Изобретение относится к грузозахватным устройствам, предназначенным для перегрузки контейнеров различных типоразмеров.
Известно захватное устройство (Авторское свидетельство СССР №1730000, кл. В 66 С 1/66, 12.02.1990 г.), содержащее раму, установленные на ней телескопические балки, снабженные захватными органами, и привод передвижения балок, включающий гидроцилиндр с двумя блоками на штоке, неподвижные блоки и один гибкий элемент, закрепленный на раме и последовательно огибающий один из блоков штока гидроцилиндра, блоки рамы и другой блок гидроцилиндра.
Однако это устройство из-за наличия гибкого элемента, который в процессе работы может вытянуться, не обеспечит надежность работы, т.к. может привести к заклиниванию захватных органов при выводе их из фитингов контейнера.
Наиболее близким аналогом по технической сущности является захватное устройство для грузовых контейнеров различной длины (DE 2119479 С3, кл. В 66 С 1/66, 21.04.1971 г.), содержащее несущую раму, установленные на ней телескопические балки, снабженные захватными органами и привод передвижения балок, состоящий из электродвигателя с редуктором, на выходных валах которого закреплены звездочки, а на балках закреплена цепь. Блокировочные приспособления, установленные на выдвижных балках, фиксируют ее длину в соответствии со стандартными размерами контейнеров, однако это не исключает разнос балок в любое другое положение с аварийным исходом.
Следовательно, недостатками этого устройства являются недостаточная надежность работы и сложность конструкции из-за наличия передаточных элементов в виде звездочек и закрепленной на балке цепи.
Задачей настоящего изобретения является упрощение конструкции и повышение надежности работы.
Эта задача решается за счет того, что в захватном устройстве для контейнеров, содержащем корпус коробчатой формы, выдвижные балки с прикрепленными к ним траверсами, снабженными поворотными замками и механизмами их поворота, привод передвижения балок, включающий в себя электродвигатель и редуктор, установленные на выдвижных балках рейки, и направляющие для выдвижных балок, установленные на корпусе устройства, привод передвижения балок снабжен кривошипно-шатунными механизмами, на тихоходных валах редуктора размещены шестерни, взаимодействующие посредством зубчатых соединений с кривошипами кривошипно-шатунных механизмов, кривошипы которых установлены на боковых стенках корпуса, а шатуны соответствующими концами шарнирно присоединены к ползунам, каждый из которых снабжен парой зубчатых колес, установленных жестко на оси, размещенной в корпусе ползуна таким образом, что малое зубчатое колесо взаимодействует с рейкой, установленной на направляющей ползуна, а большее - с рейкой, установленной на выдвижной балке и выполненной зубчатой, механизмы поворота замков включают в себя Г-образные приводные рычаги с осями поворота, размещенными параллельно продольной оси захватного устройства, причем один конец каждого рычага соединен посредством тяг с поворотными в горизонтальной плоскости рычагами замков, а другой конец этого рычага соединен с мерным грузом и гидротолкателем, причем одни из направляющих для выдвижных балок выполнены в виде роликов, имеющих пазы, а другие, размещенные в местах возникновения значительных нагрузок, - в виде пластин с пазами, пластины установлены с возможностью поперечного перемещения, при этом устройство снабжено сменными регулировочными планками для регулирования положения упомянутых пластин.
