Предлагаемая группа изобретений относится к области разработки систем наведения (СН) ракет и может быть использована в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности их наведения.
Известен способ наведения вращающейся ракеты, заключающийся в формировании модулированного излучения, приеме аппаратурой управления ракеты этого излучения, формировании сигнала, пропорционального координатам ракеты относительно оси луча, совмещенной с линией визирования цели (ЛВЦ), формировании сигналов управления посредством преобразования сигналов, пропорциональных координатам ракеты и связанных с лучом лазера, в систему координат, связанную с вращающейся ракетой, и преобразовании сигналов управления в отклонение рулей /патент RU №2107879, МПК6 F41G 7/00, 7/24, 27.03.98/.
СН, реализующая этот способ, включает источник модулированного излучения на пусковой установке и управляемую ракету. Аппаратура управления ракеты принимает модулированное излучение, вырабатывает сигналы, пропорциональные ее отклонениям относительно центра излучения (оси луча), и формирует команды управления рулями в связанной с вращающейся ракетой системе координат. Отклонения рулей возвращают ракету к оси луча.
Аналогично лучевым СН осуществляется управление ракетой в командных СН с тем лишь различием, что формирование сигнала, пропорционального координатам ракеты относительно ЛВЦ, производится на пусковой установке (командном пункте), и затем он передается на борт ракеты по линии связи /Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с.29/.
Недостатком этих способов является формирование сигналов управления пропорционально только отклонениям ракеты, а необходимые для наведения сигналы управления, пропорциональные скорости изменения (производной) этих отклонений, отсутствуют.
Наиболее близким к предлагаемому является способ наведения вращающейся ракеты /патент RU №2219473, МПК7 F41G 7/24, F42B 15/01, 20.12.03/, заключающийся в формировании сигнала рассогласования между ракетой и ЛВЦ, суммировании сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляции суммарного сигнала периодическим по углу крена сигналом и преобразовании полученного сигнала в отклонение рулей ракеты.
СН /патент RU №2219473, МПК7 F41G 7/24, F42B 15/01, 20.12.03/, реализующая этот способ, включает последовательно соединенные формирователь сигнала рассогласования (ФСР) между ракетой и ЛВЦ, звено с регулируемым временем запаздывания (ЗРЗ), суммирующий усилитель (СУ), модулятор и привод руля (ПР), причем второй вход СУ соединен с выходом ФСР, а также блок выработки периодического по углу крена сигнала (БВСК), выход которого соединен со вторым входом модулятора, и измеритель периода (ИП), вход которого соединен с выходом БВСК, а выход соединен со вторым входом ЗРЗ, по которому осуществляется регулировка времени запаздывания τ.
В известном способе обеспечивается формирование сигнала управления, пропорционального отклонению ракеты от ЛВЦ (в вертикальной и горизонтальной плоскостях декартовой системы координат) и производной этого отклонения. Результирующий суммарный сигнал управления UΣ(t) на выходе СУ имеет вид:

где t - текущее полетное время;
U(t) - сигнал рассогласования на выходе ФСР;
U(t-τ) - сдвинутый на время запаздывания τ сигнал рассогласования U(t);
k - постоянный коэффициент (значение к выбирается 2…5).
Параметры k, τ определяют степень дифференцирования отклонения. Регулировка времени запаздывания τ от периода вращения ракеты по крену, измеряемого ИП, на вход которого поступает сигнал с БВСК, обеспечивает изменение дифференцирующих свойств в зависимости от изменения характеристик ракеты (скорость, частота собственных колебаний) по полету.
Модуляция суммарного сигнала UΣ периодическим по углу крена сигналом с БВСК преобразует сигнал управления из системы координат, связанной с ЛВЦ, в сигнал во вращающейся системе координат, связанной с ракетой, который преобразуется ПР в отклонение руля ракеты.
Данный способ обеспечивает снижение чувствительности СУ к высокочастотным помехам в целом по сравнению с применением традиционных дифференцирующих устройств и отсутствие «подчеркивания» помех на удвоенной частоте вращения ракеты по крену и частотах, кратных удвоенной частоте вращения по крену.
Однако на других частотах происходит усиление сигналов. Так, на частоте вращения ракеты по крену, утроенной, упятеренной и т.д., максимальное «подчеркивание» при k=2…5 достигает значения 2k+1=5…11.
В СН рассматриваемого класса возможно наличие в сигнале рассогласования как случайных помех, например, от флуктуации атмосферы, так и помех априорно известной частоты, связанных:
с механическими колебаниями пусковой установки;
с методическими погрешностями, возникающими в ФСР при дешифрации (демодуляции) сигнала модулированного излучения и кратными частоте сканирования модулирующего растра.
Недостатком данного способа и реализующей его СН является усиление помех (увеличение их амплитуды), присутствующих в сигнале рассогласования, которое может приводить к существенному увеличению отклонений ракеты и амплитуды ее колебаний по углам атаки.
Задачей предлагаемой группы изобретений является повышение точности наведения за счет подавления в сигнале рассогласования помех априорно известной частоты.
