Предлагаемое изобретение относится к области разработки систем телеуправления вращающихся вокруг продольной оси ракет и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах.
Одной из задач, решаемых при разработке систем телеуправления ракетами, является задача обеспечения пропорциональности ускорения, развиваемого ракетой в вертикальной и горизонтальной плоскостях наведения, измеренным отклонениям ракеты относительно оси луча (в системах управления по лучу) или оси пеленгатора ракеты (в системах командного управления) соответственно в вертикальной и горизонтальной плоскостях. В идеальном случае вектор ускорения, развиваемого ракетой, и вектор отклонения ракеты от линии прицеливания лежат в одной плоскости и направлены в противоположные стороны (Н.Т.Кузовков, Системы стабилизации летательных аппаратов, М., Высшая школа, 1976 г. [1], стр.226).
Известен способ формирования команд управления невращающейся вокруг продольной оси (стабилизированной по крену) двухканальной ракеты (содержащей две пары рулевых органов - рулей), заключающийся в формировании сигналов управления первого и второго каналов, пропорциональных линейным отклонениям ракеты от линии прицеливания в горизонтальной и вертикальной плоскостях и подаче их на соответствующие рули направления и высоты ([1], стр.221-223).
Пропорциональность между вектором ускорения, развиваемого ракетой, и вектором отклонения ракеты от линии прицеливания в известном способе формирования команд управления достигается за счет стабилизации ракеты в полете по крену и соответствующей начальной ориентацией систем координат, связанных с лучом, гироскопом крена и ракетой.
Недостатком известного способа формирования команд управления стабилизированной по крену ракетой является низкая точность наведения ракеты на цель при воздействии внешних возмущающих моментов, вызванных, например, несимметрией корпуса ракеты, эксцентриситетом тяги двигателя и т.п. ([1], стр.236).
Наиболее близким по технической сущности к предлагаемому изобретению является способ формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой ([1], стр.236-238), заключающийся в формировании первого U1 (горизонтального) и второго U2 (вертикального) сигналов управления, пропорциональных линейным отклонениям h1, h2 ракеты относительно линии прицеливания соответственно в горизонтальной и вертикальной плоскостях, формировании периодических по углу крена сигналов несущей частоты s(γ), с(γ), пропорциональных синусу и косинусу угла крена γ ракеты и формировании сигналов управления Up1 и Up2 первым и вторым рулевыми приводами (в источнике информации "рулевыми трактами") путем амплитудной модуляции сигналов несущей частоты сигналами управления первого и второго каналов и последующего их суммирования в соответствии с зависимостями

при этом формирование сигналов несущей частоты и их амплитудная модуляция сигналами управления первого и второго каналов осуществляется с помощью устройства, реализованного также на базе свободного гироскопа крена ([1], стр.238, рис.7.16).
С осью наружного кольца гироскопа крена, направленной по продольной оси ракеты, связываются роторы двух вращающихся синусно-косинусных трансформаторов (СКВТ). Статоры этих трансформаторов, будучи связанными с корпусом ракеты, вращаются вместе с ракетой относительно неподвижных роторов. Так как гироскоп крена суть свободный астатический гироскоп, угол поворота статора относительно ротора СКВТ равен углу крена γ ракеты.
Оси однофазных обмоток, уложенных на роторах, взаимно перпендикулярны, а соответственные обмотки статоров параллельны. К ротору CKBT1 подводится напряжение переменного тока, величина и фаза которого зависят от величины и знака сигнала управления первого канала, а к ротору СКВТ2 напряжение, зависящее от сигнала управления второго канала. При вращении ракеты по крену с соответствующих обмоток роторов первого и второго СКВТ будут сниматься амплитудно-модулированные сигналы: U1·с(γ); -U1·s(γ); U2·с(γ); U2·s(γ), которые затем суммируются в усилителях рулевых машинок в соответствии с зависимостями (1).
Недостатком известного способа формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой является наличие фазовой связи (расфазировки) между горизонтальным и вертикальным каналами управления ракетой, обусловленной инерционностью рулевых приводов.
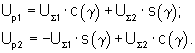
Пояснить механизм возникновения фазовой связи каналов управления и оценить ее величину позволяет структурная схема, приведенная на фиг.1, описывающая динамические процессы формирования сигналов управления рулевыми приводами и их последующей отработки по известному способу.
На фиг.1 обозначено:
К - коэффициент пропорциональности между линейными отклонениями h1, h2 ракеты относительно линии прицеливания в горизонтальной и вертикальной плоскостях и сигналами управления U1, U2 первого и второго каналов;
WРП(р) - передаточная функция рулевых приводов;
р=d/dt - оператор дифференцирования;
Up1, Up2 - сигналы управления первым и вторым рулевыми приводами;
δ1, δ2 - углы отклонения рулей первого и второго рулевого привода;
δ1', δ2' - проекции углов отклонения рулей на горизонтальную и вертикальную плоскости наведения;
 - угол крена ракеты;
- угол крена ракеты;
ω0 - круговая частота вращения ракеты по крену.
Используя аппарат комплексных переменных и комплексных передаточных функций (А.А.Казамаров, А.М.Палатник, Л.О.Роднянский, Динамика двумерных систем автоматического регулирования, М., Наука, 1967 г., [2]), и полагая, что s(γ)=sin(γ) и с(γ)=cos(γ), структурную схему, изображенную на фиг.1, можно привести к виду, изображенному на фиг.2, где
 - комплексный вектор отклонения ракеты от линии прицеливания;
- комплексный вектор отклонения ракеты от линии прицеливания;  ;
;
 - комплексный вектор управляющего воздействия на ракету.
- комплексный вектор управляющего воздействия на ракету.
В идеальной системе управления ракетой (без фазовой связи в каналах управления) вектор отклонения ракеты  и вектор управляющего воздействия
и вектор управляющего воздействия  лежат в одной плоскости и направлены в противоположные стороны. В этом случае реализуется так называемая радиальная коррекция ракеты по отношению к лучу, т.е. ликвидация отклонения по кратчайшему пути - в плоскости, в которой лежит вектор ([1], стр.241).
лежат в одной плоскости и направлены в противоположные стороны. В этом случае реализуется так называемая радиальная коррекция ракеты по отношению к лучу, т.е. ликвидация отклонения по кратчайшему пути - в плоскости, в которой лежит вектор ([1], стр.241).
Как видно из фиг.2, в системе управления, реализующей известный способ формирования команд управления рулевыми приводами, между вектором управляющего воздействия и вектором отклонения ракеты от линии прицеливания имеет место соотношение