Изобретение поясняется чертежами, где:
на фиг.1 показано захватное устройство для контейнеров;
на фиг.2 - вид А (сверху) на фиг.1;
на фиг.3 - разрез Б-Б на фиг.1 (по кривошипу, шатун находится в промежуточном положении);
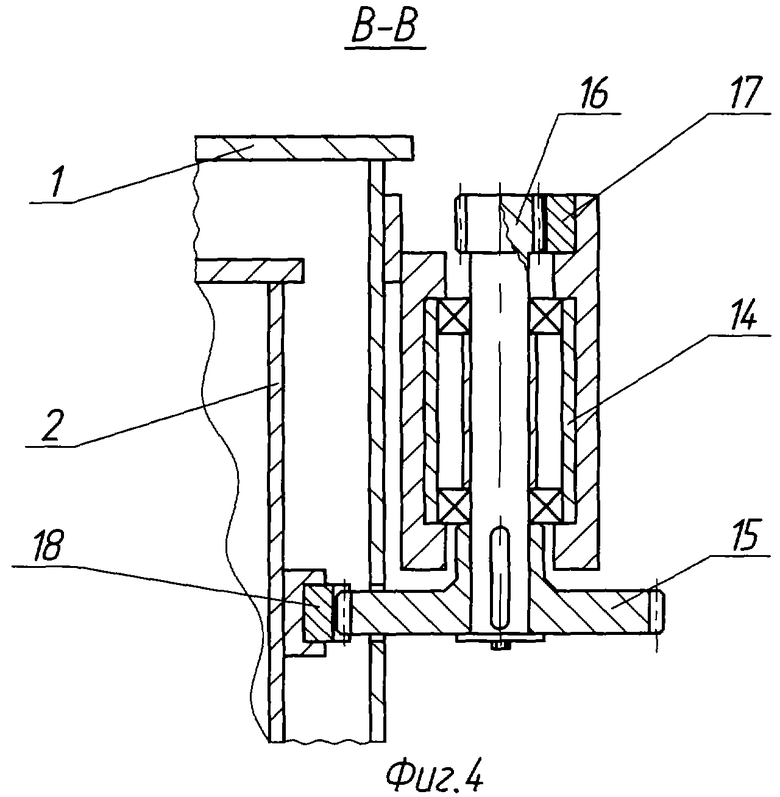
на фиг.4 - разрез В-В на фиг.1 (по ползуну);
на фиг.5 - разрез Г-Г на фиг.2 (по корпусу захвата);
на фиг.6 - разрез Д-Д на фиг.5 (по направляющей пластине);
на фиг.7 - вид Е (слева) на фиг.1;
на фиг.8 - вид Ж на фиг.7 (на рычаг поворотного замка);
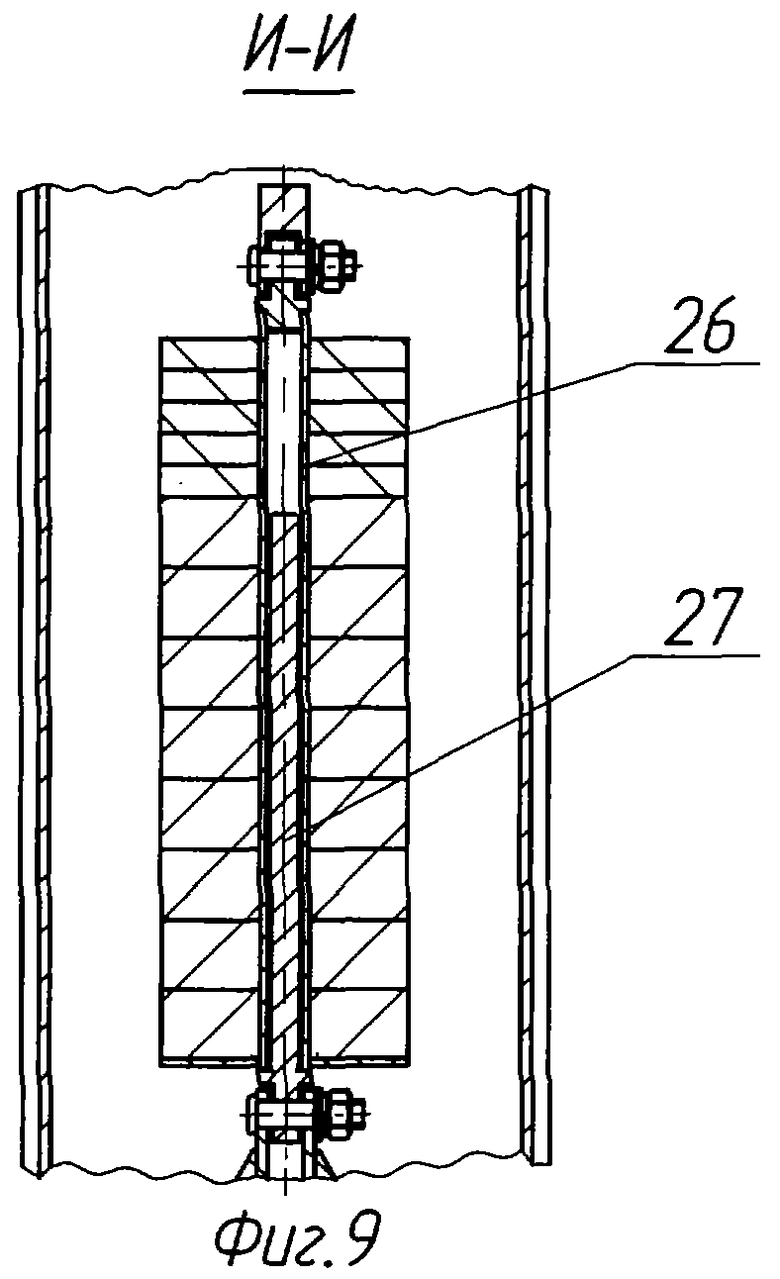
на фиг.9 - разрез И-И на фиг.7 (по грузу).
Захватное устройство для контейнеров (фиг.1 и 2) содержит корпус 1 коробчатой формы, выдвижные балки 2 с прикрепленными к ним траверсами 3, снабженные поворотными замками 4 для сцепления с контейнером. Привод передвижения балок, состоящий из электродвигателя 5 и редуктора 6, смонтирован на регулируемой по высоте плите 7, одна сторона которой шарнирно посредством кронштейна 8 соединена с корпусом 1, а другая - посредством закрепленных на корпусе 1 шарнирных болтов 9 и гаек 10. На тихоходных валах редуктора 6 (фиг.3) крепятся шестерни 11, которые посредством зубчатых зацеплений взаимодействуют с кривошипами 12, установленными на боковых стенках корпуса 1. На расчетном расстоянии r от оси кривошипа 12 одним своим концом с ним шарнирно соединяется шатун 13, который другим своим концом также шарнирно присоединяется к ползуну 