Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности наведения ракет.
Известна СН ракеты ([1], с.221), включающая формирователь сигналов рассогласования (ФСР) (луч на пусковой установке и приемник на ракете), автопилот и привод рулевых органов (ПРО). Наведение ракеты на цель осуществляется по лучу. Приемник ракеты принимает излучение и вырабатывает сигнал, соответствующий ее отклонению от оси луча. Сформированный сигнал поступает на автопилот, вырабатывающий сигнал управления приводом, который отклоняет рули ракеты, возвращая ее к центру луча.
Наиболее близкой к предлагаемой является СН вращающейся ракеты ([1], с.237, 238, рис.7.16), которая включает ФСР между ракетой и осью луча (луч - приемник) в вертикальной и горизонтальной плоскостях, синусно-косинусный вращающийся трансформатор (СКВТ), гироскоп крена (ГК) и ПРО.
Сигналы Uy,z с приемника ракеты, пропорциональные ее отклонениям hy,z от оси луча в вертикальной (у) и горизонтальной (z) плоскостях декартовой системы координат, поступают на роторы двух СКВТ, связанные с осью наружной рамки ГК, направленной по продольной оси ракеты. Статоры СКВТ связаны с корпусом ракеты и вращаются вместе с ней относительно неподвижных роторов. Угол поворота статора относительно ротора СКВТ равен углу γ крена ракеты, отсчитываемого от вертикального направления. В результате осуществляется модуляция сигналов Uy,z периодическими сигналами cosγ, sinγ с частотой  , равной частоте вращения ракеты по углу крена. Указанная модуляция преобразует сигналы Uy,z из системы координат, связанной с лучом, в сигналы во вращающейся системе координат, связанной с ракетой.
, равной частоте вращения ракеты по углу крена. Указанная модуляция преобразует сигналы Uy,z из системы координат, связанной с лучом, в сигналы во вращающейся системе координат, связанной с ракетой.
Структурно рассматриваемая СН представляет собой два модулятора, первые входы которых соединены с выходами формирователей сигнала рассогласования, а вторые входы соединены с выходами датчика угла γ крена (ГК), причем сигналы с этих выходов периодические, сдвинутые друг относительно друга на угол π/2, а также суммирующий усилитель, на входы которого поступают сигналы с выходов модуляторов, и последовательно соединенный с ним ПРО.
В одноканальной вращающейся ракете (ракета имеет один руль ([1], с.260, 261) на ПРО поступает сигнал V=Uycosγ+Uzsinγ.
Отрабатывая этот сигнал, ПРО вносит фазовое запаздывание, определяемое по зависимости ([1], с.258):

где τрп(t) - временное запаздывание ПРО;
t - полетное время.
С учетом изменения в процессе полета баллистических и аэродинамических характеристик ракеты фазовое запаздывание ПРО, в общем случае, является переменным. Его средняя величина обычно компенсируется посредством введения упреждения на соответствующую величину - угол фазирования, например, в прототипе - разворотом на постоянный угол осей обмоток статора относительно осей вращения рулей ([1], с.246).
Недостатком данного устройства является отсутствие точной компенсации запаздывания ПРО, в особенности при разбросе частоты вращения ракеты по крену относительно номинального значения, что приводит к возникновению в СН фазовой погрешности - рассогласования между системами координат (связанной с лучом и связанной с ракетой), наличие которого снижает вероятность попадания ракеты в цель [2].
Задачей предлагаемого изобретения является повышение точности наведения за счет более точной компенсации фазового запаздывания ПРО. В соответствии с зависимостью (1) необходимо учесть изменение в процессе полета ракеты:
временного запаздывания ПРО;
частоты (или периода) вращения ракеты по крену, которое существенно зависит от условий стрельбы.
