Изобретение относится к области приборостроения. Оно может быть использовано в системах навигации, автоматического управления и стабилизации подвижных объектов - самолетов, плавательных аппаратов, автомобилей и других.
Известны микромеханические гироскопы вибрационного типа (см., например, патент США N 5747690, МПК G 01 P 9/00, от 5 мая 1998 г.) Микрогироскоп включает керамическую подложку, на которой с помощью упругого элемента крепится вибрирующая структура (масса), состоящая из двух частей. Вибрационный кинетический момент передается вибрирующей массе посредством электростатических датчиков силы гребенчатой структуры. Реакцию микрогироскопа на входную угловую скорость измеряют датчики перемещения емкостного типа. Микрогироскоп имеет одну ось чувствительности. Сложность реализации конструкции заключается в том, что очень трудно получить необходимое горизонтальное направление вибрации, т.е. вибрацию в одной плоскости. Реально масса вибрирует как минимум в двух направлениях - в горизонтальном и вертикальном, что снижает добротность и чувствительность гироскопа.
В последние годы в "Draper Laboratory" разработана конструкция микрогироскопа с чувствительным элементом в форме кольца (Л.А. Северов, В.К. Пономарев. А.И. Панферов. "Микромеханические гироскопы: конструкции, характеристики, технологии, пути развития" - Известия ВУЗОВ. Приборостроение N 1-2, 1998 г.). Кольцо с помощью растяжек закрепляется на центральной стойке, связанной с корпусом через упругие элементы. Для возбуждения колебаний здесь также используются электростатические датчики силы, а для съема показаний - емкостный преобразователь.
Упомянутые выше вибрационные микрогироскопы имеют амплитудное значение собственного кинетического момента реально на уровне 10-3 - 10-4 гсмс. Это обстоятельство и обусловливает невысокую точность таких датчиков. Угловая скорость дрейфа производимых микрогироскопов составляет 50-100o/час. (А.М. Лестев, И.В. Попова. "Современное состояние теории и практических разработок микромеханических гироскопов". - Гироскопия и навигация, N 3 (22), 1998 г.).
Наиболее близким по технической сущности к заявляемому техническому решению является динамически настраиваемый гироскоп, предложенный фирмой "General Precision Inc", выполненный по схеме "гирофлекса" с подвесом маховика к ведущему валу посредством утоньшенного вала (патент США N 3584513 G 01 C 19/02). Чувствительный элемент в этой конструкции смонтирован на валу приводного двигателя с помощью гибкой подвески, состоящей из упругого вала-шейки и тарельчатой пружины (мембраны). Такая система обеспечивает равномерность подвески. Вал установлен в двух стандартных радиально-упорных шарикоподшипниках. Электропривод - синхронный гистерезисный. Особенностью этой конструкции является наличие постоянных магнитов, расположенных возле маховика, сила которых подбирается так, чтобы компенсировать упругую силу подвеса, возникающую при отклонении ротора от нейтрального положения. При этом гироскоп по своим свойствам приближается к свободному. Съем показаний осуществляется с помощью двух пар емкостных датчиков перемещения по каждой из двух осей измерения. Недостатками этой конструкции являются большие габаритные размеры, энергопотребление и масса гироскопа, ограничивающие область его применения.
Эта конструкция принята за ближайший аналог.
Задачей изобретения является снижение массы и габаритов динамически настраиваемого гироскопа до величин, сопоставимых с аналогичными параметрами микромеханических гироскопов, а также увеличение точности по сравнению с точностью микромеханических гироскопов.
Решение поставленной задачи достигается за счет того, что в динамически настраиваемом гироскопе, содержащем ротор в виде радиально намагниченного постоянного магнита, имеющего два полюса, с шарикоподшипниковыми опорами подвеса насыпного типа, чувствительный элемент гироскопа - маховик, установленный на валу и соединенный с ведущим валом посредством утоньшенного вала, статор, установленный в плате и содержащий обмотку двигателя, выполнен в виде стекловолоконной конструкции с проводниками, размещенными внутри конструкции вдоль ее образующих, причем выход одной секции соединен со входом другой через посредство торцовых проводников плоского типа, выполненных в виде платы с печатными проводниками, зажимы обмоток соединены с выходами усилителей системы управления двигателем, входы которой соединены с электродами емкостных датчиков положения ротора, представляющих собой, с одной стороны, маску на корпусе в виде двенадцати попарно и диаметрально расположенных площадок на угловом расстоянии в 60o друг от друга, и, с другой стороны, маску на маховике в виде двух диаметрально расположенных площадок, отличающихся друг от друга по площади в два раза, при этом датчик положения ротора конструктивно совмещен с емкостными датчиками угла отклонения маховика гироскопа вокруг измерительных осей за счет выполнения на кольцевой поверхности маховика сплошной маски, образующей совместно с восемью попарно и диаметрально расположенными на угловом расстоянии друг от друга в 90o на плате площадками четыре конденсаторных датчиков угла, включенных попарно в мостовую схему съема сигналов.
