захватный орган. Электрода гадатель вращает шестерни 15, которые поворачивают кривошипы 17 и шатуны 18. Связанные с кар етками 5 шатуны обеспечивают перемещение кареток с заготовками к зоне обработки. При подходе к зоне обработки начинается выстой кривошипно-шатунных механизмов. В это время кулачок 31, воздействуя на шарнирно-рычажный механизм перемещения направляющих опорных элементов
Изобретение относится к транспортирующим устройствам, предназначенным дпя перемещения щтучных заготовок между технологическими машинами, пре- имущественно прессами.
Цель изобретения - расширение технологических возможностей за счет обеспечения шаговой подачи тяжелых дпинномерных заготовок.
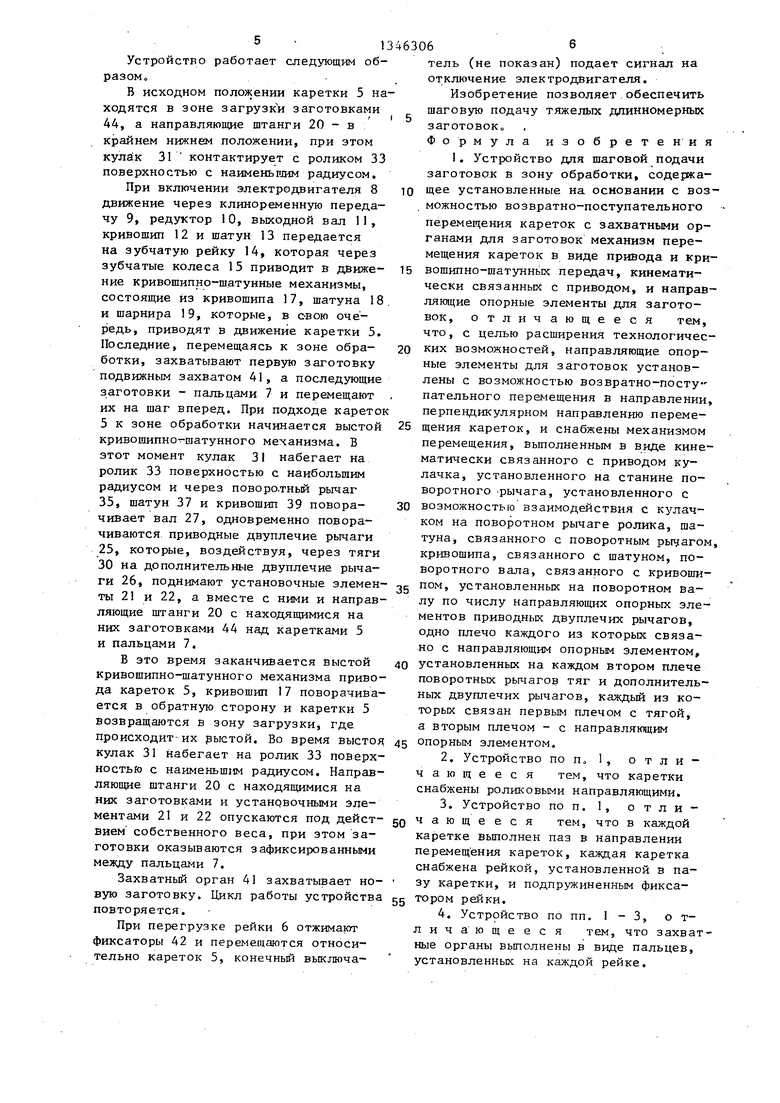
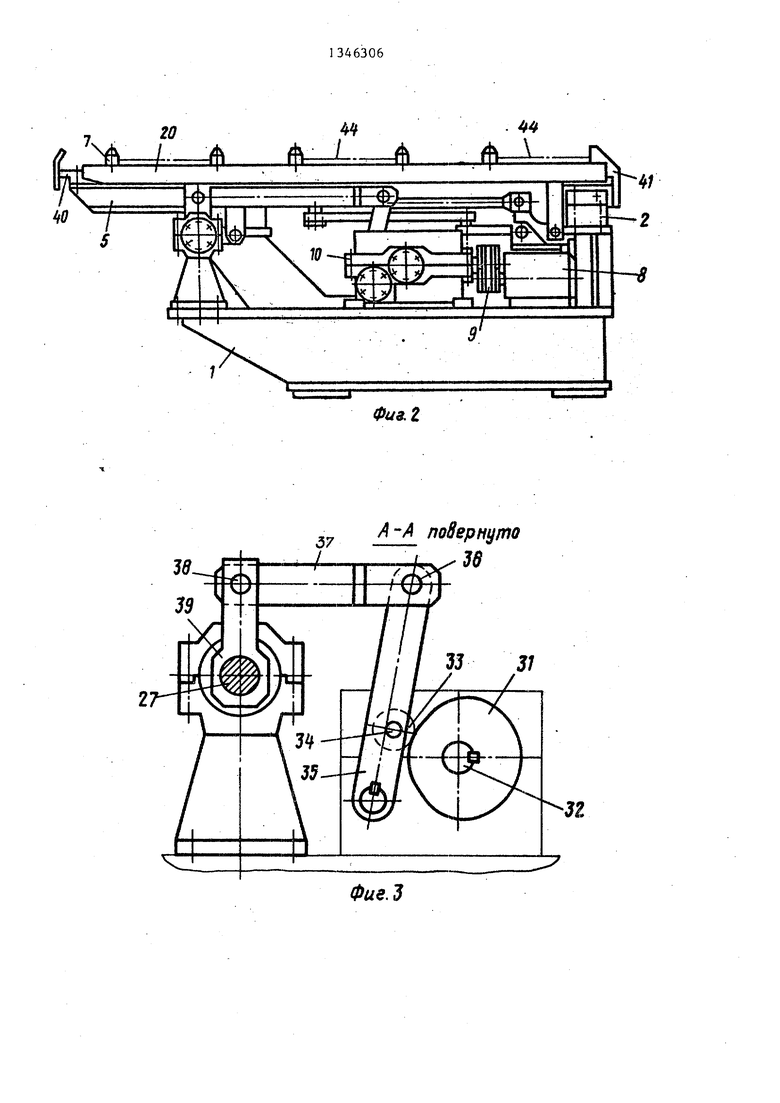
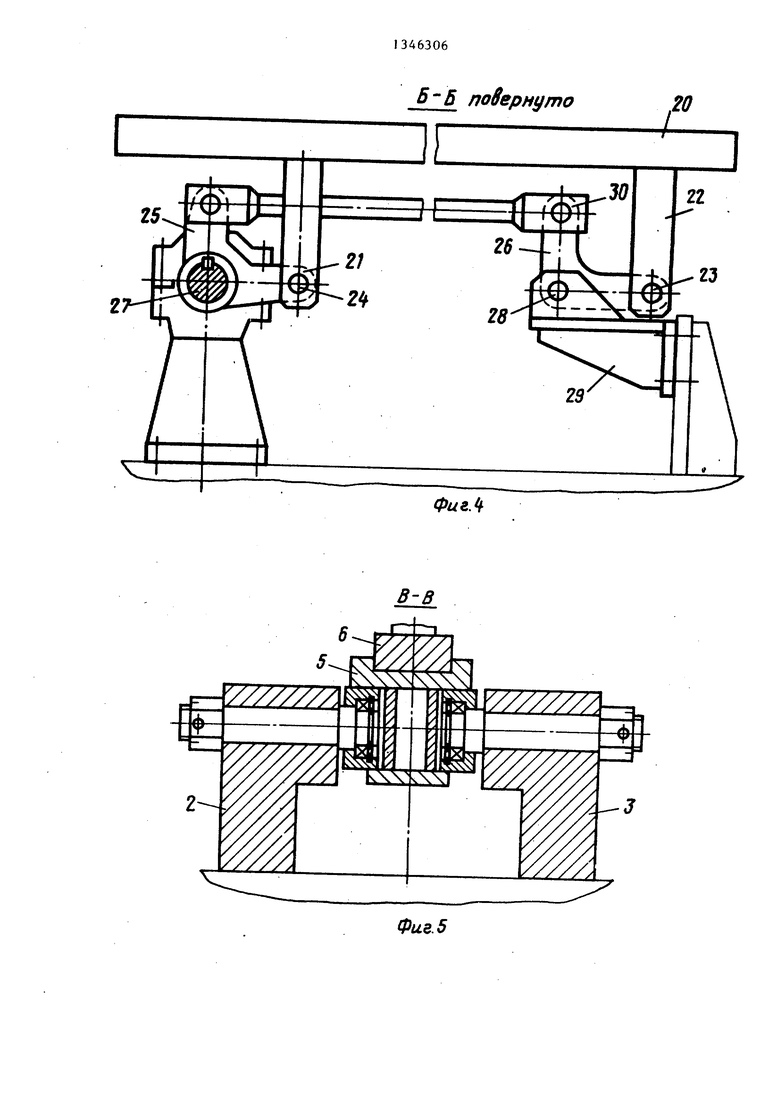
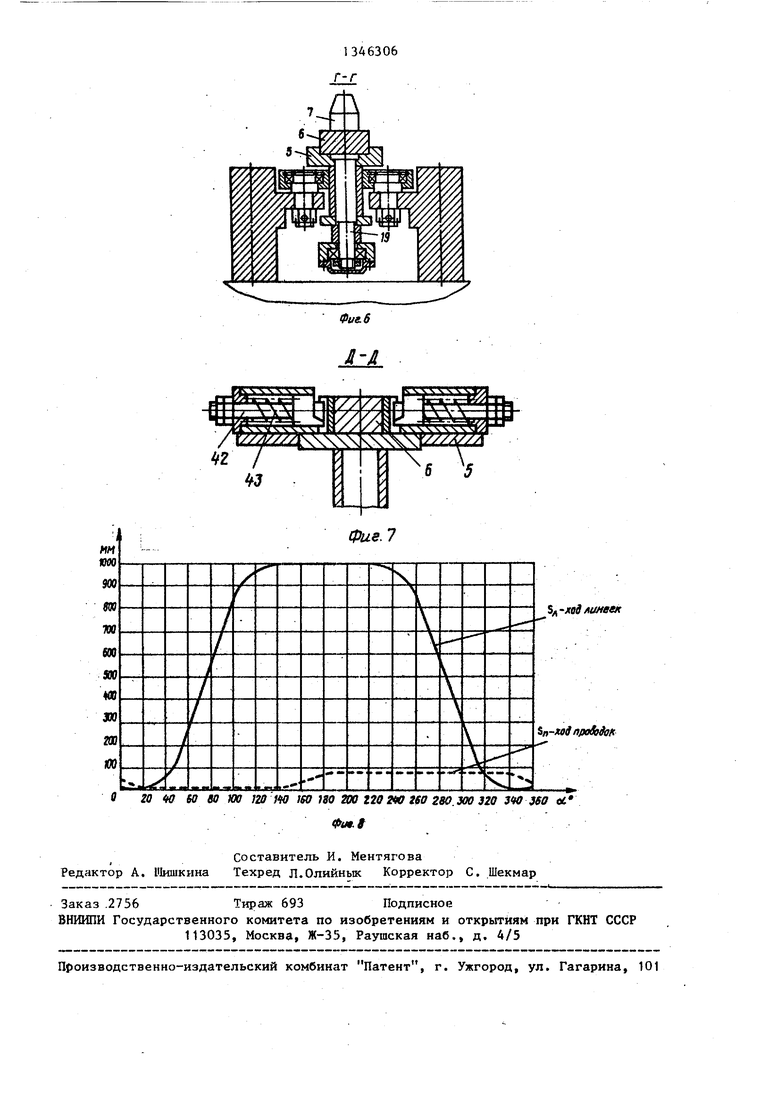
