Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, в которых применяются лучевые импульсные системы теленаведения с одноступенчатой (одинарной) модуляцией.
Известен способ наведения ракет в командной радиолинии и система наведения ракет, его реализующая [В.П.Демидов, Н.Ш.Кутыев "Управление зенитными ракетами", М.: Военное издательство, 1989, стр.257-260, рис.9.1], которые позволяют наводить с одного пункта управления на одну или несколько целей одновременно несколько ракет за счет передачи большого числа команд.
В системах теленаведения по лучу возможно одновременно наводить на одну цель несколько ракет с помощью одного канала теленаведения [Основы радиоуправления./ Под ред. Вейцеля В.А. и Типугина В.Н., М.: Сов. радио, 1973 г, стр.36]. Однако в лучевых системах теленаведения невозможно по одной линии связи формировать команды для управления одновременно несколькими ракетами для наведения их на разные цели без перенацеливания, т.е. после поражения первой цели первой ракетой, перенацеливание второй ракеты на вторую, рядом расположенную и т.д.
Известен способ наведения телеориентируемой в луче ракеты и ракетный комплекс, его реализующий [Основы радиоуправления./ Под ред. Вейцеля В.А. и Типугина В.Н., М.: Сов. радио, 1973 г, стр.272-277, рис.5.3, стр.30, 31], выбранные в качестве прототипа. Известный способ наведения телеориентируемой в луче ракеты заключается в том, что формируют пространственную структуру электромагнитного поля в виде амплитудно-импульсной модуляции поднесущего сигнала с амплитудной модуляцией несущего (АИМ-АМ), т.е. при этом формируют поле управления сканированием диаграммы направленности электромагнитного излучения относительно начала координат, совпадающего с центром поля управления, изменяют параметры электромагнитного поля, а на ракете преобразуют принимаемое электромагнитное излучение в электрический сигнал и декодируют его.
Ракетный комплекс (комплекс управляемого снаряда) содержит пусковое устройство, пункт управления и управляемую ракету, связанные между собой электрическими (в том числе разрывными) цепями, при этом для лучевой системы теленаведения пусковое устройство можно рассматривать как пусковую (стартовую) установку, причем в пункт управления входят передатчик (радиопередающее устройство) и аппаратура кодирования (счетно-решающий прибор и устройство управления антенной радиолуча), а на ракете в бортовую аппаратуру управления ракетой входят канал ошибки, опорный канал, блок поправки на угол крена и преобразователь координат, которые в целом выполняют функцию выделения координат по курсу «Z» и тангажу «Y» и являются по сути блоком выделения координат.
Таким образом, известный ракетный комплекс содержит на ракете элементы электромеханической стыковки, приемник и блок выделения координат, а на пункте управления - аппаратуру кодирования по курсу и тангажу и передатчик, при этом элементы электромеханической стыковки ракеты связаны с пунктом управления через устройство электромеханической стыковки пусковой установки.
Как следует из изложенного выше, в прототипе при использовании на соседних пунктах управлений разных значений величин частот AM колебаний возможно на одну или несколько целей производить пуски одновременно нескольких ракет с разных пунктов управления, при этом возможные пересечения лучей (пространственных структур электромагнитных полей) с разных пунктов управления не приведут к переходу ракеты из своего в соседнее поле.
В настоящее время из-за стремления уменьшения габаритно-массовых и стоимостных характеристик лучевых систем теленаведения находят широкое применение полупроводниковые лазерные импульсные излучатели, с помощью которых формируют пространственную структуру электромагнитного поля, при этом используют одноступенчатую модуляцию. В этих системах не применяют AM и, следовательно, для идентификации поля управления, формируемого пунктом управления, требуется вводить в структуру сигнала дополнительный признак принадлежности поля управления данному пункту управления.
Следовательно, недостатком прототипа (способа и устройства) является двухступенчатая модуляция пространственной структуры поля управления, которая усложняет их реализацию и приводит к увеличению габаритно-массовых и стоимостных характеристик комплекса управления ракетами.
