Предлагаемое изобретение относится к области радиолокации и может быть использовано на вертолетах, дистанционно пилотируемых аппаратах, дирижаблях и других летательных аппаратах для обнаружения воздушных и надводных объектов.
Известны вертолетные радиолокационные станции (РЛС), предназначенные для обзора земной и водной поверхности:
- РЛС AN/APS-94 (США) на вертолете ЕН-60 В системы SOTAS для обнаружения наземных и воздушных объектов в секторе 180([1],
- РЛС "Searchwater" (Великобритания) вертолетного комплекса Sea King для дальнего обнаружения самолетов в секторе 360° [2],
- РЛС "SEASPRAY 2000" (фирма "Маркони", Великобритания) для обнаружения надводных объектов в секторе 360° [3],
-РЛС "Осьминог-Э" (Россия) на вертолете Ка-28 для обнаружения морских объектов в секторе 360° [3].
Известна также вертолетная РЛС для обнаружения малоразмерных наземных и надводных объектов с антенной, встроенной в одну из вращающихся лопастей вертолета [3].
Наиболее близкой к заявляемой РЛС является вертолетная радиолокационная станция "Осьминог-Э", выбранная в качестве прототипа, применяемая на вертолетах Ка-28 и предназначенная для обнаружения морских целей в секторе 360°.
Структурная схема РЛС-прототипа представлена на фиг.1, где:
1 - передающее устройство (ПУ),
2 - локационная антенна (АЛ),
3 - приемное устройство канала локации (ПР),
4 - устройство первичной обработки эхосигналов (УПО),
5 - индикатор (И).
6 - устройство управления антенной (УА).
В прототипе применяется параболическая локационная антенна (АЛ) 2 размером 0,95×0,45 м с круговым вращением, осуществляемым с помощью устройства управления антенной (УА) 6, предназначенная для излучения и приема СВЧ энергии при обзоре морской поверхности. Для формирования электромагнитной энергии применяется магнетронный передатчик. Эта РЛС некогерентна и работает по традиционному принципу. Из передающего устройства (ПУ) 1 СВЧ импульсы с заданной длительностью и частотой повторения подаются на локационную антенну (АЛ) 2 и излучаются в пространство. Отраженные от морских объектов эхосигналы поступают на локационную антенну (АЛ) 2 и далее - на приемное устройство (ПР) 3, затем поступают на устройство первичной обработки эхосигналов (УПО) 4 и далее - на индикатор (И) 5. На второй вход индикатора (И) 5 поступает информация о положении антенны (АЛ) 2 со второго выхода устройства управления антенной (УА) 6.
Общим недостатком приведенных типов РЛС является:
- низкая эффективность обнаружения малоразмерных объектов на фоне интенсивных отражений от подстилающей поверхности, в особенности при обнаружении воздушных объектов на фоне суши,
- отсутствие возможности определения признака государственной принадлежности обнаруженных объектов,
- отсутствие возможности обнаружения постановщиков активных шумовых помех,
- отсутствие защиты от активных шумовых помех,
- отсутствие вторичной обработки радиолокационной информации (РЛИ), следствием чего является необходимость использования специализированных средств связи РЛС с наземным (корабельным) пунктом приема информации и размещения на нем дополнительного оборудования и персонала для обработки принятой радиолокационной информации.
Задачей изобретения является расширение функциональных возможностей РЛС, в том числе повышение эффективности обнаружения малоразмерных воздушных и надводных объектов на фоне моря и суши, обнаружение постановщиков активных шумовых помех, обеспечение помехозащищенности РЛС от воздействия активных шумовых помех, определение признака государственной принадлежности обнаруженных объектов, введение автоматизированной вторичной обработки РЛИ и передачи РЛИ непосредственно на вычислительные средства наземного (корабельного) пункта приема информации с использованием стандартных каналов связи.