Как видно из зависимости (2), в установившемся процессе (при p→0)

Учитывая что, WРП(-jω0)=А(ω0)·ехр(-jϕз(ω0),
где А(ω0) - коэффициент передачи рулевого привода на частоте вращения ракеты по крену ω0;
ϕз(ω0) - фазовое запаздывание рулевого привода при отработке входного сигнала на частоте вращения ракеты по крену.
Зависимость (3) можно переписать в виде:

из которой видно, что вектор управляющего воздействия и вектор отклонения ракеты от линии прицеливания в известном способе формирования команд управления не лежат в одной плоскости, а расположены под углом ϕз(ω0), равным фазовому запаздыванию рулевого привода на частоте вращения ракеты по крену ω0.
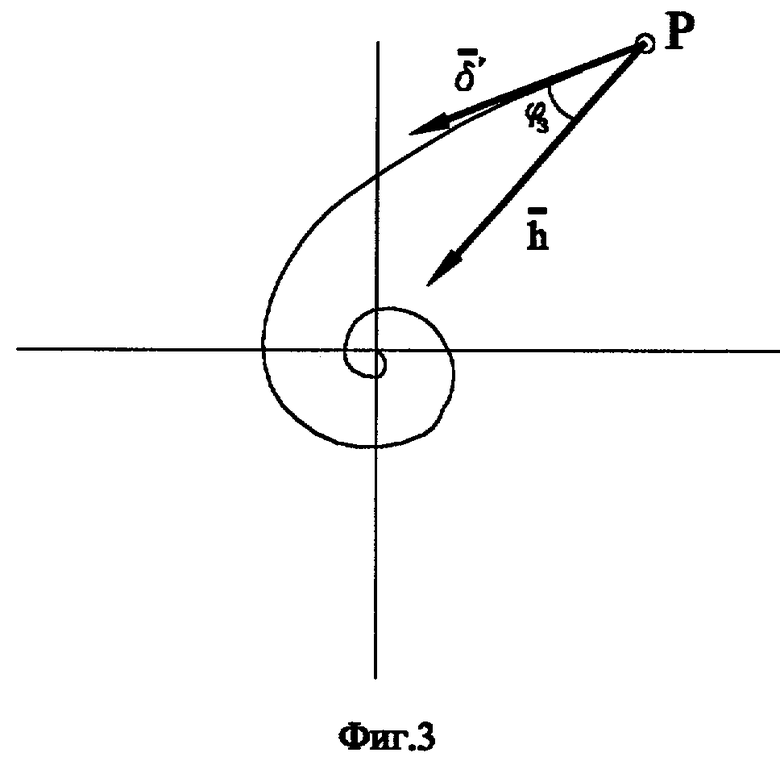
Это приводит к тому, что ликвидация отклонения ракеты от линии прицеливания будет происходить уже не по кратчайшему пути - в плоскости измеряемого отклонения, а будет носить спиралевидный характер, как это изображено на фиг.3. Величина фазового запаздывания рулевого привода на частоте вращения ракеты по крену и характеризует в известном способе формирования команд управления величину фазовой связи (расфазировки) каналов управления. Наличие расфазировки каналов управления увеличивает время вывода ракеты на линию визирования цели и снижает точность наведения ракеты на цель, а при достаточно большой величине расфазировки, например 20...30°, может произойти срыв наведения.
Задачей предлагаемого изобретения является повышение точности наведения ракеты на цель за счет устранения фазовой связи каналов управления ракетой, вызванной инерционностью рулевого привода, путем корректировки фазы входных сигналов рулевого привода в соответствии с текущим фазовым запаздыванием выходных.
Поставленная задача решается посредством того, что в известном способе формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой, включающем формирование сигналов управления U1, U2 первого и второго каналов, пропорциональных линейным отклонениям ракеты относительно линии прицеливания в горизонтальной и вертикальной плоскостях, формирование периодических сигналов несущей частоты s(γ), с(γ), пропорциональных синусу и косинусу угла крена γ ракеты, формирование сигналов управления Up1, Up2 первым и вторым рулевыми приводами путем амплитудной модуляции несущей частоты сигналами управления первого и второго каналов и последующего их суммирования, - одновременно с формированием сигналов управления первого и второго каналов формируют сигналы Uδ1, Uδ2, пропорциональные углам отклонения первого и второго рулевого органа, подвергают их демодуляции путем умножения на сигналы несущей частоты и последующему усилению, затем вычитают из сигналов управления первого и второго каналов в соответствии с зависимостями:

