Изобретение относится к радионавигации и может быть использовано для решения задач высокоточного определения плановых координат двух потребителей информации космических навигационных систем (КНС), компактно располагающихся на подготовленных в радионавигационном отношении автомобильных дорогах, железнодорожных путях и улицах городов и населенных пунктов в отсутствие близко расположенных контрольно-корректирующих станций (ККС) или при выходе из строя по различным причинам. Под компактным расположением потребителей информации КНС понимается такое их расположение, при котором расстояние между ними обеспечивает прием радионавигационных сигналов от навигационных космических аппаратов (НКА) одного и того же созвездия, видимых над плоскостями их местных горизонтов. Подготовленными в радионавигационном отношении считаются дороги, пути и улицы, прямолинейные участки которых описаны навигационными функциями с известными коэффициентами, например для плановых координат х и y:

где х0ij и y0ij - известные координаты некоторой начальной точки i-го прямолинейного участка j-й дороги; αij - известный коэффициент, относящийся к i-му участку j-й дороги. Координаты x0ij, y0ij и коэффициент αij вычисляются заблаговременно путем проведения многократных навигационных определений с использованием средств КНС в дифференциальном режиме и последующей статистической обработки полученных оценок плановых координат дорог.
Известно устройство для радионавигационного определения плановых координат потребителя информации КНС [1, с.10], содержащее блоки бортовой аппаратуры, размещенные на трех и более видимых потребителем и определенным образом размещенных относительно него навигационных космических аппаратах (НКА), а также блок навигационной аппаратуры потребителя (НАП), преобразующий принимаемые радионавигационные сигналы, излученные блоками бортовой аппаратуры НКА, в оценки координат потребителя. Недостатком известного устройства является высокий уровень систематических погрешностей оценок плановых координат, обусловленный погрешностями знания координат НКА, неточным знанием параметров атмосферы и рассинхронизацией шкал времени НКА.
Наиболее близким по технической сущности и достигаемому эффекту является устройство для радионавигационного определения плановых координат потребителя информации КНС [1, с.287], работающее в дифференциальном режиме и содержащее не менее трех блоков бортовой аппаратуры НКА, два блока навигационной аппаратуры потребителя и контрольно-корректирующей станции (ККС), блок вычисления поправок, блок коррекции оценок координат потребителя, модулятор, демодулятор, передатчик, приемник и две антенны потребителя и ККС, выходы блоков бортовой аппаратуры НКА подключены соответственно ко входам блока НАП и ККС, первый и второй выходы блока вычисления поправок подключены соответственно к первому и второму входам модулятора, соединенного через передатчик, первую и вторую антенны, приемник с демодулятором, первый и второй выход которого подключены соответственно к первому и второму входам блока коррекции оценок координат.
Недостатком известного устройства является возрастание уровня систематических погрешностей оценок плановых координат потребителя при удалении его от ККС или резкий рост уровня систематических погрешностей оценок плановых координат потребителя при выходе из строя по различным причинам близко расположенной к потребителю ККС.
Целью изобретения является обеспечение не ниже точности в дифференциальном режиме высокой точности радионавигационного определения в дифференциальном режиме плановых координат потребителей при их значительном удалении от ККС или при выходе ее из строя по различным причинам.