Задачей настоящего изобретения (способа и устройства) является упрощение их реализации, т.е. уменьшение габаритно-массовых и стоимостных характеристик за счет одноступенчатой модуляции электромагнитного поля управления при сохранении перекрестной стрельбы с соседних пунктов управления, которая исключает перехват "своей" ракеты "чужим" пунктом управления.
Поставленная задача решается в способе наведения телеориентируемой в луче ракеты за счет того, что формируют поле управления сканированием диаграммы направленности электромагнитного излучения относительно начала координат, совпадающего с центром поля управления, при этом изменяют параметры электромагнитного излучения, преобразуют принимаемое электромагнитное излучение на ракете в электрический сигнал и декодируют его, дополнительно изменяют параметры электромагнитного излучения одноступенчатой модуляцией, причем в параметры электромагнитного излучения вводят адрес пункта управления, который соответствует ракете, управляемой с этого пункта управления, при этом выставляют адрес на пункте управления и на ракете до момента старта.
Ракетный комплекс, основанный на этом способе, содержащий на ракете приемник, блок выделения координат и элементы электромеханической стыковки, а на пункте управления - аппаратуру кодирования по курсу и тангажу и передатчик, при этом элементы электромеханической стыковки ракеты связаны с пунктом управления через устройство электромеханической стыковки пусковой установки, дополнительно введены на пункте управления блок задания адреса, а на ракете - последовательно включенные блок установки адреса и дешифратор адреса, при этом выходы аппаратуры кодирования по курсу и тангажу соединены соответственно с первым и вторым входами блока задания адреса, первый и второй выходы блока задания адреса подключены, соответственно, ко входам по курсу и тангажу передатчика, выход приемника соединен со вторым входом дешифратора адреса, выходы которого по курсу и тангажу подключены соответственно к первому и второму входам блока выделения координат, при этом вход блока установки адреса связан с элементами электромеханической стыковки ракеты.
Заявленный способ наведения ракеты реализуется следующим образом. На пункте управления передающим устройством формируют поле управления путем сканирования диаграммы направленности электромагнитного излучения относительно начала координат, совпадающего с центром поля управления и, например, являющегося точкой прицеливания.
Сканирование диаграммы направленности можно производить в двух взаимно перпендикулярных направлениях (по курсу «Z» и тангажу «Y») в системе декартовых координат «Z0Y», где «0» - начало координат, «Z» и «Y» - значения величин координат.
Изменяя параметры электромагнитного поля, формируют поле, которое несет информацию о величине координат «Z» и «Y» в плоскости, перпендикулярной направлению полета ракеты. На ракете преобразуют принимаемое электромагнитное излучение в электрический сигнал и декодируют его, определяя тем самым положение ракеты относительно «0» координат.
Параметры электромагнитного поля изменяют с помощью одноступенчатой модуляции, например время-импульсной модуляции (ВИМ). Присваивают каждой точке в структуре электромагнитного поля адрес пункта управления, например, соответствующим временным интервалом между двумя соседними импульсами. Этот адрес соответствует ракете, управляемой с этого пункта управления, а сам адрес выставляют на пункте управления и на ракете до момента старта.
Предлагаемое изобретение поясняется чертежами (фиг.1, 2, 3 и 4). На фиг.1 изображена структурная схема ракетного комплекса, где 1 - пункт управления (ПУ), 2 - блок задания адреса (БЗА), 3а и 3б - аппаратура кодирования соответственно по курсу «Z» (АКК) и тангажу «Y» (АКТ), 4а и 4б - первая (3Д1) и вторая (3Д2) схемы задержки, 5 - коммутатор (К), 6а и 6б - первая (ЛС1) и вторая (ЛС2) логические схемы ИЛИ, 7 - передатчик (П), 8а и 8б - источники излучения соответственно по курсу «Z» (ИИК) и тангажу «Y» (ИИТ), 9 - оптическая система (ОС), 10 - ракета (Р), 11 - приемник (ПР), 12 - дешифратор адреса (ДА), 13 - блок установки адреса (БУА), 14 - элементы электромеханической стыковки ракеты (ЭСР), 15 - устройство электромеханической стыковки пусковой установки (УСП), 16 - блок выделения координат (БВК).