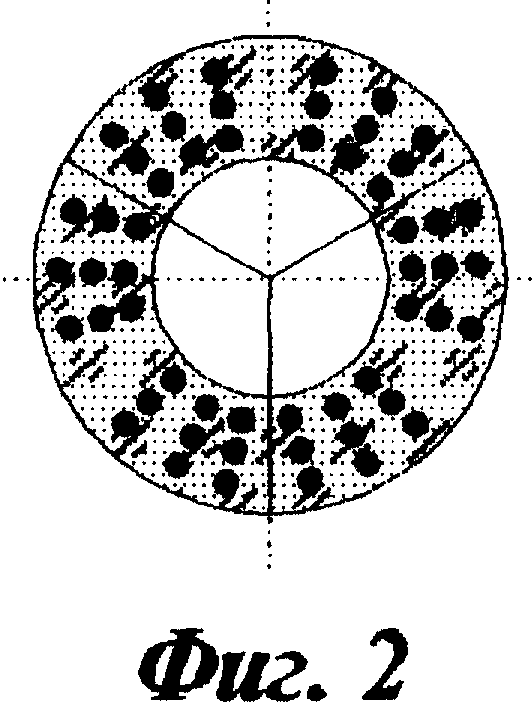
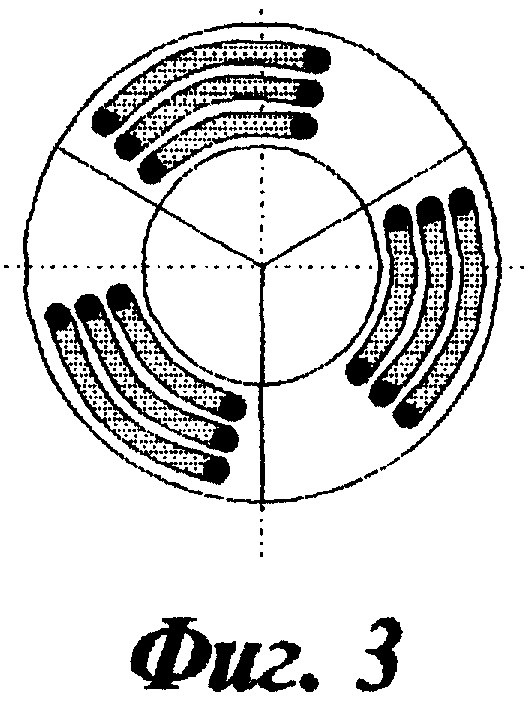
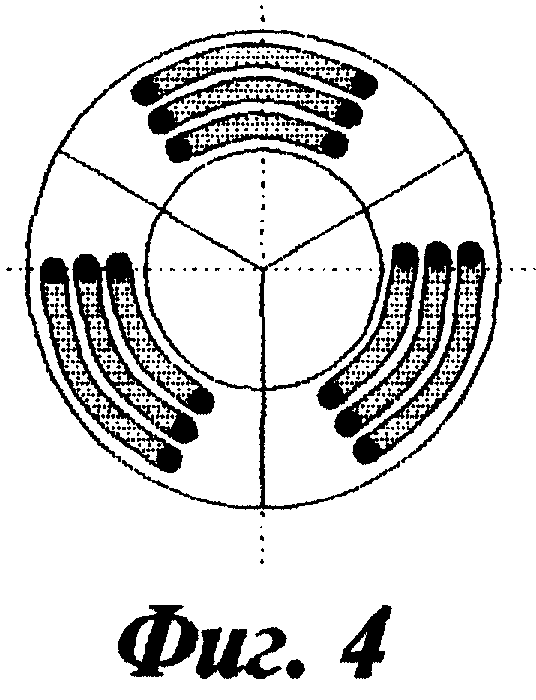
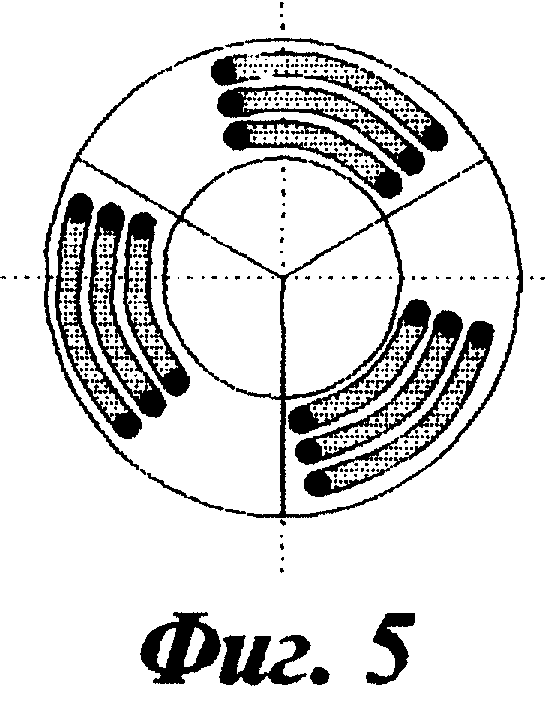
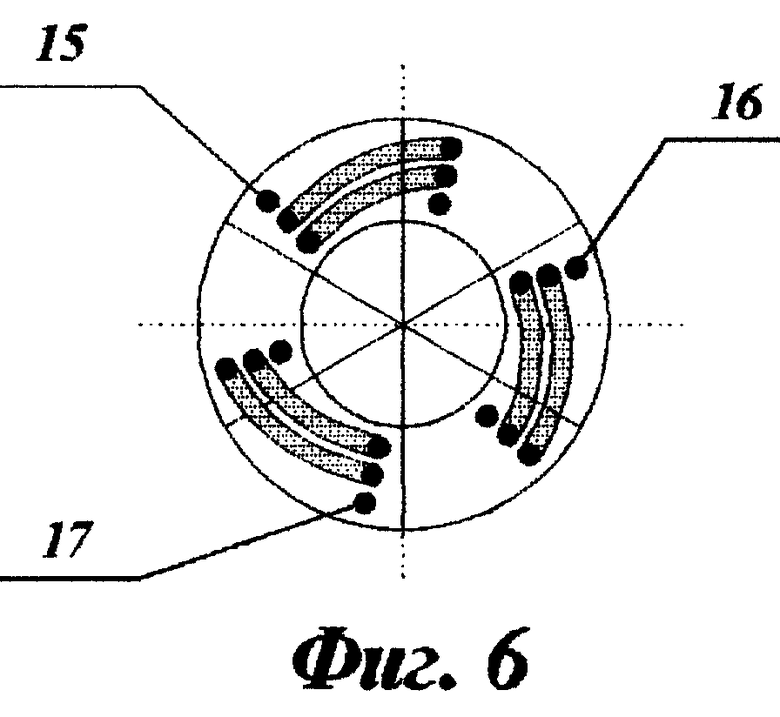
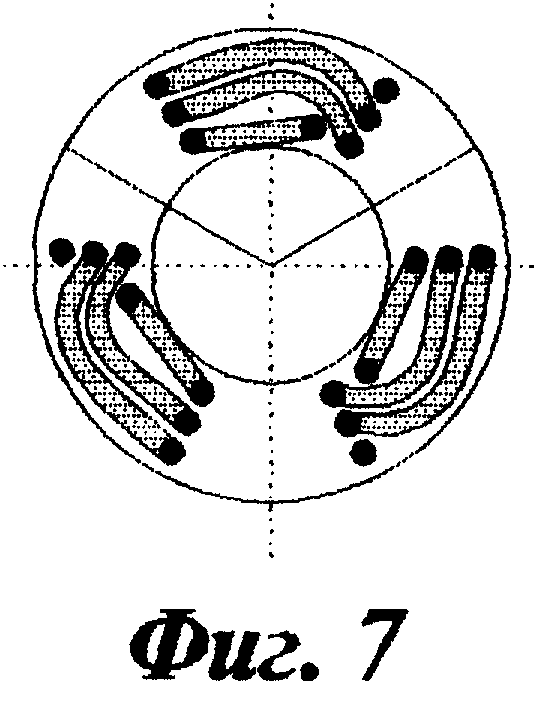
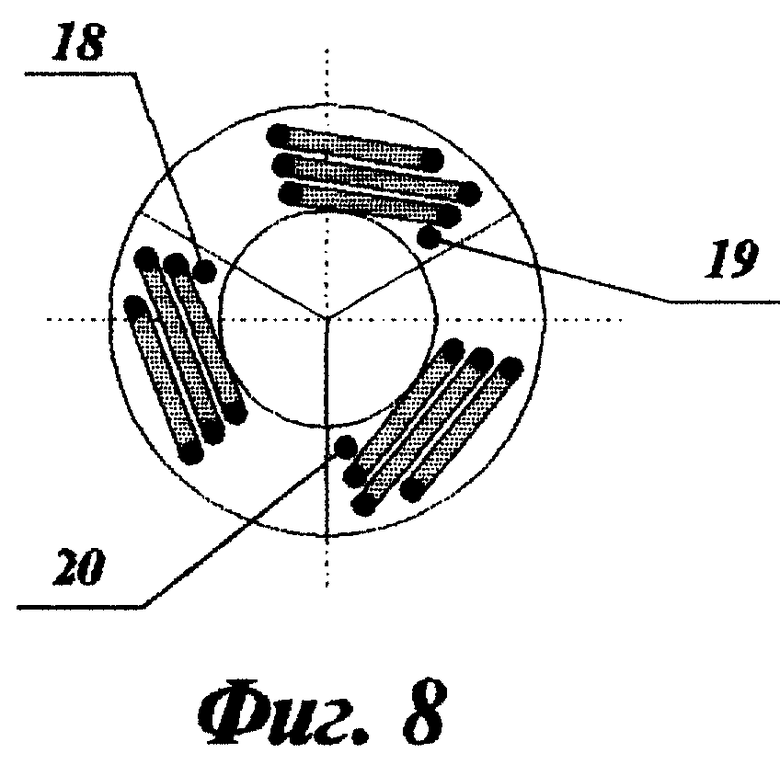
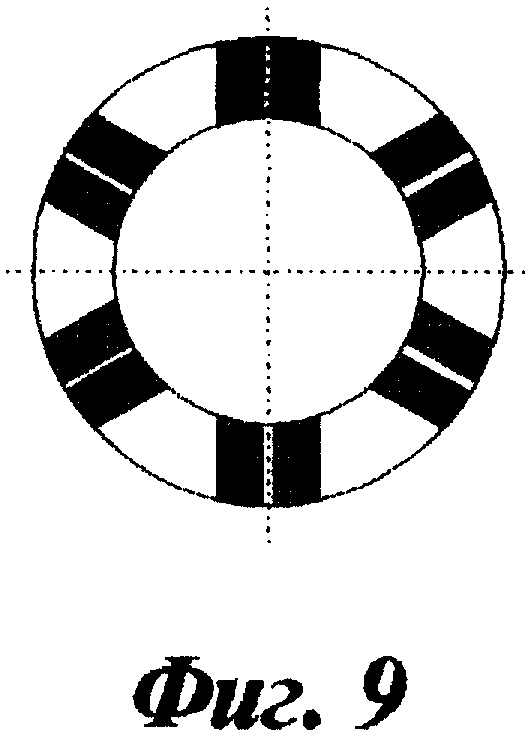
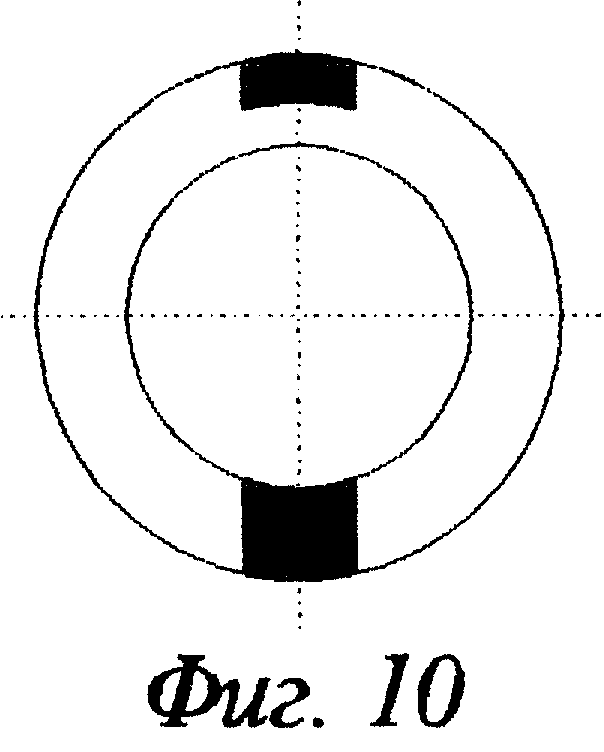
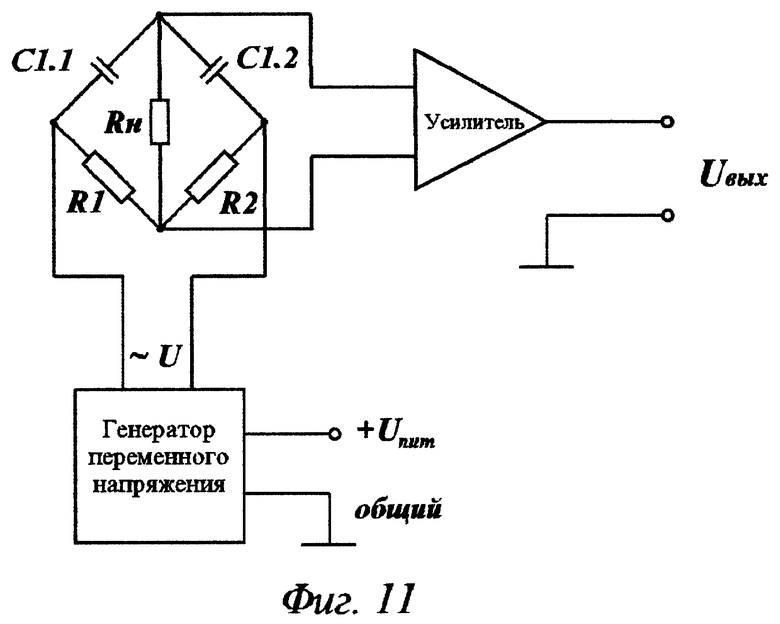
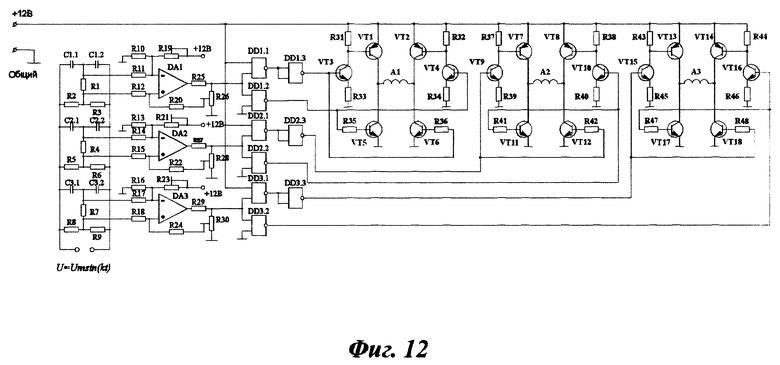
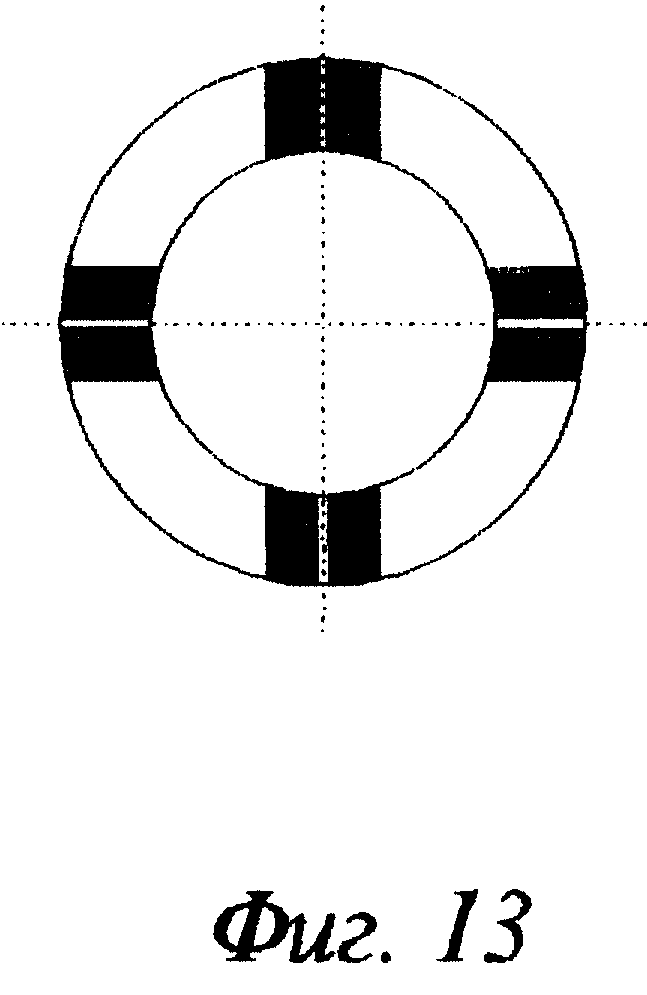
На фиг. 1 представлена конструктивная схема роторного динамически настраиваемого гироскопа, на фиг. 2 - расположение отверстий для проводников в статоре, на фиг. 3 - 5, фиг. 6 - 8 расположение печатных проводников на соединительных платах, на фиг. 9 - маска датчика