Указанная цель достигается тем, что в устройство для радионавигационного определения плановых координат двух потребителей информации КНС дополнительно введены первый и второй блоки памяти, второй приемопередатчик, первый и второй блоки оценивания плановых координат, содержащие каждый первый, второй, третий, четвертый, пятый, шестой и седьмой блоки вычитания, первый и второй блоки перемножения, первый, второй и третий сумматоры, блок деления, причем первый выход первого блока НАП подключен к первому входу пятого блока вычитания, являющегося первым входом первого блока оценивания плановых координат, а также к первому входу модулятора, являющегося первым входом первого приемопередатчика, второй выход первого блока НАП подключен к первому входу второго блока вычитания, являющегося вторым входом первого блока оценивания плановых координат, а также ко второму входу модулятора, являющегося вторым входом первого приемопередатчика, третий выход первого блока НАП соединен с четвертым входом первого блока памяти, первый выход которого подключен к третьему входу модулятора, являющегося третьим входом первого приемопередатчика, а также к первому входу второго сумматора и второму входу пятого блока вычитания, которые являются третьим входом первого блока оценивания плановых координат, второй выход первого блока памяти подключен к первому входу первого сумматора и второму входу второго блока вычитания, которые являются четвертым входом первого блока оценивания плановых координат, а также к четвертому входу модулятора, являющегося четвертым входом первого приемопередатчика, третий выход первого блока памяти подключен к первому входу первого блока перемножения и первому входу первого блока вычитания, которые являются пятым входом первого блока оценивания плановых координат, а также к пятому входу модулятора, являющегося пятым входом первого приемопередатчика, первый, второй, третий, четвертый и пятый выходы демодулятора, являющегося соответственно первым, вторым, третьим, четвертым и пятым выходами первого приемопередатчика, подключены соответственно к шестому, седьмому, восьмому, девятому и десятому входам второго блока оценивания плановых координат, первый выход второго приемопередатчика подключен к первому входу седьмого блока вычитания, являющегося шестым входом первого блока оценивания плановых координат, второй выход второго приемопередатчика подключен к первому входу четвертого блока вычитания, являющегося седьмым входом первого блока оценивания плановых координат, третий выход второго приемопередатчика подключен ко второму входу седьмого блока вычитания, являющегося восьмым входом первого блока оценивания плановых координат, четвертый выход второго приемопередатчика подключен ко второму входу четвертого блока вычитания, являющегося девятым входом первого блока оценивания плановых координат, пятый выход второго приемопередатчика подключен ко второму входу первого блока вычитания и второму входу второго блока перемножения, которые являются десятым входом первого блока оценивания плановых координат, первый и второй выходы второго блока НАП подключены соответственно к первому и второму входам второго блока оценивания плановых координат, а также соответственно к первому и второму входам второго приемопередатчика, третий выход второго блока НАП соединен с четвертым входом второго блока памяти, первый, второй и третий выходы которого подключены соответственно к третьему, четвертому и пятому входам второго блока оценивания плановых координат, а также соответственно к третьему, четвертому и пятому входам второго приемопередатчика, выход пятого блока вычитания подключен к первому входу шестого блока вычитания, второй вход которого соединен с выходом седьмого блока вычитания, выход второго блока вычитания подключен к первому входу третьего блока вычитания, второй вход которого соединен с выходом четвертого блока вычитания, выход шестого блока вычитания подключен к первому входу второго блока перемножения, выход которого соединен с первым входом третьего сумматора, выход третьего блока вычитания подключен ко второму входу третьего сумматора, выход которого соединен с первым входом блока деления, второй вход которого соединен с выходом первого блока вычитания, выход блока деления подключен ко вторым входам первого блока перемножения и второго сумматора, выход которого является первым выходом первого блока оценивания плановых координат и первым выходом устройства, выход первого блока перемножения подключен ко второму входу первого сумматора, выход которого является вторым выходом первого блока оценивания плановых координат и вторым выходом устройства, первый и второй выходы второго блока оценивания плановых координат являются соответственно третьим и четвертым выходами устройства, первый, второй и третий входы первого блока памяти являются соответственно первым, вторым и третьим входами устройства, первый, второй и третий входы второго блока памяти являются соответственно четвертым, пятым и шестым входами устройства.
Такая совокупность признаков предлагаемого устройства по сравнению с прототипом показывает, что оно отличается наличием новых элементов: двух блоков памяти, хранящих значения коэффициентов навигационных функций, и двух блоков оценивания плановых координат, содержащих каждый семь блоков вычитания, два блока перемножения, три сумматора, блок деления и их связями между собой и остальными элементами схемы.
Таким образом, заявляемое устройство соответствует критерию «новизна».
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь введенные элементы широко известны.
Однако при их введении в указанной связи между собой и с остальными элементами схемы в заявляемое устройство для радионавигационного определения плановых координат двух потребителей информации космических навигационных систем указанные элементы проявляют новые свойства, состоящие в учете навигационной информации, содержащейся в значениях коэффициентов навигационных функций, описывающих участки дорог, на которых располагаются потребители, а также в оценках плановых координат потребителей, полученных их НАП в обычном режиме радионавигационных определений по сигналам НКА одного и того же созвездия. Это позволяет сделать вывод о соответствии технического решения критерию «изобретательский уровень».
