Изобретение относится к устройствам для физической разминки и может быть использовано в переносных мини-тренажерах.
В современных условиях задача снижения последствий гиподинамии является наиболее актуальной для обеспечения здоровья населения всех возрастных категорий. Известно большое количество тренажеров, обеспечивающих физическую разминку в качестве средства снижения последствий гиподинамии.
Известен переносной мини-тренажер для физической разминки рук и ног, содержащий круглый кожух, внутри которого размещено фрикционное вращающееся нагрузочное устройство, к которому с двух сторон присоединены откидные элементы, посредством которых нагрузочное устройство приводится во вращение с помощью рук и ног. Тренажер удобен при перевозке и может быть установлен на любой плоской поверхности, однако пользователь не может использовать его, если сам находится в движении. Кроме того, это устройство обеспечивает только один вид физической нагрузки (патент US 5490824 А, кл. А 63 В 22/06, 13.02.1996).
Известен также тренажер для физической разминки, содержащий корпус, внутри которого установлено реверсивное вращающееся нагружающее устройство, систему передачи усилия на нагружающее устройство с гибким рабочим органом, включающую шкив, взаимодействующий со шкивом незамкнутый гибкий рабочий орган с захватами, выходные ролики и средство крепления на опоре (патент US 5755650 А, кл. А 63 В 21/00, 1998). Данный тренажер конструктивно связан с креслом, что исключает возможность использования его в качестве переносного, при этом схема нагружения обеспечивает только одно движение руками.
Известен переносной мини-тренажер для физической разминки, содержащий корпус, средство для крепления на объекте, включающее, по меньшей мере две лямки, присоединенные к корпусу, нагружающее устройство с незамкнутым гибким рабочим органом, на концах которого закреплены захваты, и систему передачи усилия на нагружающее устройство, включающую выходные обводные ролики (патент US 5234394 А, кл. А 63 В 21/00, 10.08.1993). Данный тренажер закреплен на стуле и для того, чтобы использовать его при движении, необходимо разъединить узлы крепления, что требует дополнительных усилий и времени.
Задачей изобретения является расширение функциональных и эксплуатационных возможностей тренажера, повышение удобства в его использовании путем создания переносного мини-тренажера для физической разминки, обеспечивающего его использование как во время прогулки с креплением его за спиной, так и в стационарных условиях с креплением его на любой опоре, например на спинке кресла, стволе дерева, позволяя организовать дополнительную физическую нагрузку для мышц рук. Кроме того, конструкция тренажера должна обеспечить надежность и безопасность пользователю при выполнении физических упражнений.
Указанный технический результат достигается за счет того, что переносной мини-тренажер для физической разминки, содержащий корпус, средство для крепления на объекте, включающее, по меньшей мере, две лямки, присоединенные к корпусу, нагружающее устройство с незамкнутым гибким рабочим органом, на концах которого закреплены захваты, и систему передачи усилий на нагружающее устройство, включающую выходные обводные ролики, выполнен в виде автономного модуля, внутри корпуса которого размещено реверсивное вращающееся нагружающее устройство. Переносной мини-тренажер в виде автономного модуля может быть выполнен в трех вариантах.
В одном варианте система передачи усилия на реверсивное вращающееся нагружающее устройство, размещенное в корпусе автономного модуля, включает связанный с нагружающим устройством шкив, с которым взаимодействует незамкнутый гибкий рабочий орган, на концах которого закреплены захваты, например захваты для рук.
Модуль имеет две поворотные опоры, каждая поворотная опора имеет свой корпус, внутри которого установлен один из выходных обводных роликов.
В боковой стенки корпуса опоры выполнены два отверстия для пропуска гибкого рабочего органа. К корпусу поворотной опоры соосно первому отверстию присоединена направляющая втулка, а соосно второму отверстию - пустотелая цапфа, установленная в автономном модуле на подшипниках.
В каждой поворотной опоре гибкий рабочий орган пропущен через направляющую втулку и пустотелую цапфу и охватывает частично или полностью установленный в поворотной опоре выходной обводной ролик.
По меньшей мере, один захват снабжен накопителем гибкого рабочего органа, фиксатором длины гибкого рабочего органа и устройством для подтягивания гибкого рабочего органа.
Средство для крепления автономного модуля на объекте включает, по меньшей мере, две лямки, присоединенные к корпусу автономного модуля.
Указанный шкив целесообразно закрепить на валу нагружающего устройства, гибкий рабочий орган выполнить в виде тросика, а каждый выходной обводной ролик снабдить периферийной канавкой глубиной больше, чем диаметр тросика. При этом выходной обводной ролик устанавливается в корпусе поворотной опоры с зазором относительно боковой стенки, меньшим половины диаметра тросика.
Предпочтительно, захват для руки оснащен охватывающим гибкий рабочий орган сужающимся полым наконечником, а в направляющей втулке корпуса поворотной опоры выполнено ответное гнездо.
Предпочтительно, указанный корпус тренажера имеет плоские боковые стенки, уплощенную опорную поверхность и фронтальную поверхность. В нерабочем положении захваты для рук расположены вдоль плоских боковых стенок корпуса. На уплощенной опорной поверхности корпуса закреплен слой из деформируемого материала.
Предпочтительно, в средстве для крепления мини-тренажера на объекте лямки закреплены на корпусе автономного модуля вдоль кромок уплощенной опорной поверхности. При этом средство для крепления мини-тренажера на объекте имеет, по крайней мере, две первые лямки, каждая из которых закреплена на корпусе автономного модуля в зоне размещения поворотных опор, и, по крайней мере, две вторые лямки, закрепленные на верхней части корпуса автономного модуля, при этом первые лямки оснащены пряжкой для фиксации их свободных концов и двумя устройствами фиксации свободных концов вторых лямок.
Предпочтительно, мини-тренажер оснащен мягкими защитными накладками, закрепленными на корпусе автономного модуля в зоне размещения поворотных опор.
В рабочем положении первые лямки охватывают объект с боковых сторон и их концы соединены между собой, а вторые лямки охватывают объект сверху и их свободные концы присоединены к первым лямкам, а мягкие защитные накладки охватывают объект поверх лямок и их свободные кромки соединены между собой. В нерабочем положении первые лямки охватывают снаружи захваты для рук и фронтальную поверхность корпуса и их концы соединены между собой, а вторые лямки охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
В нерабочем положении мягкие защитные накладки охватывают снаружи захваты для рук и фронтальную поверхность корпуса и их свободные кромки соединены между собой, первые лямки охватывают снаружи захваты для рук и фронтальную поверхность корпуса поверх мягких защитных накладок и их концы соединены между собой, а вторые лямки охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
Реверсивное вращающееся нагружающее устройство может быть выполнено в виде механического нагружающего устройства или электрического генератора, а также в виде гидравлического или пневматического нагружающего устройства, при этом, предпочтительно, гидравлическое нагружающее устройство оснащено перистальтическим насосом, полости которого соединены между собой через регулируемое гидравлическое сопротивление, а пневматическое нагружающее устройство оснащено перистальтическим компрессором, полости которого соединены с атмосферой через параллельно установленные регулируемое гидравлическое сопротивление и обратный клапан.
Чтобы выполнить поставленные задачи полностью или частично далее предлагается второй вариант переносного мини-тренажера для физической разминки, включающий в себя:
(а) автономный модуль, содержащий:
- корпус;
- реверсивное вращающееся нагружающее устройство, установленное внутри указанного корпуса;
- систему передачи усилия на нагружающее устройство с гибким рабочим органом, включающую в себя шкив, связанный с нагружающим устройством, взаимодействующий со шкивом незамкнутый гибкий рабочий орган, на концах которого закреплены захваты, например захваты для рук, и промежуточные и выходные обводные ролики;
- две поворотные опоры, каждая указанная поворотная опора имеет свой корпус, внутри которого установлен один из указанных выходных обводных роликов, а в боковой стенке корпуса опоры выполнены два отверстия для пропуска гибкого рабочего органа, к корпусу поворотной опоры соосно первому отверстию присоединена направляющая втулка, а соосно второму отверстию - пустотелая цапфа, установленная в автономном модуле на подшипниках, при этом промежуточные обводные ролики размещены между пустотелыми цапфами и шкивом, и гибкий рабочий орган между двумя пустотелыми цапфами последовательно огибает частично или полностью промежуточный обводной ролик, шкив и еще раз промежуточный обводной ролик, а в каждой поворотной опоре гибкий рабочий орган пропущен через направляющую втулку и пустотелую цапфу и охватывает частично или полностью установленный в поворотной опоре выходной обводной ролик;
- по меньшей мере, один указанный захват снабжен накопителем гибкого рабочего органа, фиксатором длины гибкого рабочего органа и устройством для подтягивания гибкого рабочего органа;
(б) средство для крепления указанного автономного модуля на объекте, оснащенное, по крайней мере, двумя лямками, присоединенными к корпусу автономного модуля.
Предпочтительно, указанная система передачи усилия снабжена двумя промежуточными обводными роликами. При этом шкив закреплен на валу нагружающего устройства, гибкий рабочий орган выполнен в виде тросика, а каждый выходной обводной ролик имеет периферийную канавку глубиной больше, чем диаметр тросика. Выходной обводной ролик установлен в корпусе поворотной опоры с зазором относительно боковой стенки, меньшим половины диаметра тросика.
Предпочтительно, захват для руки оснащен охватывающим гибкий рабочий орган сужающимся полым наконечником, а в направляющей втулке корпуса поворотной опоры выполнено ответное гнездо.
Предпочтительно, корпус мини-тренажера имеет плоские боковые стенки, уплощенную опорную поверхность и фронтальную поверхность. В нерабочем положении захваты для рук расположены вдоль плоских боковых стенок корпуса. Предпочтительно, на уплощенной опорной поверхности корпуса закреплен слой из деформируемого материала.
Предпочтительно, в указанном средстве для крепления мини-тренажера на объекте лямки закреплены на корпусе автономного модуля вдоль кромок уплощенной опорной поверхности. При этом средство для крепления мини-тренажера на объекте имеет, по крайней мере, две первые лямки, каждая из которых закреплена на корпусе автономного модуля в зоне размещения поворотных опор, и, по крайней мере, две вторые лямки, закрепленные на верхней части корпуса автономного модуля, при этом первые лямки оснащены пряжкой для фиксации их свободных концов и двумя устройствами фиксации свободных концов вторых лямок.
Предпочтительно, мини-тренажер оснащен мягкими защитными накладками, закрепленными на корпусе автономного модуля в зоне размещения поворотных опор.
В рабочем положении первые лямки охватывают объект с боковых сторон и их концы соединены между собой, а вторые лямки охватывают объект сверху и их свободные концы присоединены к первым лямкам.
Предпочтительно, в рабочем положении первые лямки охватывают объект с боковых сторон и их концы соединены между собой, а вторые лямки охватывают объект сверху и их свободные концы присоединены к первым лямкам, а мягкие защитные накладки охватывают объект поверх лямок и их свободные кромки соединены между собой.
В нерабочем положении первые лямки охватывают снаружи захваты для рук и фронтальную поверхность корпуса и их концы соединены между собой, а вторые лямки охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
Предпочтительно, в нерабочем положении мягкие защитные накладки охватывают снаружи захваты для рук и фронтальную поверхность корпуса и их свободные кромки соединены между собой, первые лямки охватывают снаружи захваты для рук и фронтальную поверхность корпуса поверх мягких защитных накладок и их концы соединены между собой, а вторые лямки охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
Реверсивное вращающееся нагружающее устройство может быть выполнено в виде механического нагружающего устройства или электрического генератора, а также в виде гидравлического или пневматического нагружающего устройства, при этом, предпочтительно, гидравлическое нагружающее устройство оснащено перистальтическим насосом, полости которого соединены между собой через регулируемое гидравлическое сопротивление, а пневматическое нагружающее устройство оснащено перистальтическим компрессором, полости которого соединены с атмосферой через параллельно установленные регулируемое гидравлическое сопротивление и обратный клапан.