положения ротора, на фиг. 10 - маска на сплошной поверхности маховика, на фиг. 11 - электрическая схема емкостных датчиков угла, на фиг. 12 - электрическая схема управления электроприводом гироскопа, фиг. 13 - расположение электродов емкостного датчика угла.
Динамически настраиваемый гироскоп (фиг.1) состоит из маховика 1, закрепленного на ведущем валу 2. Маховик соединен с ведущим валом утоньшенным (гибким) валом 3. Ведущий вал закреплен в шарикоподшипниках 4 насыпного типа, установленных в стеклянном статоре 5. Снаружи статора установлена плата 6 с электродом 7 емкостного датчика угла отклонения маховика вокруг каждой из двух перпендикулярных между собой осей измерения. Плату 6 и пластину 8, в которой установлены электроды 9 емкостного датчика положения ротора, соединяет вместе кольцо 10. Электроды 9 расположены попарно на угловом расстоянии в 60o друг от друга. Электроды 9 емкостного датчика положения ротора включены в электрическую схему съема и усиления сигналов положения ротора и управления электроприводом.
Активная часть ротора 11 представляет собой радиально намагниченный постоянный магнит, имеющий два полюса, который в сочетании с тремя секциями обмоток статора и схемой управления представляет собой трехфазный синхронный вентильный двигатель.
Статор 5 электродвигателя изготовлен из специального стекла по технологии, позволяющей изготавливать цилиндрические элементы конструкции со сложной внутренней структурой, в частности, с цилиндрическими отверстиями малого диаметра (патент RU 2085523 МПК C 03 