Поставленная задача решается за счет того, что по сравнению с известным способом, заключающимся в формировании сигнала рассогласования между ракетой и ЛВЦ, суммировании сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляции суммарного сигнала периодическим по углу крена сигналом и преобразовании полученного сигнала в отклонение руля ракеты, новым является то, что сигнал рассогласования предварительно суммируют со сдвинутым на время запаздывания τ1 сигналом рассогласования, причем время запаздывания устанавливают согласно зависимости 
В СН вращающейся ракеты, реализующей этот способ, включающей формирователь сигнала рассогласования между ракетой и линией визирования цели, последовательно соединенные звено с регулируемым временем запаздывания, суммирующий усилитель, модулятор и привод руля, а также блок выработки периодического по углу крена сигнала, выход которого соединен со вторым входом модулятора и входом измерителя периода, выход которого соединен с первым входом звена с регулируемым временем запаздывания, новым является то, что в нее введены последовательно соединенные звено с постоянным временем запаздывания (ЗПЗ), вход которого соединен с выходом формирователя сигнала рассогласования, и второй суммирующий усилитель, второй вход которого соединен с выходом формирователя сигнала рассогласования, а выход соединен со вторыми входами звена с регулируемым временем запаздывания и первого суммирующего усилителя.
Предлагаемое изобретение поясняется графическим материалом.
Структура предлагаемой СН приведена на фиг.1, где 1 - ФСР, 2 - ЗРЗ, 3 - первый СУ (СУ1), 4 - модулятор (М), 5 - БВСК, 6 - ИП, 7 - ПР, 8 - ЗПЗ, 9 - второй СУ (СУ2).
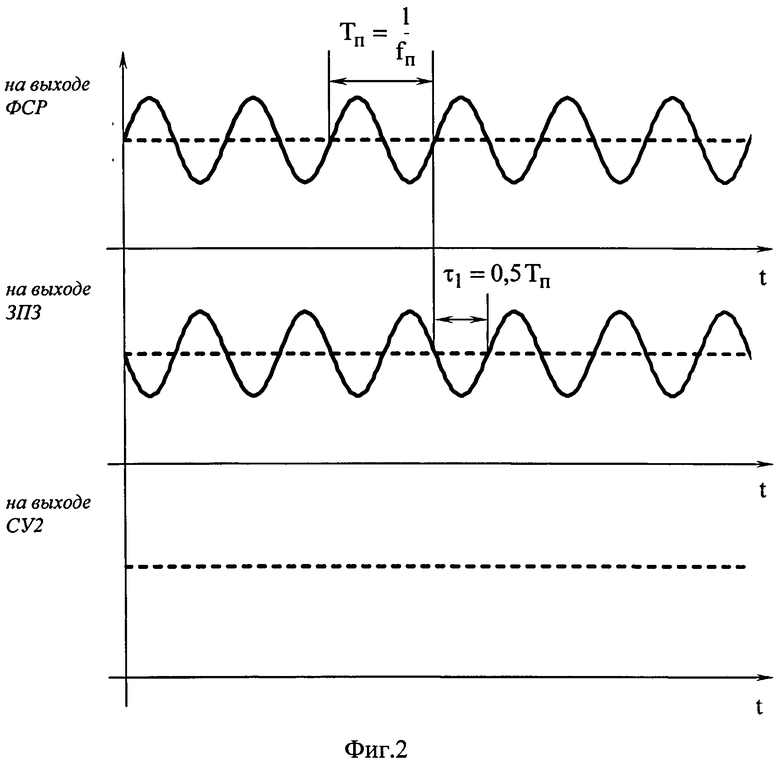
Вид сигналов, поясняющих работу блока введенных элементов, состоящего из ЗПЗ 8 и СУ2 9, приведен на фиг.2.