Чтобы выполнить поставленные задачи полностью или частично далее предлагается еще один вариант переносного мини-тренажера для физической разминки, включающего в себя:
(а) автономный модуль, содержащий:
- корпус;
- реверсивное вращающееся нагружающее устройство, установленное внутри указанного корпуса;
- систему передачи усилия на нагружающее устройство с гибким рабочим органом, включающую в себя две нагружающие цепочки, размещенные с противоположных сторон нагружающего устройства;
- четыре поворотные опоры, размещенные попарно с двух сторон относительно нагружающего устройства;
- каждая нагружающая цепочка включает в себя:
- шкив, связанный с нагружающим устройством, взаимодействующий со шкивом незамкнутый гибкий рабочий орган, на концах которого закреплены захваты, например захваты для рук, и промежуточные и выходные обводные ролики;
- по меньшей мере, один указанный захват снабжен накопителем гибкого рабочего органа, фиксатором длины гибкого рабочего органа и устройством для подтягивания гибкого рабочего органа;
- каждая указанная поворотная опора имеет свой корпус, внутри которого установлен один из указанных выходных обводных роликов, а в боковой стенке корпуса опоры выполнены два отверстия для пропуска гибкого рабочего органа, к корпусу поворотной опоры соосно первому отверстию присоединена направляющая втулка, а соосно второму отверстию - пустотелая цапфа, установленная в автономном модуле на подшипниках;
- в каждой указанной нагружающей цепочке указанные промежуточные обводные ролики размещены между пустотелыми цапфами и шкивом;
- в каждой указанной нагружающей цепочке гибкий рабочий орган между двумя пустотелыми цапфами последовательно огибает частично или полностью промежуточный обводной ролик, шкив и еще раз промежуточный обводной ролик, а в каждой поворотной опоре гибкий рабочий орган пропущен через направляющую втулку и пустотелую цапфу и охватывает частично или полностью установленный в поворотной опоре выходной обводной ролик;
(б) средство для крепления указанного автономного модуля на объекте, оснащенное, по крайней мере, двумя лямками, присоединенными к корпусу автономного модуля.
Предпочтительно, оба шкива нагружающих цепочек закреплены на валу нагружающего устройства. Гибкий рабочий орган выполнен в виде тросика, а каждый выходной обводной ролик имеет периферийную канавку глубиной больше, чем диаметр тросика. Выходной обводной ролик установлен в корпусе поворотной опоры с зазором относительно боковой стенки, меньшим половины диаметра тросика.
Предпочтительно, захват для руки оснащен охватывающим гибкий рабочий орган сужающимся полым наконечником, а в направляющей втулке корпуса поворотной опоры выполнено ответное гнездо.
Предпочтительно, корпус мини-тренажера имеет плоские боковые стенки, уплощенную опорную поверхность и фронтальную поверхность. В нерабочем положении захваты для рук расположены вдоль плоских боковых стенок корпуса. На уплощенной опорной поверхности корпуса закреплен слой из деформируемого материала.
Предпочтительно, в средстве для крепления мини-тренажера на объекте лямки закреплены на корпусе автономного модуля вдоль кромок уплощенной опорной поверхности. При этом средство для крепления мини-тренажера на объекте имеет четыре первые лямки, каждая из которых закреплена на корпусе автономного модуля в зоне размещения поворотных опор, и, по крайней мере, две вторые лямки, закрепленные на верхней части корпуса автономного модуля, при этом каждая пара первых лямок оснащена пряжкой для фиксации их свободных концов, и, по крайней мере, одна пара первых лямок оснащена двумя устройствами фиксации свободных концов вторых лямок.
Предпочтительно, мини-тренажер оснащен мягкими защитными накладками, закрепленными на корпусе автономного модуля в зоне размещения поворотных опор.
В рабочем положении первые лямки охватывают объект с боковых сторон и их концы соединены между собой, а вторые лямки охватывают объект сверху и их свободные концы присоединены к первым лямкам.
Предпочтительно, в рабочем положении первые лямки охватывают объект с боковых сторон и их концы соединены между собой, а вторые лямки охватывают объект сверху и их свободные концы присоединены к первым лямкам, а мягкие защитные накладки охватывают объект поверх лямок и их свободные кромки соединены между собой.
В нерабочем положении первые лямки охватывают снаружи захваты для рук и фронтальную поверхность корпуса и их концы соединены между собой, а вторые лямки охватывают снаружи выпуклую фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
Предпочтительно, в нерабочем положении мягкие защитные накладки охватывают снаружи захваты для рук и фронтальную поверхность корпуса и их свободные кромки соединены между собой, первые лямки охватывают снаружи захваты для рук и фронтальную поверхность корпуса поверх мягких защитных накладок и их концы соединены между собой, а вторые лямки охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
Реверсивное вращающееся нагружающее устройство может быть выполнено в виде механического нагружающего устройства или электрического генератора, а также в виде гидравлического или пневматического нагружающего устройства, при этом, предпочтительно, гидравлическое нагружающее устройство оснащено перистальтическим насосом, полости которого соединены между собой через регулируемое гидравлическое сопротивление, а пневматическое нагружающее устройство оснащено перистальтическим компрессором, полости которого соединены с атмосферой через параллельно установленные регулируемое гидравлическое сопротивление и обратный клапан.
Сущность изобретения заключается в том, что выполнение переносного мини-тренажера в виде автономного модуля, имеющего корпус, внутри которого установлены основные агрегаты мини-тренажера, включая реверсивное вращающееся нагружающее устройство и систему передачи усилия на нагружающее устройство, при наличии средства крепления мини-тренажера на объекте, оснащенного, по крайней мере, двумя лямками, присоединенными к корпусу автономного модуля, позволяет использовать мини-тренажер непосредственно на прогулках, так как наличие лямок дает возможность закрепить мини-тренажер за спиной пользователя аналогично рюкзаку, либо в стационарных условиях, закрепив мини-тренажер, например, на спинке кресла, при этом пользователь может выполнять физические упражнения в комфортных условия, сидя на кресле. Включение в систему передачи усилия на нагружающее устройство, по крайней мере, двух поворотных опор, причем каждая поворотная опора имеет свой корпус, внутри которого установлен выходной обводной ролик, а в боковой стенке корпуса опоры выполнены два отверстия для пропуска гибкого рабочего органа, к корпусу поворотной опоры соосно первому отверстию присоединена направляющая втулка, а соосно второму отверстию - пустотелая цапфа, установленная в автономном модуле на подшипниках, гибкий рабочий орган пропущен через направляющую втулку и пустотелую цапфу, охватывает частично или полностью установленный в поворотной опоре выходной обводной ролик и обеспечивает удобство пользования мини-тренажером человеком с любыми антропометрическими данными при выполнении любых физических упражнений, так как поворотная опора всегда будет ориентироваться вдоль гибкого рабочего органа по направлению усилия, приложенного к гибкому рабочему органу, с минимальным трением в поворотной опоре. Наличие, по меньшей мере, одного захвата для руки, снабженного накопителем гибкого рабочего органа, фиксатором длины гибкого рабочего органа и устройством для подтягивания гибкого рабочего органа, обеспечивает оптимальную длину гибкого рабочего органа при выполнении физических упражнений и минимальные габариты мини-тренажера в нерабочем положении. Использование нерастяжимого рабочего органа совместно с реверсивным вращающимся нагружающим устройством исключает возможность нанесения удара по пользователю, если захват случайно выскочит из рук.
Закрепление шкива на валу нагружающего устройства обеспечивает прямую передачу нагрузки на реверсивное вращающееся нагружающее устройство.
Предложенная конструкция узла ввода гибкого рабочего органа в корпус автономного модуля с использованием выходного обводного ролика, имеющего периферийную канавку глубиной больше, чем диаметр тросика, а сам выходной обводной ролик установлен в корпусе поворотной опоры с зазором относительно боковой стенки, меньшим половины диаметра тросика, обеспечивает надежное прохождение тросика в корпус автономного модуля без заклинивания его в поворотной опоре.
Наличие на захвате для руки сужающегося полого наконечника и ответного гнезда в направляющей втулке корпуса поворотной опоры обеспечивает компактную сборку автономного модуля в нерабочем положении и постоянное нахождение тросика в натянутом состоянии за счет постоянного усилия подтягивания, создаваемого устройством для подтягивания гибкого рабочего органа.
Предложенная конструкция корпуса автономного модуля обеспечивает комфортное закрепление автономного модуля за спиной пользователя, а также удобство компоновки захватов для рук в нерабочем положении вдоль плоских боковых стенок корпуса.
Наличие на уплощенной опорной поверхности корпуса слоя из деформируемого материала обеспечивает равномерное восприятие усилия по всей площади спины.
Закрепление лямок в средстве для крепления мини-тренажера на объекте вдоль кромок уплощенной опорной поверхности обеспечивает наиболее комфортное и компактное выполнение средства для крепления мини-тренажера на объекте.
Конструкция средства для крепления мини-тренажера на объекте, имеющая, по крайней мере, две первые лямки, каждая из которых закреплена на корпусе автономного модуля в зоне размещения поворотных опор, и, по крайней мере, две вторые лямки, закрепленные на верхней части корпуса автономного модуля, обеспечивает наиболее комфортное и надежное крепление автономного модуля на объекте.
Наличие мягких защитных накладок, закрепленных на корпусе автономного модуля в зоне размещения поворотных опор, обеспечивает защиту пользователя при выполнении физических упражнений, предохраняя его от воздействия гибкого рабочего органа при выполнении физических упражнений.
Закрепление автономного модуля на объекте так, что в рабочем положении первые лямки охватывают объект с боковых сторон и их концы соединены между собой, а вторые лямки охватывают объект сверху и их концы присоединены к первым лямкам, обеспечивает наиболее комфортное и надежное крепление автономного модуля на объекте.
Закрепление лямок в нерабочем положении так, что первые лямки охватывают снаружи захваты для рук и фронтальную поверхность корпуса и их концы соединены между собой, а вторые лямки охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам, обеспечивает фиксацию захватов на корпусе автономного модуля в нерабочем положении и упрощает переноску мини-тренажера.
Конструкция мини-тренажера позволяет оснащать его любым реверсивным вращающимся нагружающим устройством, в частности известными фрикционными реверсивными вращающимися нагружающими устройствами, или электрическим генератором, а также гидравлическими или пневматическими нагружающими устройствами.
Оснащение гидравлического нагружающего устройства перистальтическим насосом, полости которого соединены между собой через регулируемое гидравлическое сопротивление, гарантирует отсутствие каких-либо утечек из гидравлической полости нагружающего устройства и регулирование нагрузки за счет изменения гидравлического сопротивления тракта перепуска рабочей жидкости из одной полости насоса в другую.
Оснащение пневматического нагружающего устройства перистальтическим компрессором, полости которого соединены с атмосферой через параллельно установленные регулируемое гидравлическое сопротивление и обратный клапан, позволяет существенно упростить конструкцию и снизить вес мини-тренажера с уменьшенной физической нагрузкой, что обеспечивает возможность использовать мини-тренажер для физической разминки подростков, детей и лиц с ослабленным здоровьем, в частности в период реабилитации.