B 37/022 от 6 февраля 1995 г.). Расположение отверстий в статоре показано на фиг. 2. Суть технологического метода - вытягивание стеклянной заготовки с нужной внутренней структурой, при котором достигается сохранение этой структуры при значительном уменьшении диаметра получаемого изделия. По такой технологии возможно изготовление изделий диаметром 50 - 100 мкм при их длине до 4 см. При этом диаметр внутренних отверстий - единицы и даже доли микрон. Применение этой технологии дало возможность значительно уменьшить массу и габариты динамически настраиваемого гироскопа в целом. Цилиндрические отверстия расположены по образующим цилиндрического корпуса статора. В эти отверстия насосом закачивается жидкий металл (например, олово), который потом затвердевает, образуя множество прямолинейных проводников 12. С одного торца корпуса статора 5 эти проводники 12 соединяются между собой в секции посредством плоской торцевой платы 13 с нанесенными на нее в три изолированных друг от друга слоя печатными проводниками, расположение которых на плате показано на фиг. 3, 4, 5 (первый, второй и третий слои соответственно). С другой стороны проводники соединяются с помощью кольцевой платы 14 с печатными проводниками также в три слоя, расположение которых на плате показано на фиг. 6, 7, 8 (первый, второй и третий слой соответственно). Выходы полученных таким образом трех обмоток соединены с коллекторами выходных транзисторов системы управления двигателем с помощью выводов 15, 16, 17, 18, 19, 20, как показано на фиг. 6, 8.
