Изобретение относится к области радиолокации, в частности к радиолокационным станциям (РЛС), работающим в трехмиллиметровом диапазоне волн, и может быть использовано для обеспечения безопасной посадки вертолета в условиях отсутствия или ограниченной видимости.
Известно (описание патента RU 2497175 C1 «Система визуализации полета и когнитивный пилотажный индикатор одновинтового вертолета», опубл. 27.10.2013, МПК G06F 3/00, B64D 45/00), что в настоящее время ряд ведущих мировых разработчиков авиационного оборудования ведет активную работу по созданию систем, позволяющих повысить ситуационную осведомленность пилотов вертолетов в условиях отсутствия или ограниченной видимости. В частности, Аэрокосмическая компания Honeywell International разработала новую технологию под названием Enhanced Flight Visual System / Synthetic Vision System (EFVS/SVS) - система улучшенной инструментальной полетной видимости закабинного пространства/система синтезированного видения подстилающей поверхности. Система SVS представляет экипажу базу данных и графическую 3D-визуализацию маршрутов воздушных судов, показывая на индикаторе в схематическом виде поверхность земли, над которой летит воздушное судно, и возможные препятствия на ней.
Новая система EFVS работает с инфракрасными сенсорами и получает реальные данные отображения земной поверхности, накладывая их на данные SVS. Совместно два массива данных позволяют экипажу наблюдать местность в зоне взлета и посадки вертолета.
Отображение информации осуществляется на пилотажных дисплеях Honeywell (IPED), представляющих собой ЖК-экраны, установленные на приборной панели в кабине пилота.
Основными недостатками данной технологи является зависимость от информации, получаемой от спутниковой навигационной системы, а также ограниченные возможности РЖ датчика при действии в сложных метеоусловиях (СМУ) и в условиях снежной (пылевой) пелены, образующейся при посадке вертолета.
Известен патент США №7642929 B1 (опубл. 05.01.2010, МПК G01C 23/00), в котором раскрывается система информационной поддержки экипажа при посадке вертолета. Своим возникновением она обязана военным операциям в Ираке, Саудовской Аравии и Афганистане. Во время посадки вертолет поднимал облако пыли и песка высотой до 100 футов так, что площадка для приземления скрывалась из виду. В соответствии с формулой изобретения вертолет оснащен камерами (например, инфракрасной камерой) и другими датчиками, которые выявляют наличие препятствий на площадке для предотвращения столкновения с ними при приземлении до того, как образуется облако пыли. Сигналы с датчиков поступают в память компьютера. Имеется также инерциальная навигационная система (ИНС), обрабатывающая выходные сигналы системы управления вертолетом. Данные отображаются на обычном экране катодной трубки, либо на индикаторах на лобовом стекле, либо на нашлемных индикаторах.
Основной недостаток данной системы - получение информации производится до осуществления посадки и в процессе снижения истинное расположение внесенных в память объектов может отличаться на величину накопленной ошибки ИНС.
Также известны вертолетные РЛС, предназначенные для обзора земной и водной поверхности (описание патента RU 2289825 C2 «Радиолокационная станция кругового обзора для вертолета», опубл. 20.12.2006, МПК G01S 13/90):
- РЛС AN/APS-94 (США) на вертолете ЕН-60B системы SOT AS для обнаружения наземных и воздушных объектов в секторе 180°;
- РЛС «Seyspray 2000», «Searchwater» (Великобритания) для дальнего обнаружения надводных и воздушных объектов соответственно в секторе 360°.
Вследствие функционирования в X-диапазоне длин волн общими недостатками данных РЛС являются значительные массо-габариты и низкая эффективность обнаружения малоразмерных объектов на фоне отражений от подстилающей поверхности, что обуславливает невозможность их применения для посадки вертолета в условиях ограниченной или отсутствия видимости.
Наиболее близкой к заявляемой РЛС является РЛС «Осьминог-Э» (Россия) для обнаружения морских объектов в секторе 360°, выбранная в качестве прототипа, размером 0,95×0,45 м с круговым вращением (описание патента RU 2206903 C2 «Радиолокационная станция для вертолета», опубл. 20.06.2003, МПК G01S 13/00). Для формирования электромагнитной энергии применяется магнетронный передатчик. РЛС некогерентна, СВЧ импульсы с заданной длительностью и частотой повторения подаются на локационную антенну и излучаются в пространство. Отраженные от объектов эхосигналы поступают в антенну и далее, последовательно, в приемное устройство, устройство обработки и индикатор.