где UΣ1, UΣ2 - сигналы разности в первом и втором каналах,
Ку - коэффициент усиления,
амплитудную модуляцию сигналов несущей частоты осуществляют полученными сигналами разности в первом и втором каналах управления, а суммирование осуществляют в соответствии с зависимостями:

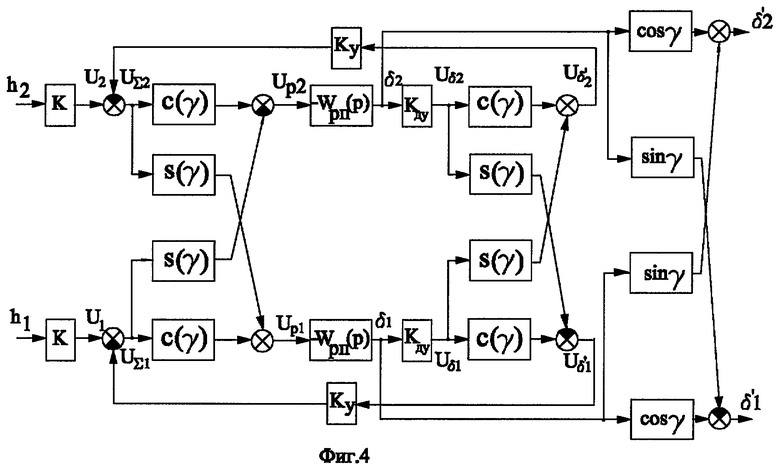
Пояснить механизм устранения фазовой связи каналов управления в предлагаемом способе формирования команд управления поможет структурная схема на фиг.4, отражающая динамические процессы формирования сигналов управления рулевыми приводами и их последующей отработки по предлагаемому способу.
На фиг.4 обозначено:
КДУ - коэффициент передачи датчика угла отклонения руля;
UΣ1, UΣ2 - сигналы разности в первом и втором каналах управления;
Uδ1 ', Uδ2 ' - демодулированнные сигналы отклонения первого и второго рулевого органа.
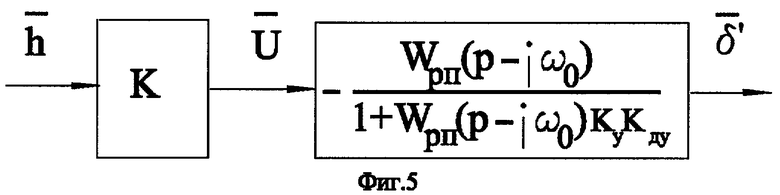
Используя аппарат комплексных переменных и комплексных передаточных функций, структурную схему, изображенную на фиг.4, можно привести к виду, изображенному на фиг.5.
Как видно на фиг.5, в системе управления вращающейся вокруг продольной оси двухканальной ракетой, реализующей предлагаемый способ формирования команд управления рулевыми приводами между векторами управляющего воздействия на ракету и отклонения ракеты от линии прицеливания имеет место соотношение