14. Ползун 14 (фиг.4) снабжен парой зубчатых колес (большим 15 и малым 16 - передаточное отношение зубчатых передач колес равно 4:1), установленных жестко на оси, причем малое колесо 16 взаимодействует с рейкой, установленной на направляющей ползуна 14, а большое колесо 15 - с рейкой 18, установленной на выдвижной балке 2, движение которых происходит по направляющим роликам 19 и пластинам 20 (фиг.5). При этом регулировка положения пластины 20 производится планкой 21 (фиг.6).
Механизм поворота замков 4 для сцепления с контейнером (фиг.7) представляет собой Г-образный приводной рычаг 22, один конец которого шарнирно закреплен (фиг.8) с рычагами 23 поворотных замков 4 при помощи тяг 24, а другой конец рычага 22 соединен с мерным грузом 25, представляющим собой (фиг.9) наборные плиты и установленный на стержне 26, шарнирно соединенным с рычагом 22 и свободно перемещающийся по другому стержню 27, который шарнирно крепится на траверсе 3. Приводной рычаг 22 приводится в действие при помощи шарнирно прикрепленного к нему гидротолкателя 28, установленного также шарнирно на основании траверсы 3 на расчетном расстоянии от груза. Ось поворота приводного рычага 29, размещенная в месте излома, расположена на траверсе 3 параллельно продольной оси захватного устройства.
Захватное устройство работает следующим образом. В сдвинутом положении балок 2 осуществляется захват контейнеров меньшей длины (L=6058 мм - длина контейнера).