Недостатком прототипа является плохое угловое разрешение антенны, функционирующей в 3-сантиметровом диапазоне, причина которого заключается в ограниченном размере апертуры антенны, который можно реализовать при размещении антенны в ограниченных габаритах фюзеляжа вертолета. Это не позволяет использовать указанную РЛС для посадки вертолета.
Задачей изобретения является создание РЛС с новыми функциями в части обеспечения возможности посадки вертолета, с одновременным снижением массогабаритных размеров для удобства размещения на вертолетах различных типов.
Решение поставленной задачи достигается путем обеспечения функционирования РЛС в 3-мм диапазоне длин волн и ее конструктивного исполнения.
Техническим результатом является обеспечение возможности безопасной посадки вертолета в сложных метеоусловиях, а также при полном отсутствии или ограниченной видимости, при одновременном снижении массогабаритных характеристик РЛС.
Под обеспечением безопасной посадки понимается исключение столкновения вертолета (шасси, хвостовой балки или несущим винтом и др.) с наземными препятствиями (например, мачты, сооружения, фургоны, бочки, линии электропередач, большие камни, кустарник, деревья, крупные животные, люди) при взлете и посадке вертолета днем и ночью, в сложных метеоусловиях (туман, дымка, дождь, снег, запыленность или задымленность атмосферы), а также в условиях поднятой с грунта пыли или снега его вращающимся винтом.
Одновременно с этим обеспечивается определение уклона посадочной площадки, для исключения превышения допустимого предела для конкретного типа вертолета.
Технический результат достигается тем, что в радиолокационной станции кругового обзора для вертолета, содержащей антенное устройство, привод кругового вращения с вращающимся волноводным переходом, приемопередающее устройство, блок обработки информации и радиопрозрачный обтекатель, антенное устройство состоит из вращающейся, отклоненной на фиксированный угол от вертикали антенны рупорного типа с аэродинамическим противовесом, позволяющей при малых габаритах антенны формировать узкую диаграмму направленности антенны (ДНА) в 3-мм диапазоне длин волн, и направленной вертикально вниз неподвижной антенны, выполняющей роль дополнительного канала данных об окружающей обстановке, подключенных к единому приемопередатчику через волноводный переключатель.
Основной принцип функционирования РЛС - обеспечение постоянного обзора земной поверхности в виде кольца под вертолетом излучением вращающейся антенны (рупорного типа) с сужением зоны обзора при снижении вертолета или ее расширением при взлете. При этом осуществляется постоянный контроль высоты над местом посадки излучением через неподвижную антенну в точку посадки или с подтверждением отсутствия (наличия) препятствий в ней.
Коммутация излучаемого/принимаемого КВЧ-сигнала к каждой конкретной антенне от приемопередающего устройства осуществляется посредством волноводно-коммутирующего тракта, который попеременно с высокой частотой подключает к приемопередатчику вращающуюся или неподвижную рупорную антенну через волноводный переключатель.
Основное достоинство РЛС 3-мм диапазона заключается в возможности формирования узкой диаграммы направленности антенны (ДНА) и, соответственно, высокоизбирательного обзора наземной обстановки при незначительных массогабаритных характеристиках РЛС, содержащей малогабаритные антенны рупорного типа.