При совместной обработке каждым из двух компактно расположенных потребителей оценок своих собственных плановых координат, оценок плановых координат другого потребителя, с учетом навигационных функций участков дорог, на которых они располагаются, происходит устранение одинаковых для потребителей систематических погрешностей оценок их плановых координат и уменьшение дисперсии случайных погрешностей оценок по сравнению с дифференциальным режимом радионавигационных определений. Это позволяет существенно повысить точность радионавигационных определений плановых координат потребителей информации КНС в заявляемом устройстве по сравнению с прототипом.
Действительно, оценим выигрыш в точности заявляемого устройства по сравнению с прототипом в виде двух отношений

Здесь δОДР и δО - остаточные обобщенные систематические погрешности навигационных определений соответственно прототипа (в дифференциальном режиме) и заявляемого устройства.
SРKrДР и SPKr - следы корреляционных матриц КrДР и Кr случайных погрешностей оценок навигационных определений соответственно прототипа и заявляемого устройства. Верхние границы погрешностей δОДР и δО задаются выражениями вида [2, с.234]
где  , δxi, δyi и δzi - систематические погрешности эфемерид i-го HKA;
, δxi, δyi и δzi - систематические погрешности эфемерид i-го HKA;
LДР и LП - удаления соответственно потребителя, работающего в дифференциальном режиме, от ККС и двух потребителей друг от друга;
ДiKKC и ДiП - дальности от i-го HKA до соответственно ККС и одного из пары потребителей.
Полагая, что ДiKKC=ДiП, получим
Компактное расположение потребителей предполагает, что LП≤10...50 км. Вместе с тем протяженность рабочей зоны локальных дифференциальных подсистем (ДПС) составляет 50...200 км, региональных ДПС - от 400...500 до 2000 км, а широкозонных ДПС - до 5000 км [2, с.238, 240, 241]. Поэтому выигрыш в точности по систематическим погрешностям заявляемого устройства по сравнению с прототипом согласно выражению (6) составит величину от 1 до 20 раз (локальные ДПС), от 8 до 200 раз (региональные ДПС) и от 100 до 500 раз (широкозонные ДПС).
В дифференциальном режиме навигационных определений плановых координат

где  и
и  - дисперсии случайных погрешностей оценок координат потребителя, полученных в обычном режиме навигационных определений.
- дисперсии случайных погрешностей оценок координат потребителя, полученных в обычном режиме навигационных определений.
Для заявляемого устройства, например, для первого потребителя

где α1 и α2 - коэффициенты функций вида (1), относящиеся к некоторым участкам дорог, на которых располагаются соответственно первый и второй потребители.
Для второго потребителя

Полагая, что  , получим
, получим
Наиболее благоприятная ситуация для навигационных определений пары потребителей складывается тогда, когда они располагаются на участках дорог, взаимно перпендикулярных друг другу. В этом случае α2=-1/α1, угол наклона участков дорог равен 90° и согласно выражению (10)  . При увеличении или уменьшении угла наклона участков дорог величина ωСЛ уменьшается и достигает значения, равного единице, при угле наклона дорог 135° или 35°. Следовательно, выигрыш в точности по случайным погрешностям заявляемого устройства по сравнению с прототипом составит величину от 1 до 1,4 раза при изменении угла наклона участков дорог от 45° до 135°.
. При увеличении или уменьшении угла наклона участков дорог величина ωСЛ уменьшается и достигает значения, равного единице, при угле наклона дорог 135° или 35°. Следовательно, выигрыш в точности по случайным погрешностям заявляемого устройства по сравнению с прототипом составит величину от 1 до 1,4 раза при изменении угла наклона участков дорог от 45° до 135°.
Это, а также реализуемость блоков предлагаемого устройства на стандартных, выпускаемых промышленностью элементах позволяет делать вывод о соответствии технического решения критерию «промышленная применимость».
На чертеже представлена структурная схема устройства для радионавигационного определения плановых координат двух потребителей информации КНС.