Для выполнения погрузочно-разгрузочных работ с большими контейнерами (L=12192 мм) балки 2 выдвигают в противоположных направлениях из корпуса 1. Для этого от электродвигателя 5 вращение посредством зубчатых зацеплений передается на кривошип 12, который в свою очередь при помощи шарнирно закрепленного шатуна 13 приводит в действие ползун 14. При этом большое зубчатое колесо 15, находящееся в зацеплении с рейкой 18, установленной на выдвижной балке 2, выдвигает балку на расстояние, равное
с=а+b,
где а=2×r - расстояние, на которое перемещается шатун 13 при вращении кривошипа 12 на 180°, где
r=306,7 мм - плечо шатуна 13, тогда
a=2×306,7=613,4 мм;
b=4×а - расстояние, на которое ползун 14 перемещает балку 2 (передаточное отношение зубчатых передач равно 4:1); следовательно
с=5×а=3067 мм - в каждую сторону, а всего раздвижка балок 2 происходит на 6134 мм, т.е. на длину большого контейнера:
L=6058+6134=12192 мм,
где 6058 мм - длина малого контейнера.
Таким образом, малый ход шатуна 13 за счет передаточного отношения группы реечных передач (в данном случае 4:1) преобразуется в необходимый ход раздвижки балок 2. При дальнейшем вращении кривошипа 12 балки 2 возвращаются в исходное положение.
Следовательно, при такой конструкции отсутствует необходимость в стопорных приспособлениях, чем обеспечивается ее надежная работа.
Для застроповки контейнера, после установки балок 2 на нужный типоразмер, захватное устройство при помощи подпружиненных ловителей 30 центрируется по стенам контейнера так, чтобы в момент посадки его поворотные штыри 4 были сориентированы на верхние отверстия всех угловых фитингов. В исходном положении поворотные замки 4 находятся в положении "Закрыто". Поворот замков 4 в положение "Открыто" осуществляется от гидротолкателя 28, шток которого выдвигается до предела вверх, чем приводит в действие Г-образный рычаг 22, поворачивая его вокруг оси, который, в свою очередь, посредством тяг 24 поворачивает рычаги 23 поворотных замков 4 на 90°. При опускании захватного устройства поворотные замки 4 входят в отверстия фитингов контейнера. При обесточивании гидротолкателя 28 его шток опускается вниз под воздействием груза 25 и через систему рычагов-тяг поворотные замки 4 возвращаются в исходное положение, т.е. в положение "Закрыто". Происходит захват контейнера. Аналогично происходит отстроповка контейнера. Механизм поворота замков прост и надежен в работе, т.к. он оказывает электромеханическое воздействие на одно положение - "Открыто", а на положение "Закрыто" воздействует груз, не требующий за собой специального технического обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПРЕДЕР ТЕЛЕСКОПИЧЕСКИЙ | 2013 |
|
RU2533620C1 |
| Горизонтально-ковочная машина | 1983 |
|
SU1505657A1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Трюмная погрузочная машина | 1958 |
|
SU118325A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| ТЕЛЕЖКА ГРУЗОВАЯ КРАНОВ МОСТОВОГО ТИПА | 2005 |
|
RU2317246C2 |
| МИННЫЙ ЗАГРАДИТЕЛЬ | 1995 |
|
RU2092772C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2369515C2 |






