Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности их наведения на цель.
Известен способ наведения вращающейся ракеты, включающий формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов рассогласования в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты сигналами, суммирование промодулированных сигналов и преобразование полученного сигнала управления в отклонение рулевого органа (патент RU №2234671, МПК7 F42B 15/01, F41G 7/24, 15.12.02).
СН, реализующая этот способ, включает источник излучения (ИИ) на пусковом устройстве, оптически связанный с ним приемник излучения (ПИ), формирователи сигналов рассогласования между ракетой и осью луча в вертикальной и горизонтальной плоскостях, входы которых соединены с выходом приемника излучения, а выходы соединены соответственно с первыми входами первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, привод рулевого органа (ПРО), вход которого соединен с выходом суммирующего усилителя, и датчик угла крена ракеты, первый и второй выходы которого соединены со вторыми входами соответственно первого модулятора и второго модулятора, причем сигналы с первого и второго выходов датчика угла крена являются периодическими, сдвинутыми друг относительно друга на угол π/2.
Недостатком данного способа и устройства, работающего на основе амплитудной модуляции сигналов, является необходимость применения в ракете пропорционального ПРО, при использовании которого отклонения рулей пропорциональны управляющему сигналу. Поскольку пропорциональный ПРО является достаточно сложным электромеханическим устройством, широкое распространение получили наиболее простые релейные двухпозиционные ПРО. Применение рассмотренной СП для управления ракетой с релейным ПРО невозможно без потери точности наведения, поскольку при отсутствии линеаризации релейного ПРО возникают большие погрешности отработки сигнала управления.
Наиболее близким к предлагаемому является способ наведения вращающейся ракеты с релейным ПРО, включающий формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты сигналами, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, по условию n=3, причем  , где ω0 - частота сигнала линеаризации,
, где ω0 - частота сигнала линеаризации,  - частота вращения ракеты по крену, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа (патент RU №2184921, МПК7 F41G 7/00, F42B 15/01, 03.04.00).
- частота вращения ракеты по крену, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа (патент RU №2184921, МПК7 F41G 7/00, F42B 15/01, 03.04.00).
СН, реализующая этот способ, включает ИИ на пусковом устройстве, оптически связанный с ним ПИ, формирователи сигналов управления (ФСУ) в вертикальной и горизонтальной плоскостях, входы которых соединены с выходом ПИ, а выходы которых соединены соответственно с первыми входами первого и второго модуляторов, суммирующий усилитель (СУ), первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, гироскопический датчик угла крена у ракеты (ГДУК), первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов ГДУК являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2, формирователь сигнала линеаризации (ФСЛ), вход которого соединен со вторым выходом ГДУК, логическое устройство (ЛУ), вход которого соединен со вторым выходом ГДУК, третий модулятор, первый вход которого соединен с выходом ФСЛ, второй вход соединен с выходом ЛУ, а выход соединен с третьим входом СУ, двухпозиционный релейный элемент (РЭ), вход которого соединен с выходом СУ, а также ПРО, вход которого соединен с выходом двухпозиционного РЭ.