Для решения поставленной задачи в предложенную РЛС, состоящую из передающего устройства, антенны, приемного устройства канала локации, устройства первичной обработки информации, индикатора кругового обзора и опорно-поворотного устройства, введены устройство компенсации скорости вертолета, аналого-цифровой преобразователь, устройство вторичной обработки информации, формирователь телекодовой информации, приемно-передающее устройство канала госопознавания и устройство хранения и преобразования картографической информации.
При этом передающее устройство является когерентным и имеет несколько значений несущих частот (рабочих точек), антенна выполнена в виде фазированной антенной решетки размером 6×1 м, в которой совмещены антенны двух различных диапазонов длин волн (локационного и государственного опознавания), устройство первичной обработки информации, устройство вторичной обработки информации и формирователь телекодовой информации выполнены на основе цифровой вычислительной машины, а само устройство первичной обработки информации реализовано по алгоритмам, обеспечивающим первичную обработку не только эхосигналов, но и шумовых активных помех.
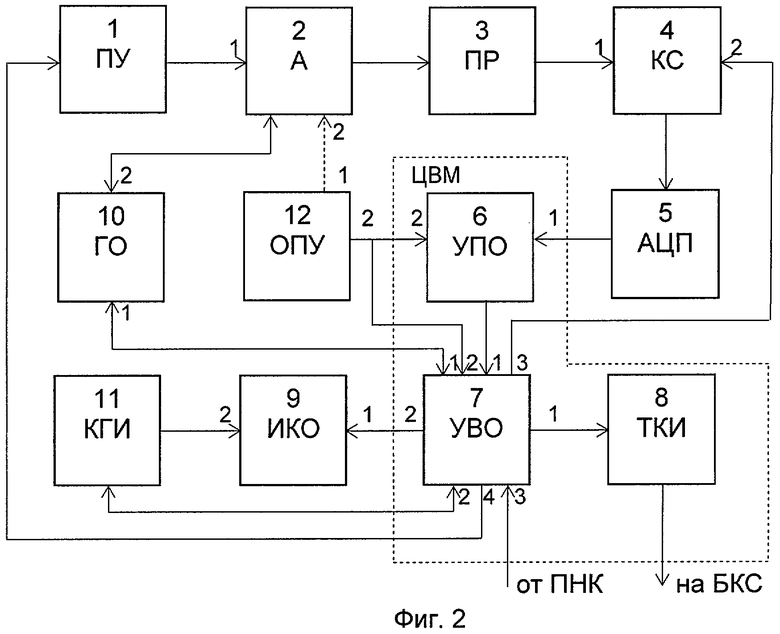
На фиг.2 приведена структурная схема предлагаемой РЛС, где:
1 - передающее устройство (ПУ),
2 - антенна (А),
3 - приемное устройство канала локации (ПР),
4 - устройство компенсации скорости вертолета (КС),
5 - аналого-цифровой преобразователь (АЦП),
6 - устройство первичной обработки информации (УПО),
7 - устройство вторичной обработки информации (УВО),
8 - формирователь телекодовой информации (ТКИ),
9 - индикатор кругового обзора (ИКО),
10 - приемно-передающее устройство канала госопознавания (ГО),
11 - устройство хранения и преобразования картографической информации (КГИ),
12 - опорно-поворотное устройство (ОПУ),
ЦВМ - цифровая вычислительная машина.
На фиг.1 и 2 для упрощения не указаны антенный переключатель (он входит в антенну 2) и связи по сигналам синхронизации и управления аппаратурой РЛС.
