Изобретение относится к радиолокации и может быть использовано для распознавания кораблей путем обработки РЛ изображений (РЛИ), получаемых БРЛС с синтезированием апертуры (СА) антенны, на основе выделения и анализа РЛ тени (РЛТ), образованной кораблем на взволнованной морской поверхности.
В настоящее время известны способы распознавания протяженных объектов различных типов (кораблей, наземных объектов искусственного и естественного происхождения), основанные на обработке РЛИ, получаемых в режиме прямого СА [1, 2, 3] и в режиме инверсного СА [4]. В этих способах изображение объекта формируется за счет РЛ сигналов, отраженных непосредственно от его элементов, а для его распознавания используются различные способы обработки изображений, основанные на пространственной фильтрации с применением эталонных описаний объектов.
В способах, использующих режим прямого СА, изображение объектов получают в координатах дальность-азимут, то есть формируется «вид сверху» объекта. В режиме инверсного СА, работа которого основана на использовании качки корабля, при передне-боковом его облучении изображение получают как «вид сбоку», то есть боковой силуэт. Силуэт корабля содержит в себе больше информационных признаков, необходимых для распознавания класса корабля, чем его представление в плане, формируемое в режиме прямого СА. Но в режиме инверсного СА существуют ограничения (угловое положение корабля относительно БРЛС, погодные условия), влияющие на его функциональные возможности по распознаванию. В режимах с СА для формирования РЛИ используется электромагнитная энергия, отраженная непосредственно от объекта в направлении на РЛС, поэтому уменьшается вероятность обнаружения и распознавания протяженных объектов, в конструкции которых применяются технологии снижения эффективной отражающей поверхности рассеяния («стеле»).
Технический результат, который может быть получен при использовании настоящего способа, заключается в повышении вероятности распознавания надводных объектов (кораблей), а также в возможности производить распознавание кораблей, выполненных по технологии «стеле».
Указанный результат достигается тем, что в качестве основного информационного признака, применяемого для распознавания объекта, используется форма РЛТ, образуемой объектом на взволнованной морской поверхности при его облучении БРЛС с СА, установленной на борту летательного или космического аппарата. Форма РЛТ определяется габаритами и силуэтом корабля, а также его угловым положением относительно БРЛС. Форма РЛТ содержит в себе внешние конструктивные признаки корабля, что повышает вероятность его правильного распознавания.
Распознавание надводных кораблей осуществляется следующим образом. После получения целеуказания на какой-либо морской объект, который необходимо распознать, БРЛС в режиме СА формирует РЛИ участка морской поверхности с указанным объектом. При этом необходимые параметры РЛИ рассчитываются на основании данных о положении объекта относительно БРЛС - наклонной дальности (R) и азимута, а также характеристик кораблей, хранящихся в базе данных (в списке распознаваемых кораблей).
Информация о положении объекта относительно БРЛС может быть предварительно получена с помощью самой БРЛС, работающей в каком-либо РЛ режиме обзора морской поверхности, или передана по линии связи от других источников информации, расположенных на других носителях.
Получаемое РЛИ имеет вид матрицы S(m,n) размером М×N, содержащей распределение уровней РЛ сигналов по n-ым каналам дальности БРЛС (n=0, 1, 2, …, N-1) и m-ым азимутальным каналам (m=0, 1, 2, …, М-1). Линейное разрешение в РЛИ по дальности - dr и по азимуту - da может быть различным и иметь величину приблизительно в несколько метров.
Значение N выбираются так, чтобы длина участка морской поверхности, содержащегося в РЛИ, по дальности была не менее, чем в 4 раза больше длины Lm самой протяженной РЛТ, которая рассчитывается по формуле:
Lm= HmR/(H0-Нm),
где Нm - самая большая высота для кораблей из списка распознаваемых;
Н0 - высота носителя БРЛС над морской поверхностью;
R - дальность до корабля.
N≥4Lm/dr.
Значение М выбираются так, чтобы протяженность участка морской поверхности, содержащегося в РЛИ, по азимуту была не менее чем в 3 раза больше значения Xm, которое равно длине самого протяженного корабля из списка распознаваемых:
М≥3Xm/da.
Каждому списку распознаваемых кораблей соответствуют свои собственные значения Нm и Хm, которые хранятся в базе данных. В список может входить любое количество кораблей, а также других морских объектов.
Дальность R0 до начала рассматриваемого участка морской поверхности выбирают так, чтобы сам объект находился в центре РЛИ.
