Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности их наведения.
Известен способ наведения вращающейся ракеты, заключающийся в формировании модулированного лазерного излучения, приеме аппаратурой управления ракеты этого излучения, формировании сигнала, пропорционального координатам ракеты относительно оси луча, формировании сигналов управления посредством преобразования сигналов, пропорциональных координатам ракеты и связанных с лучом лазера, в систему координат, связанную с вращающейся ракетой, и преобразовании сигналов управления в отклонение рулей (патент RU №2107879, МПК6 F 41 G 7/00, 7/24, 07.12.94).
СН, реализующая этот способ, включает источник модулированного излучения на пусковой установке и управляемую ракету. Аппаратура управления ракеты принимает модулированное лазерное излучение, вырабатывает сигналы, пропорциональные ее отклонениям относительно центра излучения (оси луча), и формирует команды управления рулями в связанной с вращающейся ракетой системе координат. Отклонения рулей возвращают ракету к оси луча.
Недостатком этого способа является то, что формируемые сигналы пропорциональны только отклонениям ракеты, а необходимые для наведения (выхода ракеты на ось луча) сигналы, пропорциональные скорости изменения (производной) этих отклонений, отсутствуют.
Наиболее близким к предлагаемому является способ наведения вращающейся ракеты, включающий формирование излучения в форме луча на пусковой установке, прием излучения на ракете и формирование сигнала рассогласования между положением ракеты и осью луча, суммирование сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляцию суммарного сигнала периодическим по углу крена сигналом и преобразование полученного сигнала в отклонение рулей ракеты (патент RU №2219473, МПК7 F 41 G 7/24, F 42 В 15/01, 13.05.02).
СН, реализующая этот способ, включает формирователь сигнала рассогласования (ФСР) между ракетой и осью луча, состоящий из последовательно соединенных источника модулированного излучения, приемника излучения и блока выработки сигнала рассогласования, звено с регулируемым временем запаздывания, первый вход которого соединен с выходом блока выработки сигнала рассогласования, суммирующий усилитель, первый вход которого соединен с выходом звена с регулируемым временем запаздывания, а второй вход соединен с выходом блока выработки сигнала рассогласования, модулятор, первый вход которого соединен с выходом суммирующего усилителя, а второй вход соединен с выходом датчика периодического по углу крена сигнала, привод руля, вход которого соединен с выходом модулятора, измеритель периода, вход которого соединен с выходом датчика периодического по углу крена сигнала, а выход соединен со вторым входом звена запаздывания, по которому осуществляется регулировка времени запаздывания τ.
В известном способе на выходе ФСР формируется сигнал U, пропорциональный отклонению ракеты от оси луча (в вертикальной и горизонтальной плоскостях декартовой системы координат). После суммирования сигнала рассогласования U и сигнала U1, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания τ сигнала рассогласования, результирующий сигнал U∑ в операторной форме имеет вид
U∑(p)=U(p)+U1(p)=U(p)(1+k(l-e-τp))=U(p)(k1e-τp+k2),
где  - оператор дифференцирования по полетному времени t;
- оператор дифференцирования по полетному времени t;
k1, k2 - коэффициенты, причем k1=-k; k2=k+, где k - постоянный коэффициент (значение коэффициента k выбирается 2-5 исходя из необходимости обеспечения устойчивости системы).
При разложении функции е-τp в степенной ряд и пренебрежении членами степеней выше первой сигнал U∑ может быть представлен в виде
U∑(p)=U(p)(kτp+1),
откуда следует, что в известном способе обеспечивается формирование сигнала, пропорционального отклонению ракеты от оси луча и производной отклонения, причем параметры k, τ определяют степень дифференцирования.
Модуляция суммарного сигнала U∑ периодическим по углу крена сигналом преобразует сигнал из системы координат, связанной с лучом, в сигнал во вращающейся системе координат, связанной с ракетой. Полученный сигнал преобразуется в отклонение руля ракеты.