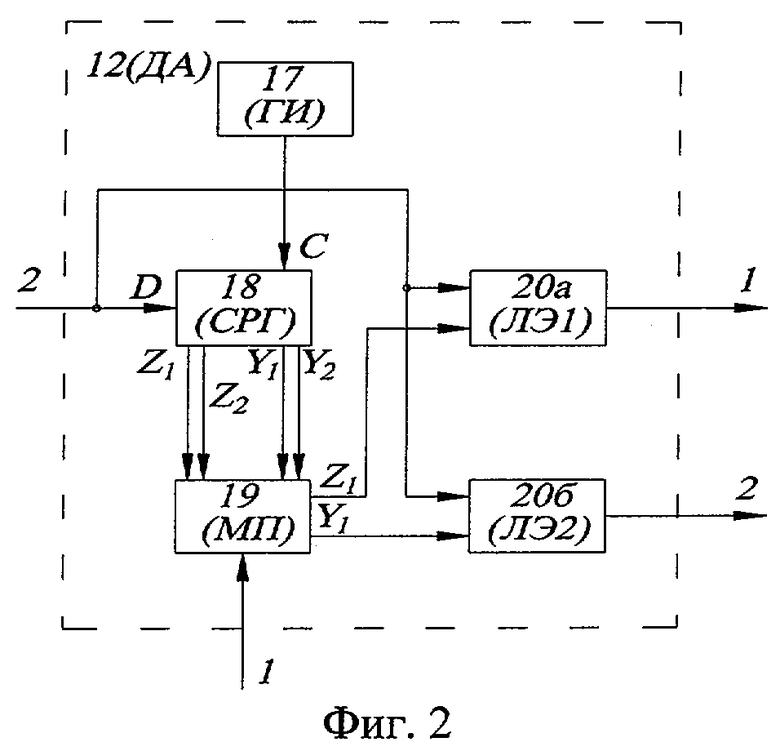
На фиг.2 представлена электрическая структурная схема блока 12 (пример выполнения), где представлены 17 - генератор импульсов (ГИ), 18 - сдвиговый регистр(СРГ), 19 - мультиплексор (МП), 20а и 20б - первый (ЛЭ1) и второй (ЛЭ2) логические элементы (схемы) И соответственно.
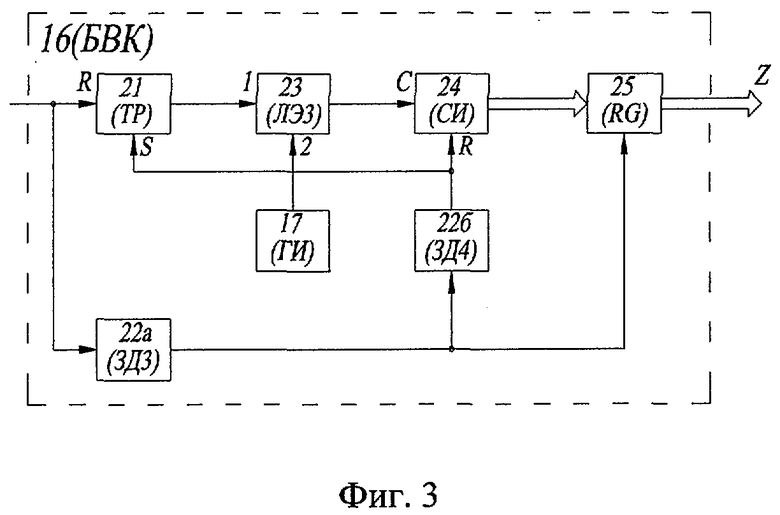
На фиг.3 представлена электрическая структурная схема блока 16 (пример выполнения), где представлены 21 - "RS"-триггер (ТР), 22а и 22б - соответственно третья (ЗДЗ) и четвертая (ЗД4) схемы задержки, 23 - третий логический элемент (схема) И (ЛЭЗ), 24 - счетчик импульсов (СИ), 25 - регистр(РГ).
