Изобретение относится к области вооружения, а именно к ракетной технике, в частности к ракетам, вращающимся по углу крена, и может быть использовано в ракетных комплексах, в которых применяются лучевые системы теленаведения, системы самонаведения с подсветкой цели и др.
Известны способ формирования команд управления на ракете, вращающейся по углу крена [Патент России №2282129 от 14.12.04 г., МКИ7 F42B 15/01], и ракетный комплекс [Основы радиоуправления. /Под ред. В.А. Вейцеля и В.Н. Типугина. М., Сов. радио, 1973 г., стр.30, 31, 44, 45, 49 и 247]. Известный способ формирования команд управления на ракете используется, в том числе на стартовом участке для обеспечения ввода ракеты в зону управления (луча) системы теленаведения по лучу. Этот способ включает формирование сигнала вращения датчиком угла крена, декодирование принимаемых командных сообщений и последующую выработку из них сигналов управления ракетой по курсу и тангажу, при котором сигнал с датчика крена преобразуют в линеаризированный сигнал, который с учетом угла крена ракеты сравнивают с сигналами декодированных значений командных сообщений соответственно по курсу и тангажу, по результатам сравнения формируют сигналы команд управления ракетой в виде широтно-импульсного модулированного сигнала, при этом величину размаха линеаризованного сигнала устанавливают не зависимой от длительности сигнала вращения.
Ракетный комплекс, использующий этот способ, содержит пункт управления, в который входят прицел-прибор наведения (устройство системы управления) и устройство управления стартом (пусковое устройство), а также пусковую установку с ракетой, вращающейся по углу крена, в которую входят последовательно соединенные приемный тракт и автопилот, при этом вход приемного тракта связан с прицел-прибором наведения на этапе наведения ракеты на цель, а сама ракета перед стартом расположена на пусковой установке. Автопилот, например, выполнен в виде последовательно соединенных датчика угла крена, линеаризатора сигнала, релейного элемента и рулевого привода, при этом приемный тракт выходами по курсу и тангажу соединен с первым и вторым входами преобразователя координат (команд), третий и четвертый выходы которого соединены соответственно с выходами датчика угла крена [как в системе управления ракетой по патенту России №2282129 от 14.12.04 г., MKИ7 F42B 15/01].
В известном способе формирования команд управления на ракете, вращающейся по углу крена, с момента старта формируется первый креновый импульс, т.е. первый полный период для линеаризации сигнала. Однако построение линеаризованного сигнала начинается со второго кренового импульса - по величине длительности первого (предыдущего). Для уменьшения ошибки в течение первого кренового импульса строят линеаризированный сигнал, задаваясь среднестатистической величиной ожидаемой длительностью первого кренового импульса, либо блокируют рули.
Следовательно, недостатком известного технического решения является низкая точность формирования первой команды с момента старта ракеты, из-за которой ракета, например, в лучевой системе теленаведения с узкой диаграммой направленности луча, может не ввестись в луч, т.е. стать неуправляемой.
Задачей настоящего изобретения (способа и устройства) является повышение точности за счет исключения ошибки в момент формирования команды управления первым креновым импульсом, что позволяет также уменьшить величину минимальной прицельной дальности ракетного комплекса.
Поставленная задача решается за счет того, что в способе ввода в зону управления ракеты, вращающейся по углу крена, включающем формирование сигнала, характеризующего вращение ракеты в виде креновых импульсов, выработку из них линеаризированного знакопеременного сигнала с постоянной величиной амплитуды и преобразование с момента ввода ракеты в зону управления принимаемых на ракете декодированных сигналов в команды управления, до момента начала формирования линеаризированного знакопеременного сигнала выставляют сигналы, характеризующие преобразованный и линеаризированный сигналы, постоянными, но отличными друг от друга, из которых формируют релейную команду управления по тангажу с максимальной величиной, соответствующей отклонению ракеты вверх, а после начала формирования линеаризированного сигнала и до момента ввода ракеты в зону управления выставляют величины декодированных сигналов команд управления по курсу и тангажу равными нулю.