Поставленная задача решается за счет введения в известное устройство между ФСР и модуляторами (первым и вторым) фазовращателя, управляемого сигналом с датчика угла крена, включающего измеритель периода, вход которого соединен с первым выходом датчика угла крена, блок деления, вход делимого которого соединен с источником программно-временного сигнала (функции временного запаздывания ПРО), а вход делителя соединен с выходом измерителя периода, нелинейные преобразователи функции “косинус” и функции “синус”, входы которых соединены с выходом блока деления, третий и четвертый модуляторы, первые входы которых соединены с выходами формирователей сигнала рассогласования соответственно в вертикальной и горизонтальной плоскостях, а вторые входы соединены с выходом нелинейного преобразователя функции “косинус”, пятый и шестой модуляторы, первые входы которых соединены с выходами формирователей сигнала рассогласования соответственно в горизонтальной и вертикальной плоскостях, а вторые входы соединены с выходом нелинейного преобразователя функции “синус”, инвертирующий усилитель, вход которого соединен с выходом пятого модулятора, а также второй и третий суммирующие усилители, первые входы которых соединены с выходами соответственно третьего и четвертого модуляторов, вторые входы соединены с выходами соответственно инвертирующего усилителя и шестого модулятора, а выходы соединены со входами соответственно первого и второго модуляторов.
Управляемый фазовращатель осуществляет разворот вектора сигналов координат на угол фазирования ϕk(t), равный по величине и обратный по знаку фазовому запаздыванию ПРО:

или
где T(t) - период вращения ракеты по крену.
Угол разворота ϕk(t) определяется в соответствии с зависимостью (2) по измеренному значению периода вращения ракеты по крену и априорно заданной функции времени запаздывания ПРО.
Сигналы Uky,kz на выходе управляемого фазовращателя имеют вид
а сигнал V=Ukycosγ+Ukzsinγ, поступающий на ПРО, формируется с необходимым фазовым опережением.
Преимуществом предлагаемой СН является компенсация фазового запаздывания ПРО в зависимости от текущего значения периода (частоты) вращения ракеты по крену, что позволяет отслеживать его изменение в течение полета.
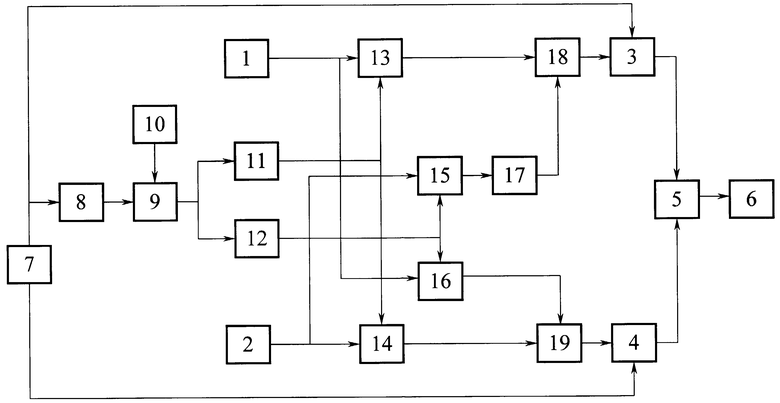
Структура предлагаемой СН пояснена чертежом, где представлены последовательно соединенные формирователь сигнала рассогласования между ракетой и осью луча в вертикальной плоскости 1, третий модулятор 13, второй суммирующий усилитель 18, первый модулятор 3, первый суммирующий усилитель 5 и привод рулевого органа 6, а также последовательно соединенные формирователь сигнала рассогласования между ракетой и осью луча в горизонтальной плоскости 2, четвертый модулятор 14, третий суммирующий усилитель 19 и второй модулятор 4, выход которого соединен со вторым входом суммирующего усилителя 5, а также датчик угла крена 7 ракеты, первый и второй выходы которого соединены со вторыми входами соответственно первого 3 и второго 4 модулятора, причем сигналы с первого и второго выходов датчика угла крена являются периодическими, сдвинутыми друг относительно друга на угол π/2, а также измеритель периода 8, вход которого соединен с первым выходом датчика угла крена 7, блок деления 9, вход делимого которого соединен с источником программно-временного сигнала 10, а вход делителя соединен с выходом измерителя периода 8, нелинейные преобразователи функции “косинус” 11 и функции “синус” 12, входы которых соединены с выходом блока деления 9, а выход нелинейного преобразователя функции “косинус” 11 соединен со вторыми входами третьего 13 и четвертого 14 модуляторов, пятый 15 и шестой 16 модуляторы, первые входы которых соединены с выходами формирователей сигнала рассогласования соответственно в горизонтальной 2 и вертикальной 1 плоскостях, вторые входы соединены с выходом нелинейного преобразователя функции “синус” 12, а выход шестого модулятора 16 соединен со вторым входом третьего суммирующего усилителя 19, и инвертирующий усилитель 17, вход которого соединен с выходом пятого модулятора 15, а выход соединен со вторым входом второго суммирующего усилителя 18.