В установившемся процессе (при р→0)

Назначая коэффициент усиления демодулированных сигналов отклонения первого и второго рулевых органов Ку таким, чтобы

получим

Ввиду того, что выражение К/КуКДУ является действительной величиной и не зависит от частоты вращения ракеты по крену ω0, зависимость (8) показывает, что при реализации предлагаемого способа формирования команд управления ракеты вектор управляющего воздействия и вектор отклонения ракеты от линии прицеливания лежат в одной плоскости, т.е. фазовая связь каналов управления, обусловленная инерционностью рулевых приводов, отсутствует.
Одним из возможных вариантов реализации предлагаемого способа формирования команд управления в системе телеуправления вращающихся ракет является устройство, изображенное на фиг.6, которое получается, если в известное устройство ([1], стр.238, рис.7.16) ввести: два вращающихся синусно-косинусных трансформатора СКВТ3 и СКВТ4 (аналогично CKBT1 и СКВТ2), роторы которых связаны с осью наружного кольца гироскопа крена, а статоры - с корпусом ракеты, четыре усилителя 3, 4, 5, 6;
два датчика угла отклонения руля соответственно первого и второго рулевого привода.
На фиг.6 обозначено:
Р - ракета;
Ц - цель;
CKBT1...СКВТ4 - синусно-косинусные вращающиеся трансформаторы;
У - операционные усилители;
РМ - рулевые машинки;
ДУ - датчики угла отклонения руля;
Uδ1, Uδ2 - сигналы с датчиков угловых отклонений рулей первого и второго рулевого привода;
U1, U2 - сигналы первого и второго каналов, пропорциональные линейным отклонениям ракеты h1, h2 от линии прицеливания.
На выходах датчиков угловых отклонений (ДУ) формируются сигналы Uδ1, Uδ2, пропорциональные углам отклонения первого и второго рулевых органов. К ротору СКВТ3 подводится напряжение переменного тока, величина и фаза которого зависит от величины и знака сигнала Uδ1, а к ротору СКВТ4 - напряжение, зависящее от величины и знака сигнала Uδ2. С выходов синусных и косинусных обмоток статоров СКВТ3 и СКВТ4 снимаются демодулированные сигналы Uδ1·cos(γ); Uδ1·sin(γ); Uδ2·cos(γ); -Uδ2·sin(γ), которые усиливаются и суммируются в усилителях 3 и 4 в соответствии с зависимостями:

где U3, U4 - сигналы на выходах усилителей 3, 4.
В усилителях 5 и 6 указанные сигналы вычитаются из сигналов управления первого и второго каналов U1, U2, пропорциональных линейным отклонениям ракеты относительно линии прицеливания, так что на выходах усилителей 5 и 6 формируются сигналы разности
К ротору CKBT1 подводится напряжение переменного тока, величина и фаза которого зависят от величины и фазы сигнала разности UΣ1, а к ротору СКВТ2 - напряжение, зависящее от величины и знака сигнала разности UΣ2. В синусных и косинусных обмотках статоров CKBT1 и СКВТ2 осуществляется амплитудная модуляция сигналов несущей частоты, равной частоте вращения ракеты по крену сигналами разности UΣ1, UΣ2. В усилителях 1 и 2 рулевых приводов указанные амплитудно-модулированные сигналы суммируются по следующим зависимостям:
В рассматриваемом устройстве производится сравнение входных сигналов - команд управления U1, U2 в измерительной невращающейся системе координат с сигналами, полученными путем разложения вращающегося выходного вектора команд управления  на составляющие Uδ1 ', Uδ2 ' в невращающейся системе координат и представляющими собой результат отработки сигналов управления рулевым приводом, который внес в них соответствующие искажения по фазе и амплитуде.
на составляющие Uδ1 ', Uδ2 ' в невращающейся системе координат и представляющими собой результат отработки сигналов управления рулевым приводом, который внес в них соответствующие искажения по фазе и амплитуде.
Результат сравнения используется для такого изменения входных сигналов РП, которое обеспечивало бы минимальное рассогласование между входным вектором команд управления  и выходным вектором управляющего воздействия .
и выходным вектором управляющего воздействия .
Источники информации
1. Н.Т.Кузовков, Системы стабилизации летательных аппаратов, М., Высшая школа, 1976 г. - ближайший аналог.
2. А.А.Казамаров, А.М.Палатник, Л.О.Роднянский, Динамика двумерных систем автоматического регулирования, М., Наука, 1967 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1992 |
|
RU2044331C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ С АЭРОДИНАМИЧЕСКИМИ РУЛЯМИ | 2000 |
|
RU2182306C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ КОРРЕКЦИИ УГЛА КРЕНА И КОРРЕКТОР УГЛА КРЕНА | 2007 |
|
RU2362108C2 |