Ракетный комплекс, содержащий пункт управления с прицел-прибором наведения и устройством управления стартом, а также пусковую установку с ракетой, вращающейся по углу крена, с приемный трактом, датчиком угла крена, линеаризатором сигнала и последовательно соединенными преобразователем команд, релейным элементом и рулевым приводом, причем курсовой и тангажный выходы приемного тракта соединены с первым и вторым входами преобразователя команд, третий и четвертый входы которого соединены с первым и вторым входами линеаризатора сигнала и с первым и вторым выходами датчика угла крена, первый выход линеаризатора сигнала соединен со вторым входом релейного элемента, а прицел-прибор наведения на управляемом участке полета ракеты связан с входом приемного тракта, ракета снабжена таймером и последовательно соединенными устройством включения бортового источника питания, формирователем разового импульса и блоком установки начальной команды, при этом вход устройства включения бортового источника питания связан с выходом устройства управления стартом, второй вход блока установки начальной команды соединен со вторым выходом линеаризатора сигнала, выход блока установки начальной команды соединен с входом установки в единичное состояние линеаризатора сигнала, а выход таймера соединен с входом обнуления приемного тракта.
Заявленный способ ввода в зону управления ракеты, вращающейся по углу крена, реализуется следующим образом. Ракета в полете вращается по углу крена, например за счет разворота лопастей стабилизаторов, и на ней формируют сигнал, характеризующий вращение ракеты в виде электрических импульсов, т.е. креновые импульсы, а с момента ввода ракеты в зону управления преобразуют декодированные принимаемые на ней сигналы в команды управления.
Формируемые креновые импульсы имеют длительность t, определяемую величиной угла φ, образуемого при вращении ракеты с угловой скоростью ω. При величине, например ω=π/2, за каждый креновый период вращении ракеты по углу крена сформируются четыре импульса (четыре изменяемых уровня напряжения), из которых вырабатывают линеаризированный знакопеременный сигнал, величина амплитуды которого постоянная и не зависит от длительности креновых импульсов.
Построение линеаризированного сигнала (его амплитуды) задается длительностью предыдущего кренового импульса, а значит, в течение первого кренового импульса (с момента начала вращения ракеты по углу крена) точное построение линеаризированного сигнала невозможно, т.к. отсутствует предыдущий импульс. Поэтому до момента появления второго кренового импульса, т.е. до момента начала формирования линеаризированного знакопеременного сигнала, выставляют величины преобразованного и линеаризированного сигналов постоянными, но отличными друг от друга. Например, величину линеаризированного сигнала, отличающуюся от нулевого значения, т.е. U≠0, например равной амплитуде линеаризированного сигнала, а величину преобразованного сигнала по тангажу - равную нулю. Из этих двух сигналов формируют максимальную величину релейной команды управления по тангажу, например, с помощью компаратора. Эта команда (по знаку) должна соответствовать отклонению ракеты вверх.
С момента начала формирования линеаризированного сигнала и до момента обеспечения ввода ракеты в зону управления выставляют величины декодированных сигналов по курсу и тангажу равными нулю, формируя тем самым величины релейных команд управления равными нулю.
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1-3.
На фиг.1 приведена структурная электрическая схема ракетного комплекса, где представлены: 1 - пункт управления (ПУ), 2 - прицел-прибор наведения (ППН), 3 - устройство управления стартом (УУС), 4 - ракета, вращающаяся по углу крена, 5 - приемный тракт (ПТ), 6 - таймер (Т), 7 - преобразователь команд (ПК), 8 - датчик угла крена (ДУК), 9 - релейный элемент (РЭ), 10 - линеаризатор сигнала (ЛС), 11 - устройство включения бортового источника питания (УВБИ), 12 - рулевой привод (РП), 13 - блок установки начальной команды (БУНК), 14 - формирователь разового импульса (ФРИ).
На фиг.2 приведена структурная электрическая схема блока установки начальной команды 13 в качестве примера выполнения, где представлены: 15 - инвертор (НЕ), 16 - ″D″ - триггер (ДТ).
На фиг.3 приведены эпюры сигналов, где представлены: а и б - сигналы, соответственно, на первом и втором выходах датчика угла крена 8, в - сигнал на втором выходе линеаризатора сигнала 10, г - сигнал на выходе блока установки начальной команды 13, д - сигнал (в аналоговом виде) на первом выходе линеаризатора сигнала 10, е - сигнал на выходе релейного элемента 9.