На фиг. 1 для примера показано яркостное РЛИ, которое содержит отметки сигналов, отраженных от корабля, а также его РЛТ (РЛИ получено с помощью математического моделирования). На представленном изображении уровень черного соответствует минимальному сигналу, а уровень белого - максимальному сигналу, содержащемуся в РЛИ.
Первый этап обработки РЛИ заключается в исключении из него РЛ отметок, соответствующих сигналам, отраженным непосредственно от корабля. Для этого сначала в полученном РЛИ определяют средний уровень (S0) и максимальный уровень (Sm) РЛ сигналов, отраженных непосредственно от морской поверхности. Для этого используется ближний участок РЛИ, заведомо не содержащий РЛТ, а также РЛ сигналов, отраженных от корабля (см. фиг. 1):
 ,
,
где Ns=N/2-Xm/dr.
Затем для удаления из РЛИ собственного изображения корабля производится замена всех элементов S(m,n), превышающих величину Sm, на значения, равные S0. В результате получается новое РЛИ - матрица St(m,n), вид которой показан на фиг. 2
Далее проводится корреляционная обработка полученной матрицы St(m,n) с использованием предварительно сформированных и хранящихся в базе данных эталонных матриц Tqab(k,p), заключающих в себе формы РЛТ, образованных распознаваемыми кораблями для различных значений углов, под которыми они наблюдаются из точки расположения БРЛС.
Индекс q эталонных матриц (ЭМ) означает номер распознаваемого корабля (класс корабля) в списке распознаваемых, а - курсовой угол корабля, заданный в числе угловых дискретов, величина которых Δa задается с точностью нескольких градусов, а b - угол наблюдения корабля в вертикальной плоскости, измеряемый в числе угловых дискретов, величина которых Δb задается в долях градуса.
Номера k соответствуют каналам дальности (k=0, 1, 2, …, K-1), а p - азимутальным каналам БРЛС (p=0, 1, 2, …, Р-1). Значения дискретов по дальности и азимуту для всех ЭМ задаются такими же, как в матрице S(m,n), а величины K и Р определяются по формулам:
 ,
,  .
.
ЭМ подготавливаются заранее и хранятся в базе данных. При формировании ЭМ ее элементы, расположенные внутри РЛТ заполняются единицами, а элементы вне РЛТ заполняются нулями.
На фиг. 3 представлена ЭМ, соответствующая РЛ сцене, для которой было получено РЛИ, показанное на фиг. 1. Формировать ЭМ можно с помощью математического моделирования с использованием 3-D моделей кораблей, также можно применять какие-либо другие способы.
Корреляционные матрицы (КМ) рассчитываются по формуле:
 ,
,
где i=0, 1, 2, …M-K-1; j=0, 1, 2, …N-P-1;
 - средний уровень шумов приемного тракта РЛС.
- средний уровень шумов приемного тракта РЛС.
Общее количество КМ, получаемых для одного РЛИ равно произведению qa. Для вычислений КМ из базы данных выбираются ЭМ с индексом b, который определяется на основании известных значений дальности до объекта и собственной высоты носителя БРЛС по формуле:
b=arcsin(H0/R)/Δb.
Величина среднего уровня шумов приемного тракта БРЛС, если она известна и постоянна, хранится в базе данных. Если эта величина меняется во времени, то она измеряется каким-либо способом перед началом формирования РЛИ.
На фиг. 4 показана КМ, полученная в результате обработки РЛИ, представленного на фиг. 1, с использованием ЭМ, показанной на фиг. 3, в виде яркостного изображения. На фиг. 5 показана центральная часть данной КМ в форме трехмерного графика. Для лучшего восприятия график представлен в перевернутом виде.
Полученный набор КМ подвергается дальнейшей обработке с целью выбора из списка распознаваемых кораблей, такого у которого РЛТ наиболее близка по своей форме РЛТ, содержащейся в полученном РЛИ. Для этого используется алгоритм, состоящий из следующих операций.
Сначала в полученных КМ рассчитывают значения среднего уровня сигнала Aqb:
 .
.
Для каждой КМ определяется сигнал, имеющий минимальное значение Bqa, а затем рассчитывается пороговый уровень сигнала Cqa:
Затем для каждой КМ подсчитывается количество ее элементов Dqa, которые имеют уровни сигналов менее порогового значения Cqa, и рассчитывается коэффициент Hqa:
Из всех полученных коэффициентов Hqa выбирается коэффициент, имеющий наибольшее значение, и делается вывод о том, что распознан объект с индексом q, соответствующим выбранному коэффициенту Hqa, который имеет курсовой угол, соответствующий выбранному коэффициенту и равный произведению а Δа.