На фиг.4 представлены эпюры сигналов, где а - сигнал на выходе аппаратуры кодирования 3а, б - сигнал на выходе блока задания адреса 2 (выход схемы 6а), в - сигнал на первом выходе дешифратора адреса 12, г - сигнал на выходе третьей схемы задержки 22а, д - сигнал на выходе четвертой схемы задержки 22б, е - сигнал на выходе "RS"-триггера 21, ж - сигнал на выходе счетчика импульсов 24 (в аналоговом виде, например на выходе цифроаналогового преобразователя, подключенного к выходам счетчика), з - сигнал на выходе регистра 25 (в аналоговом виде, например на выходе цифроаналогового преобразователя, подключенного к выходам регистра).
Заявленный ракетный комплекс содержит ракету 10, при этом элементы электромеханической стыковки ракеты 14 связаны с пунктом управления 1 через устройство электромеханической стыковки пусковой установки 15. На пункте управления 1 выходы аппаратуры кодирования по курсу «Z» За и тангажу «Y» 3б соединены соответственно с первым и вторым входами блока задания адреса 2. Первый и второй выходы блока задания адреса 2 подключены соответственно ко входам по курсу и тангажу передатчика 7. На каждой ракете 10 последовательно включены блок установки адреса 13 и дешифратор адреса 12. Выход приемника 11 соединен со вторым входом дешифратора адреса 12, выходы которого по курсу «Z» и тангажу «Y» подключены соответственно к первому и второму входам блока выделения координат 16. Вход блока установки адреса 13 связан с элементами электромеханической стыковки ракеты 14.
Аппаратуру кодирования по курсу и тангажу 3а и 3б можно выполнить для ВИМ, например, как два преобразователя "напряжение - временной интервал", на входы которых подают командные сообщения [Основы радиоуправления/ Под ред. Вейцеля В.А. и Типугина В.Н., М.: Сов. радио, 1973 г, стр.239, рис.4.22] с соответствующих датчиков угла сканирования по курсу и тангажу, например потенциометров, движок которых механически связан с оптической системой 9, при этом в преобразователе "напряжение - временной интервал" генератор пилообразного напряжения может быть выполнен в виде счетчика импульсов, на счетный вход которого подают сигнал от генератора импульсов (например, 17), а на вход обнуления счетчика поступает сигнал с выхода формирующего устройства, например ждущего мультивибратора, вырабатывающего нормированные по длительности импульсы из сигнала с выхода компаратора.
Схемы задержки 4а и 4б можно выполнить, например, в виде соответственно двух сдвиговых регистров на микросхемах 564ИР2, при этом информационные входы "D" подключают к выходу аппаратуры кодирования соответственно 3а и 3б, а тактовые входы "С" - к выходу кварцованного генератора импульсов. Коммутатор 5 можно выполнить на микросхеме 564КП1, которая позволяет по входам управления "А0" и "А1" выставлять в двоичном коде четыре значения адреса, т.е. Z1, Z2, Z3 и Z4, a также Y1, Y2, Y3 и Y4 (на фиг.1 изображены всего два значения адреса Z1, Y1, и Z2, Y2). Для выставления адреса требуется на входы управления подать, например, с помощью тумблеров определенное двоичное число. Первая 6а и вторая 6б логические схемы ИЛИ - обычные двухвходовые логические схемы, например микросхемы 564-й серии.