Недостатком данного способа является наличие переходного процесса при появлении или пропадании излучения, связанного с тем, что при скачкообразном изменении входного сигнала любая система с дифференцирующими свойствами имеет большой коэффициент усиления на участке переходного процесса. При чистом дифференцировании этот коэффициент усиления составляет бесконечность, для рассматриваемого способа k+1 в течение времени τ.
Появление или пропадание приема излучения возникает в процессе полета ракеты в следующих случаях:
при встреливании ракеты в луч;
при выходе и возможном дальнейшем входе в луч вследствие наличия каких-либо возмущающих факторов (например, сильного бокового ветра);
при экранировании линии связи луч - ракета (например, элементами рельефа местности).
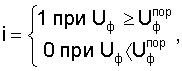
В каждом из этих случаев возникает переходный процесс в системе, ухудшающий точность наведения. На фиг.1 для примера приведены сигналы U1, U∑ при изменении входного сигнала U с учетом появления и пропадания излучения.
При появлении излучения происходит скачкообразное изменение сигнала U в момент времени tвх, и в течение времени переходного процесса, равного времени запаздывания τ, формируется сигнал с коэффициентом усиления k+1, вызывающий команду на руль, действующую в неблагоприятную сторону (с учетом обратной связи в системе управления).
При пропадании излучения в момент времени tвых происходит скачкообразное изменение сигнала рассогласования U (его обнуление), и в течение времени τ также формируется сигнал, вызывающий "паразитную" команду на руль.
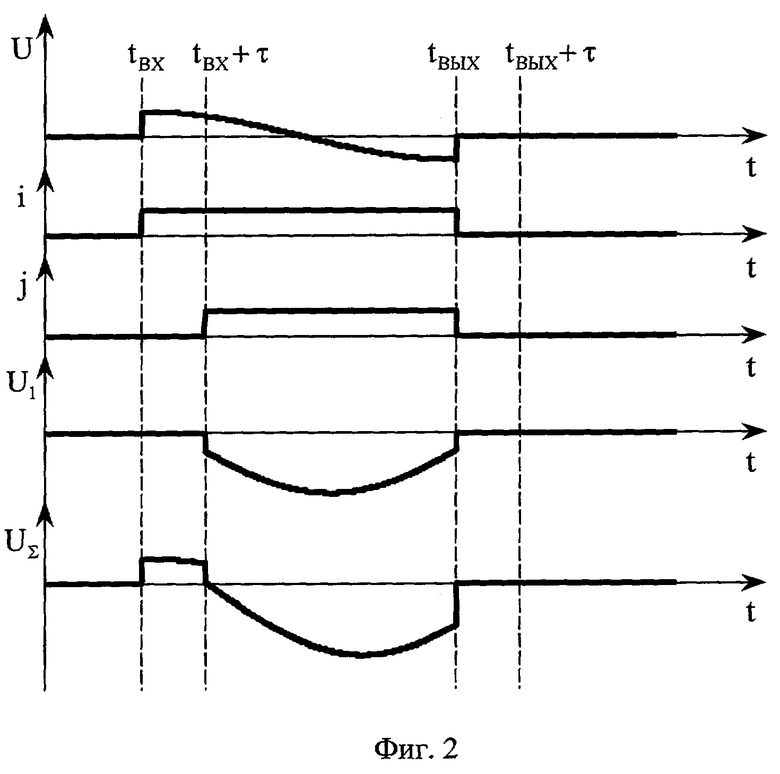
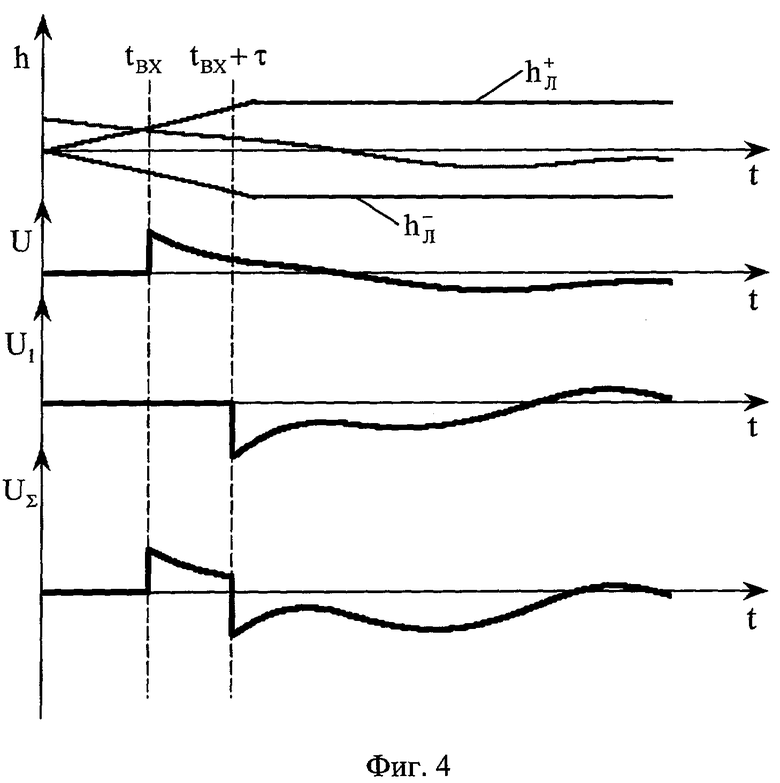
На фиг.3 представлена траектория h встреливания ракеты в расширяющийся луч с границами  и
и  (например, в горизонтальной плоскости при действии бокового ветра) для случая расположения ракеты на пусковой установке с начальным рассогласованием относительно источника излучения. Ракета встреливается в луч слева (момент времени tвх), и в течение времени переходного процесса, равного времени запаздывания τ, сигнал U∑ формирует команду вправо (с учетом обратной связи в системе управления), пропорциональную сигналу U с большим коэффициентом усиления (k+1). Правильное формирование команды начинается с момента времени tвых+τ (под правильным формированием команды понимается оперирование с сигналом рассогласования U, соответствующим истинному отклонению ракеты). "Паразитная" команда на участке переходного процесса приводит к недопустимым увеличениям отклонений ракеты от оси луча вплоть до вероятного выхода из него (на фиг.3 ракета отклоняется до правой границы луча