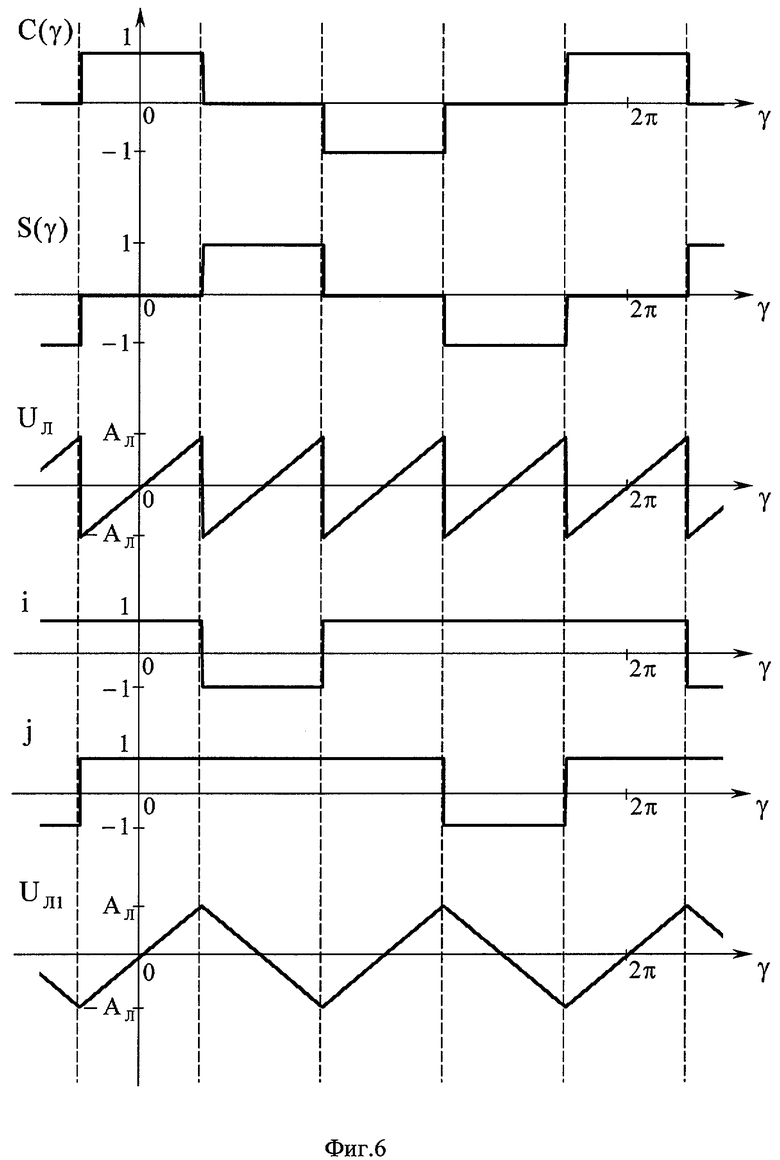
СН работает следующим образом. ПИ на ракете принимает модулированное излучение, формируемое ИИ на пусковом устройстве, из которого ФСУ вырабатывают сигналы линейных рассогласований hy, hz между положением ракеты и осью луча в вертикальной и горизонтальной плоскостях. Эти сигналы преобразуются из измерительной системы координат (СК), ориентированной относительно земли, во вращающуюся, связанную с ракетой СК путем их модуляции релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2 сигналами С(γ), S(γ) с выходов ГДУК. ФСЛ на основе информации с ГДУК реализует на каждом периоде вращения ракеты по углу крена пилообразный сигнал UЛ (синфазный с сигналами С(γ), S(γ) вида:
где АЛ - амплитуда сигнала UЛ.
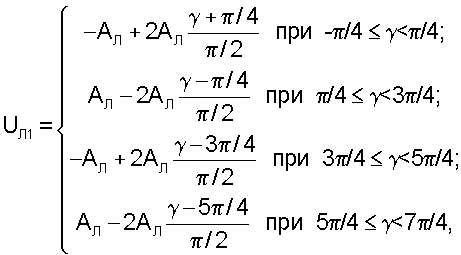
ЛУ обеспечивает инверсию исходного сигнала линеаризации UЛ на четверти оборота вращения ракеты по углу крена согласно зависимости:
Скорректированный сигнал линеаризации UЛ1=iUЛ с выхода третьего модулятора имеет вид:
Вид сигналов С(γ), S(γ), UЛ, i, UЛ1 приведен на фиг.1.
После суммирования промодулированных сигналов рассогласований со скорректированным сигналом линеаризации на СУ и определения знака суммы двухпозиционным РЭ результирующий выходной сигнал

поступающий на одноканальный релейный ПРО ракеты, является двухпозиционным релейным, обеспечивающим управление на основе широтно-импульсной модуляции (ШИМ).
ПРО осуществляет отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей δ, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным линейным рассогласованиям hy, hz.
Недостатком известной СН является то, что реализуемое в ней соотношение n частоты сигнала линеаризации ПРО (соответственно, частоты формируемого одноканального релейного сигнала управления ПРО) и частоты вращения ракеты по крену постоянно и не зависит от изменения характеристик ракеты и ПРО в течение полетного времени. Как следует из описания этой СП, в течение всего полета ракеты выполняется условие n=3, т.е. сигнал управления ПРО формируется на утроенной частоте вращения по крену (за один период вращения ракеты осуществляется шесть переключений уровня этого сигнала).