Источники излучения 8а и 8б, например, соответственно два лазера полупроводниковых инжекционных импульсного режима ИЛПИ-107. Оптическая система 9, например, качающаяся или вращающаяся призма, осуществляющая сканирование импульсного оптического излучения по курсу приводом, который механически связан с угловым датчиком, электрический сигнал с выхода которого поступает на вход аппаратуры кодирования по курсу «Z». Аналогичным образом и в канале тангажа «Y». Два сканируемых оптических излучения поочередно поступают на объектив, формирующий в пространстве поле управления. С объективом связан оптический прицел таким образом, чтобы марка прицела совпадала с центром поля управления.
Приемник 11 представляет собой, например, объектив с оптическим фильтром, с выхода которого излучение попадает на фоточувствительную площадку фотодиода, например, ФД-141К, а с выхода фотодиода - на усилитель, например, с автоматической регулировкой усиления. Блок установки адреса 13, например, для двух его значений, можно выполнить в виде цепочки, состоящей из электронного ключа, выполненного на транзисторе по схеме с общим эмиттером. Коллектор транзистора подключен к информационному входу ("D"), например D-триггера, тактовый вход "С" которого соединен, например, с выходом дифференцирующей RC-цепочки, подключенной входом к бортовому источнику питания. Вход транзисторного ключа соединен с элементами электромеханической стыковки ракеты 14, которые представляют, например, разрывной разъем. В случае установки, например, четырех адресов требуются не одна, а две цепочки, каждая из которых состоит из электронного ключа и D-триггера.
Устройство электромеханической стыковки пусковой установки 15 представляет собой, например, ответную часть разрывного разъема.
Генератор импульсов 17 (общий для блоков 12 и 16) представляет собой генератор, частота импульсов которого стабилизирована кварцевым резонатором. Сдвиговый регистр 18 может быть выполнен на микросхеме 564ИР2, мультиплексор 19 - на микросхеме 564КП2. Первый и второй логические элементы (схемы) И 20а и 20б - двухвходовые логические схемы И, например микросхемы серии 564.
"RS"-триггер 21, например микросхема 564ТМ2. Третья и четвертая схемы задержки 22а и 22б, например два ждущих мультивибратора, включенных последовательно; с выхода первого с помощью дифференцирующей RC-цепочки формируют первый задержанный импульс (выход схемы 22а), с выхода второго - второй (выход схемы 22б). Третий логический элемент (схема) И 23 идентичен схемам 20а и 20б. Счетчик импульсов 24 и регистр 25 - обычные микросхемы, например серии 564.
Заявленный ракетный комплекс работает следующим образом. В исходном положении ракета расположена на ферме пусковой установки и электрически связана с помощью элементов электромеханической стыковки ракеты 14 и устройства электромеханической стыковки пусковой установки 15 с пунктом управления 1. При включении источника питания на пункте управления 1 выставляют, например, с помощью тумблера или переключателя соответствующие логические уровни на управляющем входе (для двух адресов) мультиплексора в коммутаторе 5. Сигнал с выхода тумблера (выход 3 коммутатора поступает через устройство электромеханической стыковки пусковой установки 15 и элементы электромеханической стыковки ракеты 14 на вход блока установки адреса 13).
При пуске ракеты оператор нажимает кнопку "Пуск" (на фиг.1 она не приведена), при этом происходит подача напряжения от источника питания пункта управления 1 через устройство электромеханической стыковки пусковой управления 15 и элементы электромеханической стыковки ракеты 14 на ракету 10. На ракете запускается бортовой источник питания, при выходе на рабочий режим которого формируется одиночный импульс в блоке установки адреса 13, который осуществляет запись величины логического уровня с выхода элементов электромеханической стыковки ракеты 14, несущей адрес пункта управления 1. Таким образом на выходе блока установки адреса 13 формируется на время полета ракеты сигнал, несущий адрес пункта управления.
Затем производится запуск двигательной установки, под действием которой ракета 10 сходит с пусковой установки, при этом соответственно разрывается электромеханическая стыковка ракеты с пусковой установкой.