Устройство работает следующим образом.
Сигнал, пропорциональный значению τрп(t), с выхода источника программно-временного сигнала 10 делится блоком деления 9 на сигнал, пропорциональный значению T(t), с выхода измерителя периода 8 вращения ракеты по углу крена, в результате чего образуется сигнал, определяющий потребный угол фазирования ϕk(t).
Сигналы с выходов ФСР 1, 2 поступают на управляемый фазовращатель, включающий третий 13, четвертый 14, пятый 15 и шестой 16 модуляторы, инвертирующий усилитель 17, второй 18 и третий 19 суммирующие усилители, а также нелинейные преобразователи функции “косинус” 11 и функции “синус” 12, регулируемые сигналом ϕk(t). В результате преобразования сигналов по зависимости (3) вектор сигналов координат разворачивается на угол ϕk(t).
Скорректированные сигналы координат, как и в прототипе, модулируются на первом 3 и втором 4 модуляторах сигналами с датчика угла крена 7, преобразуясь в сигналы во вращающейся системе координат, связанной с ракетой, суммируются на первом суммирующем усилителе 5, и далее сформированный сигнал управления поступает на ПРО 6.
В качестве формирователя сигнала рассогласования может быть использовано устройство, включающее радиолокационную станцию и приемник ракеты, представленное в [1] на с.221.
В качестве суммирующего усилителя, модулятора и блока деления, нелинейных преобразователей функций “косинус” и “синус” могут быть использованы схемы, представленные в [3] соответственно на с.24, 53, 82.
В качестве датчика периодического по углу крена сигнала может быть использовано устройство, представленное в [1] на с.237, 238, рис. 7.16.
В качестве измерителя периода может быть использован преобразователь КР1108ПП1, представленный в [4] на с.90, рис.56.
В качестве источника программно-временного сигнала может быть использована схема, представленная в [5] на с. 157.
Применение предлагаемой СН для вращающихся по углу крена ракет позволяет повысить точность их наведения за счет формирования сигнала управления с компенсацией фазового запаздывания ПРО, учитывающей изменение частоты вращения по крену в процессе полета.
Сравнение заявляемого технического решения с прототипом позволило установить соответствие его критерию “новизна”. При изучении других известных технических решений в данной области признаки, отличающие заявляемое изобретение от прототипа, не были выявлены, и поэтому они обеспечивают заявляемому техническому решению соответствие критерию “изобретательский уровень”.
Источники информации
1. Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). - М.: Высшая школа, 1976.
2. Красовский А.А. О двухканальных системах автоматического регулирования с антисимметричными связями. - Автоматика и телемеханика, т. №2, 1957.
3. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978.
4. Массовая библиотека инженера "Электроника", В/К 41.