Конструкция переносного мини-тренажера по второму варианту исполнения содержит все элементы, присущие описанному выше первому варианту исполнения, и дополнительно включает два промежуточных обводных ролика, размещенных между пустотелыми цапфами и шкивом. Мини-тренажер по второму варианту обладает всеми свойствами мини-тренажера по первому варианту и дополнительно обеспечивает лучшее распределение нагрузки по опорной поверхности корпуса мини-тренажера и, соответственно, более равномерное распределение нагрузки на спину пользователя и более комфортное крепление автономного модуля на спине пользователя.
Конструкция переносного мини-тренажера по третьему варианту исполнения содержит все элементы, присущие описанным первому и второму вариантам исполнения, и дополнительно включает вторую нагружающую цепочку, выполненную аналогично первой нагружающей цепочке и размещенную с противоположной стороны нагружающего устройства. Соответственно мини-тренажеру по третьему варианту требуются четыре поворотные опоры. Мини-тренажер по третьему варианту обладает всеми свойствами мини-тренажера по первому и второму вариантам исполнения и обеспечивает дополнительные возможности при выполнении физических упражнений. В частности наличие второй нагружающей цепочки дает возможность выполнять физические упражнения не только руками или ногами, но и одновременно руками и ногами. Кроме того, наличие второй нагружающей цепочки дает возможность выполнять более разнообразные физические упражнения, в частности, позволяет выполнять синхронные и асинхронные движения руками или ногами.
Конкретные технические результаты, связанные с конструкцией отдельных элементов и узлов мини-тренажера по второму и третьему вариантам исполнения, совпадают с тем, что описано в первом варианте, поэтому здесь подробно не рассматриваются.