При включении источника питания пункта управления 1 начинает работать оптико-механическая часть, связывающая оптическую систему 9 передатчика 7, управляющую сканированием излучения по курсу и тангажу источников излучения соответственно 8а и 8б с датчиками угла сканирования соответственно по курсу и тангажу в аппаратуре кодирования по курсу 3а и по тангажу 3б.
На выходе аппаратуры кодирования 3а формируется сигнал, приведенный на фиг.4 (эпюра а). Как следует из этой эпюры, величина периода повторения импульсов Ткс, несущих командный сигнал, прямо пропорциональна углу сканирования (например, механическому смещению движка потенциометра датчика). Таким образом, величина командного сигнала прямо пропорциональна величине Ткс.
Импульсный сигнал с выхода аппаратуры кодирования 3а поступает на вход схемы задержки 4а. Импульсы на первом и втором выходах схемы задержки 4а будут отличаться разной величиной запаздывания относительно входных импульсов.
Поскольку на управляющем входе мультиплексора в коммутаторе 5 задан логический уровень, то соответственно этому уровню на выход 1 коммутатора 5 поступает один из сигналов с выхода блока 4а. Импульсы не задержанные (с выхода блока 3а) и задержанные с первого выхода коммутатора 5 поступают на логическую схему ИЛИ 6а, на выходе которой формируется сигнал, приведенный на эпюре б фиг.4.
Как следует из эпюры б (фиг.4), импульсный сигнал содержит величину командного сообщения - Ткс и адрес пункта управления по каналу курса TZ=TZ1.
Аналогичным образом формируется импульсный сигнал по каналу тангажа на втором выходе блока задания адреса 2.
Сигналы по курсу и тангажу с выходов блока задания адреса 2 поступают соответственно на излучатель по курсу 8а и тангажу 8б. Излучение с излучателей поступает на оптическую систему 9, которая поочередно его сканирует в двух взаимно перпендикулярных направлениях (по курсу и тангажу), проецируя в пространство поле управления, центр которого совпадает с точкой прицеливания.
Ракета 10, находясь в поле управления, сформированном пунктом управления 1, с помощью приемника 11 преобразует оптическое (электромагнитное излучение) в электрический сигнал, т.е. в последовательность импульсов, соответствующую моменту времени облучения приемника 11 сканируемым излучением. Эта последовательность импульсов, например, соответствующая эпюре б на фиг.4, поступает на второй вход дешифратора адреса 12, т.е. на информационный вход (вход "D") сдвигового регистра 18, на тактовый вход (вход "С") которого поступают импульсы с генератора импульсов 17. Каждый импульс с генератора 17 сдвигает на один разряд вправо единичный логический уровень, соответствующий импульсу на входе "D" регистра 18. Таким образом, на выходах регистра 18 Z1, Y1, и Z2, Y2 поочередно с разным временем запаздывания будет появляться входной импульс. Поскольку сигнал, поступающий на первый вход блока 12 (вход управления мультиплексора 19) с выхода блока установки адреса 13, коммутирует его два выхода с соответствующими двумя входами, например с Z1, Y1, то соответственно на этих входах будут импульсы, задержанные во времени относительно входных (на входе "D" регистра 18) на величину TZ1 и TY1.
При TZ=TZ1 на выходе логической схемы И 20а выделяются импульсы, несущие командное сообщение Ткс (эпюра в на фиг.4). Аналогично и в канале тангажа для TY1. Таким образом, на выходах дешифратора адреса 12 будут выделяться вторые импульсы из пары, несущие командное сообщение по курсу TZ1 и тангажу TY1, т.е. принадлежащие своему пункту управления 1, и не будут выделяться импульсы TZ1 и ТY2, принадлежащие чужому пункту управления.
