Изобретение относится к подводному судостроению, в частности к подводным аппаратам, как обитаемым, так и необитаемым и может быть использовано на подводных аппаратах научного, промышленного или спасательного назначения.
Известны подводные аппараты, предназначенные для научного, промышленного или спасательного назначения, например по патентам РФ №№2310579, 2276647, МПК B63G 8/00.
Известен подводный аппарата по патенту РФ №2290338, 2004 г., содержащий корпус и кормовую движительную установку. Движительная установка включает в себя два маршевых реверсивных движителя, неподвижно закрепленные на баллере и расположены в кормовой части подводного аппарата. Известное техническое решение по патенту РФ №2290338 обеспечивает эффективное управление подводного аппарата в горизонтальной и вертикальной плоскости.
Известен подводный аппарат по патенту РФ №2172699, B63G 8/00, 2000 г. включающий прочный корпус с оборудованием, легкий корпус, движительно-рулевой комплекс в составе двух кормовых маршевых винтов в насадках, двух бортовых винтов вертикального перемещения размещенных в трубах, винтов поперечного перемещения и дифферентную систему с балластом. Кормовые маршевые винты размещены в колонках, установленных с возможностью поворота в вертикальной плоскости, что повышает маневренность подводного аппарата.
Известное техническое решение по патенту РФ №2172699, B63G 8/00, 2000 г. принято в качестве прототипа.
Недостатком технического решения, принятого за прототип является сложность обеспечения маневрирования в горизонтальной и вертикальной плоскостях для чего необходимо использовать специальные винты горизонтального или вертикального перемещения, невозможность обеспечения маневрирования на малых ходах только с использование маршевых винтов.
Цель изобретения - устранение указанного недостатка, а именно - упрощение маневрированием подводного аппарата в вертикальной и горизонтальной плоскостях на малых ходах с использованием маршевых винтов.
Указанная цель достигается тем, что в отличие от прототипа один из кормовых маршевых винтов размещен на кронштейне с приводом разворота на 90° в горизонтальной плоскости, другой кормовой маршевый винт размещен на кронштейне с приводом разворота на 90° в вертикальной плоскости.
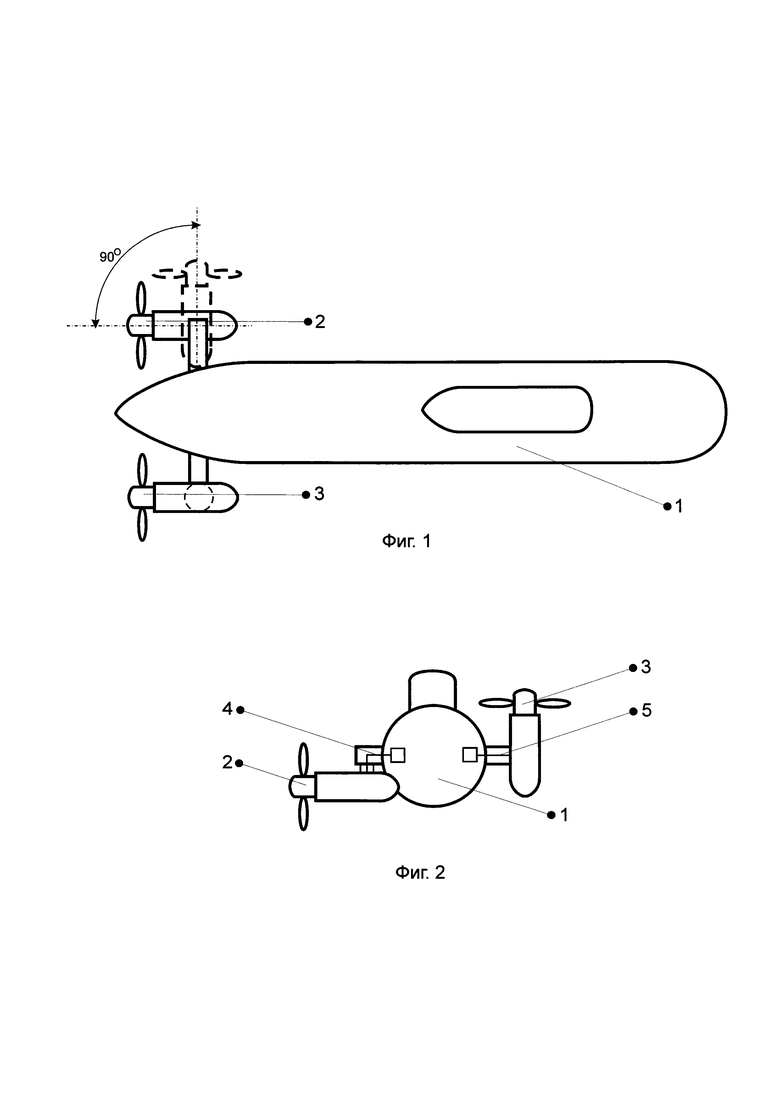
Предложенное техническое решение поясняется чертежом, где на Фиг. 1 показан подводный аппарат, вид сверху. На Фиг. 2 подводный аппарат, вид сзади, кормовые маршевые винты развернуты на 90°, левый винт в горизонтальной плоскости, правый вин в вертикальной плоскости.