Сохранение постоянного значения n оптимально в тех случаях, когда в течение всего полета ракеты временное запаздывание τ ПРО обратно пропорционально частоте вращения. Например, в ракетах с воздушно-динамическим ПРО перекладка рулей осуществляется за счет энергии набегающего потока, вследствие чего временное запаздывание ПРО обратно пропорционально продольной скорости ракеты  и, если в таких ракетах вращение по крену осуществляется за счет косопоставленного оперения, то частота вращения пропорциональна скорости
и, если в таких ракетах вращение по крену осуществляется за счет косопоставленного оперения, то частота вращения пропорциональна скорости  (k1, k2 - коэффициенты пропорциональности).
(k1, k2 - коэффициенты пропорциональности).
Фазовое запаздывание ПРО определяется по зависимости:
 .
.
Для рассмотренного случая фазовое запаздывание ПРО представляет собой постоянную величину ϕ=k1k2=const, что обеспечивает неизменность выходных характеристик ПРО в течение всего полета.
Однако в определенных условиях реализация постоянного по полету соотношения n может приводить к ухудшению точности наведения на отдельных участках полета вследствие появления искажений команд управления при их отработке ПРО, например:
в СП с воздушно-динамическим ПРО на участке работы маршевого двигателя (МД) возможна непропорциональность частоты вращения ракеты по углу крена ее продольной скорости  вследствие дополнительной подкрутки по крену
вследствие дополнительной подкрутки по крену  соплами МД;
соплами МД;
в СН с электромагнитным ПРО, где перекладка рулей осуществляется за счет энергии электромагнита, его временное запаздывание практически постоянно (τ=const) и не зависит от полетной скорости, а следовательно, фазовое запаздывание ПРО для этого случая

непостоянно и пропорционально продольной скорости ракеты.
Это означает, что на максимальных скоростях ракеты (соответственно, при максимальной частоте вращения по крену и минимальной ширине управляющих импульсов релейного двухпозиционного сигнала) ПРО вносит максимальное фазовое запаздывание и руль не всегда доходит до своих упоров (максимальных угловых положений ±δmax) при отработке этого сигнала вследствие высокой инерционности, искажая результирующую команду управления на ракету. Если фазовое опережение большой величины можно в среднем скомпенсировать (например, как описано в патенте RU №2234671, МПК7 F42B 15/01, F41G 7/24, 15.12.02), то возникающие при этом амплитудные и фазовые искажения выходного сигнала ПРО (величина которых различна в зависимости от управляющей команды, определяющей скважность импульсов при ШИМ) неизбежно ухудшают точность наведения.
Задачей предлагаемого изобретения является обеспечение в течение всего полета высокой точности наведения одноканальной вращающейся с помощью аэродинамических сил ракеты с релейным двухпозиционным ПРО.
Для решения поставленной задачи необходимо формирование вида сигнала линеаризации (соответственно, релейного сигнала управления) с таким соотношением n, при котором оптимально линеаризуется ПРО с точки зрения его работы с минимальными искажениями для любого участка полета ракеты.
Поставленная задача решается за счет того, что по сравнению с известным способом наведения вращающейся ракеты с релейным ПРО, включающим формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты сигналами, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, по условию n=3, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа, до момента включения маршевого двигателя ракеты и после его выключения сигнал линеаризации формируют по условию n=3, а во время работы маршевого двигателя сигнал линеаризации формируют по условию n=2.
Всю траекторию ракеты в процессе ее полета в зависимости от характера изменения баллистических и динамических характеристик и величины располагаемой перегрузки можно условно разделить на несколько участков:
участки излета до включения МД и после окончания его работы;
участок полета с работающим МД.
Участки излета, с одной стороны, характеризуются постоянством соотношения полетной скорости ракеты и ее частоты вращения по крену. С другой стороны, на них возможен дефицит располагаемой перегрузки ракеты, поскольку в вертикальной плоскости ракета должна развивать ускорение, компенсирующее кинематическое ускорение от силы тяжести. Под располагаемой перегрузкой ракеты понимается наибольшая перегрузка (ускорение) ракеты, которую она может развить при максимальном отклонении рулей (Дмитриевский А.А. Внешняя баллистика. - М.: Машиностроение, 1979, с.126).