На фиг. 1 показано предлагаемое устройство, вид в плане; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. ; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиГо 1; на фиг. 6 разрез Г-Г на фиг. 1; на фиг. 7 - разрез :Д-Днафиг.1; на фиг. 8 - совмещенный график перемещения кареток и опорных элементов,
Устройство дпя шаговой подачи заготовок содержит основание 1, роликовые направляющие 2-4, в которых возвратно-поступательно перемещаются каретки 5 с роликами и захватными органами, выполненными в виде пальцев 7, закрепленных в рейках 6. Привод кареток 5 состоит из электродвигателя 8, клиноременной передачи 9, редуктора 10, на выходном валу 11 которого установлен кривошип 12, сообщающий возвратно-поступательное перемещение через шатун 13 составной зубчатой рейке 14. Зубчатая рейка передает движение на зубчатые колеса 15, ус тановленные на вертикальных валах 16 кривошипно-шатунных механизмов возвратно-поступательного перемещения в направлении подачи кареток 5, каж
46306
20, поднимает последние. Направляющие опорные элементы 20 .поднимают заготовки над каретками. Шарнирно-ры- чажные механизмы, поворачиваясь в обратную сторону, возвращают каретки в зону загрузки, а кулачок 31 опускает направлякяцие опорные элементы 20 с заготовками, которые попадают в следующий захватный орган (между пальцами 7) каретки 5. 3 з.п. ф-лы, 8 ил.
,
5 0
35
5
дьй из которых состоит из кривошипа 17 и шатуна 18, соединенного посред - ством гаарнира 19 (фиг. 6) с каретками 5. Направляющие спорные элементы дпя заготовок состоят из подвижных направляющих штанг 20, в нижней части которых по краям жестко закреплены установочные элементы 21 и 22 (фиГо 4), сочлененные посредством шарниров 23, 24 с двуплечими рычагами 25 и 26. При.этом двуплечие рычаги 25 установлены на валу 27, а двуплечие рычаги 26 - на осях 28, смонти рованных в кронштейнах 29. Другие концы двуплечих рычагов 25 и 26 шарнирно соединены с тягами 30. Механизм перемещения направляющих штанг 20 состоит из кулака 31, установленного на дополнительном валу 32 редуктора 10 привода кареток 5, взаимодействующего с роликом 33, установленным на оси 34 поворотного рычага 35, Поворотный рычаг шарниром 36 связан с шатуном 37, который в свою ачередь, посредством шарнира 38 связан с .кривошипом 39, закрепленньм на валу 27, I
Каретки 5 на конце, обращенном к
зоне обработки, имеют регулируемые толкатели 40, а на противоположном конце - регулируемые утопающие захватные органы 41. Дпя предотвраще- ния поломки механизма при аварийной ситуации рейки 6 установлены в пазах кареток 5 с возможностью перемещения и удерж юаются фиксаторами 42 (Фиго 7), входящими в соответствующие пазы реек 6, Фиксаторы 42 подпружинены пружинами 43.
5 - J3
Устройство работает следующим образом.
В исходном положении каретки 5 находятся в зоне загрузки заготовками 44, а направляющие штанги 20 - в : крайнем нижнем положении, при этом кулак 31 контактирует с роликом 33 поверхностью с наименьшим радиусом.