Импульсы с выхода дешифратора адреса 12 по каналу курса (эпюра в на фиг.4) поступают на вход "R" "RS"-триггера 21 и выставляют на его выходе нулевой логический уровень, который поступает на первый вход третьей логической схемы "И" 23 и запрещает прохождение импульсов с генератора импульсов 17 на счетный вход (вход "С") счетчика импульсов 24. Счетчик импульсов 24 из режима счета переходит в режим хранения двоичного числа, соответствующего количеству импульсов, поступивших на его счетный вход (эпюра ж на фиг.4).
Одновременно импульс с выхода дешифратора адреса 12 поступает на схему задержки 22а, на выходе которой формируется импульс (эпюра г на фиг.4), который записывает двоичное число с выхода счетчика импульсов 24 в регистр25 (эпюра з на фиг.4). Задержанный импульс с выхода схемы задержки 22а поступает на схему задержки 22б, где он дополнительно задерживается. Этот дополнительно задержанный импульс (эпюра д на фиг.4) обнуляет по входу "R" счетчик импульсов 24, выставляет по входу "S" единичный логический уровень на выходе "RS"-триггера 21 (эпюра е на фиг.4), который разрешает прохождение импульсов с выхода генератора импульсов 17 на счетный вход счетчика импульсов 24. Счетчик импульсов 24 вновь начинает счет импульсов до момента прихода следующего импульса на "R" вход "RS"-триггера 21, после чего процесс повторяется вновь.
Таким образом, командное сообщение, определяемое величиной ТКС, преобразуется в двоичное число, которое хранится в регистре 25 до момента прихода следующего командного сообщения, после чего оно обновляется. Аналогично и в канале тангажа.
Следовательно, на выходах блока выделения координат 16 сформируется двоичное число (или аналоговое напряжение при подключении цифроаналогового преобразователя), которое соответствует отклонению ракеты от точки прицеливания по курсу и тангажу, т.е. координатам ракеты по курсу «Z» и тангажу «Y» относительно «0» в декартовой системе координат, где «0» - точка прицеливания, совпадающая с центром поля управления.
После поражения цели на пусковую установку устанавливают вторую ракету, и весь процесс пуска и полета повторяется вновь.
Как следует из приведенного выше, количество проводников, связывающих пункт управления и ракету для выставления на ракете адреса своего пункта управления, определяется количеством адресов, например не считая "корпусного" проводника, для выставления одного из двух адресов требуется один проводник, одного из трех или четырех - два, одного из пяти, семи или восьми - три и т.д.
Кроме того, приведенная в описании устройства ВИМ модуляция в виде пар импульсов может быть выполнена и иначе, например, как в [Основы радиоуправления./ Под ред. Вейцеля В.А. и Типугина В.Н., М.: Сов. радио, 1973 г, стр.248, рис.4.29], т.е. содержать рабочие и тактовые сигналы и т.д.
Следовательно, в способе наведения телеориентируемой в луче ракеты за счет того, что изменяют параметры электромагнитного поля одноступенчатой модуляцией и присваивают каждой точке в структуре электромагнитного поля адрес пункта управления, который соответствует ракете, управляемой с этого пункта управления, при этом выставляют адрес на пункте управления и ракете до момента старта, упрощена реализация при сохранении перекрестной стрельбы с соседних пунктов управления, которая исключает перехват "своей" ракеты "чужим" пунктом управления.