На участках излета целесообразным является реализация вида сигнала линеаризации, обеспечивающего максимально возможные команды вверх и ограниченные команды вниз и соответствующего ближайшему аналогу, где результирующий релейный сигнал управления формируется на утроенной частоте вращения (n=3).
На участке полета с работающим МД, где частота вращения по крену и располагаемая перегрузка ракеты достигают своих максимальных значений, причем частота вращения по крену, в общем случае, не всегда пропорциональна полетной скорости, возникает необходимость перехода к такому виду сигнала линеаризации, при котором происходит формирование одноканального релейного сигнала управления на более низкой - удвоенной частоте вращения ракеты по крену (n=2), что улучшает условия работы ПРО за счет уменьшения количества переключений уровней релейного сигнала управления с шести до четырех за период вращения и сводит к минимуму возможные амплитудные и фазовые искажения команд управления при их отработке ПРО.
В СН, реализующую предлагаемый способ, в отличие от известной СН вращающейся ракеты с релейным ПРО, включающей ИИ на пусковом устройстве, оптически связанный с ним ПИ, ФСУ в вертикальной плоскости и горизонтальной плоскости, выходы которых соединены соответственно с первыми входами первого модулятора и второго модулятора, СУ, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, ГДУК, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов ГДУК являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2, ФСЛ, вход которого соединен со вторым выходом ГДУК, ЛУ, вход которого соединен со вторым выходом ГДУК, третий модулятор, первый вход которого соединен с выходом ФСЛ, второй вход соединен с выходом ЛУ, а выход соединен с третьим входом СУ, двухпозиционный РЭ, вход которого соединен с выходом СУ, а также ПРО, вход которого соединен с выходом двухпозиционного РЭ, введены источник временного сигнала (ИВС) и второе ЛУ, первый вход которого соединен со вторым выходом ГДУК, второй вход соединен с выходом ИВС, а выход соединен с третьим входом третьего модулятора.
Графические материалы представлены на фиг.1-6.
На фиг.1 приведены сигналы С(γ), S(γ), UЛ, i, UЛ1, поясняющие работу известной СН.
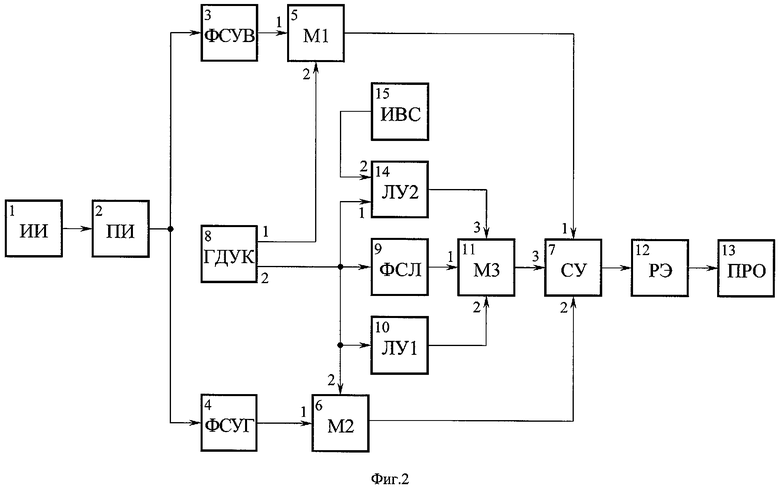
Структура предлагаемой СН приведена на фиг.2, где 1 - ИИ, 2 - ПИ, 3 - ФСУ в вертикальной плоскости (ФСУВ), 4 - ФСУ в горизонтальной плоскости (ФСУГ), 5 - первый модулятор (M1), 6 - второй модулятор (М2), 7 - СУ, 8 - ГДУК, 9 - ФСЛ, 10 - первое ЛУ (ЛУ1), 11 - третий модулятор (М3), 12 - двухпозиционный РЭ, 13 - релейный ПРО, 14 - второе ЛУ (ЛУ2), 15 - ИВС.