(например, в горизонтальной плоскости при действии бокового ветра) для случая расположения ракеты на пусковой установке с начальным рассогласованием относительно источника излучения. Ракета встреливается в луч слева (момент времени tвх), и в течение времени переходного процесса, равного времени запаздывания τ, сигнал U∑ формирует команду вправо (с учетом обратной связи в системе управления), пропорциональную сигналу U с большим коэффициентом усиления (k+1). Правильное формирование команды начинается с момента времени tвых+τ (под правильным формированием команды понимается оперирование с сигналом рассогласования U, соответствующим истинному отклонению ракеты). "Паразитная" команда на участке переходного процесса приводит к недопустимым увеличениям отклонений ракеты от оси луча вплоть до вероятного выхода из него (на фиг.3 ракета отклоняется до правой границы луча  ).
).
Физически это означает, что при появлении или пропадании излучения (например, при входе ракеты в луч и при выходе из него) аппаратура управления воспринимает скачкообразное изменение сигнала U как движение ракеты с бесконечно большой поперечной скоростью, вследствие чего формирует команду на руль от производной сигнала отклонения в сторону, противоположную правильному направлению.
Задачей предлагаемого изобретения является обеспечение такого управления ракетой, при котором сохраняется полезное для ее наведения управление по производной отклонения в течение всего полета, за исключением участков переходных процессов после появления или пропадания излучения.
Поставленная задача решается за счет того, что по сравнению с известным способом, включающим формирование излучения в форме луча на пусковой установке, прием излучения на ракете и формирование сигнала рассогласования между положением ракеты и осью луча, суммирование сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляцию суммарного сигнала периодическим по углу крена сигналом и преобразование полученного сигнала в отклонение руля ракеты, в предлагаемом способе при появлении или пропадании приема излучения на ракете в течение времени, равного времени запаздывания τ, отсчитываемого от момента появления или пропадания излучения, модулируют только сигнал рассогласования U, а по истечении этого времени модулируют сумму U∑ сигнала рассогласования U и сигнала U1, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования.