5. У. Титце, К. Шенк. Полупроводниковая схемотехника. М.: Мир, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2004 |
|
RU2274817C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548687C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540483C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2009 |
|
RU2402743C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2294515C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР. Технический результат - повышение точности наведения вращающихся по углу крена ракет с изменяющимися в процессе полета баллистическими и аэродинамическими характеристиками за счет формирования сигнала управления ракетой с учетом компенсации фазового запаздывания привода рулевых органов (ПРО) в зависимости от текущего значения периода (частоты) вращения ракеты по крену и априорно заданной функции временного запаздывания ПРО. В известную СН вращающейся ракеты, включающую формирователи сигналов рассогласования между ракетой и осью луча в вертикальной и горизонтальной плоскостях, выходы которых соединены соответственно с первыми входами первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, привод рулевого органа, вход которого соединен с выходом суммирующего усилителя, и датчик угла крена ракеты, первый и второй выходы которого соединены со вторыми входами соответственно первого модулятора и второго модулятора, причем сигналы с первого и второго выходов датчика угла крена являются периодическими, сдвинутыми друг относительно друга на угол π/2, введены измеритель периода, вход которого соединен с первым выходом датчика угла крена, блок деления, вход делимого которого соединен с источником программно-временного сигнала (функции временного запаздывания ПРО). Вход делителя блока деления соединен с выходом измерителя периода. Входы нелинейных преобразователей функции "косинус" и функции "синус" соединены с выходом блока деления. Система содержит также третий и четвертый модуляторы, первые входы которых соединены с выходами формирователей сигнала рассогласования соответственно в вертикальной и горизонтальной плоскостях, а вторые входы соединены с выходом нелинейного преобразователя функции "косинус". Система содержит пятый и шестой модуляторы, первые входы которых соединены с выходами формирователей сигнала рассогласования соответственно в горизонтальной и вертикальной плоскостях, а вторые входы соединены с выходом нелинейного преобразователя функции "синус". Система содержит инвертирующий усилитель, вход которого соединен с выходом пятого модулятора. Введены также второй и третий суммирующие усилители, первые входы которых соединены с выходами соответственно третьего и четвертого модуляторов, вторые входы соединены с выходами соответственно инвертирующего усилителя и шестого модулятора, а выходы соединены со входами соответственно первого и второго модуляторов. Компенсация фазового запаздывания ПРО в соответствии с изменением частоты вращения ракеты по крену в процессе полета позволяет повысить точность наведения ракет. 1 ил.
Система наведения вращающейся ракеты, содержащая формирователи сигналов рассогласования между ракетой и осью луча в вертикальной и горизонтальной плоскостях, первый и второй модуляторы, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, привод рулевого органа, вход которого соединен с выходом суммирующего усилителя, и датчик угла крена ракеты, первый и второй выходы которого соединены со вторыми входами соответственно первого модулятора и второго модулятора, причем сигналы с первого и второго выходов датчика угла крена являются периодическими, сдвинутыми друг относительно друга на угол π/2, отличающаяся тем, что в нее введены измеритель периода, вход которого соединен с первым выходом датчика угла крена, блок деления, вход делимого которого соединен с источником программно-временного сигнала, а вход делителя соединен с выходом измерителя периода, нелинейные преобразователи функции "косинус" и функции "синус", входы которых соединены с выходом блока деления, третий и четвертый модуляторы, первые входы которых соединены с выходами формирователей сигнала рассогласования соответственно в вертикальной и горизонтальной плоскостях, а вторые входы соединены с выходом нелинейного преобразователя функции "косинус", пятый и шестой модуляторы, первые входы которых соединены с выходами формирователей сигнала рассогласования соответственно в горизонтальной и вертикальной плоскостях, а вторые входы соединены с выходом нелинейного преобразователя функции "синус", инвертирующий усилитель, вход которого соединен с выходом пятого модулятора, а также второй и третий суммирующие усилители, первые входы которых соединены с выходами соответственно третьего и четвертого модуляторов, вторые входы соединены с выходами соответственно инвертирующего усилителя и шестого модулятора, а выходы соединены со входами соответственно первого и второго модуляторов.
| КУЗОВКОВ H.T | |||
| Системы стабилизации летательных аппаратов (баллистических и зенитных ракет) | |||
| - М.: Высшая школа, 1976, с.237 и 238 | |||
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| US 4111385, 05.09.1978 | |||
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| Станция орбитальная заправочная криогенная | 2019 |
|
RU2729748C1 |