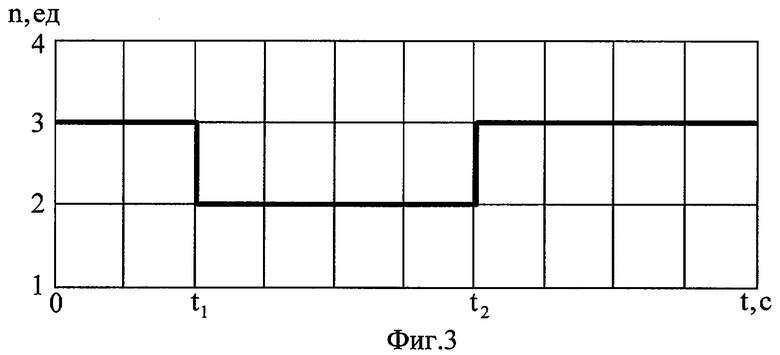
На фиг.3 представлена зависимость реализуемого соотношения n от полетного времени t для предлагаемого способа наведения, где
t1 - момент времени, связанный с включением МД;
t2 - момент времени, связанный с выключением МД.
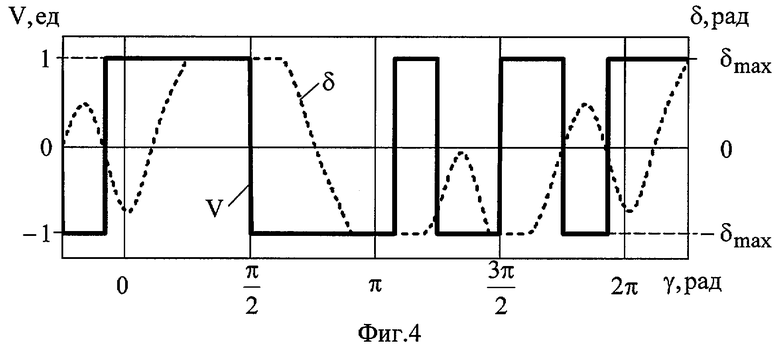
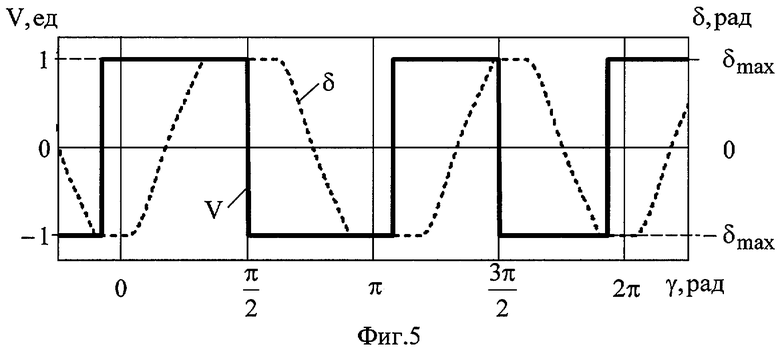
Входной релейный сигнал управления ПРО V и его выходной сигнал δmax для предлагаемой СН представлены на фиг.4 для n=3 и на фиг.3 для n=2 (на обеих фигурах - при величинах команд hy/АЛ=0,3; hz/АЛ=0), из которых видно, что формирование релейного сигнала управления на удвоенной частоте вращения ракеты по крену (n=2) улучшает условия работы ПРО и сводит к минимуму возможные амплитудные и фазовые искажения команд управления при их отработке ПРО.
На фиг.6 представлены сигналы с выходов элементов предлагаемой СН, поясняющие ее работу.
Предлагаемая СН работает следующим образом.
ПИ 2 на ракете принимает модулированное излучение, формируемое ИИ 1 на пусковом устройстве. Сигналы линейных рассогласований hy, hz (между положением ракеты и осью луча) с выходов ФСУВ 3 и ФСУГ 4 перемножаются на модуляторах M1 5 и М2 6 с сигналами С(γ), S(γ) с выходов ГДУК 8, являющимися релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2.
ФСЛ 9 на основе информации с ГДУК 8 реализует на каждом периоде вращения ракеты по углу крена пилообразный сигнал UЛ вида (1).