В СН, реализующую этот способ, по сравнению с известной СН, включающей формирователь сигнала рассогласования между ракетой и осью луча, состоящий из последовательно соединенных источника модулированного излучения, приемника излучения и блока выработки сигнала рассогласования, звено с регулируемым временем запаздывания, первый вход которого соединен с выходом блока выработки сигнала рассогласования, суммирующий усилитель, второй вход которого соединен с выходом блока выработки сигнала рассогласования, модулятор, первый вход которого соединен с выходом суммирующего усилителя, а второй вход соединен с выходом датчика периодического по углу крена сигнала, привод руля, вход которого соединен с выходом модулятора, измеритель периода, вход которого соединен с выходом датчика периодического по углу крена сигнала, а выход соединен со вторым входом звена запаздывания, по которому осуществляется регулировка времени запаздывания, введены пороговое устройство, вход которого соединен с выходом приемника излучения, первое логическое устройство между выходом звена с регулируемым временем запаздывания и первым входом суммирующего усилителя, второе логическое устройство между выходом блока выработки сигнала рассогласования и третьим входом суммирующего усилителя, причем вторые входы первого и второго логических устройств соединены с выходом порогового устройства, а их третьи входы соединены с выходом измерителя периода.
Коэффициенты усиления суммирующего усилителя по первому, второму и третьему входу равны соответственно «минус» k, 1, и к (где k=2-5, как и в ближайшем аналоге).
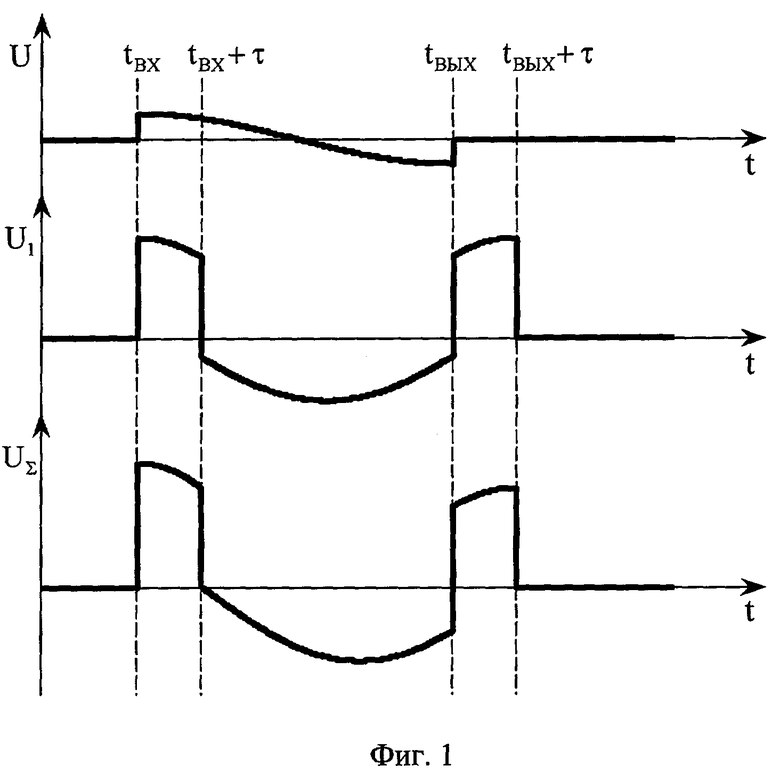
Пороговое устройство формирует сигнал i, характеризующий наличие (i=1) или отсутствие (i=0) сигнала на выходе приемника излучения Uф согласно условию
где  - пороговое значение сигнала Uф, соответствующее наличию излучения (полезного сигнала) на входе приемника излучения.
- пороговое значение сигнала Uф, соответствующее наличию излучения (полезного сигнала) на входе приемника излучения.