Датчик положения ротора 9 представляет собой пластину с нанесенной на внутренней поверхности маской, как показано на фиг. 9. Из фиг. 9 видно, что датчик представляет собой шесть конденсаторов, расположенных попарно и диаметрально на угловом расстоянии друг от друга в 60o, и служит для создания трехфазного сигнала управления. Конденсаторы образуются совместно с маской на маховике, показанной на фиг. 10. Из фиг. 10 видно, что площадь верхней маски меньше (в 2 раза) площади нижней. Принцип формирования сигнала положения ротора заключается в обеспечении разбалансированности измерительного моста (показан на фиг. 11), в который включены верхний и нижний конденсаторы, за счет различия величин их емкостей. Различие величин емкостей конденсаторов обеспечивается при прохождении возле масок на корпус масок ротора за счет разницы площадей соответствующих масок. В свою очередь, разбалансированность моста приводит к появлению управляющих импульсов на выходах логических элементов DD1.3, DD1.2, DD2.3, DD2.2, DD3.3, DD3.2 (фиг. 12), соответствующим образом коммутирующих обмотки A1, A2, A3 статора для создания вращающегося магнитного поля.
На противоположной стороне маховика нанесен сплошной металлической слой, который совместно с электродами 7 составляет две пары конденсаторов, расположенных на угловом расстоянии 90o, емкость которых может изменяться в зависимости от угла поворота маховика вокруг осей X и Y, и предназначенных для съема сигналов, пропорциональных входным угловым скоростям по осям Y и X. Расположение электрода 7 в плате 6 показано на фиг. 13, а включение конденсаторов в мостовую схему съема сигналов - на фиг. 11.
Работа устройства осуществляется следующим образом. Если действует входная угловая скорость вокруг оси Y, то маховик 1 вследствие действия гироскопического момента отклоняется вокруг оси X. Это отклонение вызывает изменение расстояния между кольцевой поверхностью маховика 1 и электродами 7, составляющими вместе емкостный датчик угла. При этом емкость, например, верхнего на фиг.1 конденсатора увеличивается, а емкость нижнего уменьшается. Эти емкости включены в мостовую схему фиг.11, которая при этом разбалансируется и на ее выходе появляется напряжение, пропорциональное входной угловой скорости.
Вращение маховика 1 с собственной угловой скоростью вызывает появление управляющих импульсов в схеме управления двигателем с емкостных датчиков положения ротора, образованных левой на фиг. 1 поверхностью маховика 1, имеющей маску фиг. 10, и электродами 9 датчика положения ротора, причем за один оборот проходит шесть импульсов. Момент начала импульса соответствует определенному угловому положению маховика 1 по отношению к пластине 8. В соответствии с этим положением схема управления двигателем подключает ту обмотку, прохождение тока по которой в данный момент времени обеспечит максимальный вращающий момент. Когда ротор достигает следующую пару электродов, схема управления подключает следующую обмотку для обеспечения максимального вращающего момента и т.д. Таким образом поддерживается постоянство вращающего момента на валу двигателя и постоянство скорости вращения ротора, что повышает стабильность кинетического момента, а соответственно, и точность гироскопа в целом. Преимущество по точности по сравнению с микромеханическими вибрационными гироскопами достигается также за счет того, что кинетический момент вращающихся частей динамически настраиваемого гироскопа более чем на порядок превышает кинетический момент вибрационного гироскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| МИКРОГИРОСКОП ПРОФЕССОРА ВАВИЛОВА | 2012 |