ЛУ1 10 обеспечивает инверсию исходного сигнала линеаризации UЛ на четверти оборота вращения ракеты по углу крена согласно зависимости (2). ЛУ2 14, управляемое не только сигналом со второго выхода ГДУК 8, но и сигналом с выхода ИВС 15, формирует сигнал в соответствии с зависимостью:

В результате перемножения на М3 11 исходного сигнала линеаризации и сигналов с выходов ЛУ1, ЛУ2 скорректированный сигнал линеаризации UЛ1=ijUЛ с выхода третьего модулятора при t<t1 и t>t2 будет соответствовать (3), а при t1≤t≤t2 будет иметь вид:
После суммирования промодулированных рассогласований со скорректированным сигналом линеаризации на СУ 7 и определения знака суммы двухпозиционным РЭ 12 результирующий сигнал управления, поступающий на одноканальный релейный ПРО 13, имеет вид (4) и в течение времени t<t1 и t>t2 формируется на утроенной частоте вращения ракеты по крену (n=3), а в течение времени t1≤t≤t2 - на удвоенной (n=2).
ПРО осуществляет отработку этого сигнала. Отклонения рулей создают управляющий момент, соответствующий исходным командам управления в измерительной СК и возвращающий ракету к оси луча.
Оптимальные значения моментов времени t1 и t2 определяются априорно конкретно для каждого типа ракет и реализуются в ИВС. Момент времени t1 может быть выбран непосредственно в момент включения МД или по истечении некоторого времени после включения МД исходя из возможного ухудшения условий работы ПРО (например, при значительном возрастании частоты вращения по крену).
Момент времени t2 может быть выбран непосредственно в момент выключения МД или по истечении некоторого времени после выключения МД.
В качестве ИВС может быть использована схема, представленная в книге У.Титце, К.Шенк. Полупроводниковая схемотехника. М.: "Мир", 1982, с.157.
В качестве остальных элементов СН могут быть использованы устройства, представленные в ближайшем аналоге.
Преимуществом предлагаемого способа и реализующей его СН является обеспечение высокой точности наведения ракеты за счет формирования команд управления, оптимальных в течение всего времени полета, а именно на утроенной частоте вращения ракеты по крену на участках излета и на удвоенной частоте вращения на участке работы МД.
На участках излета такая СН позволяет сохранить положительные свойства ближайшего аналога:
в условиях дефицита располагаемой перегрузки сформировать максимально возможные команды вверх в вертикальной плоскости, что позволяет обеспечить максимально возможную дальность полета ракеты;
ввести ограничение команд вниз, что снижает вероятность столкновения ракеты с подстилающей поверхностью в случае ее непосредственной близости (1,0-1,5 м) к линии визирования;
снизить чувствительность замкнутого контура управления к расфазировкам, вносимым элементами аппаратуры управления.
На участке работы МД при максимальных значениях скорости ракеты и располагаемой перегрузки, где применение сигнала управления на утроенной частоте не является необходимым, СН позволяет улучшить условия работы ПРО за счет уменьшения количества переключений уровней релейного сигнала управления на периоде вращения, сформированного на более низкой - удвоенной частоте вращения по крену.
Применение предлагаемого способа и СН позволяет обеспечить высокую точность наведения вращающихся по углу крена одноканальных ракет с релейными ПРО в течение всего полетного времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА (ВАРИАНТЫ) | 2006 |
|
RU2326323C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2473864C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2284001C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
Изобретение относится к области систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР. Технический результат - повышение точности наведения на всех участках полета, характеризуемых разбросом баллистических и динамических характеристик ракет и привода. Согласно изобретению осуществляют формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты сигналами. Формируют сигнал линеаризации, синфазный с периодическими по углу крена сигналами, по условию n=3, причем  , где ω0 - частота сигнала линеаризации,
, где ω0 - частота сигнала линеаризации,  - частота вращения ракеты по крену. Суммируют промодулированные сигналы управления и сигнал линеаризации. Осуществляют формирование релейного двухпозиционного сигнала посредством определения знака этой суммы и преобразование полученного релейного сигнала управления в отклонение рулевого органа. Сигнал линеаризации до момента включения маршевого двигателя ракеты и после его выключения формируют по условию n=3, а во время работы маршевого двигателя - по условию n=2. 2 н.п. ф-лы, 6 ил.