Сущность предлагаемого технического решения поясняется чертежами, графическими материалами и рисунками:
Фиг. 1 - конструктивное исполнение РЛС;
Фиг. 2 - алгоритм посадки вертолета;
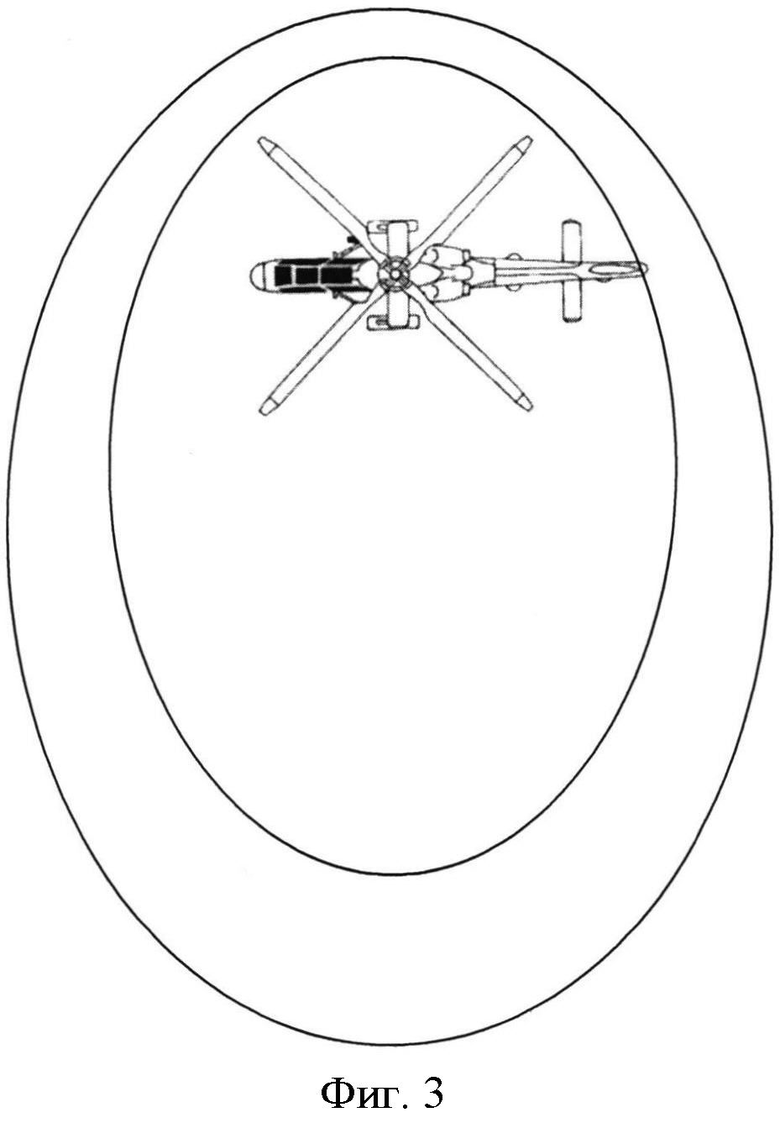
Фиг. 3 - вид сверху осматриваемой зоны при посадке вертолета на наклонную площадку.
Радиолокационная станция кругового обзора конструктивно выполнена в виде моноблока (фиг. 1), размещаемого в нижней части фюзеляжа вертолета. РЛС содержит антенное устройство, состоящее из вращающейся вокруг вертикальной оси и отклоненной на фиксированный угол от вертикали антенны рупорного типа 1 и направленной вертикально вниз неподвижной антенны 2. Подвижная антенна 1, при низких массогабаритных характеристиках, позволяет формировать узкую диаграмму направленности антенны (ДНА) в 3-мм диапазоне длин волн. Неподвижная антенна 2 выполняет роль дополнительного канала данных об окружающей обстановке - расстоянии до поверхности земли и наличии опасных объектов. Для увеличения назначенного ресурса РЛС вращающаяся антенна 1 соединена с массово-аэродинамическим противовесом 3. В состав РЛС входит привод кругового вращения 4 с вращающимся волноводным переходом, приемопередающее устройство 5 и блок обработки информации 6. Подвижная антенна 1 и неподвижная антенна 2 через волноводный переключатель 7 по волноводному переходу подключены к единому приемопередающему устройству 5. Работу радиолокационной станции обеспечивает модуль питания 8. Все элементы РЛС размещены на едином неподвижном основании, закрытом сверху кожухом 9, а снизу - радиопрозрачным обтекателем 10.
РЛС функционирует следующим образом.
После включения блок обработки информации 6 формирует циклограмму работы РЛС, команды на включение привода кругового вращения 4 и приемопередатчика 5. Привод кругового вращения 4 осуществляет круговое вращение антенны 1 с постоянной угловой скоростью. После включения приемопередатчика 5 блок обработки информации 6 формирует управляющие сигналы на приемопередатчик 5, определяющие частоту повторения импульсов, длительность импульса, кодовую последовательность управлением фазы сигнала внутри импульса. Приемопередатчик 5 формирует соответствующий управляющим сигналам КВЧ-импульс. КВЧ-импульс через волноводный переключатель 7 посредством волноводного тракта и вращающегося перехода передается во вращающуюся рупорную антенну 1 и излучается в пространство. Отраженный от наземного объекта или элемента фона земной поверхности КВЧ-импульс поступает в антенну 1 и передается через вращающийся переход, волноводный тракт и волноводный переключатель 7 на вход приемника (находится в составе приемопередатчика 5). В приемопередатчике 5 отраженный КВЧ-импульс детектируется и в аналоговом виде передается в блок обработки информации 6, где производится аналого-цифровое преобразование, когерентное «сжатие» по дальности, когерентное накопление, адаптивная пороговая обработка. Из полученной матрицы «азимут-дальность-скорость-уровень отраженного сигнала» формируется изображение в установленном формате на индикатор, содержащее либо РЛ-изображение осматриваемого пространства, либо РЛ-изображение осматриваемого пространства совместно со сформированными пиктограммами опасных объектов. Изображение на индикатор формируется с учетом накопления информации от нескольких последовательных обзоров (поворотов вращающейся антенны 1 на 360°) и постоянно пересчитывается в связанную систему координат летательного аппарата по мере его пространственного перемещения.