При включении электродвигателя 8 движение через клиноременную передачу 9, редуктор 10, выходной вал 11, кривошип 12 и шатун 13 передается на зубчатую рейку 14, которая через зубчатые колеса 15 приводит в движение кривошипно-шатунные механизмы, состоящие из кривошипа 17, шатуна 18 и шарнира 19, которые, в с-вою очередь, приводят в движение каретки 5. Последние, перемещаясь к зоне обработки, захватывают первую заготовку подвижным захватом 41, а последующие заготовки - пальцами 7 и перемещают их на щаг вперед. При подходе кареток 5 к зоне обработки начинается выстой кривошипнот-шатунного механизма. В этот момент кулак 31 набегает на ролик 33 поверхностью с наибольшим радиусом и через поворо.тньй рычаг 35, шатун 37 и кривошип 39 поворачивает вал 27, одновременно поворачиваются приводные двуплечие рычаги 25, которые, воздействуя, через тяги 30 на дополнительные двуплечие рычаги 26, поднимают установочные элементы 21 и 22, а вместе с ними и направляющие штанги 20 с находящимися на них заготовками 44 над каретками 5 и пальцами 7.
В это время заканчивается выстой кривошипно-шатунного механизма привода кареток 5, кривошип 17 поворачивается в обратную сторону и каретки 5 возвращаются в зону загрузки, где происходит-их рыстой. Во время выстоя кулак 31 набегает на ролик 33 поверхностью с наименьшим радиусом. Направляющие штанги 20 с находящимися на них заготовками и установочными элементами 21 и 22 опускаются под действием собственного веса, при этом заготовки оказываются зафиксированными между пальцами 7.
Захватный орган 41 захватывает новую заготовку. Цикл работы устройства повторяется.
При перегрузке рейки 6 отжимают фиксаторы 42 и перемещаются относительно кареток 5, конечный выключа63066
тель (не показан) подает сигнал на отключение электродвигателя.
Изобретение позволяет.обеспечить шаговую подачу тяжелых дпинномерных заготовок Формула изобретения
1. Устройство для шаговой подачи заготовок в зону обработки, содержа- 10 щее установленные на основании с возможностью возвратно-поступательного
перемещения кареток с захватными органами для заготовок механизм перемещения кареток в виде привода и кри- 15 вошипно-шатунньк передач, кинематически связанных с приводом, и направляющие опорные элементы для заготовок,
о тлич ающе еся
тем,
что, с целью расширения технологических возможностей, направляющие опорные элементы для заготовок установлены с возможностью возвратно-посту нательного перемещения в направлении, перпендикулярном направлению перемещения кареток, и снабжены механизмом перемещения, выполненным в виде кинематически связанного с приводом кулачка, установленного на станине поворотного фычага, установленного с
возможностью взаимодействия с кулачком на поворотном рычаге ролика, ша- туна связанного с поворотным рыуагом, кривошипа, связанного с шатуном, поворотного вала, связанного с кривоши-
пом, установленных на поворотном валу по числу направляющих опорных элементов приводных двуплечих рычагов, одно плечо каждого из которых связано с направляющим опорным элементом,
установленных на каждом втором плече поворотных рычагов тяг и дополнительных двуплечих рычагов, каждый из которых связан первым плечом с тягой, а вторым плечом - с направлякщим
Опорным элементом,
2.Устройство по По 1, отличающееся тем, что каретки снабжены роликовыми направляющими.
3.Устройство по п. 1, о т л и - чающееся тем, что в каждой
каретке выполнен паз в направлении перемещения кареток, каждая каретка снабжена рейкой, установленной в пазу каретки, и подпружиненным фикса- тором рейки.
4.Устройство по пп. 1-3, отличающееся тем, что захватные Органы вьтолнены в виде пальцев, установленных на каждой рейке.