Как следует из структурной схемы фиг 2, в состав предлагаемой РЛС входят последовательно соединенные передающее устройство (ПУ) 1, антенна (А) 2, приемное устройство канала локации (ПР) 3, устройство компенсации скорости вертолета (КС) 4, аналого-цифровой преобразователь (АЦП) 5, устройство первичной обработки информации (УПО) 6, устройство вторичной обработки информации (УВО) 7 и формирователь телекодовой информации (ТКИ) 8, выход которого соединен с бортовым комплексом связи (БКС) вертолета и является выходом РЛС, а также индикатор кругового обзора (ИКО) 9, приемно-передающее устройство канала госопознавания (ГО) 10, устройство хранения и преобразования картографической информации (КГИ) 11, опорно-поворотное устройство (ОПУ) 12 и цифровая вычислительная машина (ЦВМ). При этом второй, третий и четвертый выходы УВО 7 соединены соответственно с первым входом ИКО 9, вторым входом устройства КС 4 и входом ПУ 1. Первый вход-выход УВО 7 через ГО 10 соединен с входом-выходом антенны 2, второй вход которой кинематически соединен с первым выходом ОПУ 12, второй выход которого соединен со вторыми входами УПО 6 и УВО 7, третий вход УВО 7 соединен с пилотажно-навигационным комплексом (ПНК) вертолета, а второй вход-выход-с входом-выходом устройства КГИ 11, выход которого соединен с вторым входом ИКО 9.
При этом передающее устройство 1 является когерентным и имеет несколько значений несущих частот (рабочих точек), антенна 2 выполнена в виде фазированной антенной решетки размером 6х1 м, в которой совмещены антенны двух различных диапазонов длин волн, УПО 6, УВО 7 и ТКИ 8 выполнены на основе ЦВМ, кроме того УПО 6 реализовано по алгоритмам, обеспечивающим первичную обработку не только эхосигналов, но и шумовых активных помех.
РЛС работает следующим образом.
Мощные когерентные зондирующие импульсы на одном из значений несущей частоты передающего устройства 1 через антенну 2, вращающуюся с помощью ОПУ 12, излучаются в пространство. Отраженные высокочастотные эхосигналы, а также активные шумовые помехи (при их наличии), принятые антенной 2, поступают в приемное устройство канала локации 3, где после предварительной селекции, усиления и преобразования на промежуточную частоту поступают через устройство КС 4 в АЦП 5. Принцип работы устройства КС 4 заключается в том, что оно по информации, поступающей от УВО 7, формирует доплеровское смещение частоты эхосигнала, обусловленное скоростью движения вертолета (по информации от ПНК вертолета) и текущим азимутальным положением антенны 2 (по информации от ОПУ 12), и затем преобразует эхосигнал с промежуточной на нулевую частоту с компенсацией доплеровской скорости движения вертолета [4]. Это позволяет повысить качество компенсации помех, отраженных от подстилающей поверхности.
После преобразования в цифровой код в АЦП 5 сигнал поступает в УПО 6, где производится обнаружение воздушных и надводных объектов, измерение первичных (относительно осей вертолета) координат (дальности, азимута) и радиальной скорости обнаруженных объектов, защита РЛС от сигналов, отраженных от подстилающей поверхности, обнаружение постановщиков активных шумовых помех и измерение их азимута, а также анализ уровня мощности активных шумовых помех на всех имеющихся в РЛС значениях несущей частоты.
Эта информация выдается в УВО 7, в котором на ее основе, а также на основе информации от ПНК вертолета о координатах, скорости и курсе вертолета производится пересчет значений координат объектов в прямоугольную систему координат относительно условной реперной точки, вычисление значений путевой скорости обнаруженных объектов и их курсового угла. По результатам обработки информации в нескольких обзорах обнаруженный объект автоматически берется на автосопровождение. Кроме того, в УВО 7 осуществляется расчет и выдача в устройство КС 4 данных для компенсации доплеровской составляющей частоты эхосигнала, обусловленной движением вертолета, формирование данных для автоматической перестройки несущей частоты ПУ 1 на рабочую частоту с минимальным уровнем помех, формирование данных для включения запроса госопознавания при поступлении сигналов активного ответа от приемно-передающего устройства канала ГО 10, посылающего и принимающего через антенну 2 сигналы соответственно запроса и активного ответа в своем диапазоне длин волн, производится декодирование сигналов госопознавания и отождествление их с обнаруженным объектом. УВО 7 формирует и выдает необходимую информацию для отображения ее на экране ИКО 9 и для передачи ее в формирователь ТКИ 8, где она кодируется в соответствии с требованиями наземного (корабельного) пункта приема информации и по стандартным средствам радиосвязи передается на наземные и корабельные пункты приема и обработки информации.
