Изобретение относится к машиностроению, в частности к электромагнитным подвесам вращающихся роторов.
Известна магнитоэлектрическая опора, содержащая ротор и статор, установленные на них соосно с аксиальным зазором постоянные кольцевые магниты, а также смонтированные на статоре кольцевые обмотки управления аксиальным положением подвижного элемента (Патент США №3929390).
Недостатком такой конструкции является ее сложность в системе обеспечения аксиальной устойчивости ротора.
Наиболее близка к предлагаемой магнитоэлектрическая опора, содержащая ротор и статор, расположенные на роторе постоянные кольцевые магниты, а также расположенные на статоре обмотки управления и систему управления, содержащую датчик положения подвижной части, блоки сравнения, регуляторы, блок задания, при этом расположенные на статоре обмотки управления соединены с источником питания и управляемыми преобразователями (А.С. СССР №1051341).
Недостатками такой конструкции являются большой момент сопротивления, большой расход мощности в системе управления.
Техническим результатом является снижение момента сопротивления, уменьшение мощности управления и повышение КПД.
Технический результат достигается тем, что магнитоэлектрическая опора содержит ротор и статор, расположенные на роторе постоянные кольцевые магниты, а также расположенные на статоре обмотки управления и систему управления, содержащую датчик аксиального положения ротора, блоки сравнения, регуляторы, блок задания, при этом расположенные на статоре обмотки управления соединены с источником питания и управляемыми преобразователями. Конструкция магнитоэлектрической опоры содержит два аналогичных узла, размещенных на оси магнитоэлектрической опоры, каждый из узлов содержит закрепленный на роторе постоянный кольцевой П-образный магнит, два установленных на статоре взаимно противоположно постоянных П-образных магнита, два установленных на статоре взаимно противоположно П-образных полюса с размещенными на них первой и второй обмотками управления, при этом магнитные полюса постоянного кольцевого П-образного магнита и П-образных магнитов, установленных на роторе, сориентированы одноименно, вдоль оси магнитоэлектрической опоры на концах ротора и на статоре установлены постоянные магниты, полюса которых сориентированы одноименно. В систему управления каждым узлом магнитоэлектрической опоры введен инвертор и выход датчика аксиального положения ротора подключен через первый вход первого блока сравнения и первый регулятор - к входу первого управляемого преобразователя, а также через инвертор, первый вход второго блока сравнения и второй регулятор - к входу второго управляемого преобразователя, а вторые входы первого и второго блоков сравнения соединены с блоком задания.
На фиг.1 представлена конструкция магнитоэлектрической опоры, продольный разрез.
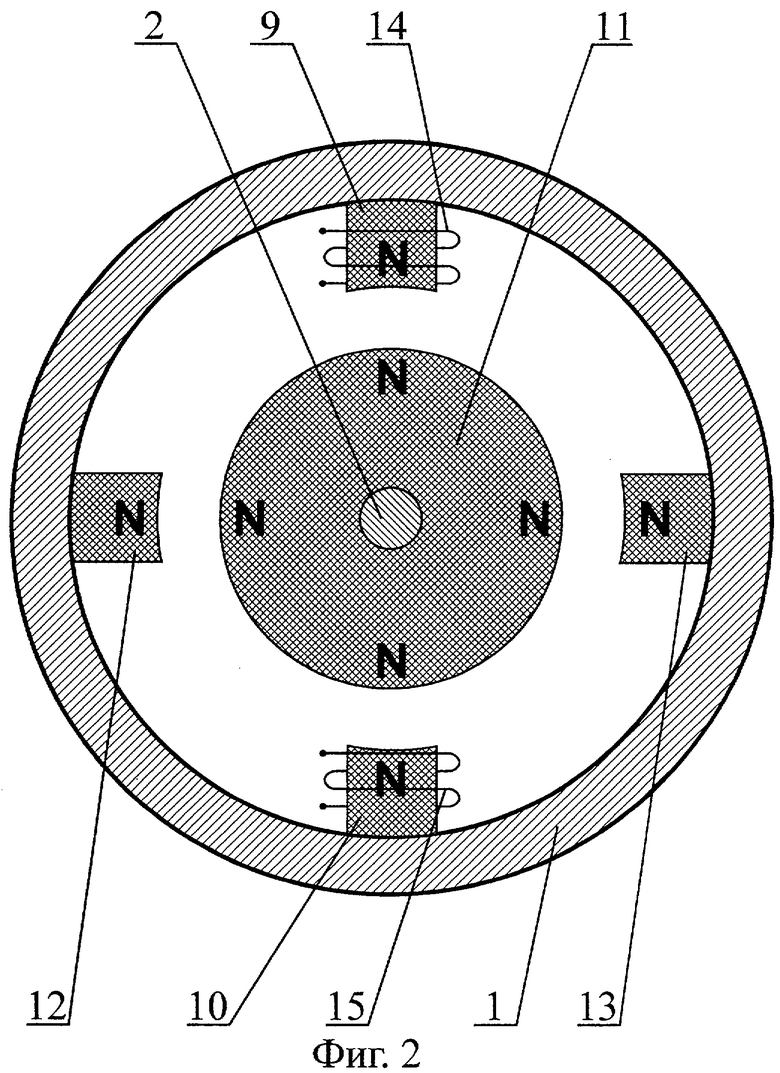
На фиг.2 показан поперечный разрез магнитоэлектрической опоры в местах действия П-образных полюсов с обмотками управления.