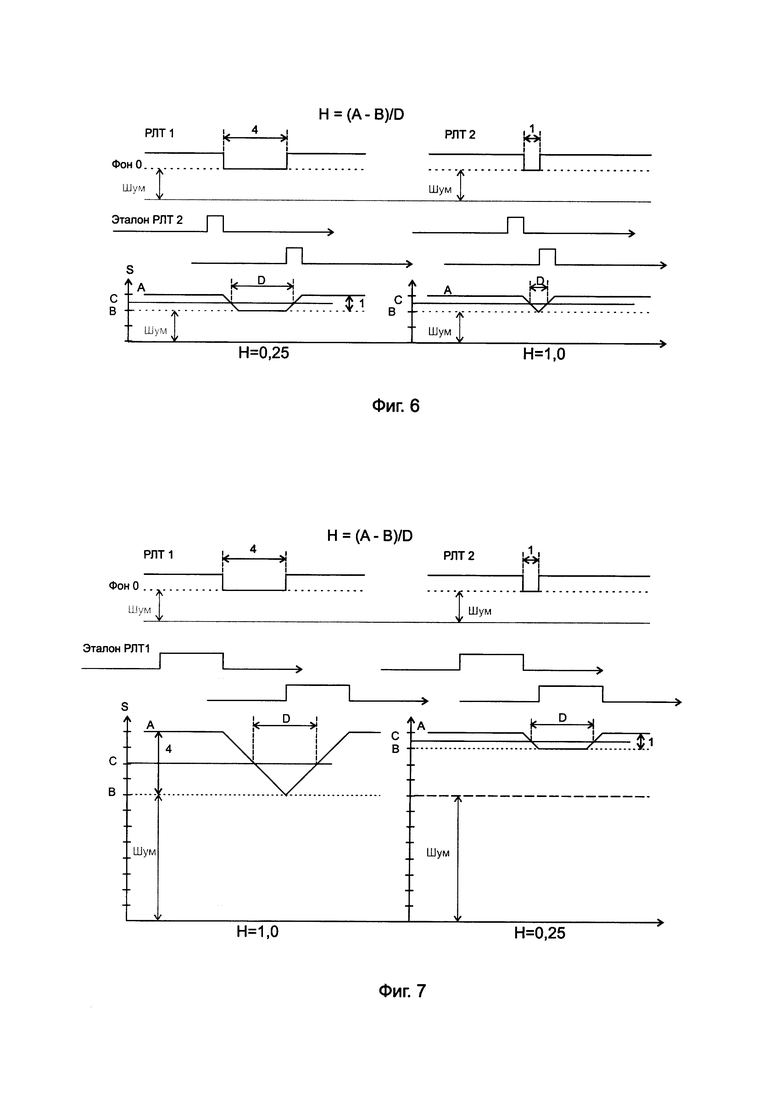
Принцип работы описанного алгоритма распознавания поясняется с помощью графиков, приведенных на фиг. 6 и фиг. 7, для упрощенного случая - двумерного представления изображений РЛТ. На фиг. 6 показаны результаты обработки двух изображений РЛТ (РЛТ 1 и РЛТ 2), которые различаются по протяженности в четыре раза, с использованием эталона, соответствующего РЛТ 2. Внизу на фиг. 6 изображены графики, полученные в результате корреляционной обработки РЛТ и эталона, а также соответствующие коэффициенты Н.
На фиг. 7 представлены результаты обработки данных изображений РЛТ с использованием эталона, соответствующего РЛТ 1. В обоих случаях при правильном выборе эталона коэффициент Н имеет значение, в четыре раза большее, чем при неверном выборе эталона.
Источники информации
1. Цивлин И.П. Автоматическое распознавание радиолокационных изображений в бортовой РЛС // Радиотехника. 2002. №9. Выпуск 65. «Радиоэлектронные комплексы», №2. С. 43-50.
2. Патент РФ 2423722. Способ распознавания надводных кораблей на взволнованной морской поверхности / Верба B.C., Неронский Л.Б., Осипов И.Г. и др.; Заявл. 07.04.2010. Опубл. 10.07.2011. Бюл. №19.
3. Ксендзук А.В., Евсеев И.А. Особенности обнаружения объектов в бистатических и многопозиционных РСА // Авиационно-космическая техника и технология. 2005. №2 (18). С. 62-68.