Предложенное изобретение позволяет создать переносной мини-тренажер весом не более 5 кг, что дает возможность использовать его на прогулках, закрепив его за спиной. Как минимум, данный тренажер позволяет создавать во время прогулок дополнительную физическую нагрузку на руки, способствуя лучшей физической разминке рук непосредственно во время прогулки. В домашних условиях или при остановке во время прогулки мини-тренажер позволяет дать регулируемую физическую нагрузку с усилием до нескольких килограмм рукам и/или ногам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 приведено изображение пользователя, имеющего закрепленный за спиной предложенный мини-тренажер в соответствии с первым примером осуществления изобретения.
Фиг.2 - блок-схема переносного мини-тренажера для физической разминки в соответствии с первым примером осуществления изобретения.
Фиг.3 - продольный разрез автономного модуля по первому варианту исполнения изобретения.
Фиг.4 - сечение А-А на фиг.3.
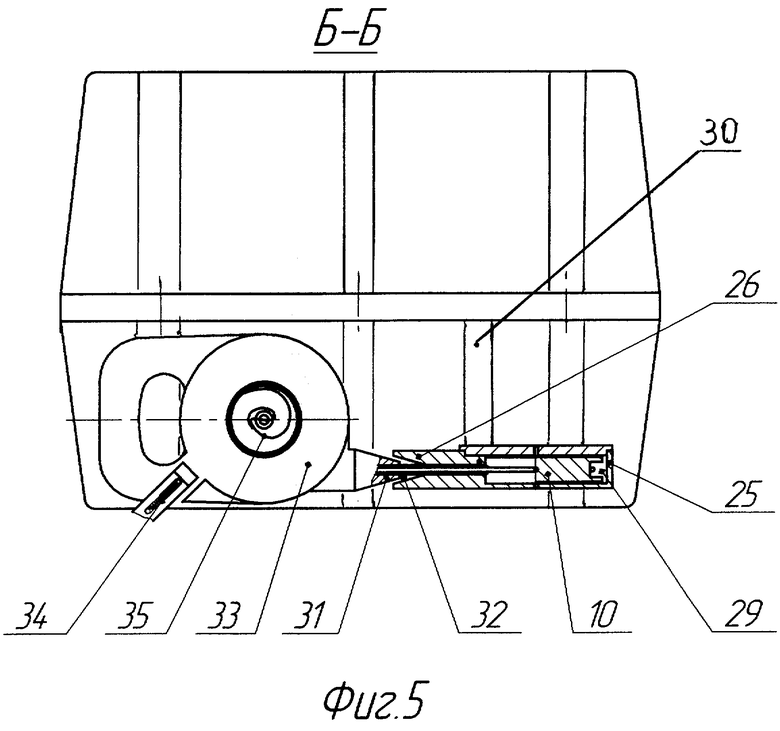
Фиг.5 - вид Б на фиг.4.
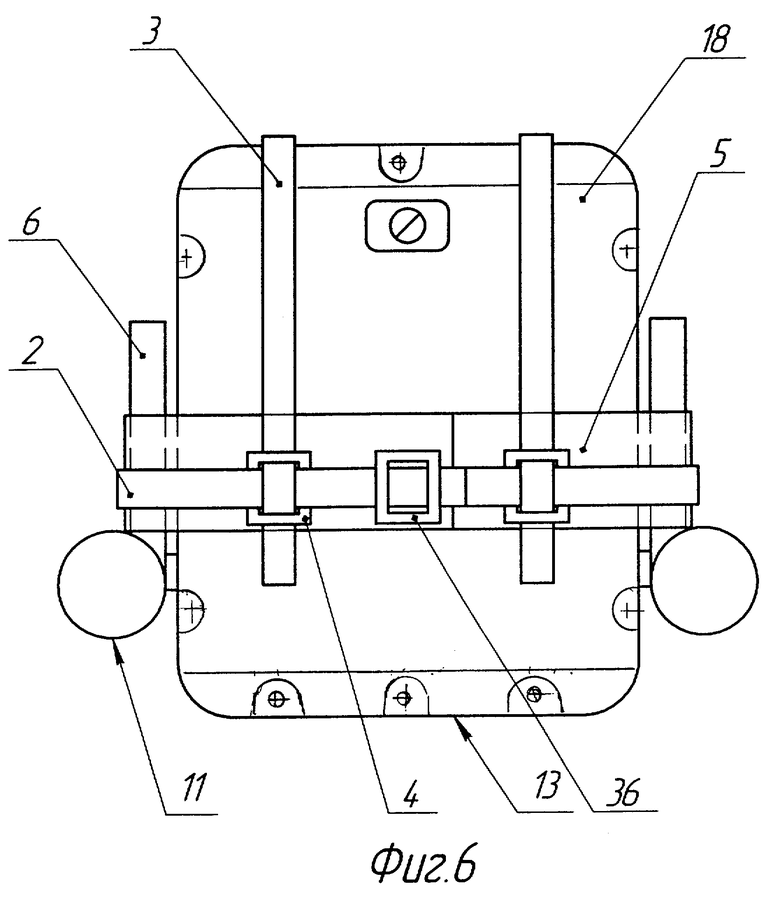
Фиг.6 - мини-тренажер в нерабочем (транспортном) положении.
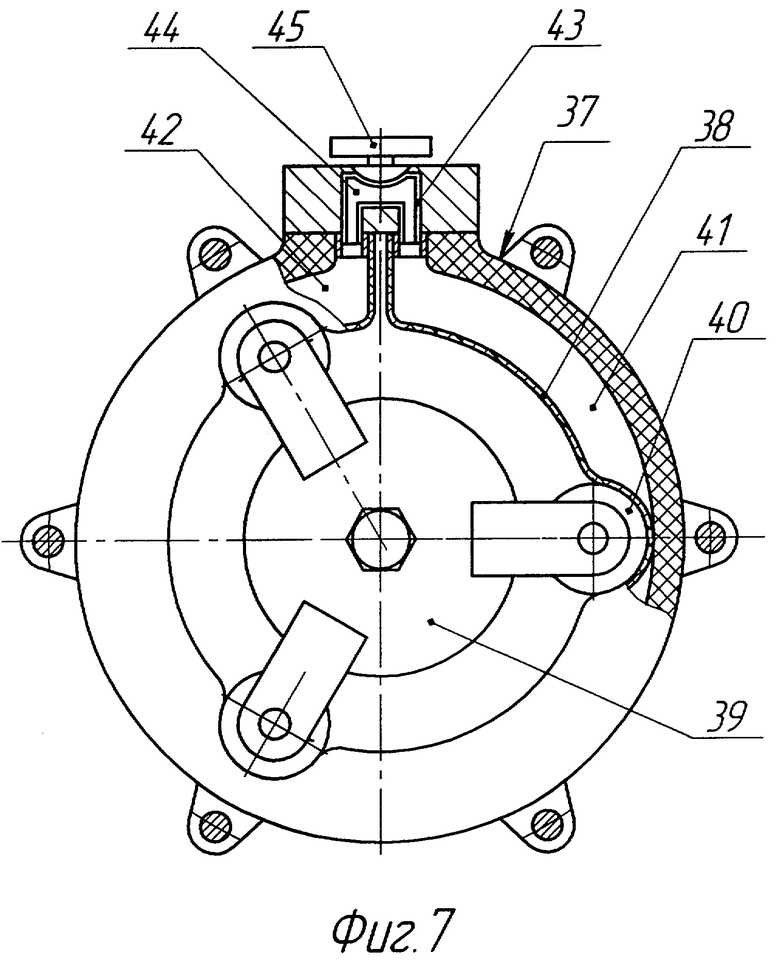
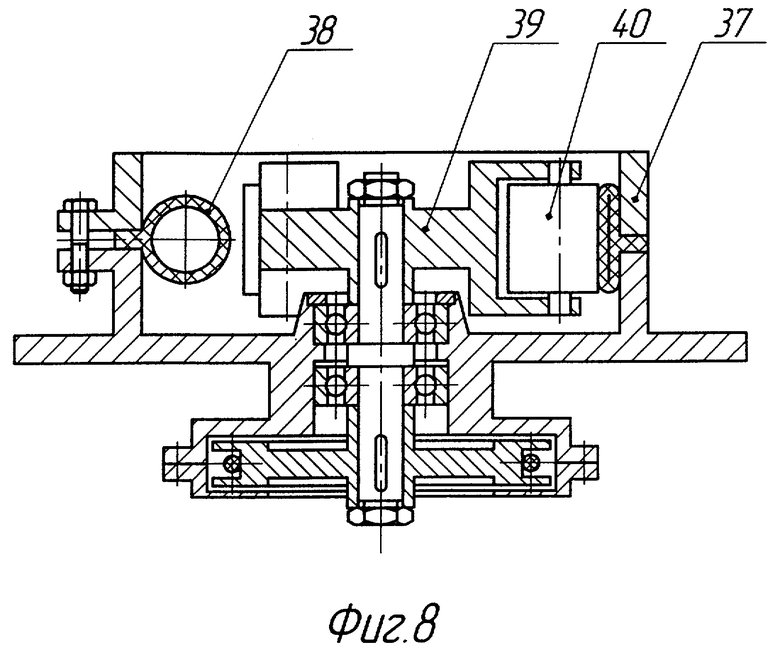
Фиг.7 и 8 - возможное исполнение гидравлического нагружающего устройства с перистальтическим насосом
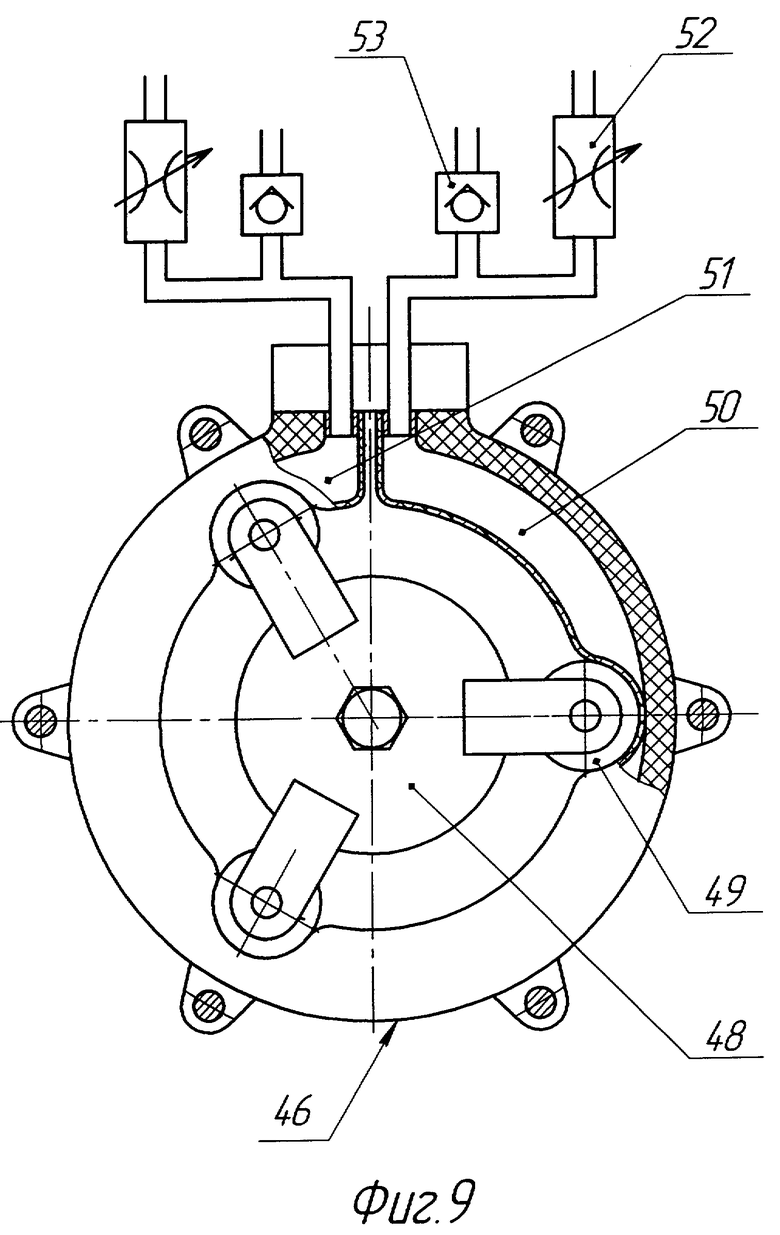
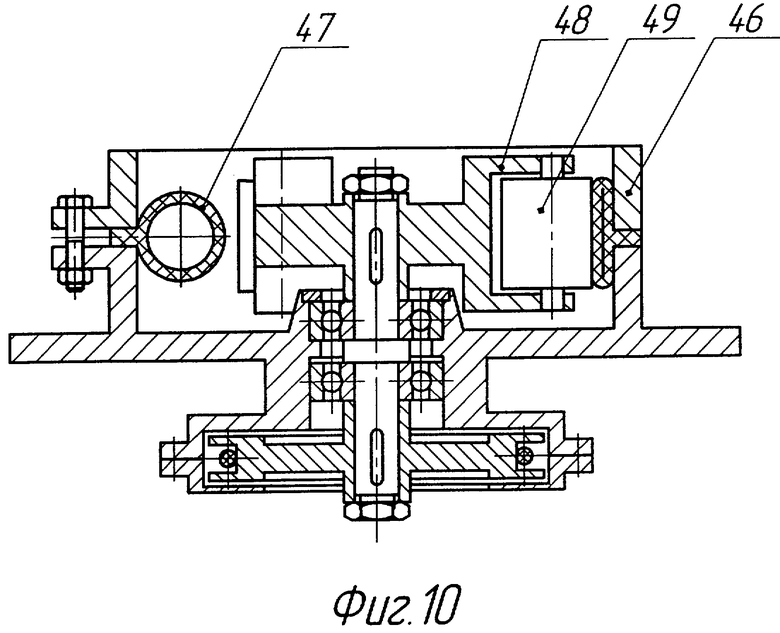
Фиг.9 и 10 - возможное исполнение пневматического нагружающего устройства с перистальтическим компрессором.
Фиг.11 - изображение пользователя при выполнении физических упражнений сидя на стуле.
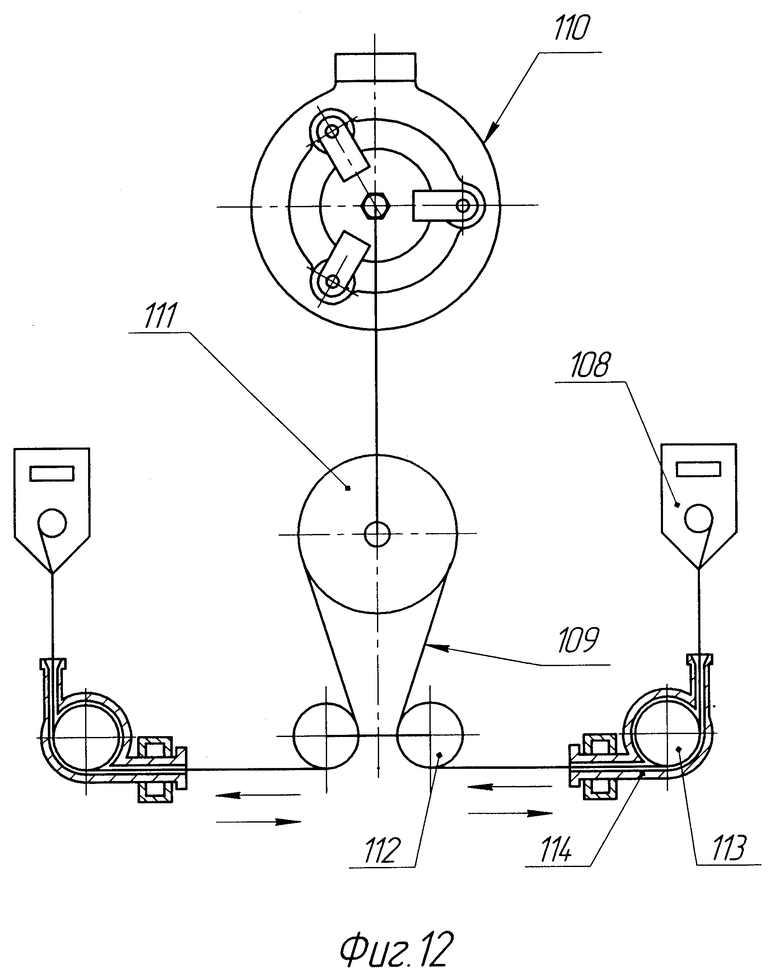
Фиг.12 - блок-схема переносного мини-тренажера для физической разминки в соответствии со вторым примером осуществления изобретения.
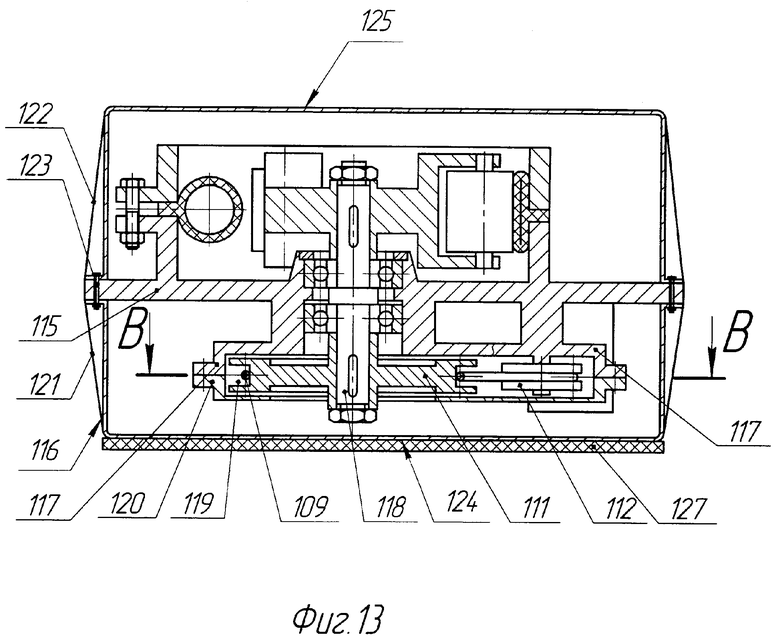
Фиг.13 - продольный разрез автономного модуля по второму примеру осуществления изобретения.
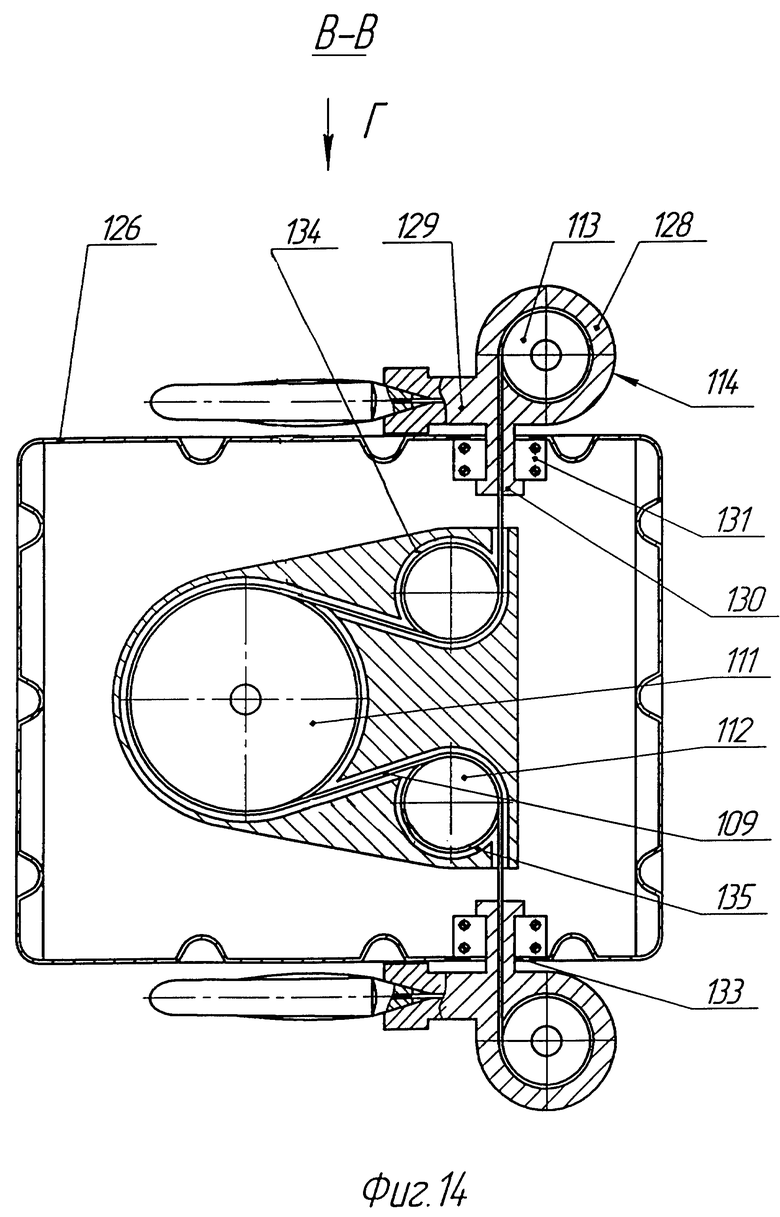
Фиг.14 - сечение В-В на фиг.14.