Устройство содержит первый 1, второй 2 и третий 3 блоки бортовой аппаратуры НКА, первый блок 4 памяти, первый блок 5 оценивания плановых координат, первый блок 6 НАП, первый приемопередатчик 7, второй приемопередатчик 8, второй блок 9 оценивания плановых координат, второй блок 10 НАП, второй блок 11 памяти, первый сумматор 12, второй сумматор 13, первый блок 14 перемножения, третий сумматор 15, блок 16 деления, первый блок 17 вычитания, второй блок 18 перемножения, второй блок 19 вычитания, третий блок 20 вычитания, четвертый блок 21 вычитания, пятый блок 22 вычитания, шестой блок 23 вычитания, седьмой блок 24 вычитания, модулятор 25, передатчик 26, первую антенну 27, демодулятор 28, приемник 29, вторую антенну 30.
Выходы первого 1, второго 2 и третьего 3 блоков бортовой аппаратуры НКА подключены соответственно к первым, вторым и третьим входам первого 6 и второго 10 блоков НАП, модулятор 25 соединен через передатчик 26, первую антенну 27, вторую антенну 30, приемник 29 с демодулятором 28, первый выход первого блока 6 НАП подключен к первому входу пятого блока 22 вычитания, являющегося первым входом первого блока 5 оценивания плановых координат, а также к первому входу модулятора 25, являющегося первым входом первого приемопередатчика 7, второй вход первого блока 6 НАП подключен к первому входу второго блока 19 вычитания, являющегося вторым входом первого блока 5 оценивания плановых координат, а также ко второму входу модулятора 25, являющегося вторым входом первого приемопередатчика 7, третий выход первого блока 6 НАП соединен с четвертым входом первого блока 4 памяти, первый выход которого подключен к третьему входу модулятора 25, являющегося третьим входом первого приемопередатчика 7, а также к первому входу второго сумматора 13 и второму входу пятого блока 22 вычитания, которые являются третьим входом первого блока 5 оценивания плановых координат, второй выход первого блока 4 памяти подключен к первому входу первого сумматора 12 и второму входу второго блока 19 вычитания, которые являются четвертым входом первого блока 5 оценивания плановых координат, а также к четвертому входу модулятора 25, являющегося четвертым входом первого приемопередатчика 7, третий выход первого блока 4 памяти подключен к первому входу первого блока 14 перемножения и первому входу и первому входу первого блока 17 вычитания, которые являются пятым входом первого блока 5 оценивания плановых координат, а также к пятому входу модулятора 25, являющегося пятым входом первого приемопередатчика 7, первый, второй, третий, четвертый и пятый выходы демодулятора 28, являющиеся соответственно первым, вторым, третьим, четвертым и пятым выходами первого приемопередатчика 7, подключены соответственно к шестому, седьмому, восьмому, девятому и десятому входам второго блока 9 оценивания плановых координат, первый выход второго приемопередатчика 8 подключен к первому входу седьмого блока 24 вычитания, являющегося шестым входом первого блока 5 оценивания плановых координат, второй выход второго приемопередатчика 8 подключен к первому входу четвертого блока 21 вычитания, являющегося седьмым входом первого блока 5 оценивания плановых координат, третий выход второго приемопередатчика 8 подключен ко второму входу седьмого блока 24 вычитания, являющегося восьмым входом первого блока 5 оценивания плановых координат, четвертый выход второго приемопередатчика 8 подключен ко второму входу четвертого блока 21 вычитания, являющегося девятым входом первого блока 5 оценивания плановых координат, пятый выход второго приемопередатчика 8 подключен ко второму входу первого блока 17 вычитания и второму входу второго блока 18 перемножения, которые являются десятым входом первого блока 5 оценивания плановых координат, первый и второй выходы второго блока 10 НАП подключены соответственно к первому и второму входам второго блока 9 оценивания плановых координат, а также соответственно к первому и второму входам второго приемопередатчика 8, третий выход второго блока 10 НАП соединен с четвертым входом второго блока 11 памяти, первый, второй и третий выходы которого подключены соответственно к третьему, четвертому и пятому входам второго блока 9 оценивания плановых координат, а также соответственно к третьему, четвертому и пятому входам второго приемопередатчика 8, выход пятого блока 22 вычитания подключен к первому входу шестого блока 23 вычитания, второй вход которого соединен с выходом седьмого блока 24 вычитания, выход второго блока 19 вычитания подключен к первому входу третьего блока 20 вычитания, второй вход которого соединен с выходом четвертого блока 21 вычитания, выход шестого блока 23 вычитания подключен к первому входу второго блока 18 перемножения, выход которого соединен с первым входом третьего сумматора 15, выход третьего блока 20 вычитания подключен ко второму входу третьего сумматора 15, выход которого соединен с первым входом блока 16 деления, второй вход которого соединен с выходом первого блока 17 вычитания, выход блока 16 деления подключен ко вторым входам первого блока 14 перемножения и второго сумматора 13, выход которого является первым выходом первого блока 5 оценивания плановых координат и первым выходом устройства, выход первого блока 14 перемножения подключен ко второму входу первого сумматора 12, выход которого является вторым выходом первого блока 5 оценивания плановых координат и вторым выходом устройства, первый и второй выходы второго блока 9 оценивания плановых координат являются соответственно третьим и четвертым выходами устройства, первый, второй и третий входы первого блока 4 памяти являются соответственно первым, вторым и третьим входами устройства, первый, второй и третий входы второго блока 11 памяти являются соответственно четвертым, пятым и шестым входами устройства.