4. Menon М, Bourdreau Е., Kolodzy P. An Automatic Ship Classification System for ISAR Imagery // The Lincoln Laboratory Jornal, Vol. 6, Num. 2, 1993, p. 289-308.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ | 2005 |
|
RU2290663C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ БОРТОВОЙ СТАНЦИИ | 2011 |
|
RU2464680C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347237C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ ЛОКАЛЬНЫХ ОТРАЖАТЕЛЕЙ В КОСМИЧЕСКОМ РСА | 2017 |
|
RU2668570C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |

Изобретение относится к радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) с синтезированием апертуры антенны для распознавания надводных объектов (кораблей). Достигаемый технический результат - распознавание кораблей на морской поверхности вне зависимости от характеристик непосредственных радиолокационных (РЛ) отражений от элементов его конструкции, при этом характерной чертой способа является повышение вероятности правильного распознавания при увеличении волнения морской поверхности. Указанный результат достигается за счет того, что РЛ изображение участка морской поверхности с обнаруженной РЛ отметкой, свидетельствующей о наличие какого-либо объекта на морской поверхности, подвергается обработке с использованием эталонных матриц, содержащих изображения РЛ теней, образуемых кораблями и получаемых на основе информации о форме и положении корабля относительно БРЛС, а по результатам этой обработки выносится решение об идентичности обнаруженного объекта одному из входящих в заданный список кораблей, подлежащих распознаванию. 7 ил.
Способ радиолокационного распознавания кораблей, включающий получение с помощью бортовой радиолокационной станции (БРЛС) с синтезированием апертуры антенны радиолокационного изображения (РЛИ) участка морской поверхности с объектом, подлежащим распознаванию путем определения его принадлежности одному из кораблей, входящих в состав заданного списка распознаваемых кораблей, с использованием известной информации о местоположении распознаваемого объекта - азимуте и наклонной дальности R относительно носителя БРЛС, причем в РЛИ, представляющем собой матрицу уровней радиолокационных (РЛ) сигналов S(m,n), строки соответствуют n-ым каналам дальности БРЛС, имеющим линейное разрешение dr, общее число которых равно N (n=0, 1, 2, … , N-1), столбцы соответствуют m-ым азимутальным каналам БРЛС, имеющим линейное разрешение da, общее число которых равно М (m=0, 1, 2, …, М-1), а длина участка морской поверхности по дальности должна быть не менее, чем в 4 раза больше длины Lm самой протяженной радиолокационной тени (РЛТ), которая может быть образована кораблем из списка распознаваемых и рассчитывается по формуле Lm=HmR/(H0-Hm), где Hm - самая большая высота для кораблей из списка распознаваемых; Н0 - высота носителя БРЛС над морской поверхностью, при этом N≥4Lm/dr, протяженность участка морской поверхности, содержащегося в РЛИ, по азимуту должна быть не менее чем в 3 раза больше значения Xm, которое равно длине самого протяженного корабля из списка распознаваемых, при этом М≥3Xm/da, причем каждому списку распознаваемых объектов соответствуют свои собственные значения Hm и Xm, которые хранятся в базе данных, а дальность R0 до начала рассматриваемого участка морской поверхности выбирают так, чтобы сам объект находился в центре РЛИ, полученное РЛИ подвергают последовательности операций, включающей в себя исключение из РЛИ сигналов, отраженных непосредственно от корабля, для чего в РЛИ определяют максимальный уровень Sm и средний уровень S0 РЛ сигналов, отраженных от морской поверхности, используя для этого участок РЛИ, заведомо не содержащий РЛТ и РЛ сигналы, отраженные от корабля, по формуле  , где Ns=N/2-Xm/dr, и элементы матрицы S(m,n), превышающие величину Sm, заменяют на значения, равные S0, для получения матрицы St(m,n), обработку полученной матрицы St(m,n) с использованием предварительно сформированных и хранящихся в базе данных эталонных матриц Tqab(k,p), хранящих в себе формы РЛТ, образованных распознаваемыми кораблями для различных значений углов, под которыми они наблюдаются из точки расположения БРЛС, с получением корреляционных матриц