Устройство КГИ 11 содержит встроенный приемоизмеритель спутниковой навигационной системы и вычислитель и обеспечивает отображение на ИКО 9 картографической информации заданного района, в котором РЛС осуществляет контроль воздушной и надводной обстановки. Это позволяет уменьшить вероятность завязки ложных трасс при обнаружении воздушных и надводных объектов. Картографическая информация записана в вычислитель КГИ 11 в объеме, достаточном для эксплуатации РЛС в любом полушарии.
Устройства УПО 6, УВО 7 и ТКИ 8 выполнены на основе специализированной многопроцессорной цифровой вычислительной машины (ЦВМ), которая сопряжена с ПНК и БКС вертолета и остальной аппаратурой РЛС. Программы обработки информации и обмена записаны в постоянное запоминающее устройство ЦВМ на предприятии-изготовителе и в процессе эксплуатации РЛС не изменяются.
Таким образом, эффективность применения предложенной РЛС по сравнению с прототипом заключается в расширении ее функциональных возможностей за счет введения в РЛС устройства компенсации скорости вертолета, аналого-цифрового преобразователя, устройства вторичной обработки информации, формирователя телекодовой информации, приемно-передающего устройства канала госопознавания и устройства хранения и преобразования картографической информации, работы передающего устройства в когерентном режиме, что повышает эффективность обнаружения малоразмерных воздушных и надводных объектов на фоне интенсивных отражений от подстилающей поверхности, применения фазированной антенной решетки с большой площадью апертуры и совмещением в ней антенн двух различных диапазонов длин волн для радиолокационного канала и канала госопознавания, использования цифровой вычислительной машины для совместной обработки радиолокационной, помеховой, навигационной, картографической информации и информации канала госопознавания, а также управления режимами работы РЛС, контроля работоспособности ее аппаратуры и формирования информации для передачи на наземные (корабельные) пункты приема информации.
Источники информации
1. Зарубежное военное обозрение, №4, 1982 г.
2. Зарубежное военное обозрение, №4, 1984 г.
3. Патент RU №2206903. "Радиолокационная станция для вертолета". Авторы: Артемьев А.И., Ганюшкин Ю.П., Гуськов Ю.Н., Емельянов Н.Н., Канащенков А.И., Крылышкина В.А.; Михеев С.В., Поцепкин В.Н., Ратнер В.Д. Заявка №2001118738 с приоритетом от 09.07.2001 г., МПК G 01 S 13/00.
4. Патент RU №2231085. "Устройство для компенсации доплеровского сдвига частоты". Авторы: Махрова Н.Н., Милюхин С.В., Мякиньков В.Г, Радаев Е.Ю., Турчина А.И. Заявка №4526981 с приоритетом от 13.02.1990 г., МПК G 01 S 13/58.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2422849C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2661889C1 |