Устройство для радионавигационного определения плановых координат двух потребителей информации КНС работает следующим образом.
Радионавигационные сигналы, формируемые блоками 1, 2 и 3 бортовой аппаратуры НКА, принимаются и обрабатываются блоками 6 и 10 НАП. Результаты обработки являются по первым и вторым выходам блоков 6 и 10 НАП цифровые коды оценок плановых координат, по первым выходам - оценок  и
и  первого и второго потребителей, а по вторым выходам - оценок
первого и второго потребителей, а по вторым выходам - оценок  и
и  . По третьим выходам блоков 6 и 10 НАП одновременно с цифровыми кодами оценок координат выдаются импульсы, разрешающие выдачу с блоков 4 и 11 памяти цифровых кодов оценок координат начальных точек участков дорог, на которых располагаются потребители, а также цифровых кодов оценок соответствующих коэффициентов участков дорог. По первым выходам блоков 4 и 11 выдаются соответственно коды оценок
. По третьим выходам блоков 6 и 10 НАП одновременно с цифровыми кодами оценок координат выдаются импульсы, разрешающие выдачу с блоков 4 и 11 памяти цифровых кодов оценок координат начальных точек участков дорог, на которых располагаются потребители, а также цифровых кодов оценок соответствующих коэффициентов участков дорог. По первым выходам блоков 4 и 11 выдаются соответственно коды оценок  и
и  по вторым выходам - оценок
по вторым выходам - оценок  и
и  , по третьим выходам - оценок
, по третьим выходам - оценок  и
и  . Цифровые коды с выходов первого блока 6 НАП и первого блока 4 памяти, относящихся к первому потребителю, поступают в первый блок 5 оценивания плановых координат первого потребителя и первый приемопередатчик 7, с помощью которого они подаются во второй блок 9 оценивания плановых координат второго потребителя. Аналогично, цифровые коды с выходов второго блока 10 НАП и второго блока 11 памяти, относящиеся ко второму потребителю, поступают во второй блок 9 оценивания плановых координат второго потребителя и второй приемопередатчик 8, с помощью которого они подаются в первый блок 5 оценивания плановых координат первого потребителя. Таким образом потребители обмениваются между собой информацией о результатах предварительных навигационных определений, полученных их навигационной аппаратурой в обычном режиме, а также информацией об участках дорог, на которых они располагаются. Эта информация вводится по первым, вторым и третьим входам блоков 4 и 11 памяти после того, как потребители оказываются на данных участках дорог.
. Цифровые коды с выходов первого блока 6 НАП и первого блока 4 памяти, относящихся к первому потребителю, поступают в первый блок 5 оценивания плановых координат первого потребителя и первый приемопередатчик 7, с помощью которого они подаются во второй блок 9 оценивания плановых координат второго потребителя. Аналогично, цифровые коды с выходов второго блока 10 НАП и второго блока 11 памяти, относящиеся ко второму потребителю, поступают во второй блок 9 оценивания плановых координат второго потребителя и второй приемопередатчик 8, с помощью которого они подаются в первый блок 5 оценивания плановых координат первого потребителя. Таким образом потребители обмениваются между собой информацией о результатах предварительных навигационных определений, полученных их навигационной аппаратурой в обычном режиме, а также информацией об участках дорог, на которых они располагаются. Эта информация вводится по первым, вторым и третьим входам блоков 4 и 11 памяти после того, как потребители оказываются на данных участках дорог.