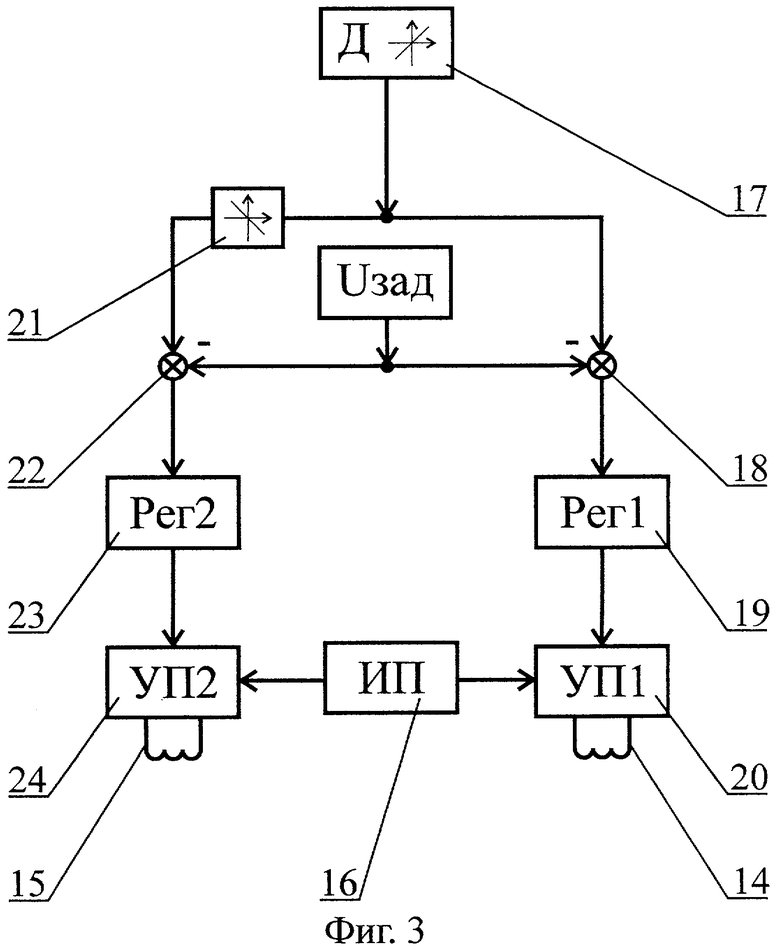
На фиг.3 представлена блок-схема системы автоматического управления (САУ) магнитоэлектрической опоры.
Для решения проблемы аксиальной стабилизации в магнитоэлектрической опоре (фиг.1) на концах ротора 2 в направлении оси магнитоэлектрической опоры расположены постоянные магниты 5, 6, а в статоре 1 расположены направленные на них одноименными полюсами постоянные магниты 3, 4. Данные магниты благодаря своему взаимодействию путем отталкивания друг от друга приводят ротор к аксиальной стабилизации без использования каких-либо систем стабилизации (включающих необходимые датчик, систему управления и т.д.).