Первое и второе логические устройства замыкают (j=1) и размыкают (j=0) цепи согласно условию

где t - текущее полетное время;
tвх - время входа ракеты в луч, определяемое передним фронтом сигнала i (изменением значения i с 0 на 1);
tвых - время выхода ракеты из луча, определяемое задним фронтом сигнала i (изменением значения i с 1 на 0).
На фиг.2 приведены сигналы i, j, U1, U∑ при изменении входного сигнала U с учетом его появления и пропадания в соответствии с предлагаемым изобретением. По сравнению с сигналами, приведенными на фиг.1 для известного способа, в сигнале U1, а соответственно, и в сигнале U∑ отсутствуют "паразитные" команды на участках переходных процессов при появлении и пропадании излучения (т.е. на этих участках осуществляется управление только по отклонению, а на остальном участке наведения - по отклонению и производной отклонения).
На фиг.4 показан положительный эффект от использования предлагаемого изобретения. По сравнению с траекторией, приведенной на фиг.3 для известного способа, максимальное отклонение ракеты h относительно оси луча в тех же условиях уменьшается приблизительно в 2 раза.
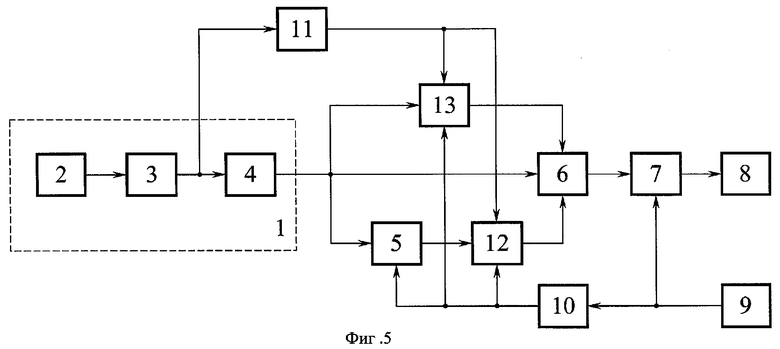
Структура предлагаемой CH пояснена на фиг.5, где представлены формирователь сигнала рассогласования 1 между положением ракеты и осью луча, состоящий из последовательно соединенных источника модулированного излучения 2, приемника излучения 3 и блока выработки сигнала рассогласования 4, пороговое устройство 11, вход которого соединен с выходом приемника излучения 3, звено с регулируемым временем запаздывания 5, первый вход которого соединен с выходом блока выработки сигнала рассогласования 4, первое логическое устройство 12, первый вход которого соединен с выходом звена с регулируемым временем запаздывания 5, второе логическое устройство 13, первый вход которого соединен с выходом блока выработки сигнала рассогласования 4, а вторые входы первого и второго логических устройств соединены с выходом порогового устройства 11, суммирующий усилитель 6, первый, второй и третий входы которого соединены с выходами соответственно первого логического устройства 12, блока выработки сигнала рассогласования 4 и второго логического устройства 13, модулятор 7, первый вход которого соединен с выходом суммирующего усилителя 6, а второй вход соединен с выходом датчика периодического по углу крена сигнала 9, привод руля 8, вход которого соединен с выходом модулятора 7, а также измеритель периода 10, вход которого соединен с выходом датчика периодического по углу крена сигнала 9, а выход соединен со вторым входом звена запаздывания 5 и третьими входами первого логического устройства 12 и второго логического устройства 13.
Устройство работает следующим образом.
Оптический сигнал, вырабатываемый источником модулированного излучения 2 на пусковой установке, поступает на приемник излучения 3 ракеты, электрический сигнал с выхода которого поступает в блок выработки сигнала рассогласования 4, формирующий сигнал, пропорциональный отклонению ракеты от центра модулированного излучения (оси луча).
Сигнал с выхода блока выработки сигнала рассогласования 4 поступает по трем цепям на суммирующий усилитель 6 с различными коэффициентами усиления по своим входам, причем по цепи первого входа сигнал проходит через звено с регулируемым временем запаздывания 5 и первое логическое устройство 12, а по цепи третьего входа сигнал проходит через второе логическое устройство 13.
