Изобретение относится к области вооружения, в частности к ракетным комплексам.
Изобретение предназначено для обеспечения стрельбы малогабаритными управляемыми ракетами (УР), изначально предназначенными для стрельбы с воздушных носителей по наземным целям, с наземной пусковой установки.
Для поражения наземных целей управляемыми ракетами широко известны противотанковые ракетные комплексы (ПТРК), которые, как правило, имеют треногу, снабженную ракетой, и устройство наведения ракеты (патент Франция №2489499, 1982 г.).
Известен вариант применения управляемых ракет, запускаемых с воздушных носителей, к стрельбе с наземной пусковой установки (www.legguns.ru/boepripasy/protivotankovaya-upravlyaemaya-raketa-agm-114-hellfire-ssha.html. 20.11.2023 г.).
Известны самоходные ПТРК, характеризующиеся высокой автоматизацией обнаружения и подготовки выстрела, такие как «Хризантема-С» (Гущин Н. «Хризантема» аналогов не имеет // Военный парад. - 1998. - №10-12. - С. 128-129).
Для стрельбы днем и ночью на расстояние до 5,5 км известен переносной ПТРК «Корнет» (Томсон Р. Сравнение ПТРК 3-го поколения «Корнет» и TMGAT // Горизонты КБП. - С. 13-14), который выбран нами в качестве прототипа. Он содержит пусковую установку на треножном станке с системой наведения в горизонтальной и вертикальной плоскости, также в состав комплекса входит оптический прицел, аппаратура наведения и управления, тепловизионный прицел и транспортно-пусковой контейнер с управляемой ракетой, закрепленный на пусковой установке.
Недостатком такого комплекса является отсутствие средств измерения углов ориентирования пусковой установки в пространстве относительно системы координат стрельбы, поражение только тех целей, которые находятся в прямой видимости оператора пусковой установки, поражение целей в лобовую проекцию, а не сверху. Кроме того, недостатком прототипа является необходимость участия оператора в сопровождении ракеты на цель в течение всего времени ее полета.
Задачей предполагаемого изобретения является расширение возможностей применения противотанковых ракетных комплексов по реализации функции поражения целей, находящихся вне прямой видимости комплекса, с закрытых огневых позиций в верхнюю проекцию цели без необходимости оператору осуществлять наведение ракеты на цель в течение всего времени ее полета.
Указанная задача решается ракетным комплексом содержащим пусковую установку с системой наведения в горизонтальной и вертикальной плоскости, при этом, новым является то, что в него дополнительно введены полевой компьютер с автономным источником питания, блок автоматики с автономным источником питания, навигационный спутниковый приемник, средства ориентирования в горизонтальной и вертикальной плоскостях, а также по крену и тангажу, причем выход навигационного спутникового приемника подключен ко входу полевого компьютера, вход блока автоматики подключен к выходу полевого компьютера, а выход блока автоматики подключен к коммутационному разъему подключения транспортно-пускового контейнера ракеты, в блоке автоматики реализованы модуль управления, система выдачи управляемого питания, а также введен датчик наличия транспортно-пускового контейнера ракеты, а навигационный спутниковый приемник выполнен в виде датчика данных об исходной цифровой навигационной информации, включающей данные о системном времени, об эфемеридах и альманахах по космическим аппаратам системы спутниковой навигации.
Предлагаемое изобретение поясняется графическими материалами. На фиг. 1 представлена блок-схема устройства по 1 п. формулы.
Ракетный комплекс по п. 1 формулы изобретения (фиг. 1) содержит пусковую установку 1 с системой наведения пусковой установки в горизонтальной 2 и вертикальной 3 плоскости, полевой компьютер 4 с автономным источником питания 5, блок автоматики 6 с автономным источником питания 7, навигационный спутниковый приемник 8, средства ориентирования пусковой установки в горизонтальной плоскости 9, вертикальной плоскости, а также по крену и тангажу 10.
Выход навигационного спутникового приемника 8 подключается ко входу полевого компьютера 4.
Вход 15 блока автоматики 6 подключается к выходу полевого компьютера 4, а выход 16 блока автоматики подключен к коммутационному разъему 14 подключения транспортно-пускового контейнера ракеты 17.
В блоке автоматики 6 реализованы модуль управления 11 с коммутацией цифрового канала связи от полевого компьютера 4 к коммутационному разъему 14, система выдачи управляемого питания 12 на коммутационный разъем 14 для электропитания электронной аппаратуры управляемой ракеты, а также введен датчик наличия 13 транспортно-пускового контейнера 17 с управляемой ракетой на пусковой установке 1.
Предлагаемый ракетный комплекс функционирует следующим образом.