Система радиальной стабилизации магнитоэлектрической опоры разделена на два аналогичных узла 7 и 8, размещенных вдоль оси магнитоэлектрической опоры и имеющих отдельные независимые каналы САУ. Рассмотрим устройство одного из узлов и его канал САУ на примере узла 7.
Узел 7 содержит расположенный на роторе постоянный кольцевой П-образный магнит 11, а на статоре - два установленных взаимно противоположно постоянных П-образных магнита 12 и 13 (фиг.2) и два установленных взаимно противоположно П-образных полюса 9 и 10 с размещенными на них обмотками управления 14 и 15. Магнитные полюса постоянных П-образных магнитов, установленных на статоре и роторе, сориентированы одноименно, а оси находящихся на статоре постоянных П-образных магнитов и П-образных полюсов с обмотками управления расположены взаимно перпендикулярно.
Обмотки управления 14 и 15 подключены к источнику питания 16 через отдельный канал САУ (фиг.3), который состоит из датчика аксиального положения ротора 17; выход которого подключен через первый вход первого блока сравнения 18 и первый регулятор 19 к входу первого управляемого преобразователя 20, а также через инвертор 21, первый вход второго блока сравнения 22 и второй регулятор 23 - к входу второго управляемого преобразователя 24, а вторые входы первого 18 и второго 22 блоков сравнения соединены с блоком задания 25.
Магнитоэлектрическая опора работает следующим образом.
Постоянные магниты 5 и 6, расположенные на концах ротора, при взаимодействии с одноименно направленными постоянными магнитами 3 и 4, расположенными на статоре, создают отталкивающие силы, действующие в аксиальной плоскости, которые, компенсируя друг друга, стабилизируют ротор в аксиальной плоскости.
Радиальная стабилизация достигается путем взаимонезависимого действия узлов 7 и 8 магнитоэлектрической опоры. Рассмотрим их действие на примере узла 7.
Пара постоянных П-образных магнитов 12 и 13, расположенная на статоре, взаимодействуя с одноименно направленным постоянным кольцевым П-образным магнитом ротора 11, образуют компенсирующую силу в плоскости, параллельной плоскости основания магнитоэлектрической опоры. Токи, протекающие в обмотках управления 14 и 15 пары П-образных полюсов 9 и 10, создают электромагнитные силы, которые, взаимодействуя с одноименно направленным постоянным кольцевым П-образным магнитом ротора 11, образуют отталкивающее взаимодействие. В зависимости от направления смещения положения ротора под действием различных нагрузок датчик аксиального положения ротора 17 создает соответствующий сигнал. Данный сигнал через первый блок сравнения 18, который соединен с блоком задания 25 отрицательной связью, проходит через первый регулятор 19 к первому управляемому преобразователю 20. Помимо этого, сигнал от датчика аксиального положения ротора 17 через инвертор 21 попадает на второй блок сравнения 22, который так же, как и первый блок сравнения, соединен с блоком задания 25 отрицательной связью, проходит через второй регулятор 27 к второму управляемому преобразователю 28. В результате при возникновении отклонения положения ротора от заданного изменяются токи в обмотках управления 14,15, что приводит к стабилизации положения ротора.
Узел 8 работает полностью аналогично рассмотренному узлу 7.