Сформированный сигнал управления с выхода суммирующего усилителя 6 модулируется опорным сигналом с выхода датчика периодического по углу крена сигнала 9 на модуляторе 7, преобразуясь из системы координат, связанной с лучом во вращающуюся систему координат, связанную с ракетой.
Изменение времени запаздывания звена запаздывания 5 осуществляется по его второму входу, соединенному с измерителем периода 10.
Логические устройства замыкают и размыкают цепи на входе суммирующего усилителя 6 по управляющим сигналам с выхода измерителя периода 10 и порогового устройства 11, вырабатывающего признак нахождения ракеты в луче. При размыкании логическими устройствами цепей первого и третьего входа суммирующего усилителя 6 его выходной сигнал U∑ соответствует выходному сигналу U блока выработки сигнала рассогласования 4. При замыкании логическими устройствами этих цепей выходной сигнал U∑ с суммирующего усилителя 6 формируется как сумма сигнала рассогласования U и сигнала U1, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования. Размыкание цепей происходит в течение времени запаздывания τ после появления и пропадания излучения.
Таким образом, преимуществом предлагаемой CH является обеспечение управления по отклонению и производной отклонения на всем участке полета ракеты кроме интервалов времени, равных времени запаздывания τ после появления и пропадания излучения, где происходит управление только по отклонению.
В качестве порогового устройства и логического устройства могут быть использованы известные схемы (например, Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978, с.112-114).
В качестве остальных элементов, входящих в состав СН, могут быть использованы устройства, представленные в ближайшем аналоге (патент RU №2219473, МПК7 F 41 G 7/24, F 42 В 15/01, 13.05.02).
Применение предлагаемой CH вращающихся по углу крена ракет позволяет повысить точность наведения ракет.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540483C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548687C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2009 |
|
RU2402743C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2294515C1 |
| СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2002 |
|
RU2234671C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ | 2002 |
|
RU2219473C1 |
Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР. Технический результат - повышение точности стрельбы вращающимися по углу крена ракетами, наводимыми по лучу, в условиях появления и пропадания излучения. Сущность изобретения заключается в формировании излучения, формировании сигнала рассогласования между ракетой и осью луча, суммировании сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляции суммарного сигнала периодическим по углу крена сигналом и преобразовании полученного сигнала в отклонение рулей ракеты. При появлении или пропадании излучения в течение времени, равного времени запаздывания, отсчитываемого от момента появления или пропадания излучения, осуществляют модуляцию только сигнала рассогласования, а по истечении этого времени модулируют сумму сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования. В СН, реализующую этот способ, по сравнению с известной СН, включающей формирователь сигнала рассогласования между ракетой и осью луча, состоящий из последовательно соединенных источника модулированного излучения, приемника излучения и блока выработки сигнала рассогласования, звено с регулируемым временем запаздывания, первый вход которого соединен с выходом блока выработки сигнала рассогласования, суммирующий усилитель, первый вход которого соединен с выходом звена с регулируемым временем запаздывания, а второй вход соединен с выходом блока выработки сигнала рассогласования, модулятор, первый вход которого соединен с выходом суммирующего усилителя, а второй вход соединен с выходом датчика периодического по углу крена сигнала, привод руля, вход которого соединен с выходом модулятора, измеритель периода, вход которого соединен с выходом датчика периодического по углу крена сигнала, а выход соединен со вторым входом звена запаздывания, по которому осуществляется регулировка времени запаздывания, введены пороговое устройство, вход которого соединен с выходом приемника излучения, первое логическое устройство между выходом звена с регулируемым временем запаздывания и первым входом суммирующего усилителя, второе логическое устройство между выходом блока выработки сигнала рассогласования и третьим входом суммирующего усилителя, причем вторые входы первого и второго логических устройств соединены с выходом порогового устройства, а их третьи входы соединены с выходом измерителя периода. 2 н.п. ф-лы, 5 ил.
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ | 2002 |
|
RU2219473C1 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