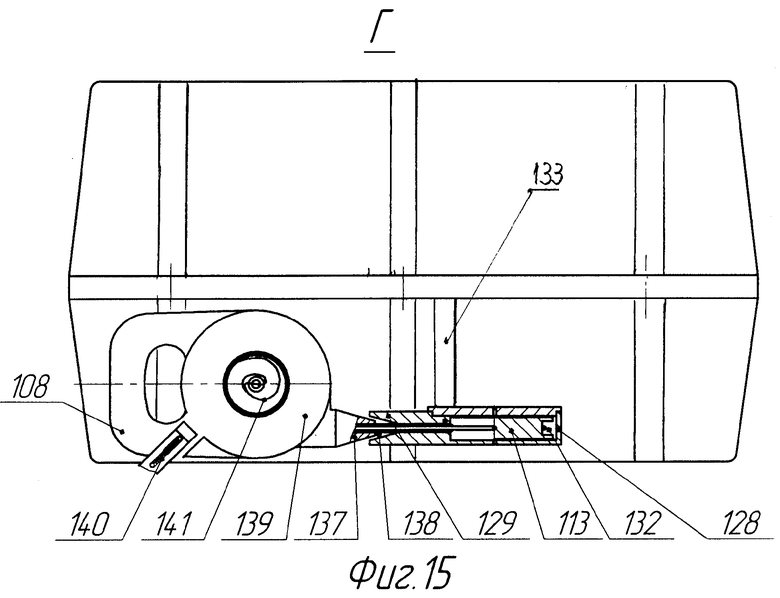
Фиг.15 - вид Г на фиг.15.
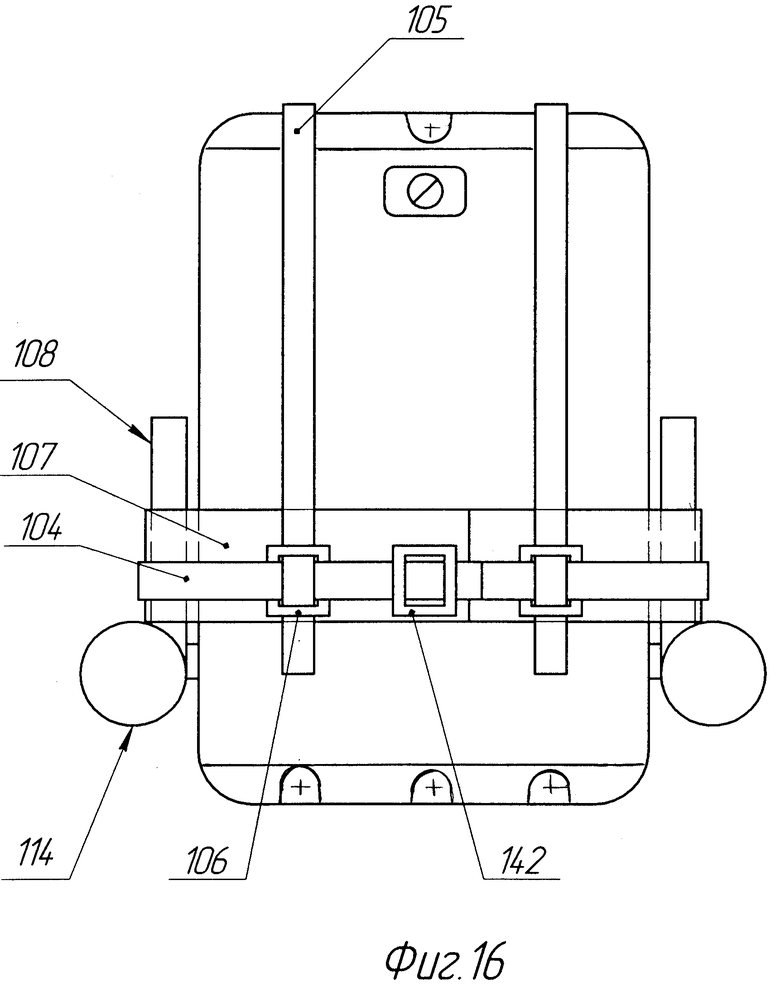
Фиг.16 - мини-тренажер в нерабочем (транспортном) положении.
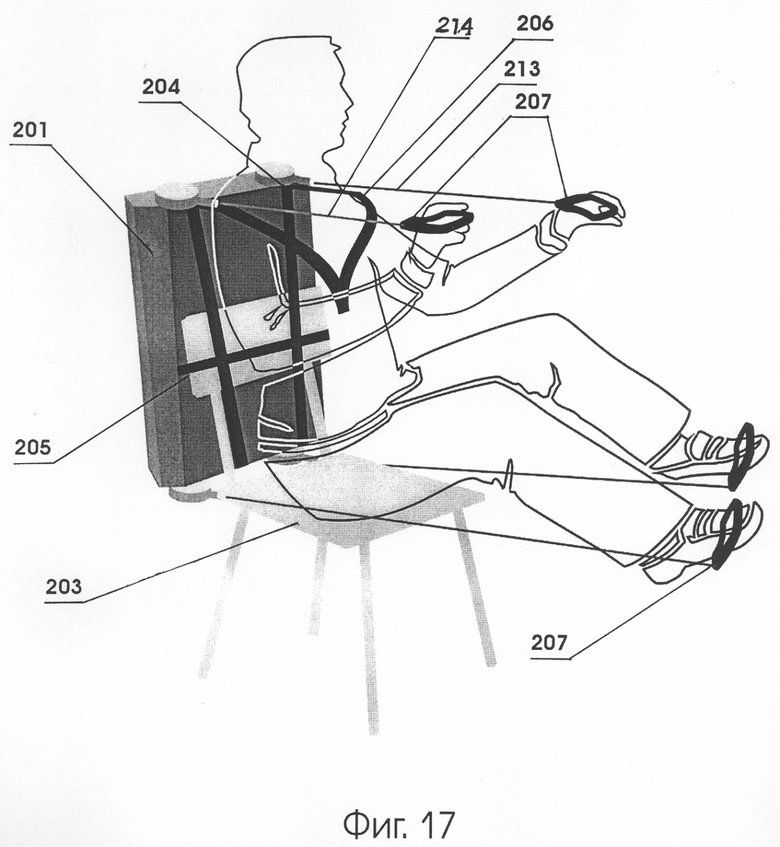
Фиг.17 - изображение пользователя при выполнении физических упражнений сидя на стуле в соответствии с третьим примером осуществления изобретения.
Фиг.18 - блок-схема переносного мини-тренажера для физической разминки в соответствии с третьим примером осуществления изобретения.
Фиг.19 - продольный разрез автономного модуля по третьему примеру осуществления изобретения.
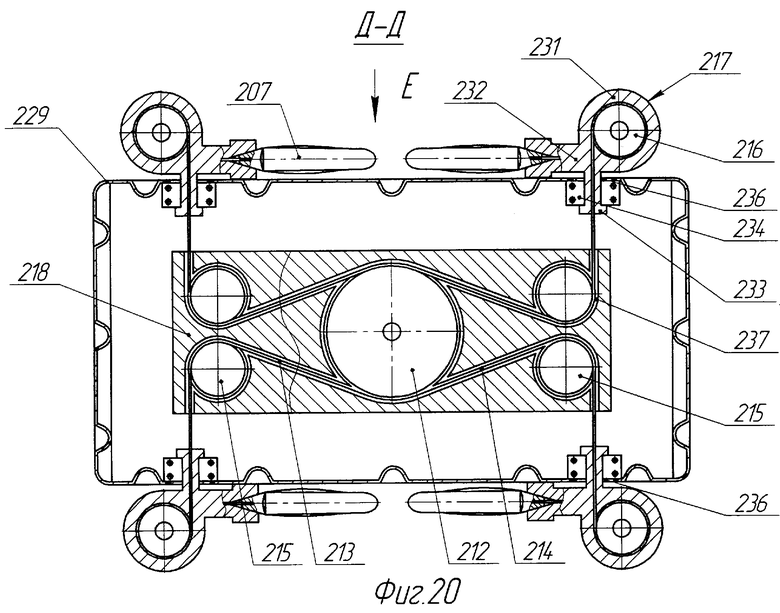
Фиг.20 - сечение Д-Д на фиг.21.
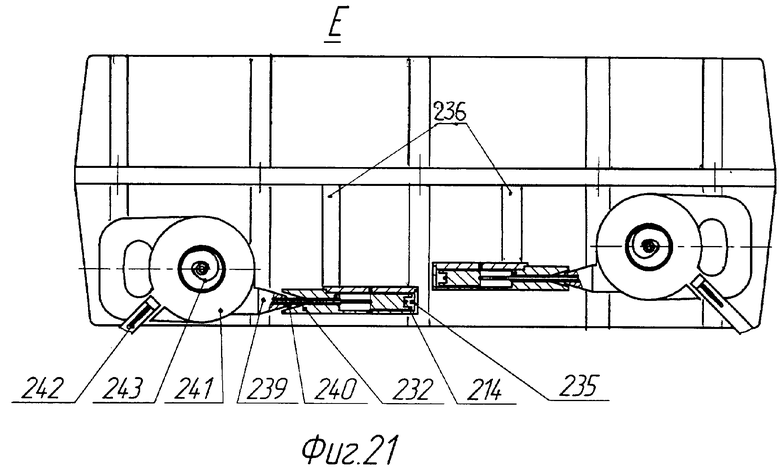
Фиг.21 - вид Е на фиг.22.
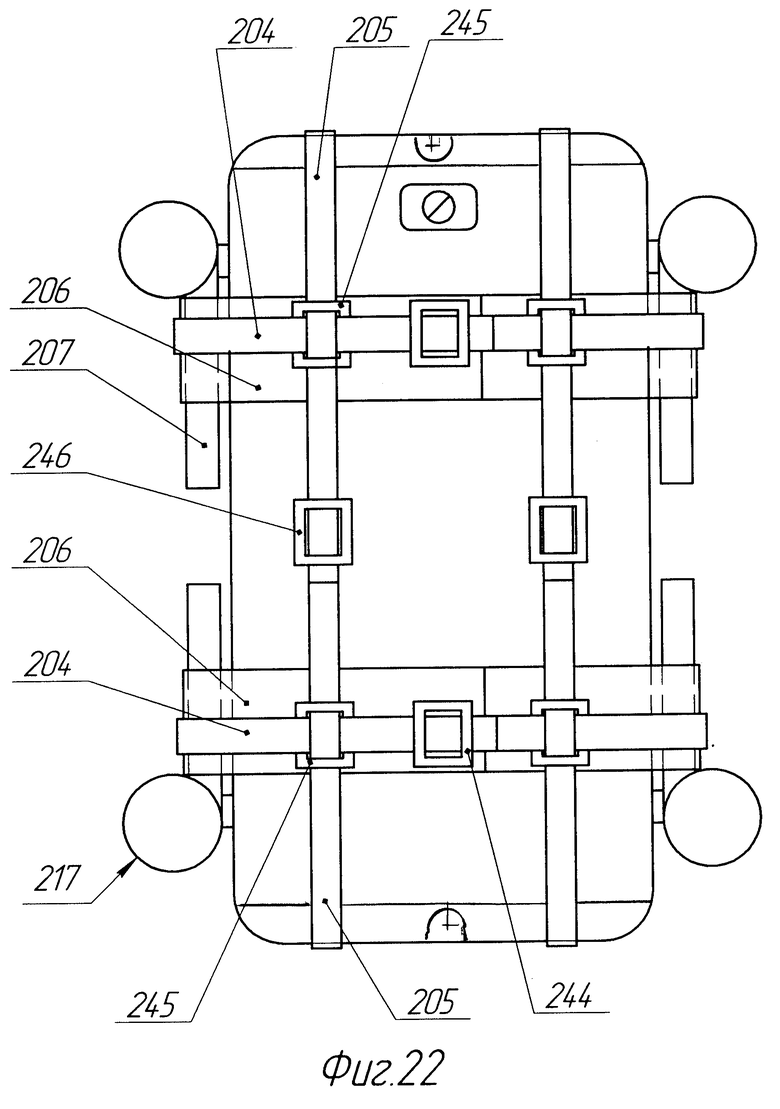
Фиг.22 - мини-тренажер в нерабочем (транспортном) положении.