По сравнению с известными предлагаемая магнитоэлектрическая опора имеет более простую конструкцию вследствие применения управления только в радиальном магнитном подшипнике, в то время как аксиальный магнитный подшипник упрощен до неуправляемой самостабилизирующейся конструкции на основе отталкивающих свойств постоянных магнитов. Помимо этого, в данной конструкции упрощена ортогональная система стабилизации радиального магнитного подшипника - она также заменена на самостабилизирующуюся конструкцию на основе отталкивающих свойств постоянных магнитов. В результате упрощения конструкции и системы управления достигается снижение момента сопротивления, уменьшение мощности управления, тем самым увеличение КПД данной магнитоэлектрической опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2013 |
|
RU2543054C1 |
| ФОНТАН ЭНЕРГОСБЕРЕГАЮЩИЙ | 2014 |
|
RU2579446C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| МАГНИТНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2575649C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| Универсальный каскадный многофазный аксиальный магнитоэлектрический генератор | 2017 |
|
RU2704805C2 |
| МАГНИТНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2507667C2 |
Изобретение относится к машиностроению, в частности к электромагнитным подвесам вращающихся роторов. Конструкция магнитоэлектрической опоры содержит два аналогичных узла, размещенных на оси магнитоэлектрической опоры, каждый из узлов содержит закрепленный на роторе постоянный кольцевой П-образный магнит, два установленных на статоре взаимно противоположно постоянных П-образных магнита, два установленных на статоре взаимно противоположно П-образных полюса, с размещенными на них первой и второй обмотками управления, при этом магнитные полюса постоянного кольцевого П-образного магнита и П-образных магнитов, установленных на роторе и статоре, сориентированы одноименно, вдоль оси магнитоэлектрической опоры на концах ротора и на статоре установлены постоянные магниты, полюса которых сориентированы одноименно. В систему управления каждым узлом магнитоэлектрической опоры введен инвертор, и выход датчика аксиального положения ротора подключен через первый вход первого блока сравнения и первый регулятор к входу первого управляемого преобразователя, а также через инвертор, первый вход второго блока сравнения и второй регулятор - к входу второго управляемого преобразователя, а вторые входы первого и второго блоков сравнения соединены с блоком задания. Технический результат - снижение момента сопротивления, уменьшение мощности управления и повышение КПД. 3 ил.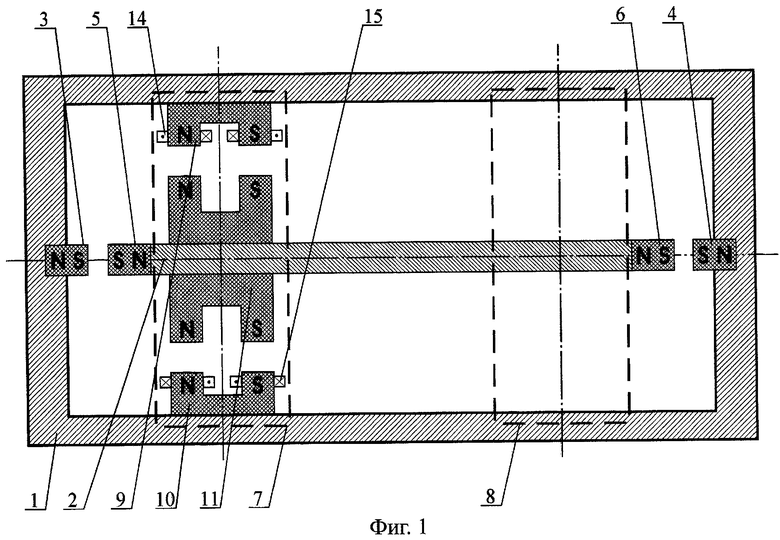
Магнитоэлектрическая опора, содержащая ротор и статор, расположенные на роторе постоянные кольцевые магниты, а также расположенные на статоре обмотки управления и систему управления, содержащую датчик аксиального положения ротора, блоки сравнения, регуляторы, блок задания, при этом расположенные на статоре обмотки управления соединены с источником питания и управляемыми преобразователями, отличающаяся тем, что в магнитоэлектрическую опору введены два аналогичных узла, размещенных на оси магнитоэлектрической опоры, каждый из узлов содержит закрепленный на роторе постоянный кольцевой П-образный магнит, два установленных на статоре взаимнопротивоположно постоянных П-образных магнита, два установленных на статоре взаимнопротивоположно П-образных полюса с размещенными на них первой и второй обмотками управления, при этом магнитные полюса постоянного кольцевого П-образного магнита и П-образных магнитов, установленных на роторе и статоре, сориентированы одноименно, вдоль оси магнитоэлектрической опоры на концах ротора и на статоре установлены постоянные магниты, полюса которых сориентированы одноименно, в систему управления каждым узлом магнитоэлектрической опоры введен инвертор, при этом выход датчика аксиального положения ротора подключен через первый вход первого блока сравнения и первый регулятор к входу первого управляемого преобразователя, а также через инвертор, первый вход второго блока сравнения и второй регулятор - к входу второго управляемого преобразователя, а вторые входы первого и второго блоков сравнения соединены с блоком задания.
| Магнитоэлектрическая опора | 1980 |
|
SU1051341A1 |
| Магнитоэлектрическая опора | 1980 |
|
SU1384848A1 |
| US 3243238 A, 29.03.1966. | |||