го
Фиа.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для горячей высадки головок болтов | 1988 |
|
SU1606250A1 |
| Устройство для транспортировки листового материала вдоль линии прессов | 1975 |
|
SU555951A1 |
| ВОЛОЧИЛЬНЫЙ СТАН | 1994 |
|
RU2090280C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU899210A1 |
| Плоскошлифовальный автоматический комплекс для двусторонней обработки деталей | 1988 |
|
SU1657372A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ЛЕНТЬ[ | 1967 |
|
SU190254A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
Изобретение относится к транспортирующим устройствам, предназначенным для перемещения штучных заготовок между технологическими машинами, преимущественно прессами. Целью изобретения является распшрение технологических возможностей за счет обеспечения шаговой подачи тяжелых длинномерных-заготовок. Заготовки загружают в -зоне загрузки в первый (Л с 4 О5 со Фил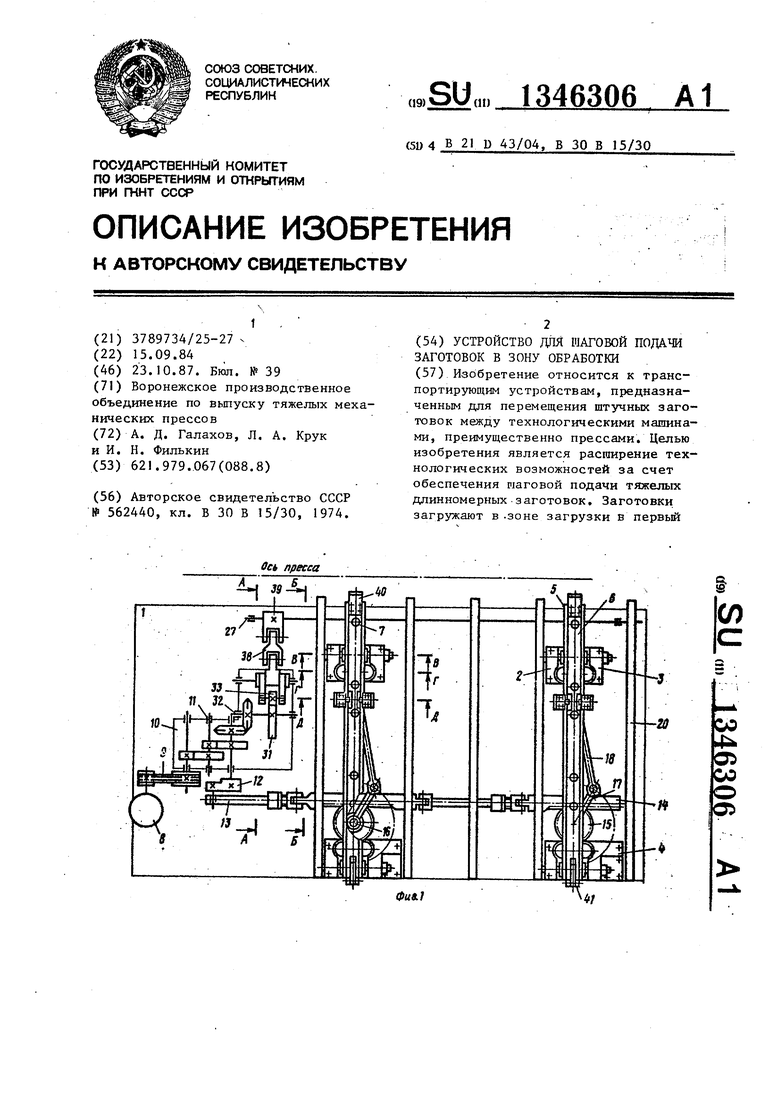
37 ло8ерну/по У .. ./..Jg
Фие.
Б-5 повернуто
.20
25
ег
.JO
22
гъ
Фиг А
Фиг.5
Фиг. б
Фие. 7
го w 60 т юо w т т iso 200 гго sw гво гво.зоо зго 3w з$о ос
Фм.
Составитель И. Ментягова Редактор А, 1Чишкина Техред Л.Олийнык Корректор С, Шекмар
-яод линеек
n-Mi npoSoioK
Заказ .2756Тираж 693 Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
| Устройство для периодического перемещения штучных заготовок | 1974 |
|
SU562440A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| ffet пресса | |||