При работе через неподвижную антенну рупорного типа 2 функционирование РЛС происходит аналогично описанному выше, только КВЧ-импульс поступает из приемопередатчика 5 через волноводный переключатель 7 и соответствующий волноводный тракт в неподвижную антенну 2. Отраженный КВЧ-импульс поступает в неподвижную антенну 2 и передается через волноводный тракт и волноводный переключатель 7 на вход приемника (находится в составе приемопередатчика 5). В приемопередатчике 5 отраженный КВЧ-импульс детектируется и в аналоговом виде передается в блок обработки информации 6, где производится аналого-цифровое преобразование, когерентное «сжатие» по дальности, когерентное накопление, адаптивная пороговая обработка. Из полученной матрицы «дальность-скорость-уровень отраженного сигнала» формируется «строка высоты» в связанной системе координат летательного аппарата, после обработки «строки высоты» на индикатор выдается расстояние до земной поверхности (по нормали к горизонтальной плоскости летательного аппарата) и сигнал о наличии опасного объекта, если в «строке высоты» обнаружен объект протяженностью в несколько элементов разрешения.
Полученная и обработанная РЛС информация об окружающей обстановке отражается на многофункциональном индикаторе (МФИ) в кабине пилота с выделением цветом наиболее опасных приближающихся к вертолету объектах, с которыми возможно столкновение.
Посадка вертолета осуществляется следующим образом.
1. В случае посадки с предварительным заходом на взлетно-посадочную площадку (ВППл) по визуальным ориентирам предварительный заход к месту посадки производится пилотом в штатном режиме по визуальным ориентирам на высотах более 30 м. После выбора места посадки производится зависание над ВППл и вертикальное снижение (посадка по вертолетному без использования влияния воздушной подушки) (фиг. 2). Контроль процесса снижения осуществляется в том числе путем включения и отслеживания информации от РЛС, выдаваемой в виде изображения осматриваемой поверхности земли с имеющимися на ней опасными объектами (постройками, мачтами, проводами, машинами, людьми и др.) и расстояниями до них от вертолета. При этом в зоне обзора РЛС будет отсутствовать центральная часть (ее размер при угле наклона антенны α=30° и при высоте ~35 м может составить до 200 м в диаметре). Диаметр внешней границы осматриваемой поверхности при этом составит 340…350 м. При дальнейшем снижении вертолета осматриваемая зона будет уменьшаться, однако на МФИ ее размеры могут оставаться прежними (в том числе с обнаруженными и внесенными в память системы объектами). При этом недосматриваемая «слепая» зона будет уменьшаться, на высоте 17 м она составит ~100 м в диаметре, а на высоте 5 м - соответственно ~30 м. Все новые объекты, попавшие в зону осмотра РЛС при снижении, также отображаются на МФИ. В случае непреднамеренного сноса вертолета при потере визуальной видимости в условиях пылевой (снежной) пелены предлагается наряду с отображаемой пилоту информацией на МФИ предусмотреть квадро-стерео звуковую сигнализацию об объектах, представляющих в условиях такого сноса наибольшую опасность, с изменением тональности (прерывности) сигнала по мере приближения к объекту (объектам). При приближении к поверхности земли, в том числе по показаниям высоты от РЛС, производится выход на необходимую вертикальную скорость и посадка.