Введение в ракетном комплекс на пункте управления блока задания адреса, а на ракете последовательно включенных блока установки адреса и дешифратора адреса, при котором входы аппаратуры кодирования по курсу и тангажу соединены соответственно с первым и вторым входами блока задания адреса, первый и второй выходы блока задания адреса подключены соответственно ко входам по курсу и тангажу передатчика, выход приемника соединен со вторым входом дешифратора адреса, выходы которого по курсу и тангажу подключены соответственно к первому и второму входам блока выделения координат, при этом вход блока установки адреса связан с элементами электромеханической стыковки ракеты, позволяет уменьшить габаритно-массовые и стоимостные характеристики при сохранении перекрестной стрельбы с соседних пунктов управления, которая исключает перехват "своей" ракеты "чужим" пунктом управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ ТЕЛЕНАВЕДЕНИЯ РАКЕТЫ ПО ЛУЧУ И СИСТЕМА ТЕЛЕНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258888C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАКЕТОЙ В ЛУЧЕ, СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ФОРМИРОВАНИЯ N РАЗОВЫХ КОМАНД НА ПУНКТЕ УПРАВЛЕНИЯ ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАКЕТОЙ В ЛУЧЕ, СПОСОБ ВЫДЕЛЕНИЯ N РАЗОВЫХ КОМАНД НА РАКЕТЕ ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431106C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТОМ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС | 2005 |
|
RU2291382C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241951C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2266514C1 |

Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, в которых применяются лучевые системы теленаведения с одноступенчатой модуляцией. Технический результат - упрощение реализации процесса наведения при сохранении перекрестной стрельбы с соседних пунктов управления, которая исключает перехват своей ракеты "чужим" пунктом управления. Предложен способ наведения телеориентируемой в луче ракеты, в котором формируют поле управления сканированием диаграммы направленности электромагнитного излучения относительно начала координат, совпадающего с центром поля управления, при котором изменяют параметры электромагнитного поля, преобразуют принимаемое электромагнитное излучение на ракете в электрический сигнал и декодируют его. Изменяют параметры электромагнитного излучения одноступенчатой модуляцией и присваивают каждой точке в структуре электромагнитного излучения адрес пункта управления, который соответствует ракете, управляемой с этого пункта управления, при этом выставляют адрес на пункте управления и на ракете до момента старта. Введение в ракетный комплекс на пункте управления блока задания адреса, а на ракете последовательно включенных блока установки адреса и дешифратора адреса упростило реализацию. 2 н.п. ф-лы, 4 ил.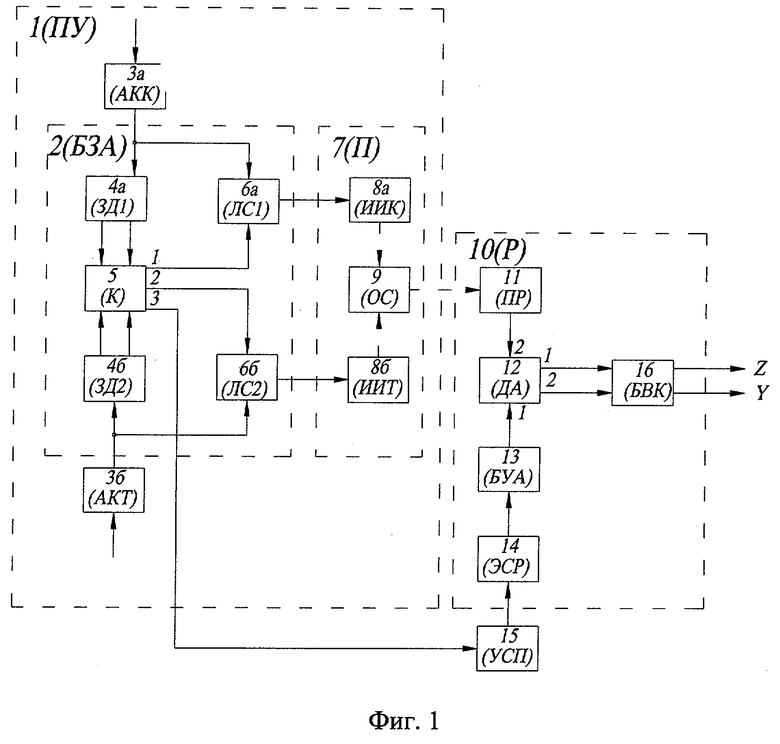
| Основы радиоуправления, под редакцией ВЕЙЦЕЛЯ В.А | |||
| и ТИПУГИНА В.Н., М., Советское радио, 1973, с.30, 31, 272-277 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