Заявленный ракетный комплекс содержит последовательно соединенные преобразователь команд 7, релейный элемент 9 и рулевой привод 12. Курсовой и тангажный выходы приемного тракта 5 соединены с первым и вторым входами преобразователя команд 7, третий и четвертый входы которого соединены с первым и вторым входами линеаризатора сигнала 10 и с первым, и вторым выходами датчика угла крена 8. Первый выход линеаризатора сигнала 10 соединен со вторым входом релейного элемента 9. Выход прицел-прибора наведения 2 - на управляемом участке полета ракеты 3 связан со входом приемного тракта 5. Последовательно соединены устройство включения бортового источника питания 11, формирователь разового импульса 14 и блок установки начальной команды 13. Вход устройства включения бортового источника питания 11 связан с выходом устройства управления стартом 3. Второй вход блока установки начальной команды 13 соединен со вторым выходом линеаризатора сигнала 10, выход блока установки начальной команды 13 соединен со входом установки в единичное состояние линеаризатора сигнала 10, а выход таймера 6 соединен со входом обнуления приемного тракта 5.
Прицел-прибор наведения 2, например, в лучевой системе теленаведения с оптическим каналом связи выполняет ту же функцию, что и передающий тракт в известном устройстве и может быть выполнен в виде передающего прибора, формирующего пространственную структуру электромагнитного поля, параметры которого функционально связаны с координатами соответствующих точек пространства в системе декартовых координат "ZOY", где "Z" - величина координаты по курсу, "Y" - величина координаты по тангажу, "О" - начало координат, и является точкой прицеливания.
Таким образом, прицельную марку (прицел) оптически юстируют с началом координат, т.е. с "О". Формирование поля управления осуществляют поочередным сканированием диаграммы направленности луча в двух взаимно перпендикулярных направлениях по "Z" и "Y", при этом пропорционально углу сканирования относительно "О" изменяют величину команд, а также соответственно изменяют знак. Изменение величины команд производят, например, по закону время-импульсной модуляции (ВИМ), причем проекция диаграммы направленности на картинную плоскость при сканировании по горизонтали (канал курса "Z") вытянута в виде узкой полоски по вертикали, а при сканировании по вертикали (канал тангажа "Y") - по горизонтали.
Устройство управления стартом 3 можно выполнить, например, в виде ключа "Старт", при нажатии которого подается напряжение с источника питания пункта управления 1.
Приемный тракт 5 может быть выполнен как приемный тракт в системе управления ракетой по патенту России №2282129, при этом между приемником и блоком выделения координат в блоке 5 стоят два ключа, которые разрывают соответствующие цепи и устанавливают нулевые значения координат по курсу и тангажу (нулевые логические уровни цифровых сигналов) на выходах приемного тракта (управление ключами осуществляют по входу "R" на фиг.1 в блоке 5). Сам блок выделения координат может быть выполнен как устройство измерения координат по патенту России №2223514 по заявке №2001134353 от 17.12.01 г. МКИ7 G01S 13/72.
Датчик угла крена 8, релейный элемент 9, рулевой привод 12, преобразователь команд 7 и линеаризатор сигнала 10 могут быть выполнены как в системе управления ракетой по патенту России №2282129. При этом в известный линеаризатор сигнала входит интегратор 19 [см. фиг.3 в описании заявке №2004136513 от 14.12.04 г., МКИ7 F42В 15/01], в состав которого входят "D"-триггеры, например выполненные на микросхеме 564ТМ2, в которых используют входы "S" (для установки на выходе единичного логического состояния). Кроме того, линеаризатор сигнала 6 и схема "исключающее ИЛИ" 4, применяемые в известном устройстве [фиг.1 в описании патента №2282129], в заявляемом устройстве объединены в одно.
Устройство включения бортового источника питания 11, например электровоспламенитель термобатареи, используется в качестве бортового источника питания. Формирователь разового импульса 14, например устройство, формирующее импульс в момент выхода бортового источника питания на рабочий режим, предназначенное для установки цифровой части бортовой аппаратуры в исходное состояние, содержит последовательно соединенные батарею, стабилизатор напряжения и компаратор, второй вход которого через делитель напряжения, шунтированный конденсатором, соединен с батареей [патент России №2220401 от 17.04.02 г., MKИ7 F42B 15/01].