С помощью навигационного спутникового приемника 8 и полевого компьютера 4 определяют координаты местоположения пусковой установки, а также исходную цифровую навигационную информацию (системное время, альманахи и эфемериды по космическим аппаратам спутниковой навигации). Эти данные сохраняются в памяти полевого компьютера 4.
Компьютер полевой 4 предназначен для приема радиосигналов спутниковых навигационных систем типа ГЛОНАСС и GPS от навигационного спутникового приемника 8, ввода информации необходимой для расчета полетного задания УР, расчета полетного задания УР и углов наведения пусковой установки 1, записи полетного задания в УР и реализации циклограммы пуска УР.
Координаты местоположения пусковой установки совместно с введенной в полевой компьютер информацией о координатах местоположения цели и метеоданных используются для расчета параметров полетного задания управляемой ракеты.
На компьютере полевом 4 отображается информация о состоянии подсистем ракетного комплекса и реализован пользовательский интерфейс управления пуском УР.
Блок автоматики 6 обеспечивает информационный обмен с полевым компьютером 4, электропитание через коммутационный разъем 14 бортового оборудования управляемой ракеты по цепям постоянного тока номинальным напряжением, например, 27 В (выдача/снятие напряжения на УР осуществляется модулем управления 11 в соответствии с командами, получаемыми от полевого компьютера 4), дистанционную проверку через коммутационный разъем 14 факта наличия заряженной УР на пусковой установке 1 с помощью датчика наличия 13 транспортно-пускового контейнера, коммутацию магистрального последовательного интерфейса на управляемую ракету через коммутационный разъем 14 и управление блокировками выдачи напряжения на УР.
Пусковая установка 1 с помощью средств ориентирования 9 и 10 наводится в направлении цели в горизонтальной и вертикальной плоскости соответственно.
По команде с полевого компьютера 4 по цифровому каналу связи с блоком автоматики 6 осуществляется дистанционная подготовка управляемой ракеты к пуску, которая включает в себя следующие операции: подачу напряжения на управляемую ракету, передачу и запись в электронную аппаратуру ракеты рассчитанных установок полетного задания.
Кроме того, в управляемую ракету дополнительно передают исходную цифровую навигационную информацию (системное время, альманахи и эфемериды по космическим аппаратам спутниковой навигации), замеренные с помощью навигационного спутникового приемника 8.
Пуск управляемой ракеты осуществляется автоматически по команде, которую оператор выдает с полевого компьютера 4 в блок автоматики 6 и управляемую ракету.
Наведение управляемой ракеты на цель осуществляется по баллистической траектории в соответствии с заданными в полетном задании параметрами и способом наведения управляемой ракеты.
Ракетный комплекс по п. 1 формулы изобретения реализуется следующим образом.
Компьютер полевой 4 может быть выполнен, например, в виде защищенного ноутбука TS Strong@Master 7020Т [Каталог изделий НПО «Техника-Сервис», www.ts.ru]. Для реализации МПИ интерфейса по ГОСТ Р 52070-2003 может использоваться встраиваемый или внешне подключаемый модуль TA1-USB-01-C производства АО «Элкус».
В качестве навигационного приемника 8 может, например, использоваться навигационный приемник «Орион-М» (индекс 1480091, изготовитель АО «КБ «НАВИС»).
Датчик наличия 13 транспортно-пускового контейнера 17 управляемой ракеты на пусковой установке 1 может быть выполнен по следующей логике: если сопротивление между заданными контактами в коммутационном разъеме 14, контролируемое со стороны блока автоматики 6 менее 150 Ом, то транспортно-пусковой контейнер 17 управляемой ракеты заряжен на пусковую установку 1 и соединен с блоком автоматики 6, если сопротивление более 100 кОм, то транспортно-пусковой контейнер 17 управляемой ракеты не подключен.
Система выдачи управляемого питания 12 может быть выполнена в виде комбинированного ключа, который выставляется в положение «Напряжение на УР подано» если механический тумблер «Блокировка» на блоке автоматике 6 установлен в положение «Выкл.» и от полевого компьютера получена команда «Подать питание».
Электрическая стыковка полевого компьютера 4 с блоком автоматики 6 может быть выполнена проводом КВСФ-75 (ТУ 16-705.198-81) длиной до 100 м, что позволяет размещать оператора пусковой установки на безопасной дистанции от нее.
Электрическая стыковка блока автоматики 6 к коммутационному разъему 14 может быть выполнена проводом КВСФ-75 (ТУ 16-705.198-81) длиной 2-6 м.
Коммутационный разъем 14 подключения транспортно-пускового контейнера 17 управляемой ракеты может быть выполнен, например, в виде розетки 9-ВА1-4172К.160.
