Изобретение относится к подводным судам, преимущественно к подводным аппаратам (ПА), предназначенным для освоения и исследования морских глубин.
Одной из важнейших составных частей ПА является двигательно-движительная установка, в значительной мере определяющая быстроту и качество выполняемых ПА работ.
Известен ПА "Скат-гео", содержащий корпус и кормовую движительную установку, включающую четыре маршевых движителя, размещенных попарно в плоскостях горизонтального и вертикального стабилизаторов. (Агеев М.Д., Касаткин Л.В. и др. Автоматические подводные аппараты. Л.: Судостроение, 1981 г., стр. 193-194).
Особенностью движительной установки ПА "Скат-гео" является расположение всех четырех движителей под углом к продольной оси аппарата, что позволяет использовать их как в качестве маршевых движителей, так и для выполнения маневров в вертикальной и горизонтальной плоскостях.
Однако ПА "Скат-гео" не обладает высокой эффективностью управления в вертикальной плоскости в случаях, когда требуется быстро изменить глубину его погружения.
Наиболее близким к заявляемому изобретению по своему назначению, технической сущности и достигаемому техническому результату является ПА "AQUA EXPLORER 2", содержащий корпус, кормовую движительную установку, включающую два маршевых реверсивных движителя, размещенных в горизонтальной плоскости под углом к продольной оси аппарата по разные стороны от оси и два носовых руля глубины (AQUA EXPLORER 2. http://www.lab.kdd.co.jp/kdd/lab/marine/ENGLISH/AE2spec.html).
В горизонтальной плоскости (по курсу) ПА "AQUA EXPLORER 2" управляется маршевыми движителями, а в вертикальной (по глубине) - носовыми рулями глубины.
ПА "AQUA EXPLORER 2" обладает высокой эффективностью управления в вертикальной плоскости, но только при относительно больших скоростях его движения. При малых скоростях движения низкая эффективность управления ПА "AQUA EXPLORER 2" в вертикальной плоскости не обеспечивает выполнение требуемого режима движения, связанного с необходимостью быстрого изменения глубины погружения.
В основу изобретения поставлена задача создать ПА, эффективно управляемый в горизонтальной и вертикальной плоскостях во всем диапазоне рабочих скоростей и обладающий особенно повышенной маневренностью в вертикальной плоскости (по глубине).
Заявляемый ПА повышенной маневренности эффективно управляется в горизонтальной и вертикальной плоскостях во всем диапазоне рабочих скоростей и обладает повышенной маневренностью в вертикальной плоскости (по глубине).
ПА содержит корпус и кормовую движительную установку, включающую размещенный в горизонтальной плоскости перпендикулярно к продольной оси ПА баллер с реверсивным приводом, обеспечивающим возможность возвратно-поворотных движений баллера относительно его продольной оси, и неподвижно размещенные на баллере под углом к продольной оси аппарата по разные стороны от нее два маршевых реверсивных движителя.
Заявляемый ПА повышенной маневренности имеет следующие общие с наиболее близким аналогом (прототипом) признаки:
1. Подводный аппарат.
2. Содержит корпус.
3. Содержит кормовую движительную установку.
4. Включающую два маршевых реверсивных движителя.
5. Размещенных в горизонтальной плоскости.
6. Под углом к продольной оси аппарата.
7. По разные стороны от оси.
Отличительными от прототипа признаками заявляемого ПА повышенной маневренности, обеспечивающими совместно с их общими признаками получение указанного технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны, являются:
1. Снабжение движительной установки подводного аппарата баллером.
2. Размещение баллера в горизонтальной плоскости перпендикулярно к продольной оси подводного аппарата.
3. Оборудование баллера реверсивным приводом, обеспечивающим возможность возвратно-поворотных движений баллера относительно его продольной оси.
4. Размещение маршевых движителей неподвижно на баллере.
Снабжение движительной установки ПА размещенным в горизонтальной плоскости перпендикулярно к продольной оси ПА баллером с реверсивным приводом, обеспечивающим возможность возвратно-поворотных движений баллера относительно его продольной оси, а также неподвижное размещение маршевых реверсивных движителей на баллере позволило повысить эффективность управления ПА в горизонтальной и вертикальной плоскостях во всем диапазоне его рабочих скоростей и обеспечить особенно повышенную маневренность ПА в вертикальной плоскости (по глубине).
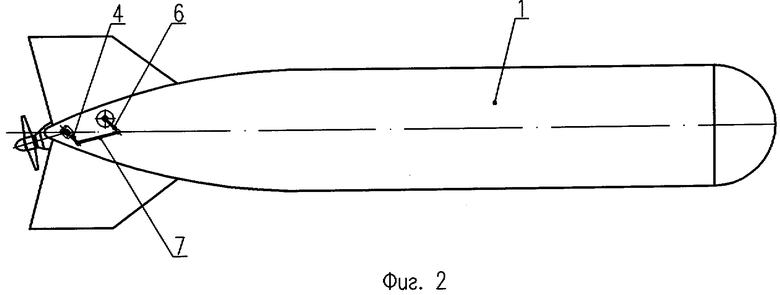
На фиг.1 изображен заявляемый подводный аппарат (ПА) повышенной маневренности (вид сверху).
На фиг.2 изображен заявляемый подводный аппарат (ПА) повышенной маневренности (вид сбоку).