Изобретение относится к грузозахватным устройствам. Согласно изобретению привод передвижения балок снабжен кривошипно-шатунными механизмами, на тихоходных валах редуктора размещены шестерни, взаимодействующие посредством зубчатых соединений с кривошипами кривошипно-шатунных механизмов, кривошипы которых установлены на боковых стенках корпуса. Шатуны соответствующими концами шарнирно присоединены к ползунам, каждый из которых снабжен парой зубчатых колес, установленных жестко на оси, размещенной в корпусе ползуна таким образом, что малое зубчатое колесо взаимодействует с рейкой, установленной на направляющей ползуна, а большее - с рейкой, установленной на выдвижной балке и выполненной зубчатой. Механизмы поворота замков включают в себя Г-образные приводные рычаги с осями поворота, размещенными параллельно продольной оси захватного устройства, причем один конец каждого рычага соединен посредством тяг с поворотными в горизонтальной плоскости рычагами замков, а другой конец этого рычага соединен с мерным грузом и гидротолкателем. Одни из направляющих для выдвижных балок выполнены в виде роликов, имеющих пазы, а другие, размещенные в местах возникновения значительных нагрузок, - в виде пластин с пазами, пластины установлены с возможностью поперечного перемещения, при этом устройство снабжено сменными регулировочными планками для регулирования положения упомянутых пластин. Изобретение обеспечивает повышение надежности. 9 ил.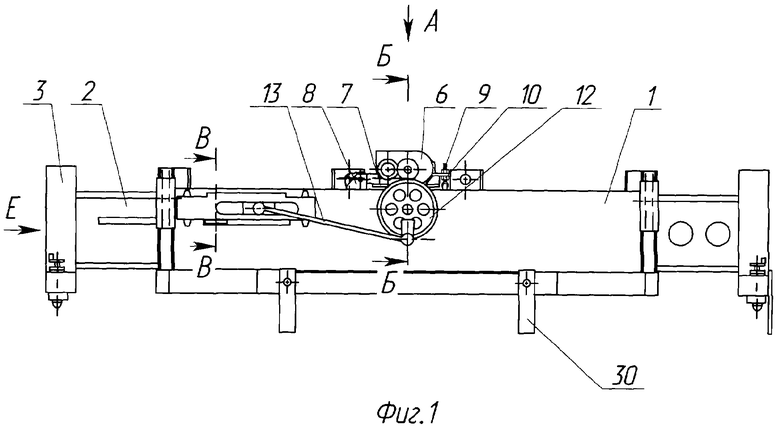
Захватное устройство для контейнеров, содержащее корпус коробчатой формы, выдвижные балки с прикрепленными к ним траверсами, снабженными поворотными замками и механизмами их поворота, привод передвижения балок, включающий в себя электродвигатель и редуктор, установленные на выдвижных балках рейки, и направляющие для выдвижных балок, установленные на корпусе устройства, отличающееся тем, что привод передвижения балок снабжен кривошипно-шатунными механизмами, на тихоходных валах редуктора размещены шестерни, взаимодействующие посредством зубчатых соединений с кривошипами кривошипно-шатунных механизмов, кривошипы которых установлены на боковых стенках корпуса, а шатуны соответствующими концами шарнирно присоединены к ползунам, каждый из которых снабжен парой зубчатых колес, установленных жестко на оси, размещенной в корпусе ползуна таким образом, что малое зубчатое колесо взаимодействует с рейкой, установленной на направляющей ползуна, а большее - с рейкой, установленной на выдвижной балке и выполненной зубчатой, механизмы поворота замков включают в себя Г-образные приводные рычаги с осями поворота, размещенными параллельно продольной оси захватного устройства, причем один конец каждого рычага соединен посредством тяг с поворотными в горизонтальной плоскости рычагами замков, а другой конец этого рычага соединен с мерным грузом и гидротолкателем, причем одни из направляющих для выдвижных балок выполнены в виде роликов, имеющих пазы, а другие, размещенные в местах возникновения значительных нагрузок, - в виде пластин с пазами, пластины установлены с возможностью поперечного перемещения, при этом устройство снабжено сменными регулировочными планками для регулирования положения упомянутых пластин.
| АРИЛОКСИЦИКЛОАЛКЕНИЛ- И АРИЛОКСИИМИНОЦИКЛОАЛКЕНИЛГИДРОКСИМОЧЕВИНЫ И ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ, ИНГИБИРУЮЩАЯ 5-ЛИПОКСИГЕНАЗУ | 1995 |
|
RU2119479C1 |
| Захватное устройство для контейнеров | 1980 |
|
SU906901A1 |
| Захватное устройство для контейнеров | 1990 |
|
SU1730000A1 |
| Траверса | 1988 |
|
SU1636320A1 |