Изобретение относится к области радиолокации и может быть использовано на различных летательных аппаратах для обнаружения воздушных и надводных объектов. Техническим результатом является расширение функциональных возможностей РЛС. Радиолокационная станция кругового обзора для вертолета содержит передающее устройство, антенну, приемное устройство, устройство первичной обработки информации, индикатор кругового обзора и опорно-поворотное устройство, при этом в нее введены устройство компенсации скорости вертолета, аналого-цифровой преобразователь, устройство вторичной обработки информации, формирователь телекодовой информации, приемно-передающее устройство канала госопознавания, устройство хранения и преобразования картографической информации. 2 ил.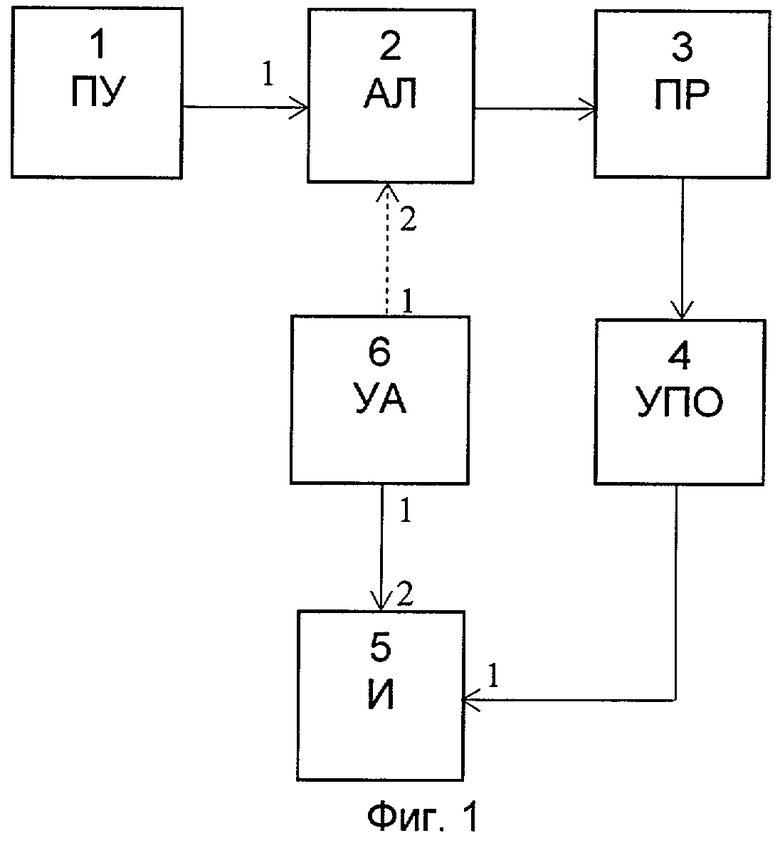
Радиолокационная станция кругового обзора для вертолета, содержащая последовательно соединенные передающее устройство, антенну и приемное устройство канала локации, а также устройство первичной обработки информации, индикатор кругового обзора и опорно-поворотное устройство, первый выход которого кинематически соединен с вторым входом антенны, отличающаяся тем, что в нее введены устройство компенсации скорости вертолета, аналого-цифровой преобразователь, устройство вторичной обработки информации, формирователь телекодовой информации, приемно-передающее устройство канала госопознавания, устройство хранения и преобразования картографической информации, причем выход приемного устройства канала локации через устройство компенсации скорости вертолета и аналого-цифровой преобразователь соединен с первым входом устройства первичной обработки информации, выход которого через первый вход и первый, второй, третий и четвертый выходы устройства вторичной обработки информации соединен, соответственно, с входом формирователя телекодовой информации, выход которого является выходом радиолокационной станции, первым входом индикатора кругового обзора, вторым входом компенсации скорости вертолета и входом передающего устройства, первый вход-выход устройства вторичной обработки информации через приемно-передающее устройство канала госопознования соединен с входом-выходом антенны, второй выход опорно-поворотного устройства соединен с вторыми входами устройств первичной и вторичной обработки информации, третий вход которого соединен с пилотажно-навигационным комплексом вертолета, а второй вход-выход - с входом-выходом устройства хранения и преобразования картографической информации, выход которого соединен с вторым входом индикатора кругового обзора, при этом передающее устройство является когерентным и имеет несколько значений несущих частот, антенна выполнена в виде фазированной антенной решетки, в которой совмещены антенны двух различных диапазонов длин волн, устройство первичной и вторичной обработки информации и формирователь телекодовой информации выполнены на основе цифровой вычислительной машины, а устройство первичной обработки информации реализовано по алгоритмам, обеспечивающим первичную обработку не только эхосигналов, но и шумовых активных помех.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| Вертолетная радиолокационная станция | 1991 |
|
SU1810859A1 |
| US 6577264 A, 10.06.2003 | |||
| DE 3346155 A, 04.07.1985. | |||