Заявленный ракетный комплекс, реализующий способ ввода в зону управления ракеты, вращающейся по углу крена, приведенный на фиг.1, работает следующим образом. В исходном состоянии ракета 4 расположена на пусковой установке и связана с устройством управления стартом 3 на пункте управления 1, размещенным, например, на пусковой установке. При этом ракета 4 соединена с пунктом управления 1, например, через пусковую установку электрически с помощью разрывного кабеля. В момент старта при нажатии оператором ключа "Старт" на устройство включения бортового источника питания 11 поступает электрическое напряжение с устройства управления стартом 3 и устройство 11 включает бортовой источник питания, расположенный в формирователе разового импульса 14. В момент выхода бортового источника питания на рабочий режим на выходе формирователя 14 формируется импульс с единичным логическим уровнем, который поступает на первый вход блока установки начальной команды 13, т.е. на "R" вход "D" триггера 16, и на его инверсном выходе, а значит, и на выходе блока 13 формируется сигнал с единичным логическим уровнем (эпюра "г" на фиг.3).
С момента старта ракета 4 вращается по углу крена, при этом на первом и втором выходах датчика угла крена 8 вырабатываются соответственно два сигнала (эпюры "а" и "б" на фиг.3), которые поступают на первый и второй входы линеаризатора сигнала 10. В линеаризаторе сигнала 10 с помощью логической схемы "исключающее ИЛИ" формируют из этих двух сигналов креновые импульсы (эпюра "в" на фиг.3). Эти креновые импульсы поступают на инвертор 15 в блоке установки начальной команды 13. При этом задний фронт первого (" -Y") импульса (эпюра "в" на фиг.3), который на выходе инвертора будет иметь перепад из нулевого уровня в единичный, поступает на вход "С " "D" триггера 16 и запишет величину логической единицы со входа "D" на его инверсный выход в виде нулевого логического уровня.
Таким образом, на инверсном выходе триггера 16 сформируется импульс с единичным логическим уровнем (эпюра "г" на фиг.3), который поступит с выхода блока установки начальной команды 13 на вход "S" (установки в единичное логическое состояние) линеаризатора сигнала 10. Этот импульс установит разряды двоичного числа на выходе линеаризатора сигнала 10 в единичное логическое состояние (эпюра "д" на фиг.3) в течение первого кренового импульса "-Y" (эпюра "в" на фиг.3).
Следовательно, с момента выхода бортового источника питания на рабочий режим и до момента появления второго кренового импульса "-Z" на выходе линеаризатора сигнала 10 сформируется сигнал с амплитудой равной, например, амплитуде линеаризованного сигнала, а после его окончания, начиная со второго импульса ("-Z") сформируется линеаризированный сигнал (эпюра "д" на фиг.3).
Таймер 6 начинает отсчет времени, т.е. запускается, например, формирователем разового импульса 14, либо передним фронтом первого кренового импульса (эпюра "в" на фиг.3) и т.д. и вырабатывает блокирующий импульс, который устанавливает на выходах по курсу "Z" и тангажу "Y" приемного тракта 5 нулевые значения. Сигналы с тангажного и курсового выходов приемного тракта 5 поступают на первый и второй входы преобразователя команд 7, на третий и четвертый входы которого подаются сигналы с датчика угла крена 8. На выходе преобразователя команд 7 в каждую четверть периода вращения ракеты по углу крена формируются команды (в данном случае равные нулю), которые поступают на первый вход релейного элемента, на второй вход которого поступает сигнал с выхода линеаризатора сигнала 10 (эпюра "д" на фиг.3). На выходе релейного элемента 9 вырабатывается широтно-импульсный модулированный командный сигнал (эпюра "е" на фиг.3), который подается на рулевой привод 12. Как следует из эпюры командного сигнала, величина команды всегда в течение первого кренового импульса равна единице (максимальная величина) и направлена вверх, что улучшает встреливание ракет в луч.
При снятии блокирующего импульса, вырабатываемого таймером 6, например, в заданный программный момент времени, когда ракета 4 вошла в зону управления (в луч), она начинает наводиться на цель с пункта управления 1 прицел-прибора наведения 2.
Для исключения первоначального участка "Z" (изображенного пунктиром на фиг.3), на котором формируется ошибочная команда, ракету, например, принудительно закручивают при движении ее в контейнере, при этом она не отрабатывает эту ошибочную команду.
