Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности наведения за счет компенсации фазовой связи (расфазировки), возникающей при угловом рассогласовании осей измерительной (связанной с определением координат ракеты) и опорной (относительно которой осуществляется измерение угла крена ракеты) систем координат. СН ракеты правильно отрабатывает ошибку в положении ракеты при параллельности осей указанных систем координат. В процессе наведения ракеты на цель может происходить нарушение взаимной ориентации систем координат при наличии расфазировки. Расфазировка ухудшает устойчивость системы, увеличивая колебательность процесса наведения, и приводит к снижению точности наведения и вероятности попадания ракеты в цель.
Известен способ наведения вращающейся ракеты, заключающийся в формировании модулированного лазерного излучения, приеме аппаратурой управления ракеты этого излучения, формировании сигнала, пропорционального координатам ракеты относительно оси луча, формировании сигналов управления посредством преобразования сигналов, пропорциональных координатам ракеты и связанных с лучом лазера, в сигналы в системе координат, связанной с вращающейся ракетой, и преобразовании сигналов управления в отклонения рулей (патент RU №2107879, МПК6 F 41 G 7/00, 7/24, 07.12.94).
СН, реализующая этот способ, включает источник модулированного излучения на пусковой установке и управляемую ракету. Аппаратура управления ракеты принимает модулированное лазерное излучение, вырабатывает сигналы, пропорциональные ее отклонениям относительно центра излучения (оси луча), и формирует команды управления рулями в связанной с вращающейся ракетой системе координат. Отклонения рулей вызывают соответствующие ускорения ракеты и возвращают ее к оси луча.
Недостатком этого способа является отсутствие каких-либо мер, направленных на уменьшение чувствительности СН к расфазировкам.
Наиболее близким к предлагаемому является способ наведения, заключающийся в формировании излучения, приеме аппаратурой управления ракеты этого излучения, формировании сигналов, пропорциональных рассогласованию между ракетой и осью луча в вертикальной и горизонтальной плоскостях, модуляции сигналов рассогласования периодическими по углу крена, сдвинутыми друг относительно друга на угол π/2 опорными сигналами, формировании сигналов управления в связанной с вращающейся ракетой системе координат и преобразовании полученных сигналов управления в отклонения рулевых органов (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: Высшая школа, 1976, с.236-238, рис.7.16).
СН, реализующая этот способ, включает источник излучения (ИИ) на пусковой установке, оптически связанный с ним приемник излучения (ПИ) на ракете, блок формирования вертикальной координаты (БФВК) и блок формирования горизонтальной координаты (БФГК), входы которых соединены с выходом ПИ, первый и второй синусно-косинусные преобразователи (СКП), первые входы которых соединены с датчиком угла крена (ДУК) ракеты, а вторые входы с выходами соответственно БФВК и БФГК, первый и второй суммирующие усилители, первые входы которых соединены с первыми - косинусными выходами соответственно первого и второго СКП, а вторые входы соединены со вторыми - синусными выходами соответственно первого и второго СКП, первый привод рулевого органа (ПРО) и второй ПРО, входы которых соединены соответственно с выходами первого и второго суммирующих усилителей. В качестве СКП в ближайшем аналоге используются синусно-косинусные вращающиеся трансформаторы.
СН работает следующим образом. БФВК и БФГК формируют электрические сигналы, пропорциональные линейным рассогласованиям между ракетой и осью луча в вертикальной h1 (в источнике информации h2) и горизонтальной h2 в источнике информации h1) плоскостях. Модуляция сигналов линейных рассогласований опорными гармоническими сигналами частотой вращения ракеты по крену, сдвинутыми друг относительно друга на угол π/2, осуществляется двумя СКП. Сигналы управления в связанной системе координат имеют вид:
 ;
;
 ,
,
где k - коэффициент пропорциональности БФВК и БФГК;
γ - угол крена ракеты, измеренный датчиком угла крена.
Полученные сигналы u1, u2 поступают на обмотки управления ПРО. Отклонения рулей ПРО возвращают ракету (как объект управления) к оси луча при наличии рассогласований.
Недостатком этого способа также является отсутствие каких-либо мер, направленных на уменьшение чувствительности СП к расфазировкам. Среднее значение априорно известной расфазировки может быть скомпенсировано разворотом на постоянный угол γ0 опорной системы координат, в ближайшем аналоге - разворотом осей обмоток статора синусно-косинусных вращающихся трансформаторов относительно осей вращения рулей (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М., Высшая школа, 1976, с.246). При этом компенсируется расфазировка только определенной величины и одного знака.
Причинами возникновения расфазировок между осями измерительной и опорной систем координат в процессе работы СП являются:
- уход наружной рамки гироскопического ДУК в процессе полета ракеты;
- изменение углового положения измерительной системы координат при стрельбе с движущегося носителя.
Фазовая связь в СН также возникает при угловом рассогласовании исполнительной системы координат (связанной с отработкой команд управления ПРО) относительно опорной системы координат вследствие:
- разброса частоты вращения ракеты по крену относительно номинального значения из-за наличия допусков на элементы конструкции ракеты;
- разброса параметров ПРО, вызывающего разброс времени его срабатывания.
Для большинства рассматриваемых СН возможный диапазон изменения расфазировок априорно известен. Так, например, при стрельбе малогабаритными ПТУР с наземного носителя диапазон изменения его угла крена составляет ±15°, максимальный уход наружной рамки ДУК может достигать ±(5-8)°, разброс фазового запаздывания ПРО относительно среднего значения составляет ±(5-7)°, а суммарная расфазировка в наихудшем сочетании при этом составит ±(25-30)°. Такие расфазировки являются знакопеременными (т.е. возможно наличие углового рассогласования как одного, так и другого знака), что не дает возможности известными способами (компенсация фазовой связи одного знака и определенной величины) снизить чувствительность СН к расфазировкам в процессе полета и улучшить процесс наведения ракет.
Задачей предлагаемого изобретения является повышение точности наведения ракет за счет полной или частичной компенсации возникающих в процессе полета знакопеременных расфазировок, изменяющихся в известных пределах.
Поставленная задача решается за счет того, что по сравнению с известным способом, заключающимся в формировании излучения, приеме аппаратурой управления ракеты этого излучения, формировании сигналов, пропорциональных рассогласованию между ракетой и осью луча в вертикальной и горизонтальной плоскостях, модуляции сигналов рассогласования периодическими по углу крена, сдвинутыми друг относительно друга на угол π/2 опорными сигналами, формировании сигналов управления в связанной с вращающейся ракетой системе координат и преобразовании полученных сигналов управления в отклонения рулевых органов, в предлагаемом способе перед модуляцией сигнал, пропорциональный рассогласованию между ракетой и осью луча в вертикальной плоскости, усиленный с коэффициентом k1, суммируют с сигналом, пропорциональным рассогласованию между ракетой и осью луча в горизонтальной плоскости, ослабленным с коэффициентом k2, а сигнал, пропорциональный рассогласованию между ракетой и осью луча в горизонтальной плоскости, усиленный с коэффициентом k1, суммируют с сигналом, пропорциональным рассогласованию между ракетой и осью луча в вертикальной плоскости, ослабленным с коэффициентом k2, причем коэффициенты k1, k2 устанавливают по зависимостям:


где Δ - угловое рассогласование между осями измерительной системы координат, связанной с определением сигналов рассогласования, и опорной системы координат, относительно которой измеряется угол крена, а диапазон изменения величины Δ ограничивают в пределах ±30°.
В СН вращающейся ракеты, реализующую этот способ, по сравнению с известной СН, включающей ИИ на пусковой установке, оптически связанный с ним ПИ, БФВК и БФГК, входы которых соединены с выходом ПИ, первый и второй СКП, первые входы которых соединены с ДУК ракеты, первый и второй суммирующие усилители, первые входы которых соединены с первыми - косинусными выходами соответственно первого и второго СКП, а вторые входы соединены со вторыми - синусными выходами соответственно второго и первого СКП, первый и второй ПРО, входы которых соединены с выходами соответственно первого и второго суммирующих усилителей, введены третий и четвертый суммирующие усилители, первые входы которых соединены с выходами соответственно БФВК и БФГК, вторые входы соединены с выходами соответственно БФГК и БФВК, а выходы соединены со вторыми входами соответственно первого и второго СКП, причем коэффициенты усиления третьего и четвертого суммирующих усилителей равны между собой по своим первым входам и равны между собой по своим вторым входам.
Отличительной особенностью предлагаемого способа и реализующего его устройства является формирование команды управления в каждом из каналов (вертикальном или горизонтальном) пропорционально рассогласованию не только в "своем" канале, но и в "чужом", причем рассогласование "своего" канала усиливается, а "чужого" - ослабляется.
Дополнительные операции усиления (ослабления) сигналов, пропорциональных рассогласованию между ракетой и осью луча в вертикальной и горизонтальной плоскостях, и их суммирования эквивалентны введению в СН симметричной перекрестной связи (СПС) между каналами с коэффициентами передачи k1 в прямых цепях и k2 в перекрестных цепях.
Для определения потребных коэффициентов k1 и k2 СПС рассматривается структурная схема СН ракеты с использованием передаточных функций (ПФ) ее элементов. Она представлена на фиг.1, где приняты следующие обозначения:
WБфк(p), WПРО(р), Wркз(р) - ПФ блоков формирования координаты (БФВК, БФГК), ПРО, ракеты и кинематического звена соответственно;
 - оператор дифференцирования по времени;
- оператор дифференцирования по времени;
x1, x2 - входные сигналы СН (координаты положения оси луча) соответственно в вертикальной и горизонтальной плоскостях;
y1, y2 - выходные сигналы СН (координаты ракеты) соответственно в вертикальной и горизонтальной плоскостях;
γ0 - априорно известное значение средней величины расфазировки в СН (например, номинальное значение фазового запаздывания ПРО).
Для разомкнутой СН при наличии расфазировки Δ и компенсации фазового запаздывания ПРО углом упреждения γ0 ПФ имеет вид:

где W0(p)=WБФК(p)WПРО(P)WРКЗ(p);  .
.
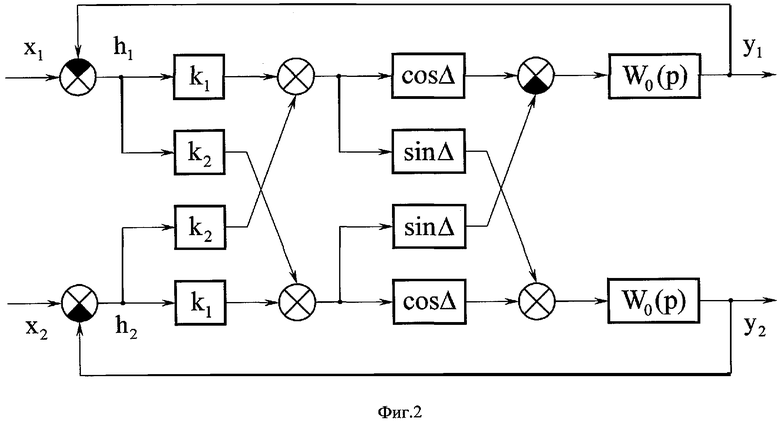
Приведенная структурная схема СН согласно (1) с учетом наличия СПС с коэффициентами k1 и k2 между вертикальным и горизонтальным каналами представлена на фиг.2. Связь между комплексной выходной координатой  и комплексной входной координатой
и комплексной входной координатой  в соответствии с фиг.2 может быть представлена в виде:
в соответствии с фиг.2 может быть представлена в виде:

где 
 - ПФ СН по координате
- ПФ СН по координате  и по комплексно-сопряженной ей координате
и по комплексно-сопряженной ей координате  (здесь и далее комплексное сопряжение обозначено верхним индексом "*"), в которых
(здесь и далее комплексное сопряжение обозначено верхним индексом "*"), в которых  ;
;  ;
;  .
.
Устойчивость такой СН определяется единым характеристическим уравнением (Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972, с.106, 107, 135)
D(p)=0,
которое для рассматриваемого случая запишется в виде:

При отсутствии расфазировки (Δ=0) и СПС (k1=1, k2=0) характеристическое уравнение (2) принимает вид:

Очевидно, что при одновременном выполнении условий


система с СПС между каналами при наличии расфазировки Δ будет иметь характеристическое уравнение вида (3) и степень устойчивости этой системы останется такой же, как и для системы при отсутствии фазовой связи, т.е. введение в СН СПС исключает влияние расфазировки на устойчивость системы. Совместное решение уравнений (4) и (5) позволяет найти значения коэффициентов k1 и k2, обеспечивающих точную компенсацию фазовой связи величиной Δ любого знака:

Например, при необходимости компенсации фазовой связи величиной как +15°, так и -15° значения коэффициентов должны устанавливаться равными 1,04 и 0,27.
Структура предлагаемой СН пояснена на фиг.3, где представлены соединенные оптической связью ИИ 1 и ПИ 2 (все остальные связи - электрические), БФВК 3 и БФГК 4, входы которых соединены с выходом ПИ 2, первый СКП (СКП1) 7 и второй СКП (СКП2) 8, первые входы которых соединены с ДУК 9, первый суммирующий усилитель СУ1 10 и второй суммирующий усилитель СУ2 11, первые входы которых соединены с первыми - косинусными выходами соответственно СКП1 7 и СКП2 8, а вторые входы соединены со вторыми - синусными выходами соответственно СКП2 8 и СКП1 7, первый привод рулевого органа ПРO1 12 и второй привод рулевого органа ПРO2 13, входы которых соединены с выходами соответственно СУ1 10 и СУ2 11, а также третий суммирующий усилитель СУЗ 5 и четвертый суммирующий усилитель СУ 4 6, первые входы которых соединены с выходами соответственно БФВК 3 и БФГК 4, вторые входы соединены с выходами соответственно БФГК 4 и БФВК 3, а выходы соединены со вторыми входами соответственно СКП1 7 и СКП2 8.
В качестве суммирующего усилителя может быть использована схема, представленная в книге Тетельбаума И.М., Шнейдера Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978, с.24.
В качестве остальных элементов могут быть использованы устройства, представленные в ближайшем аналоге.
Наиболее простым вариантом реализации в СН предлагаемого способа является введение в бортовую аппаратуру ракеты СПС между каналами с постоянными коэффициентами передачи согласно (6) при априорном определении величины компенсируемой расфазировки Δ. Эти коэффициенты передачи устанавливают на третьем суммирующем усилителе СУ3 5 и четвертом суммирующем усилителе СУ4 6 (k1 - по их первым входам, a k2 - по их вторым входам).
При наличии на носителе датчика его угла крена и возможности передачи информации об измеряемом угле крена на ракету (или, например, при наличии на борту ракеты устройств измерения времени запаздывания ПРО и частоты вращения по крену) возможны непрерывное определение переменной по полету расфазировки и, соответственно, сигналов k1, k2, модуляция ими сигналов рассогласования в вертикальной и горизонтальной плоскостях.
Ограничение величины компенсируемой расфазировки Δ (а соответственно, и величин коэффициентов k1, k2) в пределах ±30° определяется исходя из максимально возможных ее реальных значений в СН. Как указано выше, в наихудшем случае суммарная расфазировка не превышает ±30°.
Введение в предлагаемом способе дополнительных операций усиления сигналов в прямых цепях и ослабления сигналов в перекрестных цепях и их суммирования не приводит к ухудшению качества процессов наведения в СН при появлении расфазировок величиной больше или меньше выбранной для компенсации (в том числе, и при отсутствии расфазировок вообще) по сравнению с известным способом.
Применение предлагаемого способа наведения вращающейся по углу крена ракеты позволяет повысить точность наведения в условиях наличия расфазировок в СН любого знака, независимо от причин их возникновения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2284001C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540483C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2004 |
|
RU2274817C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548687C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2009 |
|
RU2402743C1 |
| СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2002 |
|
RU2234671C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2005 |
|
RU2282816C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |

Изобретение относится к области разработки СН ракет и может быть использовано в комплексах противотанковых и зенитных управляемых ракет. Технический результат - повышение точности стрельбы вращающимися по углу крена ракетами. Сущность изобретения заключается в компенсации знакопеременных расфазировок за счет формирования команд управления в вертикальном канале - пропорционально не только вертикальному, но и горизонтальному отклонениям ракеты, а в горизонтальном канале - пропорционально не только горизонтальному, но и вертикальному отклонениям. Способ заключается в формировании излучения, приеме аппаратурой управления ракеты этого излучения, формировании сигналов, пропорциональных рассогласованию между ракетой и осью луча в вертикальной и горизонтальной плоскостях, модуляции сигналов рассогласования периодическими по углу крена, сдвинутыми друг относительно друга на угол π/2 опорными сигналами, формировании сигналов управления в связанной с вращающейся ракетой системе координат и преобразовании полученных сигналов управления в отклонения рулевых органов. Перед модуляцией сигнал, пропорциональный рассогласованию между ракетой и осью луча в вертикальной плоскости, усиленный с коэффициентом k1, суммируют с сигналом, пропорциональным рассогласованию между ракетой и осью луча в горизонтальной плоскости, ослабленным с коэффициентом k2, а сигнал, пропорциональный рассогласованию между ракетой и осью луча в горизонтальной плоскости, усиленный с коэффициентом k1, суммируют с сигналом, пропорциональным рассогласованию между ракетой и осью луча в вертикальной плоскости, ослабленным с коэффициентом k2, причем коэффициенты k1, k2 вычисляют по заданным математическим зависимостям. 2 н.п. ф-лы, 3 ил.


где Δ - угловое рассогласование между осями измерительной системы координат, связанной с определением сигналов рассогласования, и опорной системы координат, относительно которой измеряется угол крена, а диапазон изменения величины Δ ограничивают в пределах ±30°.
| КУЗОВКОВ Н.Т | |||
| Системы стабилизации летательных аппаратов | |||
| - М.: Высшая школа, 1976, с.236-238, рис.7.16 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