, где Ns=N/2-Xm/dr, и элементы матрицы S(m,n), превышающие величину Sm, заменяют на значения, равные S0, для получения матрицы St(m,n), обработку полученной матрицы St(m,n) с использованием предварительно сформированных и хранящихся в базе данных эталонных матриц Tqab(k,p), хранящих в себе формы РЛТ, образованных распознаваемыми кораблями для различных значений углов, под которыми они наблюдаются из точки расположения БРЛС, с получением корреляционных матриц  , где
, где  - средний уровень шумов приемного тракта БРЛС, индекс q означает номер распознаваемого корабля в списке распознаваемых, а - курсовой угол корабля, заданный в числе угловых дискретов, величина которых Δа задается с точностью нескольких градусов, b - угол наблюдения корабля в вертикальной плоскости, измеряемый в числе угловых дискретов, величина которых Δb задается с точностью долей градуса, номера k и p в эталонных матрицах (ЭМ) соответствуют каналам дальности и азимута, причем величины дискретов по дальности и азимуту в ЭМ такие же, как в РЛИ, K=Lm/dr, P=Xm/da, k=0, 1, 2, …, K-1, р=0, 1, 2, …, Р-1, i=0, 1, 2, …, M-K-1, j=0, 1, 2, …, N-Р-1, при этом элементы ЭМ, расположенные внутри РЛТ имеют значения, равные единице, а элементы вне РЛТ равны нулю, индекс b, используемых ЭМ определяют на основании известных значений дальности до объекта и собственной высоты носителя БРЛС по формуле b=arcsin(H0/R)/Δb, в полученных корреляционных матрицах рассчитывают значения среднего уровня сигналов
- средний уровень шумов приемного тракта БРЛС, индекс q означает номер распознаваемого корабля в списке распознаваемых, а - курсовой угол корабля, заданный в числе угловых дискретов, величина которых Δа задается с точностью нескольких градусов, b - угол наблюдения корабля в вертикальной плоскости, измеряемый в числе угловых дискретов, величина которых Δb задается с точностью долей градуса, номера k и p в эталонных матрицах (ЭМ) соответствуют каналам дальности и азимута, причем величины дискретов по дальности и азимуту в ЭМ такие же, как в РЛИ, K=Lm/dr, P=Xm/da, k=0, 1, 2, …, K-1, р=0, 1, 2, …, Р-1, i=0, 1, 2, …, M-K-1, j=0, 1, 2, …, N-Р-1, при этом элементы ЭМ, расположенные внутри РЛТ имеют значения, равные единице, а элементы вне РЛТ равны нулю, индекс b, используемых ЭМ определяют на основании известных значений дальности до объекта и собственной высоты носителя БРЛС по формуле b=arcsin(H0/R)/Δb, в полученных корреляционных матрицах рассчитывают значения среднего уровня сигналов  , находят минимальные значения сигналов Bqa, рассчитывают пороговые уровни сигналов
, находят минимальные значения сигналов Bqa, рассчитывают пороговые уровни сигналов  , подсчитывают количество элементов Dqa, которые имеют уровни сигналов менее порогового значения Cqa, рассчитывают коэффициенты
, подсчитывают количество элементов Dqa, которые имеют уровни сигналов менее порогового значения Cqa, рассчитывают коэффициенты  , из всех полученных коэффициентов Hqa выбирают коэффициент, имеющий наибольшее значение, и делают вывод о том, что распознан объект с индексом q, соответствующим выбранному коэффициенту Hqa, который имеет курсовой угол, соответствующий выбранному коэффициенту Hqa и равный произведению a Δa.
, из всех полученных коэффициентов Hqa выбирают коэффициент, имеющий наибольшее значение, и делают вывод о том, что распознан объект с индексом q, соответствующим выбранному коэффициенту Hqa, который имеет курсовой угол, соответствующий выбранному коэффициенту Hqa и равный произведению a Δa.
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА МОНИТОРИНГА ОБСТАНОВКИ, ПРЕДУПРЕЖДЕНИЯ И ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2014 |
|
RU2558658C1 |
| МНОГОПОЗИЦИОННЫЙ КОМПЛЕКС С АВТОНОМНЫМИ РАДИОЛОКАЦИОННЫМИ ТЕРМИНАЛАМИ И ГИДРОАКУСТИЧЕСКИМИ ЗОНДАМИ ДЛЯ МОНИТОРИНГА НАДВОДНОГО, ПОДВОДНОГО И ВОЗДУШНОГО ПРОСТРАНСТВА АКВАТОРИЙ | 2013 |
|
RU2558666C2 |
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2001 |
|
RU2191403C1 |
| JP 2009025042 A, 05.02.2009 | |||
| KR 2016044801 A, 26.04.2016 | |||
| ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫНАТЯЖЕНИЯ | 0 |
|
SU354302A1 |