Следовательно, предлагаемые способ ввода в зону управления ракеты, вращающейся по углу крена, и ракетный комплекс позволяют обеспечить ввод ракеты в зону управления при исключении ошибки в момент формирования команды управления первым креновым импульсом, т.е. когда отсутствует линеаризованный сигнал, что позволяет уменьшить величину минимальной прицельной дальности ракетного комплекса.
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано в ракетных комплексах с ракетами, вращающимися по углу крена на траектории полета. Технический результат - исключение ошибки в момент начала формирования команд управления, что позволяет уменьшить величину минимальной прицельной дальности. Предложен способ ввода в зону управления ракеты, вращающейся по углу крена, при котором до момента начала формирования линеаризированного знакопеременного сигнала выставляют величины преобразованного и линеаризированного сигналов постоянными, но отличными друг от друга, из которых формируют максимальную релейную величину команды управления по тангажу, соответствующую отклонению ракеты вверх. После начала формирования линеаризованного сигнала выставляют величины декодированных сигналов по курсу и тангажу равными нулю до момента ввода ракеты в зону управления. Введение в ракетный комплекс на ракете таймера и последовательно соединенные устройства включения бортового источника питания, формирователя разового импульса и блока установки начальной команды исключило ошибку в момент начала формирования команд управления. 2 н.п. ф-лы, 3 ил.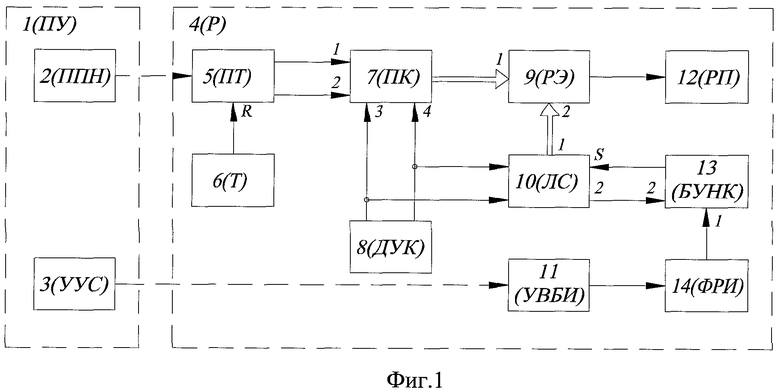
1. Способ ввода в зону управления ракеты, вращающейся по углу крена, включающий формирование сигнала, характеризующего вращение ракеты в виде креновых импульсов, выработку из них линеаризированного знакопеременного сигнала с постоянной величиной амплитуды и преобразование с момента ввода ракеты в зону управления принимаемых на ракете декодированных сигналов в команды управления, отличающийся тем, что до момента начала формирования линеаризированного знакопеременного сигнала выставляют сигналы, характеризующие преобразованный и линеаризированный сигналы, постоянными, но отличными друг от друга, из которых формируют релейную команду управления по тангажу с максимальной величиной, соответствующей отклонению ракеты вверх, а после начала формирования линеаризированного сигнала и до момента ввода ракеты в зону управления выставляют величины декодированных сигналов команд управления по курсу и тангажу равными нулю.
2. Ракетный комплекс, содержащий пункт управления с прицел-прибором наведения и устройством управления стартом, а также пусковую установку с ракетой, вращающейся по углу крена, с приемным трактом, датчиком угла крена, линеаризатором сигнала и последовательно соединенными преобразователем команд, релейным элементом и рулевым приводом, причем курсовой и тангажный выходы приемного тракта соединены с первым и вторым входами преобразователя команд, третий и четвертый входы которого соединены с первым и вторым входами линеаризатора сигнала и с первым и вторым выходами датчика угла крена, первый выход линеаризатора сигнала соединен со вторым входом релейного элемента, а прицел-прибор наведения на управляемом участке полета ракеты связан с входом приемного тракта, отличающийся тем, что ракета снабжена таймером и последовательно соединенными устройством включения бортового источника питания, формирователем разового импульса и блоком установки начальной команды, при этом вход устройства включения бортового источника питания связан с выходом устройства управления стартом, второй вход блока установки начальной команды соединен со вторым выходом линеаризатора сигнала, выход блока установки начальной команды соединен с входом установки в единичное состояние линеаризатора сигнала, а выход таймера соединен с входом обнуления приемного тракта.