Чертежи представлены для пояснения работы мини-тренажера и поэтому на них нет точного соблюдения соотношения размеров между отдельными элементами мини-тренажера.
ПРИМЕРЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В соответствии с первым примером осуществления изобретения переносной мини-тренажер выполнен в виде автономного модуля 1, закрепленного за спиной пользователя (объекта). Средство для крепления мини-тренажера за спиной пользователя включает в себя четыре лямки 2 и 3. Первые две лямки 2 охватывают тело пользователя в районе талии и их концы спереди соединены между собой любым известным способом. Вторые две лямки 3 перекинуты через плечи пользователя и их концы присоединены к закрепленным на лямках 2 узлам 4 для фиксации лямок 2 и 3 между собой. Узлы 4 имеют возможность перемещаться вдоль каждой из лямок, регулируя положение автономного модуля 1 за спиной пользователя. Поверх лямок 2 имеются мягкие защитные накладки 5, концы которых соединены между собой с использованием любой застежки, в том числе с использованием легкоразъемных текстильных застежек типа "репейник".
Мини-тренажер имеет два захвата 6, присоединенные к тросику 7, являющемуся гибким рабочим органом системы привода нагружающего устройства. При пользовании мини-тренажером пользователь берется руками за захваты 6 и выполняет физические упражнения, поочередно перемещая руки взад и вперед.
Основу мини-тренажера составляет реверсивное вращающееся нагружающее устройство 8. Указанное устройство 8 приводится во вращение системой передачи усилия, включающей в себя связанный с нагружающим устройством 8 шкив 9, взаимодействующий со шкивом незамкнутый гибкий рабочий орган (тросик 7), на концах которого закреплены захваты 6, и два выходных обводных ролика 10, размещенные в двух поворотных опорах 11.
Реверсивное вращающееся нагружающее устройство 8 закреплено на шасси 12, размещенном в корпусе 13 автономного модуля 1. Шкив 9 закреплен на валу 14 нагружающего устройства и имеет периферийную канавку 15, в которой размещен тросик 7. Глубина канавки 15 больше, чем диаметр тросика 7, так что тросик полностью утоплен в канавке. Шкив 9 установлен в цилиндрической полости фланца 16 и закрыт снаружи крышкой 17. Шкив 9 установлен в цилиндрической полости фланца 16 с зазором относительно его боковой стенки, меньшим диаметра тросика 7. Корпус 13 имеет две литые или штампованные крышки 18 и 19, присоединенные к шасси 12 любым известным способом, например, с помощью болтового соединения 20.
Корпус 13 имеет уплощенную опорную поверхность 21, фронтальную поверхность 22 и плоские боковые стенки 23. На уплощенной опорной поверхности 21 закреплен слой 24 деформируемого материала.
Каждая поворотная опора 11 имеет свой корпус 25, внутри которого установлен один из выходных обводных роликов 10. В боковой стенке корпуса 25 поворотной опоры выполнены два отверстия для пропуска тросика 7. К корпусу поворотной опоры соосно первому отверстию присоединена направляющая втулка 26, а соосно второму отверстию - пустотелая цапфа 27, установленная в подшипниках, например в подшипниках скольжения, опоры 28, закрепленной на шасси 12. Каждый выходной обводной ролик 10 имеет периферийную канавку 29, в которой размещен тросик 7. Глубина периферийной канавки 29 больше, чем диаметр тросика 7. Выходной обводной ролик 10 установлен в корпусе 25 поворотной опоры с зазором относительно боковой стенки, меньшим половины диаметра тросика.
В каждой боковой стенке 23 крышки 18 выполнена открытая прорезь 30, через которую проходит цапфа 27.
Тросик 7 входит в направляющую втулку 26 первой поворотной опоры, охватывает полностью или частично выходной обводной ролик 10 первой поворотной опоры, проходит через пустотелую цапфу 27 первой поворотной опоры, далее охватывает шкив 9, проходит через пустотелую цапфу 27 второй поворотной опоры, охватывает полностью или частично выходной обводной ролик 10 второй поворотной опоры и выходит через направляющую втулку 26 второй поворотной опоры.
Захваты 6, например захваты для рук, как это показано на чертежах, закреплены на свободных концах тросика 7 и, по меньшей мере, один из указанных захватов, а предпочтительно оба захвата, оснащен(ы) охватывающим гибкий рабочий орган сужающимся полым наконечником 31, например коническим, а в направляющей втулке корпуса поворотной опоры выполнено ответное гнездо 32, на поверхность которого в нерабочем положении опирается наконечник 31.
По меньшей мере, один из указанных захватов 6, а предпочтительно оба захвата, оснащен(ы) накопителем 33 гибкого тросика 7, фиксатором 34 длины тросика и устройством 35 для подтягивания тросика. На фиг.4 и 5 захваты 6 показаны в нерабочем положении, когда они расположены вдоль плоских боковых стенок корпуса, при этом накопитель 33 гибкого тросика работает в режиме "подтягивание тросика".
Корпус 13 автономного модуля размещается за спиной пользователя и крепится на туловище, как показано на фиг.1.
Непосредственно к спине прилегает слой 24 деформируемого материала, который способствует равномерному распределению нагрузки по поверхности спины. Две первые лямки 2, присоединенные любым известным способом к нижней крышке 18, в зоне поворотных опор 11 охватывают с двух сторон туловище и соединяются спереди, предпочтительно на талии, например, с помощью любой ременной пряжки 36. Ширина лямок 2 выбирается из условия надежной и комфортной фиксации автономного модуля на туловище. На крышке 18 в зоне размещения поворотных опор 11 также закреплены две мягкие защитные накладки 5, которые охватывают туловище поверх лямок 2. Свободные концы защитных накладок соединены между собой любым известным способом. Ширина мягких защитных накладок выбирается из условия исключения непосредственного контакта тросика 7 с туловищем при выполнении любых физических упражнений. В предельном варианте мягкие защитные накладки закрывают туловище от талии до подмышек. В рабочем положении поворотные опоры 11 разворачиваются практически на 90° так, что захваты на концах тросиков можно переместить вперед в любое удобное положение.
В нерабочем (транспортировочном) положении захваты 6 на концах тросиков размещаются вдоль боковых поверхностей корпуса автономного модуля. Захваты зафиксированы в этом положении мягкими защитными накладками 5, охватывающими снаружи их и фронтальную поверхность корпуса. На фронтальной поверхности корпуса свободные кромки мягких защитных накладок соединяются между собой. Первые лямки 2 охватывают снаружи захваты для рук и фронтальную поверхность корпуса поверх мягких защитных накладок и их концы соединены между собой, а вторые лямки 3 охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
В мини-тренажере могут использоваться любые вращающиеся нагружающие устройства, в том числе широко известные механические нагружающие устройства фрикционного типа и электрогенераторы, а также гидравлические и пневматические вращающиеся нагружающие устройства.
Гидравлическое нагружающее устройство с перистальтическим насосом представляет собой корпус 37, в котором закреплен упругий шланг 38, и ротор 39 с обкатными роликами 40. Количество роликов может быть любым, но предпочтительно иметь три ролика 40. Ролики делят внутреннюю полость шланга на отдельные рабочие полости. На фиг.8 выделены две рабочие полости 41 и 42, расположенные на выходе из насоса. На выходе из насоса рабочие полости 41 и 42 соединяются между собой гибким шлангом 43 с регулируемым гидравлическим сопротивлением 44. Предпочтительно выполнять регулируемое гидравлическое сопротивление 44 как пережимающее устройство 45.
Пневматическое нагружающее устройство с перистальтическим компрессором по схеме работы мало отличается от описанного выше гидравлического нагружающего устройства. Перистальтический компрессор имеет корпус 46, в котором закреплен упругий шланг 47, и ротор 48 с обкатными роликами 49. Количество роликов может быть любым, но предпочтительно иметь три ролика 49. Ролики делят внутреннюю полость шланга на отдельные рабочие полости. На фиг.10 выделены две рабочие полости 50 и 51, расположенные на выходе из компрессора. На выходе из компрессора каждая рабочая полость 50 и 51 соединяется с атмосферой через управляющий блок, в состав которого входят параллельно установленные регулируемое гидравлическое сопротивление 52 и обратный клапан 53.
При выполнении физических упражнений захваты 6 перемещают взад-вперед, в результате чего вращается шкив 9 и приводится в действие реверсивное вращающееся нагружающее устройство 8, создавая усилие, препятствующее перемещению захватов 6. Уровень нагрузки определяется скоростью перемещения захватов 6 и собственно сопротивлением реверсивного вращающегося нагружающего устройства 8. Сопротивление реверсивного вращающегося нагружающего устройства 8 можно регулировать, в частности, в нагружающем устройстве с перистальтическим насосом, его сопротивление регулируют, изменяя гидравлическое сопротивление 44, а в нагружающем устройстве с перистальтическим компрессором его сопротивление регулируют, изменяя гидравлическое сопротивление 52.
Второй пример осуществления изобретения рассмотрен применительно к использованию мини-тренажера в положении сидя на стуле со спинкой, как показано на фиг.11. Переносной мини-тренажер выполнен в виде автономного модуля 101, закрепленного на спинке 102 стула 103. Средство для крепления мини-тренажера включает в себя четыре лямки 104 и 105. Первые две лямки 104 размещены горизонтально и охватывают спинку 102 стула на уровне талии пользователя и их концы спереди соединены между собой любым известным способом. Вторые две лямки 105 перекинуты через верхнюю кромку спинки стула и их концы присоединены к закрепленным на лямках 104 узлам 106 для фиксации лямок 104 и 105 между собой. Узлы 106 имеют возможность перемещаться вдоль каждой из лямок 104, регулируя положение автономного модуля 101 на стуле. Автономный модуль имеет мягкие защитные накладки 107. Защитные накладки охватывают талию пользователя, концы защитных накладок соединены между собой с использованием любой застежки, в том числе с использованием легкоразъемных текстильных застежек типа "репейник".
Мини-тренажер имеет два захвата 108, присоединенные к тросику 109, являющемуся гибким рабочим органом системы привода нагружающего устройства. При пользовании мини-тренажером пользователь берется руками за захваты 108 и выполняет физические упражнения, поочередно перемещая руки взад и вперед.
Основу мини-тренажера составляет реверсивное вращающееся нагружающее устройство 110. Указанное устройство 110 приводится во вращение системой передачи усилия, включающей в себя связанный с нагружающим устройством шкив 111, взаимодействующий со шкивом незамкнутый гибкий рабочий орган (тросик 109), на концах которого закреплены захваты 108, два промежуточных обводных ролика 112 и два выходных обводных ролика 113. Выходные обводные ролики 113 размещены в двух поворотных опорах 114.