Примером конкретного выполнения заявляемого подводного аппарата повышенной маневренности является подводный аппарат, содержащий корпус 1 и кормовую движительную установку, включающую размещенный в горизонтальной плоскости перпендикулярно к продольной оси подводного аппарата баллер 2 и неподвижно размещенные на баллере под углом к продольной оси аппарата по разные стороны от нее два маршевых реверсивных движителя 3. Баллер 2 снабжен румпелем 4 и реверсивным приводом, обеспечивающим возможность возвратно-поворотных движений баллера относительно его продольной оси, включающим электродвигатель 5, рычаг 6 и шток 7, шарнирно соединенный одним своим концом с рычагом 6, а вторым - с румпелем 4.
Заявленное изобретение осуществляется с реализацией указанного назначения и с достижением указанного технического результата следующим образом.
Подготовленный к работе ПА опускают с судна-носителя на поверхность воды. Имея относительно небольшую положительную плавучесть, корпус 1 ПА практически весь погружается в воду. При поступлении в движительную установку команды "движение вперед" одновременно с одинаковым числом оборотов включаются маршевые реверсивные движители 3, обеспечивая движение ПА вперед по заданному курсу. Для выполнения маневра ПА по курсу при его движении вперед на маршевые реверсивные движители 3 подается соответствующая команда, обеспечивающая работу их с разным числом оборотов.
Для выполнения маневра по глубине подается соответствующая команда на электродвигатель 5, который, поворачивая рычаг 6, двигает шток 7, шарнирно соединенный своими концами с рычагом 6 и с румпелем 4, и обеспечивает, таким образом, поворот баллера 2 с неподвижно закрепленными на нем маршевыми реверсивными движителями 3.
Перемещение ПА повышенной маневренности задним ходом в горизонтальной и вертикальной плоскостях осуществляется по соответствующим командам аналогично командам при движении аппарата вперед.
Заявляемый ПА повышенной маневренности эффективно управляется в горизонтальной и вертикальной плоскостях во всем диапазоне рабочих скоростей и обладает особенно повышенной маневренностью в вертикальной плоскости (по глубине), что обусловлено необходимостью обхода подводных препятствий при выполнении телевизионной съемки вблизи дна.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2020 |
|
RU2746094C1 |
| Подводный аппарат | 2020 |
|
RU2754164C1 |
| ПОДВОДНЫЙ АППАРАТ ПОВЫШЕННОЙ МАНЕВРЕННОСТИ | 1996 |
|
RU2101210C1 |
| ВЫСОКОМАНЕВРЕННЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2112694C1 |
| ПОДВОДНЫЙ АППАРАТ | 2000 |
|
RU2172699C1 |
| Подводный аппарат | 2023 |
|
RU2823828C1 |
| ПОДВОДНЫЙ АППАРАТ ПОВЫШЕННОЙ МАНЕВРЕННОСТИ | 2014 |
|
RU2547102C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2434780C2 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
Изобретение относится к судостроению и касается создания подводных судов, преимущественно подводных аппаратов, предназначенных для освоения и исследования морских глубин. Подводный аппарат повышенной маневренности имеет корпус и кормовую движительную установку. Движительная установка включает в себя два маршевых реверсивных движителя, которые размещены в горизонтальной плоскости под углом к продольной оси аппарата по разные стороны от оси. Движительная установка подводного аппарата дополнительно снабжена размещенным в горизонтальной плоскости перпендикулярно к продольной оси подводного аппарата баллером с реверсивным приводом, обеспечивающим возможность возвратно-поворотных движений баллера относительно его продольной оси. Маршевые реверсивные движители неподвижно размещены на баллере. Технический результат реализации изобретения заключается в эффективном управлении аппаратом в горизонтальной и вертикальной плоскостях во всем диапазоне рабочих скоростей при повышенной маневренности в вертикальной плоскости (по глубине), что обусловлено необходимостью обхода подводных препятствий при выполнении телевизионной съемки вблизи дна акватории. 2 ил.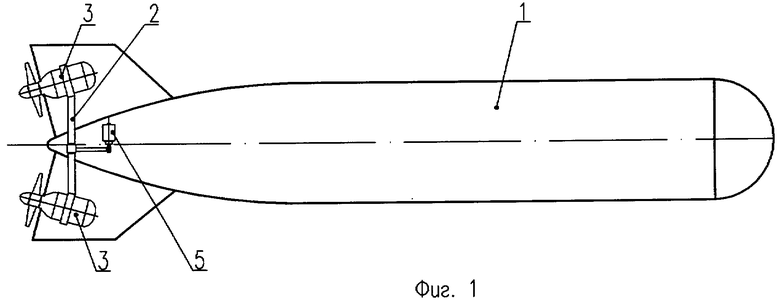
Подводный аппарат повышенной маневренности, содержащий корпус и кормовую движительную установку, включающую два маршевых реверсивных движителя, размещенных в горизонтальной плоскости под углом к продольной оси аппарата по разные стороны от оси, отличающийся тем, что кормовая движительная установка дополнительно снабжена размещенным в горизонтальной плоскости перпендикулярно продольной оси подводного аппарата баллером с реверсивным приводом, обеспечивающим возможность возвратно-поворотных движений баллера относительно его продольной оси, а маршевые реверсивные движители неподвижно размещены на баллере.
| Самоходные необитаемые подводные аппараты | |||
| Под общей редакцией И.Б.Иконникова | |||
| Л., Судостроение, 1986, с.14, рис.1.6 | |||
| US 3521589 А, 21.07.1970. |

