства по отношению ко второму беспроводному устройству на основании объединения, которое содержит первую и вторую оценки,
причем определения первой оценки и второй оценки основаны на уровне принимаемых сигналов или на времени поступления принимаемых сигналов.
получают третью оценку, представляющую по меньшей мере часть расстояния между вторым беспроводным устройством и третьим беспроводным устройством,
вычисляют альтернативную оценку для расстояния между первым беспроводным устройством и вторым беспроводным устройством, используя вторую и третью оценки,
сравнивают первую оценку с альтернативной оценкой,
если альтернативная оценка меньше или равна первой оценке, определяют новую оценку через объединение, которое содержит первую, вторую и третью оценки.

где dA,C является первой оценкой, dA,B - второй оценкой, a dB,C - третьей оценкой.
принимают сигнал от третьего беспроводного устройства,
определяют первую оценку расстояния между первым устройством и третьим устройством на основании сигнала от третьего беспроводного устройства,
получают вторую оценку расстояния между вторым устройством и третьим устройством,
определяют, что первое и второе устройства находятся близко друг к другу относительно их расстояния от третьего устройства, и при таком определении объединяют, по меньшей мере, первую оценку и вторую оценку для получения новой оценки расстояния до третьего устройства для каждого из первого и второго устройств,
причем определения первой оценки и получение второй оценки основаны на уровне принимаемых сигналов или на времени поступления принимаемых сигналов.
принимают сигнал от второго беспроводного устройства,
определяют первую оценку расстояния между первым устройством и вторым устройством на основании сигнала от второго беспроводного устройства,
получают вторую оценку расстояния между первым устройством и вторым устройством, которая содержит первую интервальную оценку расстояния между первым устройством и третьим устройством и вторую интервальную оценку, представляющую, по меньшей мере, часть расстояния между третьим устройством и вторым устройством, и
объединяют первую оценку расстояния и, по меньшей мере, первую и вторую интервальные оценки расстояния для получения новой оценки расстояния между первым и вторым устройствами,
причем определения первой оценки и получение второй оценки основаны на уровне принимаемых сигналов или на времени поступления принимаемых сигналов.
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СОТОВОГО ТЕЛЕФОНА | 1994 |
|
RU2107925C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ В СИСТЕМЕ РАДИОСВЯЗИ С МНОГОСТАНЦИОННЫМ ДОСТУПОМ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1996 |
|
RU2127963C1 |
| US 6097336 А, 01.08.2000 | |||
| СОТОВАЯ СИСТЕМА СВЯЗИ | 1991 |
|
RU2100904C1 |
| ПРОЦЕССОР ПОИСКА ДЛЯ МНОГОСТАНЦИОННОЙ СИСТЕМЫ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ | 1995 |
|
RU2149509C1 |