Реверсивное вращающееся нагружающее устройство 110 закреплено на шасси 115, размещенном в корпусе 116 автономного модуля 101. К шасси 115 присоединена монтажная пластина 117, на которой размещены элементы системы передачи усилия. Шкив 111 закреплен на валу 118 нагружающего устройства и имеет периферийную канавку 119, в которой размещен тросик 109. Глубина канавки 119 больше, чем диаметр тросика 109, так что тросик полностью утоплен в канавке. Шкив 111 установлен в углублении монтажной пластины и закрыт снаружи крышкой 120. Шкив 111 установлен в углублении монтажной пластины 117 с зазором относительно его боковой стенки, меньшим диаметра тросика 109. Корпус 116 имеет две литые или штампованные крышки 121 и 122, присоединенные к шасси 115 любым известным способом, например, с помощью болтового соединения 123.
Корпус 116 имеет уплощенную опорную поверхность 124, фронтальную поверхность 125 и плоские боковые стенки 126. На уплощенной опорной поверхности 124 закреплен слой 127 деформируемого материала.
Каждая поворотная опора 114 имеет свой корпус 128, внутри которого установлен один из выходных обводных роликов 113. В боковой стенке корпуса 128 поворотной опоры выполнены два отверстия для пропуска тросика 109. К корпусу поворотной опоры соосно первому отверстию присоединена направляющая втулка 129, а соосно второму отверстию - пустотелая цапфа 130, установленная в подшипниках, например в подшипниках скольжения, опоры 131, закрепленной на шасси 115. Каждый выходной обводной ролик 113 имеет периферийную канавку 132, в которой размещен тросик 109. Глубина периферийной канавки 132 больше, чем диаметр тросика 109. Выходной обводной ролик 113 установлен в корпусе 128 поворотной опоры с зазором относительно боковой стенки, меньшим половины диаметра тросика 109.
В каждой боковой стенке 126 крышки 121 выполнена открытая прорезь 133, через которую проходит цапфа 130.
По схеме крепления устройства для крепления промежуточных обводных роликов 112 выполнены аналогично креплению шкива 111. В монтажной пластине 117 имеются углубления 134 и 135, в каждом из которых установлен один из промежуточных обводных роликов 112. Каждый промежуточный обводной ролик 112 имеет периферийную канавку 136, в которой размещен тросик 109. Глубина периферийной канавки 136 больше, чем диаметр тросика 109. Промежуточные обводные ролики 112 установлены в углублениях с зазором относительно боковой стенки, меньшим половины диаметра тросика 109.
Тросик 109 входит в направляющую втулку 127 первой поворотной опоры 114, охватывает полностью или частично выходной обводной ролик 113 первой поворотной опоры, проходит через пустотелую цапфу 130 первой поворотной опоры, далее охватывает первый промежуточный обводной ролик 112, шкив 111, второй промежуточный обводной ролик 112, проходит через пустотелую цапфу 130 второй поворотной опоры 114, охватывает полностью или частично выходной обводной ролик 113 второй поворотной опоры и выходит через направляющую втулку 129 второй поворотной опоры.
Захваты 108, например захваты для рук, как это показано на чертежах, закреплены на свободных концах тросика 109 и, по меньшей мере, один из указанных захватов, а предпочтительно оба захвата оснащен(ы) охватывающим гибкий рабочий орган сужающимся полым наконечником 137, например коническим, а в направляющей втулке корпуса поворотной опоры выполнено ответное гнездо 138, на поверхность которого в нерабочем положении опирается наконечник 137.
По меньшей мере, один из указанных захватов 108, а предпочтительно оба захвата оснащен(ы) накопителем 139 гибкого тросика 109, фиксатором 140 длины тросика и устройством 141 для подтягивания тросика. На фиг.14 и 15 захваты 108 показаны в нерабочем положении, когда они расположены вдоль плоских боковых стенок корпуса, при этом накопитель 139 гибкого тросика работает в режиме "подтягивание тросика".
Корпус 116 автономного модуля закрепляется на спинке стула.
Непосредственно к спинке стула прилегает слой 127 деформируемого материала, находящийся на уплощенной поверхности стенки корпуса. Слой 127 деформируемого материала способствует равномерному распределению нагрузки по поверхности спины при креплении автономного модуля на спине пользователя. Две первые лямки 104, присоединенные любым известным способом к нижней крышке 121, в зоне поворотных опор 114 охватывают с двух сторон спинку стула и соединяются спереди с помощью любой ременной пряжки 142. Ширина лямок 104 выбирается из условия надежной и комфортной фиксации автономного модуля на туловище пользователя, так как крепление на туловище пользователя является одним из основных режимов использования мини-тренажера по любому примеру исполнения. На крышке 121 в зоне размещения поворотных опор 114 также закреплены две мягкие защитные накладки 107, которые охватывают туловище пользователя. Свободные концы защитных накладок 107 соединены между собой любым известным способом. Ширина мягких защитных накладок выбирается из условия исключения непосредственного контакта тросика 109 с туловищем при выполнении любых физических упражнений. В предельном варианте мягкие защитные накладки закрывают туловище от талии до подмышек. В рабочем положении поворотные опоры 114 разворачиваются практически на 90° так, что захваты на концах тросиков можно переместить вперед в любое удобное положение. Приведенный режим использования мини-тренажера не является единственным и данный мини-тренажер может использоваться аналогично описанному мини-тренажеру в первом примере осуществления.
В нерабочем (транспортировочном) положении захваты 108 на концах тросиков размещаются вдоль боковых поверхностей корпуса автономного модуля. Захваты зафиксированы в этом положении мягкими защитными накладками 107, охватывающими снаружи их и фронтальную поверхность корпуса. На фронтальной поверхности корпуса свободные кромки мягких защитных накладок соединяются между собой. Первые лямки 104 охватывают снаружи захваты для рук и фронтальную поверхность корпуса поверх мягких защитных накладок и их концы соединены между собой, а вторые лямки 105 охватывают снаружи фронтальную поверхность корпуса и их концы присоединены к первым лямкам.
В мини-тренажере могут использоваться любые вращающиеся нагружающие устройства, в том числе широко известные механические нагружающие устройства фрикционного типа и электрогенераторы, а также гидравлические вращающиеся нагружающие устройства с перистальтическим насосом и пневматические вращающиеся нагружающие устройства с перистальтическим компрессором. Подробное описание этих устройств не приводится, так они совпадают с устройствами, описанными в первом примере осуществления мини-тренажера.
Третий пример осуществления изобретения рассмотрен применительно к использованию мини-тренажера в положении сидя на стуле со спинкой, как показано на фиг.17. Переносной мини-тренажер выполнен в виде автономного модуля 201, закрепленного на спинке 202 стула 203. Средство для крепления мини-тренажера включает в себя четыре лямки 204 и четыре лямки 205, которые позволяют крепить автономный модуль мини-тренажера на любом объекте: спинке или ножках стула, заборе, дереве, стойках и т.п. или на спине пользователя при двух различных ориентациях. В рассматриваемом на фиг.17 примере лямки 204 размещены вертикально, а лямки 205 - горизонтально.
Автономный модуль имеет четыре мягкие защитные накладки 206, концы которых соединены между собой с использованием любой застежки, в том числе с использованием легкоразъемных текстильных застежек типа "репейник".
Мини-тренажер имеет четыре захвата 207 (a, b, c, d), позволяющие выполнять физические упражнения руками и ногами одновременно.
Основу мини-тренажера составляют реверсивное вращающееся нагружающее устройство 208 и система передачи усилия на нагружающее устройство с гибким рабочим органом, включающая в себя две нагружающие цепочки 209 и 210, размещенные с противоположных сторон нагружающего устройства.
Нагружающие цепочки включают в себя шкивы 211 и 212, каждый из которых связан с нагружающим устройством 208, взаимодействующие со шкивами незамкнутые гибкие рабочие органы (тросики 213 и 214), на концах которых закреплены захваты 207, и промежуточные 215 и выходные 216 обводные ролики.
Выходные обводные ролики 216 размещены в четырех поворотных опорах 218.
Реверсивное вращающееся нагружающее устройство 208 закреплено на шасси 218, размещенном в корпусе 219 автономного модуля 201. Шкивы 211 и 212 закреплены на валу 220 нагружающего устройства. Каждый шкив имеет периферийную канавку 221, в которой размещен тросик 213 или 214. Глубина канавки 221 больше, чем диаметр тросика, так что тросик полностью утоплен в канавке. Шкивы 211 и 212 установлены в углублении монтажной пластины 222 и закрыты снаружи крышкой 223. Шкивы 211 и 212 установлены в углублении монтажной пластины 222 с зазором относительно его боковой стенки, меньшим диаметра тросика. Корпус 219 имеет две литые или штампованные крышки 224 и 225, присоединенные к шасси 218 любым известным способом, например, с помощью болтового соединения 226.
Корпус 219 имеет уплощенную опорную поверхность 227, фронтальную поверхность 228 и плоские боковые стенки 229. На уплощенной опорной поверхности 227 закреплен слой 230 деформируемого материала.
Каждая поворотная опора 217 имеет свой корпус 231, внутри которого установлен один из выходных обводных роликов 216. В боковой стенке корпуса 231 поворотной опоры выполнены два отверстия для пропуска тросика. К корпусу поворотной опоры соосно первому отверстию присоединена направляющая втулка 232, а соосно второму отверстию - пустотелая цапфа 233, установленная в подшипниках, например подшипниках скольжения, опоры 234, закрепленной на шасси 219. Каждый выходной обводной ролик 216 имеет периферийную канавку 235, в которой размещен тросик. Глубина периферийной канавки 235 больше, чем диаметр тросика. Выходной обводной ролик 216 установлен в корпусе 231 поворотной опоры с зазором относительно боковой стенки, меньшим половины диаметра тросика.
В каждой боковой стенке 229 крышки 225 выполнены открытые прорези 236, через которые проходят цапфы 233.
Крепление промежуточных обводных роликов 215 выполнено аналогично креплению шкивов 211 и 212. На монтажной пластине 222 имеются углубления 237, в каждом из которых установлен один из промежуточных обводных роликов 215. Каждый промежуточный обводной ролик 215 имеет периферийную канавку 238, в которой размещен тросик. Глубина периферийной канавки 238 больше, чем диаметр тросика. Промежуточный обводной ролик 215 установлен в углублении 237 с зазором относительно боковой стенки, меньшим половины диаметра тросика.
В первой нагружающей цепочке 209 тросик 213 входит в направляющую втулку 232 первой поворотной опоры 217, охватывает полностью или частично выходной обводной ролик 216 первой поворотной опоры, проходит через пустотелую цапфу 233 первой поворотной опоры, далее охватывает первый промежуточный обводной ролик 215, шкив 211, второй промежуточный обводной ролик 215, проходит через пустотелую цапфу 233 второй поворотной опоры 217, охватывает полностью или частично выходной обводной ролик 216 второй поворотной опоры и выходит через направляющую втулку 232 второй поворотной опоры.
Аналогичным образом во второй нагружающей цепочке 210 запасован тросик 214.
Захваты 207 (а, b, с, d) закреплены на свободных концах тросиков 213 и 214 и, по меньшей мере, два из указанных захватов, а предпочтительно все четыре захвата, оснащены охватывающим гибкий рабочий орган сужающимся полым наконечником 239, например коническим, а в направляющей втулке корпуса поворотной опоры выполнено ответное гнездо 240, на поверхность которого в нерабочем положении опирается наконечник 239.