|
RU2490592C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
Изобретение относится к области приборостроения и может быть использовано в системах навигации, автоматического управления и стабилизации подвижных объектов - самолетов, плавательных аппаратов, автомобилей. Гироскоп содержит ротор в виде радиально намагниченного постоянного магнита с шарикоподшипниковыми опорами подвеса, маховик, установленный на валу и соединенный с ведущим валом посредством утоньшенного вала, статор, содержащий обмотку двигателя. Статор электродвигателя изготовлен из специального стекла по технологии, позволяющей изготавливать цилиндрические элементы конструкции со сложной внутренней структурой, в частности с цилиндрическими отверстиями малого диаметра, что позволило значительно снизить габариты и массу прибора в целом. В результате построения электропривода гироскопа по принципу вентильного электропривода поддерживается постоянство вращающего момента на валу двигателя и постоянство скорости вращения ротора, что повышает стабильность кинетического момента, а соответственно, и точность гироскопа в целом. 13 ил.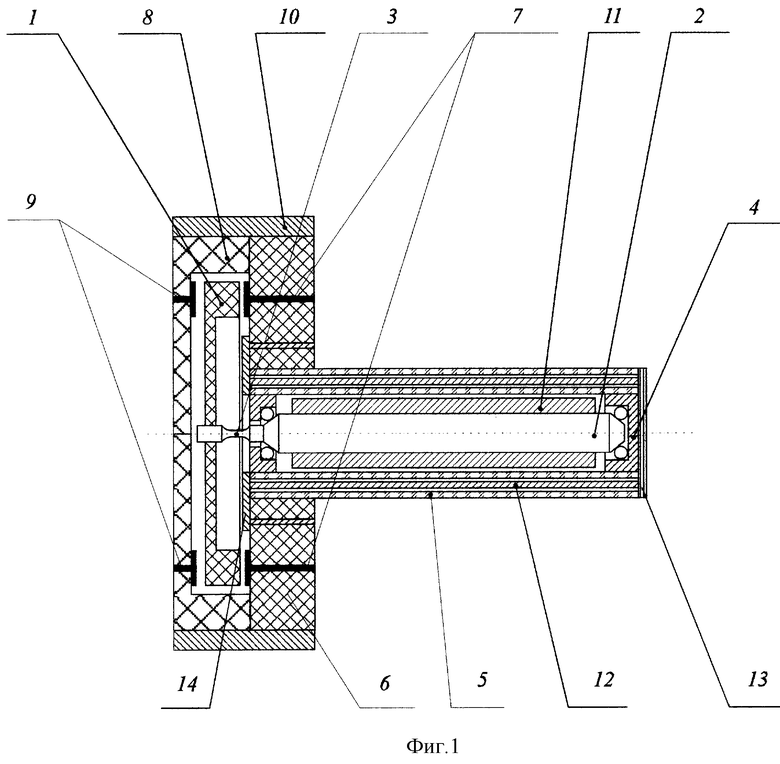
Динамически настраиваемый гироскоп, содержащий ротор в виде радиально намагниченного постоянного магнита, имеющего два полюса, с шарикоподшипниковыми опорами подвеса, чувствительный элемент гироскопа - маховик, установленный на валу и соединенный с ведущим валом посредством утоньшенного вала, статор, установленный в плате и содержащий обмотку двигателя, отличающийся тем, что шарикоподшипниковые опоры ротора гироскопа выполнены насыпными, статор гироскопа выполнен в виде стекловолоконной конструкции с проводниками, размещенными внутри конструкции вдоль ее образующих, причем выход одной секции соединен со входом другой через посредство торцевых проводников плоского типа, выполненных в виде платы с печатными проводниками, нанесенными в три изолированных друг от друга слоя, зажимы обмоток соединены с выходами усилителей системы управления двигателем, входы которой соединены с электродами емкостных датчиков положения ротора, представляющих собой, с одной стороны, маску на корпусе в виде двенадцати попарно и диаметрально расположенных площадок на угловом расстоянии в 60o друг от друга, и, с другой стороны, маску на маховике в виде двух диаметрально расположенных площадок, отличающихся по площади в два раза, при этом датчик положения ротора конструктивно совмещен с емкостными датчиками угла отклонения маховика гироскопа вокруг измерительных осей за счет наличия на кольцевой поверхности маховика сплошной маски, образующей совместно с восемью попарно и диаметрально расположенными на угловом расстоянии друг от друга в 90o на плате площадками четыре конденсатора датчика угла, включенных попарно в мостовую схему съема сигналов.
| US 3584513, 15.06.1971 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1980 |
|
RU2101678C1 |
| DE 4005274 A1, 22.08.1991. | |||