В качестве управляемой ракеты может быть применена малогабаритная управляемая ракета ТКБ-1030 (разработчик и изготовитель АО «КБП»).
В частном случае по п. 2 формулы изобретения в ракетном комплексе полевой компьютер 4 подключен к навигационному спутниковому приемнику 8 и блоку автоматики 6 по цифровому каналу связи.
Ракетный комплекс по п. 2 формулы изобретения реализуется следующим образом.
Выход навигационного спутникового приемника 8, например, по интерфейсу RS-232 подключается ко входу полевого компьютера 4.
Вход 15 блока автоматики 6, например, по магистральному последовательному интерфейсу (МПИ) по ГОСТ Р 52070-2003 подключается к выходу полевого компьютера 4.
В частном случае по п. 3 формулы изобретения в ракетном комплексе блок автоматики 6 подключен к коммутационному разъему 14 транспортно-пускового контейнера 17 ракеты по цифровому каналу связи.
Ракетный комплекс по п. 3 формулы изобретения реализуется следующим образом.
Вход 15 блока автоматики 6, например, по магистральному последовательному интерфейсу (МПИ) по ГОСТ Р 52070-2003 подключается к выходу полевого компьютера 4, а выход 16 блока автоматики, например, по МПИ по ГОСТ Р 52070-2003 подключен к коммутационному разъему 14 подключения транспортно-пускового контейнера ракеты 17, причем полевой компьютер 4 выполняет функции контроллера магистральной шины, а блок автоматики 6 и управляемая ракета - функции оконечного устройства.
В частном случае по п. 4 формулы изобретения в ракетном комплексе средства ориентирования пусковой установки в горизонтальной плоскости выполнены в виде прицела.
В качестве прицела может, например, использоваться прицел ПАМ-1 от миномета 2Б9 «Василек», или прицел ПАГ-17, используемый в автоматическом гранатометном комплексе АГС-30.
Прицел должен перед боевой работой устанавливаться соосно с транспортно-пусковым контейнером 17 управляемой ракеты.
В частном случае по п. 5 формулы изобретения в ракетном комплексе в качестве средств ориентирования пусковой установки в вертикальной плоскости и в плоскостях крена и тангажа используется квадрант.
В качестве квадранта - квадрант оптический НП3 КО-60 (изготовитель Новосибирский приборостроительный завод).
Предлагаемый ракетный комплекс функционирует следующим образом. Пусковая установка 1 наводится на цель с использованием прицела относительно известного ориентира. Значение угла вертикального наведения пусковой установки выставляется по значениям квадранта, устанавливаемого на транспортно-пусковой контейнер 17 управляемой ракеты. Кроме того, устанавливая квадрант на специальную плоскую площадку, размещенную на пусковой установке, последовательно замеряются значения крена и тангажа пусковой установки. Значения крена, тангажа и горизонтального угла наведения пусковой установки вводят в полевой компьютер 4 перед стрельбой.
Использование изобретения позволит расширить область применения малогабаритных управляемых ракет типа «земля-земля» и «воздух-земля» за счет реализации возможности их стрельбы с наземных пусковых установок.
Предложенное изобретение по сравнению с прототипом позволяет реализовать качественно новые свойства ракетного комплекса и повысить безопасность расчета ракетного комплекса за счет реализации стрельбы с закрытых огневых позиций без необходимости оператору осуществлять наведение ракеты на цель в течение всего времени ее полета, а также размещения оператора пусковой установки на безопасной дистанции от нее.