Полученная навигационная информация используется каждым потребителем для уточнения оценок своих плановых координат. Уточненные оценки плановых координат потребителей формируются в блоках 5 и 9 оценивания плановых координат. Результаты работы устройства в виде цифровых кодов уточненных оценок плановых координат поступают на первые и вторые выходы блоков 5 и 9.
Работа блоков 5 и 9 оценивания плановых координат в составе заявляемого устройства, например блока 5, состоит в следующем. В блоке 5 формируются уточненные оценки плановых координат первого потребителя следующего вида:


Разница оценок  формируется в пятом блоке 22 вычитания, разница оценок
формируется в пятом блоке 22 вычитания, разница оценок  - в седьмом блоке 24 вычитания, разницы оценок
- в седьмом блоке 24 вычитания, разницы оценок  - во втором блоке 19 вычитания, разница оценок
- во втором блоке 19 вычитания, разница оценок  - в четвертом блоке 21 вычитания, разница коэффициентов
- в четвертом блоке 21 вычитания, разница коэффициентов  - в первом блоке 17 вычитания. С помощью шестого блока 23 вычитания и второго блока 18 перемножения формируется слагаемое
- в первом блоке 17 вычитания. С помощью шестого блока 23 вычитания и второго блока 18 перемножения формируется слагаемое  ввыражении (11). Слагаемое
ввыражении (11). Слагаемое  в выражении (11) формируется в третьем блоке 20 вычитания. Формирование слагаемого
в выражении (11) формируется в третьем блоке 20 вычитания. Формирование слагаемого  в выражении (11) производится с помощью третьего сумматора 15 и блока 16 деления. С использованием данного слагаемого формирование уточненной оценки плановой координаты
в выражении (11) производится с помощью третьего сумматора 15 и блока 16 деления. С использованием данного слагаемого формирование уточненной оценки плановой координаты  в соответствии с выражением (11) производится на выходе второго сумматора 13, а формирование уточненной оценки плановой координаты
в соответствии с выражением (11) производится на выходе второго сумматора 13, а формирование уточненной оценки плановой координаты  в соответствии с выражением (12) производится с помощью первого блока 14 перемножения и первого сумматора 12.
в соответствии с выражением (12) производится с помощью первого блока 14 перемножения и первого сумматора 12.
Аналогично работает второй блок 9 оценивания плановых координат, формирующий уточненные оценки плановых координат второго потребителя следующего вида:


При обмене навигационной информацией между потребителями, например при передаче навигационной информации от первого потребителя второму с использованием первого приемопередатчика 7, цифровые коды оценок с выходов первого блока 4 памяти и первого блока 6 НАП поступают на модулятор 25, с помощью которого, а также с помощью передатчика 26 и первой антенны 27 формируется радиосигнал для передачи навигационной информации от первого потребителя. Этот радиосигнал принимается второй антенной 30, приемником 29, демодулируется демодулятором 28 с выделением цифровых кодов оценок первого потребителя, которые подаются во второй блок 9 оценивания плановых координат. Аналогично работает второй приемопередатчик 8.
Синхронность работы компактно расположенных потребителей обеспечивается путем практически одновременного приема радионавигационных сигналов одних и тех же навигационных КА.
Источники информации
1. Сетевые спутниковые радионавигационные системы / B.C.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. /Под ред. B.C.Шебшаевича. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993. 408 с.
2. Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - 2-е изд. Исправ. - М.: ИПРЖР, 1999. 560 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАДИОНАВИГАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И СКОРОСТИ ДВИЖУЩЕГОСЯ ОБЪЕКТА В УСЛОВИЯХ ДЕЙСТВИЯ НЕБЛАГОПРИЯТНОГО ГЕОМЕТРИЧЕСКОГО ФАКТОРА | 2003 |
|
RU2265864C2 |
| УСТРОЙСТВО ДЛЯ РАДИОНАВИГАЦИОННОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖУЩЕГОСЯ ОБЪЕКТА В УСЛОВИЯХ ДЕЙСТВИЯ НЕБЛАГОПРИЯТНОГО ГЕОМЕТРИЧЕСКОГО ФАКТОРА | 2001 |
|
RU2207584C2 |
| Приемник аппаратуры потребителей сигналов глобальных навигационных спутниковых систем, обеспечивающий обнаружение и блокирование ложных навигационных сигналов | 2024 |
|
RU2829323C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ (ГСО) И/ИЛИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСИНХРОННОЙ НАКЛОННОЙ ОРБИТЕ (ГСНО) С ПОМОЩЬЮ ЗЕМНЫХ СТАНЦИЙ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2474845C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЦЕЛОСТНОСТИ СИСТЕМЫ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2550146C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| Устройство для контроля целостности поля навигационных космических аппаратов | 2016 |
|
RU2636386C1 |
| Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех | 2016 |
|
RU2619800C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСТОТЫ И ШКАЛЫ ВРЕМЕНИ УДАЛЕННЫХ ПУНКТОВ | 2015 |
|
RU2585325C1 |
Изобретение относится к радионавигации и может быть использовано для решения задач высокоточного определения плановых координат потребителей информации космических навигационных систем. Техническим результатом является обеспечение высокой точности радионавигационного определения в дифференциальном режиме плановых координат потребителей при их значительном удалении от контрольно-корректирующей станции или при выходе ее из строя по различным причинам. Устройство содержит первый, второй и третий блоки бортовой аппаратуры навигационных космических аппаратов, два блока памяти, два блока оценивания плановых координат, два блока навигационной аппаратуры потребителя и два приемопередатчика. 1 ил.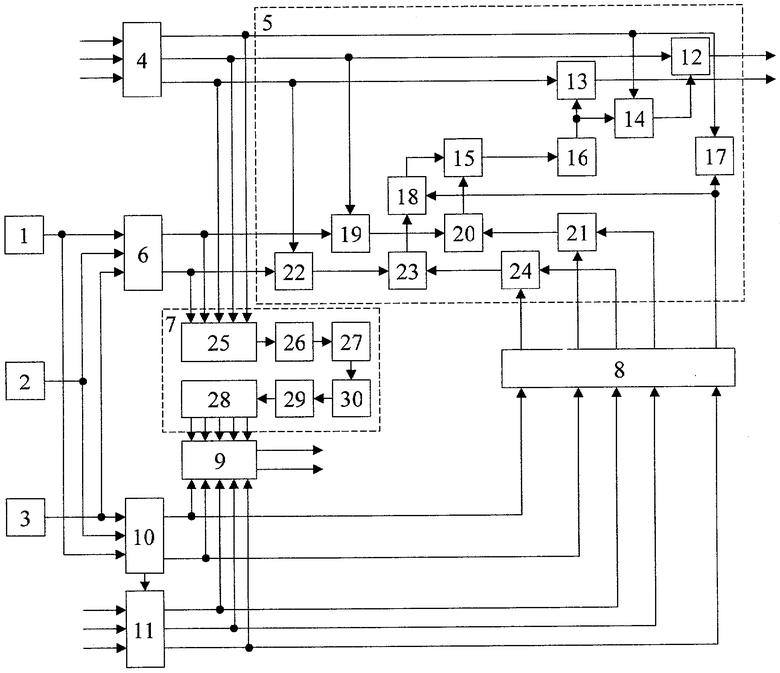
Устройство радионавигационного определения плановых координат потребителей информации космических радионавигационных систем, состоящее из первого, второго и третьего блоков бортовой аппаратуры навигационных космических аппаратов (НКА), первого и второго блоков навигационной аппаратуры потребителя (НАП), первого приемопередающего блока, содержащего модулятор, передатчик, первую, вторую антенны, приемник и демодулятор, причем выходы первого, второго и третьего блоков бортовой аппаратуры НКА подключены соответственно к первым, вторым и третьим входам первого и второго блоков НАП, модулятор соединен через передатчик, первую, вторую антенны и приемник с демодулятором, отличающееся тем, что в него дополнительно введены первый и второй блоки памяти, второй приемопередатчик, первый и второй блоки оценивания плановых координат, содержащие каждый первый, второй, третий, четвертый, пятый, шестой и седьмой блоки вычитания, первый и второй блоки перемножения, первый, второй и третий сумматоры, блок деления, причем первый выход первого блока НАП подключен к первому входу пятого блока вычитания, являющегося первым входом первого блока оценивания плановых координат, а также к первому входу модулятора, являющегося первым входом первого приемопередатчика, второй выход первого блока НАП подключен к первому входу второго блока вычитания, являющегося вторым входом первого блока оценивания плановых координат, а также ко второму входу модулятора, являющегося вторым входом первого приемопередатчика, третий выход первого блока НАП соединен с четвертым входом первого блока памяти, первый выход которого подключен к третьему входу модулятора, являющегося третьим входом первого приемопередатчика, а также к первому входу второго сумматора и второму входу пятого блока вычитания, которые являются третьим входом