2. В случае посадки в условиях ограниченной или отсутствия видимости - сложных метеоусловиях (туман, дождь, снег и т.д.), не представляется возможным осуществить визуальный заход на ВППл (или на площадку, подобранную с воздуха). В связи с этим, поиск места посадки осуществляется по информации от инерциальной навигационной системы (ИНС) и предлагаемой РЛС. При этом после выхода в расчетную точку нахождения ВППл по данным навигационной системы осуществляется снижение до высоты ~30 м (или другой безопасной высоты), включение РЛС и радиолокационный осмотр земной поверхности. Вертолет перемещается горизонтально, не снижаясь, зона осмотра, соответственно, представляет собой перемещающееся кольцо с внешним радиусом более 300 м. Обнаруженные объекты вносятся в память системы и отображаются на многофункциональном индикаторе даже при попадании в недосматриваемую центральную зону (диаметром ~200 м) с учетом перемещения вертолета относительно земли и других объектов, то есть зона осмотра представляет собой полосу шириной 300…600 м (в зависимости от высоты полета). При таком алгоритме действий представляется возможным осуществить поиск и обнаружение ВППл, или места посадки, свободного от представляющих опасность объектов. Далее производится зависание и приземление по информации от РЛС аналогично предыдущему алгоритму.
В случае имеющегося наклона площадки относительно горизонта осматриваемая зона будет представлять из себя овал со смещением в сторону от расчетной точки посадки (фиг. 3), что при известном угле вертолета от вертикали (по данным от ИНС) позволяет принимать решение о возможности дальнейшей посадки по имеющимся эксплуатационным ограничениям.
Необходимо отметить, что возможности РЛС позволяют не только обнаруживать объекты с необходимыми характеристиками точности и разрешающей способности, но и осуществлять информирование экипажа о непреднамеренном сносе по информации о перемещении относительно объектов и фона, а также о скорости такого перемещения. Кроме того, экипаж постоянно информируется о высоте полета по данным от антенны, постоянно направленной вниз (в данном случае выполняющей роль радиовысотомера).
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННОЕ УСТРОЙСТВО ОБЗОРА | 2016 |
|
RU2642895C1 |
| СПОСОБ НАВИГАЦИИ, ПОСАДКИ И ВЗЛЕТА ВЕРТОЛЕТА | 2014 |
|
RU2578202C1 |
| УСТРОЙСТВО ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЁТНОГО ТИПА | 2019 |
|
RU2737760C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| МНОГОДИАПАЗОННЫЙ ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2497145C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |

Изобретение относится к области радиолокации и может быть использовано для обеспечения безопасной посадки вертолета в условиях отсутствия или ограниченной видимости. Достигаемый технический результат - обеспечение безопасной посадки вертолета в сложных метеоусловиях, а также при полном отсутствии или ограниченной видимости, при одновременном снижении массогабаритных характеристик радиолокационной станции (РЛС). Указанный результат достигается за счет того, что РЛС содержит антенное устройство, привод кругового вращения с вращающимся волноводным переходом, приемопередающее устройство, блок обработки информации и радиопрозрачный обтекатель, при этом антенное устройство состоит из вращающейся отклоненной на фиксированный угол от вертикали антенны рупорного типа с противовесом, позволяющей при малых габаритах антенны формировать узкую диаграмму направленности антенны в 3-мм диапазоне длин волн, и направленной вертикально вниз неподвижной антенны, выполняющей роль дополнительного канала данных об окружающей обстановке, подключенных к единому приемопередатчику через волноводный переключатель. 3 ил.
Радиолокационная станция кругового обзора для вертолета, содержащая антенное устройство, привод кругового вращения с вращающимся волноводным переходом, приемопередающее устройство, блок обработки информации, радиопрозрачный обтекатель, отличающаяся тем, что антенное устройство состоит из вращающейся отклоненной на фиксированный угол от вертикали антенны рупорного типа с противовесом, позволяющей при малых габаритах антенны формировать узкую диаграмму направленности антенны (ДНА) в 3-мм диапазоне длин волн, и направленной вертикально вниз неподвижной антенны, выполняющей роль дополнительного канала данных об окружающей обстановке, подключенных к единому приемопередатчику через волноводный переключатель.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410718C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВЕРТОЛЕТА В КРИТИЧЕСКИХ РЕЖИМАХ ПИЛОТИРОВАНИЯ | 2010 |
|
RU2445234C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1998 |
|
RU2156985C2 |
| WO 2001065273 A1, 07.09.2001 | |||
| FR 2932279 A1, 11.12.2009 | |||
| WO 1999046831 A1, 16.09.1999 | |||
| US 20140062755 A1, 06.03.2014 | |||