- частота вращения ракеты по крену. Суммируют промодулированные сигналы управления и сигнал линеаризации. Осуществляют формирование релейного двухпозиционного сигнала посредством определения знака этой суммы и преобразование полученного релейного сигнала управления в отклонение рулевого органа. Сигнал линеаризации до момента включения маршевого двигателя ракеты и после его выключения формируют по условию n=3, а во время работы маршевого двигателя - по условию n=2. 2 н.п. ф-лы, 6 ил.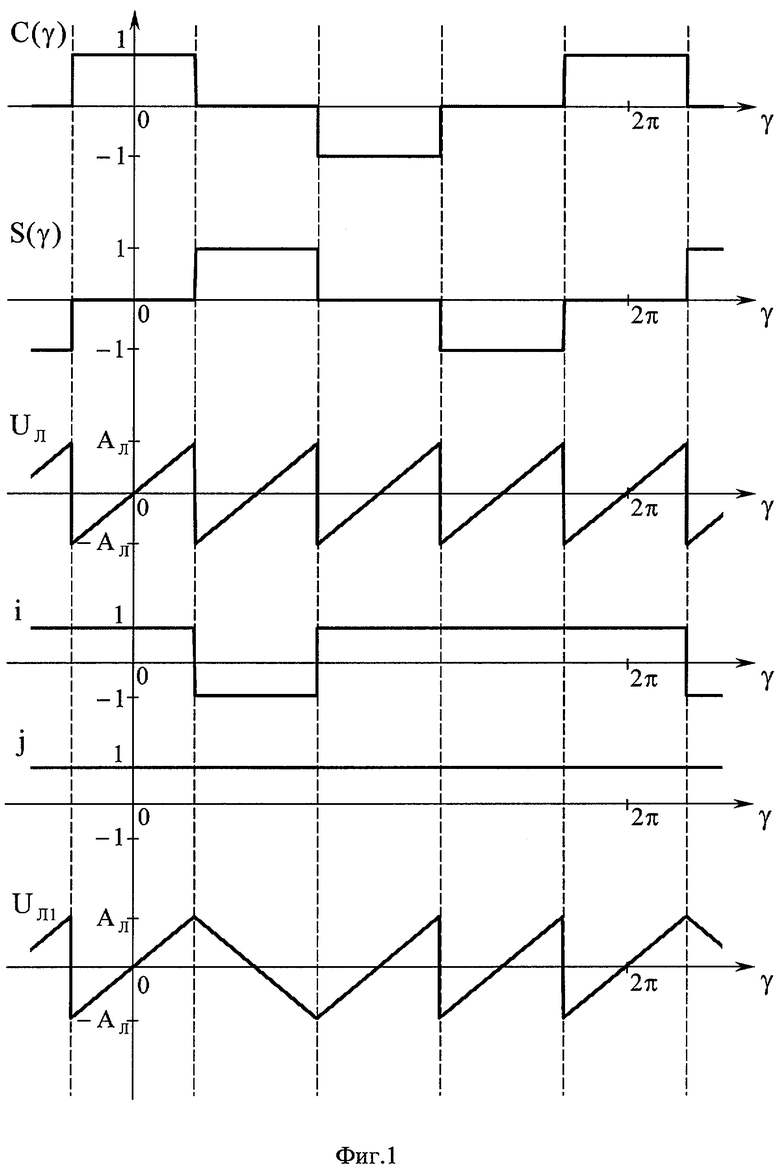
 , где ω0 - частота сигнала линеаризации,
, где ω0 - частота сигнала линеаризации,  - частота вращения ракеты по крену, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа, отличающийся тем, что сигнал линеаризации формируют в соответствии с условием n=3 до момента включения маршевого двигателя ракеты и после его выключения, а во время его работы сигнал линеаризации формируют в соответствии с условием n=2.
- частота вращения ракеты по крену, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа, отличающийся тем, что сигнал линеаризации формируют в соответствии с условием n=3 до момента включения маршевого двигателя ракеты и после его выключения, а во время его работы сигнал линеаризации формируют в соответствии с условием n=2.
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| US 5248114 A, 28.09.1993 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| ЕР 0529796 А1, 03.03.1993. | |||