Подводный аппарат включает корпус 1, левый 2 и правый 3 кормовые маршевые винты, например, реверсивного типа, установленные на кронштейны с приводами 4, 5 разворота на 90°, например, левого маршевого винта в горизонтальной плоскости, а правого маршевого винта в вертикальной плоскости.
В штатном положении плоскости кормовых маршевых винтов 2, 3 установлены перпендикулярно диаметральной плоскости подводного аппарата. При необходимости осуществления маневра по глубине разворачивают один маршевый винт 3, например, правый на 90°, при необходимости осуществления маневра по курсу разворачивают один маршевый винт 2, например, левый 90°. При необходимости одновременного маневра по глубине и по курсу разворачивают оба маршевых винта. При развороте винтов на угол меньше 90° одновременно обеспечивается и ход подводного аппарата.
Таким образом, отличительные признаки предложенного технического решения обеспечивают достижение цели, а именно - упрощение маневрированием подводного аппарата в вертикальной и горизонтальной плоскостях на малых ходах с использованием маршевых винтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2020 |
|
RU2746094C1 |
| Подводный аппарат с системой стабилизации над подводным объектом | 2020 |
|
RU2749466C1 |
| ПОДВОДНЫЙ АППАРАТ | 2000 |
|
RU2172699C1 |
| ВЫСОКОМАНЕВРЕННЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2112694C1 |
| Движительный комплекс подводного объекта | 2023 |
|
RU2827383C1 |
| Подводный аппарат со стабилизатором глубины погружения без хода | 2020 |
|
RU2746205C1 |
| Спасательный подводный аппарат | 2018 |
|
RU2736236C2 |
| ПОДВОДНЫЙ АППАРАТ ПОВЫШЕННОЙ МАНЕВРЕННОСТИ | 1996 |
|
RU2101210C1 |
| Спасательный подводный аппарат со стабилизатором глубины погружения без хода | 2020 |
|
RU2754166C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
Изобретение относится к подводному судостроению, в частности к подводным аппаратам. Подводный аппарат включает корпус с устройствами и движительно-рулевой комплекс, состоящий из двух кормовых маршевых винтов, размещенных с возможностью разворота. Один из кормовых маршевых винтов размещен на кронштейне и снабжен приводом разворота на 90° в горизонтальной плоскости, другой кормовой маршевый винт размещен на кронштейне и снабжен приводом разворота на 90° в вертикальной плоскости. Достигается упрощение маневрированием подводного аппарата в вертикальной и горизонтальной плоскостях на малых ходах с использованием маршевых винтов. 2 ил.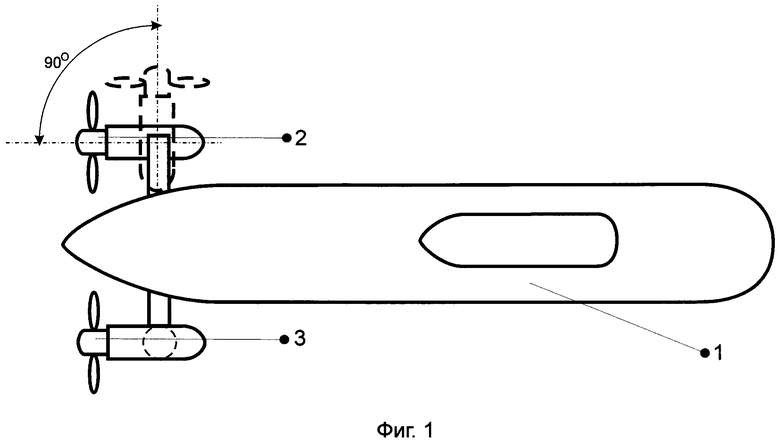
Подводный аппарат, включающий корпус с устройствами и движительно-рулевой комплекс, состоящий из двух кормовых маршевых винтов, размещенных с возможностью разворота, отличающийся тем, что один из кормовых маршевых винтов размещен на кронштейне и снабжен приводом разворота на 90° в горизонтальной плоскости, а другой кормовой маршевый винт размещен на кронштейне и снабжен приводом разворота на 90° в вертикальной плоскости.
| ПОДВОДНЫЙ АППАРАТ | 2000 |
|
RU2172699C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2104210C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| US 4030434 A1, 21.06.1977. | |||