Изобретение относится к области разработки систем телеуправления вращающихся вокруг продольной оси ракет и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах. Технический результат повышение точности наведения ракеты на цель за счет устранения фазовой связи каналов управления ракетой, вызванной инерционностью рулевого привода и разбросом частоты вращения ракеты по крену путем корректировки фазы входных сигналов рулевого привода в соответствии с текущим фазовым запаздыванием выходных. Поставленная задача решается посредством того, что в известном способе формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой, включающем формирование сигналов управления U1, U2 первого и второго каналов, пропорциональных линейным отклонениям ракеты относительно линии прицеливания в горизонтальной и вертикальной плоскостях, формирование периодических сигналов несущей частоты s(γ), с(γ), пропорциональных синусу и косинусу угла крена γ ракеты, формирование сигналов управления Up1, Up2 первым и вторым рулевыми приводами путем амплитудной модуляции несущей частоты и последующего их суммирования, одновременно с формированием сигналов управления первого и второго каналов формируют сигналы Uδ1, Uδ2, пропорциональные углам отклонения первого и второго рулевых органов, подвергают их демодуляции путем умножения на сигналы несущей частоты и последующему усилению, затем вычитают из сигналов управления первого и второго каналов в соответствии с первыми заданными математическими зависимостями, причем амплитудную модуляцию сигналов несущей частоты осуществляют полученными сигналами разности в первом и втором каналах управления, а суммирование осуществляют в соответствии со вторыми заданными математическими зависимостями. 6 ил.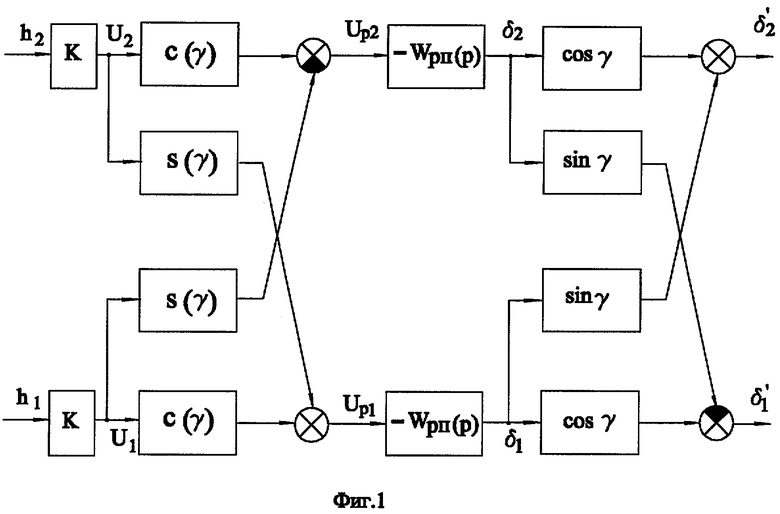
Способ формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой, включающий формирование сигналов управления U1, U2 первого и второго каналов, пропорциональных линейным отклонениям ракеты относительно линии прицеливания соответственно в горизонтальной и вертикальной плоскостях, формирование периодических сигналов несущей частоты s(γ), с(γ), пропорциональных синусу и косинусу угла крена γ ракеты, формирование сигналов управления Up1, Up2 первым и вторым рулевыми приводами путем амплитудной модуляции сигналов несущей частоты и последующего их суммирования, отличающийся тем, что одновременно с формированием сигналов управления первого и второго каналов формируют сигналы Uδ1, Uδ2, пропорциональные углам отклонения первого и второго рулевых приводов, подвергают их демодуляции путем умножения на сигналы несущей частоты и последующему усилению, затем вычитают из сигналов управления первого и второго каналов в соответствии с зависимостями
где UΣ1, UΣ2 - сигналы разности в первом и втором каналах;
Кy - коэффициент усиления,
причем амплитудную модуляцию сигналов несущей частоты осуществляют полученными сигналами разности в первом и втором каналах управления, а суммирование осуществляют в соответствии с зависимостями
| КУЗОВКОВ Н.Т | |||
| Системы стабилизации летательных аппаратов | |||
| - М.: Высшая школа, 1976, с.236-238 | |||
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 5197691 A, 30.03.1993 | |||
| DE 3034838 C1, 29.11.1990. | |||