первого блока оценивания плановых координат, второй выход первого блока памяти подключен к первому входу первого сумматора и второму входу второго блока вычитания, которые являются четвертым входом первого блока оценивания плановых координат, а также к четвертому входу модулятора, являющегося четвертым входом первого приемопередатчика, третий выход первого блока памяти подключен к первому входу первого блока перемножения и первому входу первого блока вычитания, которые являются пятым входом первого блока оценивания плановых координат, а также к пятому входу модулятора, являющегося пятым входом первого приемопередатчика, первый, второй, третий, четвертый и пятый выходы демодулятора, являющиеся соответственно первым, вторым, третьим, четвертым и пятым выходами первого приемопередатчика, подключены соответственно к шестому, седьмому, восьмому, девятому и десятому входам второго блоки оценивания плановых координат, первый выход второго приемопередатчика подключен к первому входу седьмого блока вычитания, являющегося шестым входом первого блока оценивания плановых координат, второй выход второго приемопередатчика подключен к первому входу четвертого блока вычитания, являющегося седьмым входом первого блока оценивания плановых координат, третий выход второго приемопередатчика подключен ко второму входу седьмого блока вычитания, являющегося восьмым входом первого блока оценивания плановых координат, четвертый выход второго приемопередатчика подключен ко второму входу четвертого блока вычитания, являющегося девятым входом первого блока оценивания плановых координат, пятый выход второго приемопередатчика подключен ко второму входу первого блока вычитания и второму входу второго блока перемножения, которые являются десятым входом первого блока оценивания плановых координат, первый и второй выходы второго блока НАП подключены соответственно к первому и второму входам второго блока оценивания плановых координат, а также соответственно к первому и второму входам второго приемопередатчика, третий выход второго блока НАП соединен с четвертым входом второго блока памяти, первый, второй и третий выходы которого подключены соответственно к третьему, четвертому и пятому входам второго блока оценивания плановых координат, а также соответственно к третьему, четвертому и пятому входам второго приемопередатчика, выход пятого блока вычитания подключен к первому входу шестого блока вычитания, второй вход которого соединен с выходом седьмого блока вычитания, выход второго блока вычитания подключен к первому входу третьего блока вычитания, второй вход которого соединен с выходом четвертого блока вычитания, выход шестого блока вычитания подключен к первому входу второго блока перемножения. выход которого соединен с первым входом третьего сумматора, выход третьего блока вычитания подключен ко второму входу третьего сумматора, выход которого соединен с первым входом блока деления, второй вход которого соединен с выходом первого блока вычитания, выход блока деления подключен ко вторым входам первого блока перемножения и второго сумматора, выход которого является первым выходом первого блока оценивания плановых координат и первым выходом устройства, выход первого блока перемножения подключен ко второму входу первого сумматора, выход которого является вторым выходом первого блока оценивания плановых координат и вторым выходом устройства, первый и второй выходы второго блока оценивания плановых координат являются соответственно третьим и четвертым выходами устройства, первый, второй и третий входы первого блока памяти являются соответственно первым, вторым и третьим входами устройства, первый, второй и третий входы второго блока памяти являются соответственно четвертым, пятым и шестым входами устройства.
| ШЕБШАЕВИЧ B.C | |||
| и др., Сетевые спутниковые радионавигационные системы, Москва, Радио и связь, 1993, с.287 | |||
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| US 5644318 A, 01.07.1997 | |||
| US 5467282 А, 14.11.1995. | |||