Кроме того, за счет использования навесных баллистических траекторий полета УР обеспечивается поражение цели в ее верхнюю проекцию, что повышает вероятность поражения цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС УПРАВЛЕНИЯ И СВЯЗИ ВЫНОСНОГО ПУНКТА УПРАВЛЕНИЯ ДЛЯ СТРЕЛЬБЫ УПРАВЛЯЕМЫМИ РАКЕТАМИ ИЗ ПУСКОВОЙ УСТАНОВКИ | 2013 |
|
RU2543437C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2013 |
|
RU2538509C1 |
| Двухсистемная управляемая ракета в транспортно-пусковом контейнере | 2023 |
|
RU2814065C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| Способ стрельбы управляемой ракетой | 2016 |
|
RU2621361C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ВОЗДУШНОЙ РАЗВЕДКИ НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ С ЦЕЛЬЮ ТОПОГЕОДЕЗИЧЕСКОГО, МЕТЕОРОЛОГИЧЕСКОГО И ДРУГИХ ВИДОВ ОБЕСПЕЧЕНИЯ ПУСКОВ (СБРОСОВ) УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННЫХ ГОЛОВОК САМОНАВЕДЕНИЯ | 2020 |
|
RU2771965C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2013 |
|
RU2534206C1 |

Изобретение относится к области вооружения, в частности к ракетным комплексам. Ракетный комплекс содержит пусковую установку с системой наведения в горизонтальной и вертикальной плоскостях, полевой компьютер с автономным источником питания, блок автоматики с автономным источником питания, навигационный спутниковый приемник, средства ориентирования в горизонтальной и вертикальной плоскостях, а также по крену и тангажу. Выход навигационного спутникового приемника подключен ко входу полевого компьютера, вход блока автоматики подключен к выходу полевого компьютера, а выход блока автоматики подключен к коммутационному разъему подключения транспортно-пускового контейнера ракеты. В блоке автоматики реализованы модуль управления, система выдачи управляемого питания, а также введен датчик наличия транспортно-пускового контейнера ракеты. Навигационный спутниковый приемник выполнен в виде датчика данных об исходной цифровой навигационной информации, включающей данные о системном времени, об эфемеридах и альманахах по космическим аппаратам системы спутниковой навигации. Технический результат – обеспечение возможности поражения цели, находящейся вне прямой видимости комплекса с закрытых огневых позиций. 4 з.п. ф-лы, 1 ил.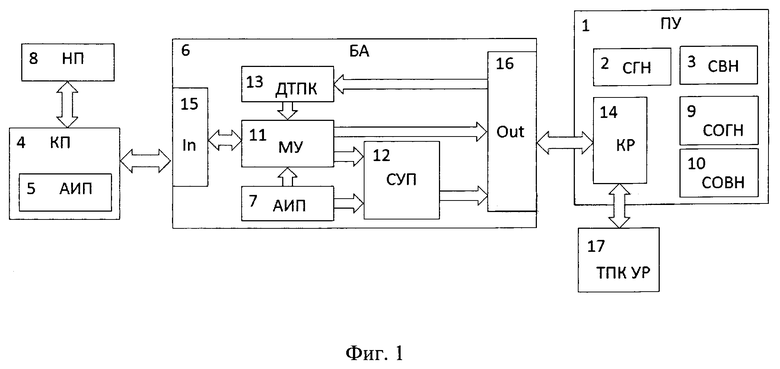
1. Ракетный комплекс, содержащий пусковую установку с системой наведения в горизонтальной и вертикальной плоскостях, отличающийся тем, что в него дополнительно введены полевой компьютер с автономным источником питания, блок автоматики с автономным источником питания, навигационный спутниковый приемник, средства ориентирования в горизонтальной и вертикальной плоскостях, а также по крену и тангажу, причем выход навигационного спутникового приемника подключен ко входу полевого компьютера, вход блока автоматики подключен к выходу полевого компьютера, а выход блока автоматики подключен к коммутационному разъему подключения транспортно-пускового контейнера ракеты, в блоке автоматики реализованы модуль управления, система выдачи управляемого питания, а также введен датчик наличия транспортно-пускового контейнера ракеты, также навигационный спутниковый приемник выполнен в виде датчика данных об исходной цифровой навигационной информации, включающей данные о системном времени, об эфемеридах и альманахах по космическим аппаратам системы спутниковой навигации.
2. Ракетный комплекс, выполненный по п. 1, отличающийся тем, что полевой компьютер подключен к навигационному спутниковому приемнику и блоку автоматики по цифровому каналу связи.
3. Ракетный комплекс, выполненный по пп. 1, 2, отличающийся тем, что блок автоматики подключен к коммутационному разъему транспортно-пускового контейнера ракеты по цифровому каналу связи.
4. Ракетный комплекс, выполненный по пп. 1-3, отличающийся тем, что средства ориентирования пусковой установки в горизонтальной плоскости выполнены в виде прицела.
5. Ракетный комплекс, выполненный по пп. 1-4, отличающийся тем, что в качестве средств ориентирования пусковой установки в вертикальной плоскости и в плоскостях крена и тангажа используется квадрант.
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| ПРОТИВОКОРАБЕЛЬНЫЙ РАКЕТНЫЙ КОМПЛЕКС С ЛЕТАЮЩИМ РОБОТОМ-НОСИТЕЛЕМ РАКЕТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2706295C2 |
| Самоходный ракетный комплекс | 2016 |
|
RU2626784C1 |
| Противотанковый ракетный комплекс | 2015 |
|
RU2612750C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ КОМПЛЕКС | 2015 |
|
RU2582437C1 |
| АГОНИСТЫ ОКСИТОЦИНОВЫХ РЕЦЕПТОРОВ | 2010 |
|
RU2539692C2 |