По меньшей мере, два из указанных захватов 207, а предпочтительно все четыре захвата, оснащены накопителем 241 гибкого тросика, фиксатором 242 длины тросика и устройством 243 для подтягивания тросика. На фиг.20 и 21 захваты 207 показаны в нерабочем положении, когда они расположены вдоль плоских боковых стенок корпуса, при этом накопители 241 гибких тросиков работают в режиме "подтягивание тросика".
При креплении мини-тренажера на спинке кресла непосредственно к спинке стула прилегает слой 230 деформируемого материала, находящийся на уплощенной поверхности крышки корпуса. Слой 230 деформируемого материала способствует равномерному распределению нагрузки по поверхности спины при креплении автономного модуля на спине пользователя. Первые лямки 204, присоединенные любым известным способом к нижней крышке 225 зоне поворотных опор 217, охватывают сверху и снизу спинку стула и соединяются спереди попарно с помощью любых ременных пряжек 244. Ширина лямок 204 выбирается из условия надежной и комфортной фиксации автономного модуля на туловище пользователя, так как крепление на туловище пользователя является одним из основных режимов использования мини-тренажера по любому примеру исполнения. Вторые лямки 205 охватывают спинку стула с боковых сторон и их концы присоединены к закрепленным на лямках 204 узлам 245 для фиксации лямок 204 и 205 между собой. Узлы 245 имеют возможность перемещаться вдоль каждой из лямок 204, регулируя положение автономного модуля 201 на стуле. Концы вторых лямок соединены между собой попарно с помощью любых ременных пряжек 246, которые могут быть выполнены аналогично ременным пряжкам 244.
В рабочем положении поворотные опоры 217 разворачиваются практически на 90° так, что захваты 207 на концах тросиков можно переместить вперед в любое удобное положение.
В нерабочем (транспортировочном) положении захваты 207 на концах тросиков размещаются вдоль боковых поверхностей корпуса автономного модуля. Захваты зафиксированы в этом положении мягкими защитными накладками 206, охватывающими снаружи их и фронтальную поверхность корпуса. На фронтальной поверхности корпуса свободные кромки мягких защитных накладок соединяются между собой. Первые лямки 204 охватывают снаружи захваты для рук и выпуклую фронтальную поверхность корпуса поверх мягких защитных накладок и их концы соединены между собой, а вторые лямки 205 охватывают снаружи выпуклую фронтальную поверхность корпуса и их концы соединены между собой.
В мини-тренажере могут использоваться любые вращающиеся нагружающие устройства, в том числе широко известные механические нагружающие устройства фрикционного типа и электрогенераторы, а также гидравлические вращающиеся нагружающие устройства с перистальтическим насосом и пневматические вращающиеся нагружающие устройства с перистальтическим компрессором. Подробное описание этих устройств не приводится, так они совпадают с устройствами, описанными в первом примере осуществления мини-тренажера.
Предложенный мини-тренажер может использоваться для выполнения различных физических упражнений, в том числе при передвижении.
Общим режимом выполнения физических упражнений для всех трех примеров осуществления мини-тренажера является выполнение физических упражнений руками во время прогулок. Применительно к первому примеру осуществления автономный модуль 1 крепится за спиной пользователя, как это показано на фиг.1, так, что вращающиеся опоры 11 и захваты 6 располагаются с двух сторон относительно пользователя. Пользователь берет руками захваты 6 и регулирует длину тросика 7 для выполнения упражнения - попеременное перемещение рук взад-вперед, и может выполнять это упражнение во время прогулки в любом ритме. Уровень нагрузки регулируется либо скоростью перемещения тросика, либо уровнем сопротивления во вращающемся нагружателе. Аналогично упражнение может быть выполнено сидя на стуле с креплением автономного модуля на спинке стула, как это показано на фиг.11, либо на любом другом жестком объекте: столбике, дереве, перекладине и т.д. Аналогичным образом это упражнение выполняется и для двух других примеров осуществления мини-тренажера, при этом в третьем примере осуществления пользователь берет в правую и левую руки по два захвата 207а и 207d и, соответственно, 207b и 207с.
То же самое упражнение может быть выполнено в положении сидя или при креплении мини-тренажера на любом жестком объекте. Дополнительно в положении сидя это упражнение можно выполнить ногами.
При использовании мини-тренажера по третьему примеру осуществления физические упражнения можно одновременно выполнять руками и ногами, закрепив мини-тренажер на спинке стула или на любом другом жестком объекте. В варианте крепления, изображенном на фиг.17, можно выполнять физические упражнения одновременно руками и ногами, присоединив захват 207b к правой ноге и захват 207с к левой ноге и взявшись руками за захваты 207а и 207d. В примере, показанном на фиг.17, пользователь выполняет согласованные движения руками и ногами, в частности перемещение обоих рук вперед при одновременном перемещении ног назад.
Если присоединить захват 207b к левой ноге, а захват 207с к правой ноге, и взяться руками за захваты 207а и 207d, то можно выполнять другое упражнение: попеременное движение руками и ногами взад и вперед, как это описано выше для общего режима выполнения физических упражнений.
Данные примеры не исчерпывают всех возможностей использования мини-тренажера и приведены в качестве иллюстрации.
Специалисту в данной области техники должно быть очевидным, что в настоящем изобретении возможны разнообразные модификации и изменения. Соответственно, предполагается, что настоящее изобретение охватывает указанные модификации и изменения, а также их эквиваленты, без отступления от сущности и объема изобретения, раскрытых в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОФИСНОЕ ИЛИ ДОМАШНЕЕ КРЕСЛО, ОСНАЩЕННОЕ СРЕДСТВАМИ ДЛЯ ФИЗИЧЕСКОЙ РАЗМИНКИ | 2004 |
|
RU2250068C1 |
| ОФИСНОЕ ИЛИ ДОМАШНЕЕ КРЕСЛО И СРЕДСТВО ДЛЯ ФИЗИЧЕСКОЙ РАЗМИНКИ РУК В ПОЛОЖЕНИИ СИДЯ | 2004 |
|
RU2250066C1 |
| КРЕСЛО С НАДУВАЕМЫМИ ОПОРНЫМИ ПОДУШКАМИ | 2004 |
|
RU2247523C1 |
| ОФИСНОЕ ИЛИ ДОМАШНЕЕ КРЕСЛО И СРЕДСТВО ДЛЯ ФИЗИЧЕСКОЙ РАЗМИНКИ НОГ В ПОЛОЖЕНИИ СИДЯ | 2004 |
|
RU2250067C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ ЭНЕРГИИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2251629C1 |
| ТРЕНАЖЕР С "БЕГУЩЕЙ" ДОРОЖКОЙ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2524912C1 |
| Проходческий комбайн | 1977 |
|
SU723121A1 |
| КРЕСЛО ОПЕРАТОРА | 1992 |
|
RU2068646C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ЗУБОЧЕЛЮСТНЫХ АНОМАЛИЙ | 1991 |
|
RU2043085C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |






Изобретение относится к средствам для выполнения легких физических упражнений и представляет собой переносной мини-тренажер, выполненный в виде автономного модуля, корпус которого можно закрепить на спине пользователя или на любом подходящем жестком объекте, например на спинке стула. Основу мини-тренажера составляет вращающееся реверсивное нагружающее устройство любого типа: механические тормозные устройства, электрогенераторы, перистальтические насосы и компрессоры. Усилие на нагружающее устройство передается через гибкий тросик, на концах которого закреплены захваты, оснащенные накопителями гибкого тросика, что позволяет регулировать длину тросика в соответствии с антропологическими данными пользователя. Для ввода тросика в корпус автономного модуля используются поворотные опоры, через которые пропущен гибкий тросик. Технический результат - расширение функциональных и эксплуатационных возможностей и повышение удобства в пользовании. 3 н. и 58 з.п. ф-лы, 22 ил.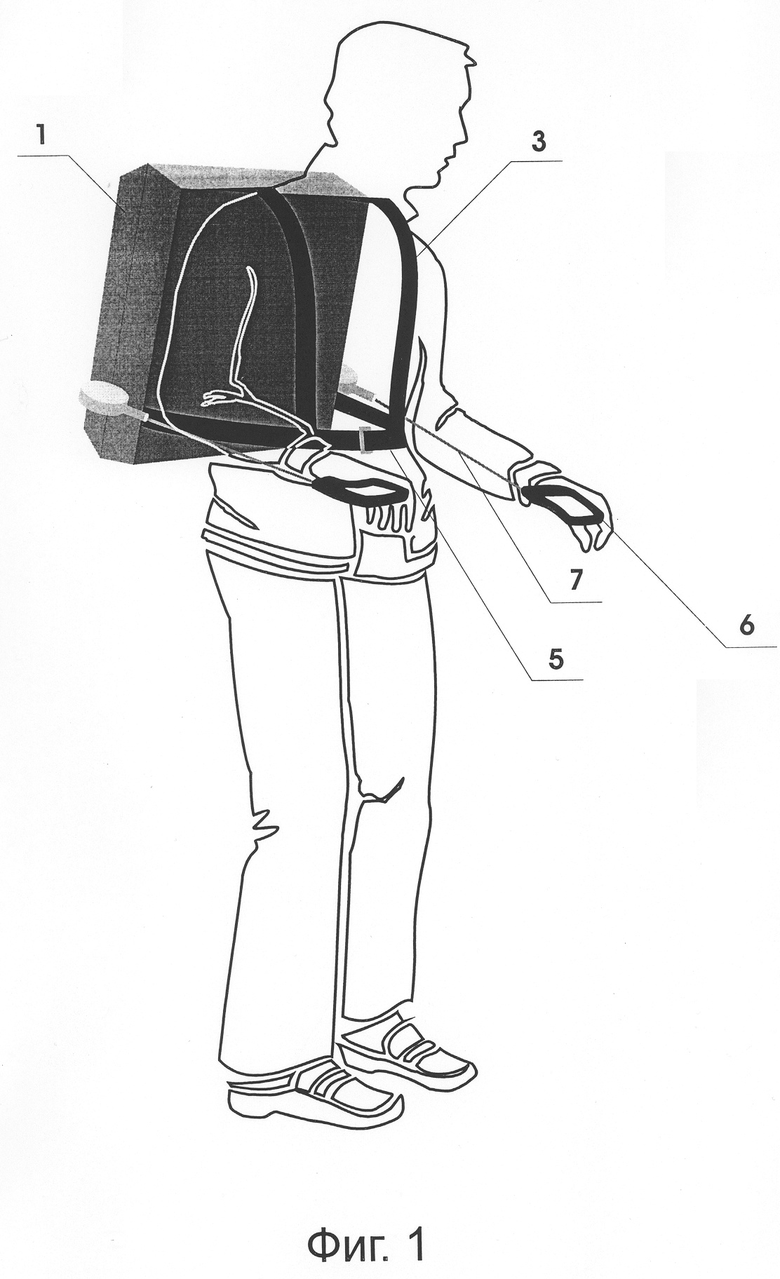
| US 5234394 А, 10.08.1993 | |||
| US 5490824 A, 13.02.1996 | |||
| US 5755650 A, 26.05.1998 | |||
| ПЕРЕНОСНОЙ ОРТОПЕДИЧЕСКИЙ ТРЕНАЖЕР-ЭСПАНДЕР | 1998 |
|
RU2123369C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1991 |
|
RU2033223C1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 5470298 A, 28.11.1995 | |||
| US 5498222 A, 12.03.1996. | |||