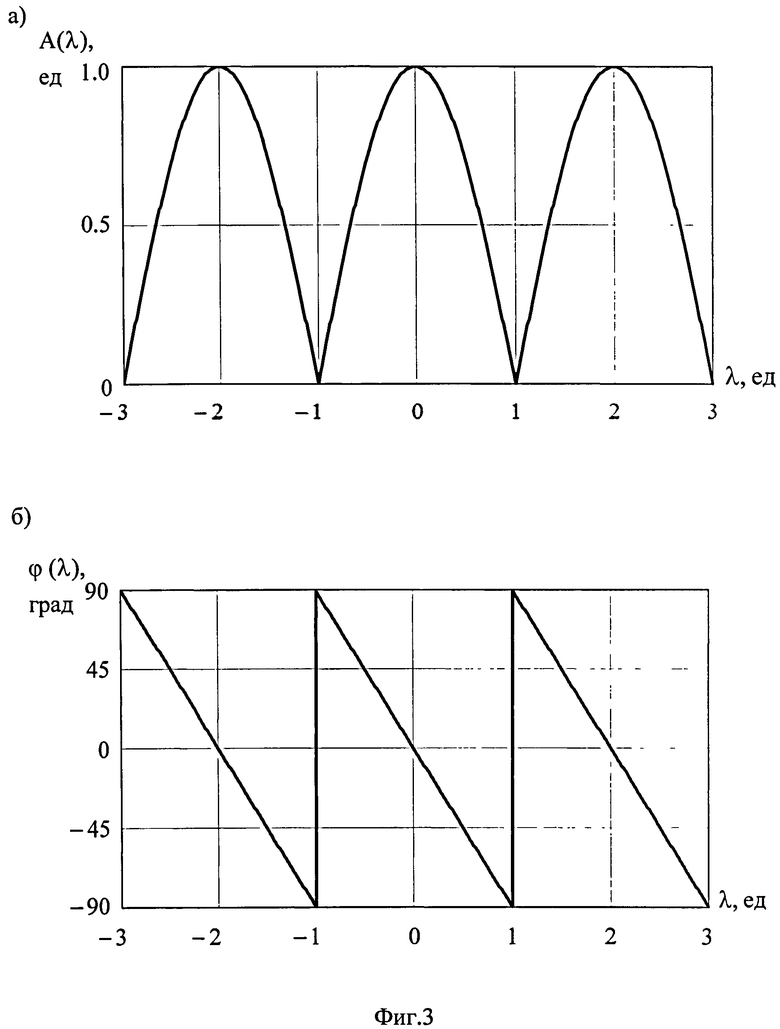
На фиг.3 представлены амплитудная А(λ) и фазовая φ(λ) частотные характеристики блока введенных элементов при одинаковых коэффициентах по входам СУ2 9, равных 0,5, для относительных частот 
СН работает следующим образом.
Сигнал с выхода ФСР 1 (фиг.1) поступает по двум цепям на СУ2 9, имеющий одинаковые коэффициенты усиления по двум своим входам, причем по одной из цепей сигнал проходит через ЗПЗ 8 со временем запаздывания 

Выходной сигнал СУ1 3 (с различными коэффициентами усиления по его входам, соответствующими прототипу) пропорционален текущим и предшествующим отклонениям ракеты от оси луча, создавая тем самым дифференцирующий эффект. Изменение времени запаздывания ЗРЗ 2 осуществляется по его первому входу, соединенному с ИП 6, обеспечивая тем самым пропорциональность времени запаздывания периоду вращения ракеты по крену. Сигнал, пропорциональный текущему значению угла крена ракеты, поступает на ИП 6 с выхода БВСК 5.
Результирующий сигнал управления с выхода СУ1 3 преобразуется на модуляторе М 4 с помощью опорного сигнала с выхода БВСК 5 из системы координат, связанной с ЛВЦ, во вращающуюся систему координат, связанную с ракетой, и поступает на ПР 7. Отклонения рулей возвращают ракету к ЛВЦ.
Поскольку ЗПЗ описывается передаточной функцией (ПФ) 
где k1, k2 - коэффициенты соответственно по первому и второму входам СУ2 9; 
При реализации k1=0,5; k2=0,5 его ПФ 
Согласно предлагаемому способу при 
Предложенная совокупность технических решений позволяет осуществлять подавление в сигналах координат паразитных помех, обеспечивая уменьшение колебаний ракеты по координатам и углам атаки от влияния этих помех.
В качестве элементов, входящих в состав СН, могут быть использованы устройства, представленные в ближайшем аналоге /патент RU №2219473, МПК7 F41G 7/24, F42B 15/01, 20.12.03/.
Элемент ЗПЗ является частным случаем элемента ЗРЗ без регулировки времени запаздывания. Звено такого типа является простым для реализации в цифровой аппаратуре (в частности микропроцессорной).
Применение предлагаемого способа и СН вращающихся по углу крена ракет позволяет повысить точность их наведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548687C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2004 |
|
RU2274817C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2009 |
|
RU2402743C1 |
| СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2002 |
|
RU2234671C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2284001C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2294515C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
Предлагаемая группа изобретений относится к области разработки систем наведения ракет и может быть использована в комплексах ПТУР и ЗУР. Изобретения предназначены для повышения точности наведения ракет за счет повышения точности работы системы управления при наличии в сигналах координат помех априорно известной частоты. Сущность предлагаемой совокупности технических решений заключается в том, что сигнал рассогласования, содержащий информацию об отклонении ракеты и помехе определенной частоты, дополнительно суммируют с сигналом рассогласования, сдвинутым относительно исходного в сторону запаздывания на время, равное половине периода гармонического сигнала помехи, в результате чего происходит подавление сигнала помехи в сигнале координат. В системе наведения вращающейся ракеты имеются формирователь сигнала рассогласования между ракетой и линией визирования цели, последовательно соединенные звено с регулируемым временем запаздывания, суммирующий усилитель, модулятор и привод руля, а также блок выработки периодического по углу крена сигнала, выход которого соединен со вторым входом модулятора и входом измерителя периода, выход которого соединен с первым входом звена с регулируемым временем запаздывания, новым является то, что в нее введены последовательно соединенные звено с постоянным временем запаздывания, вход которого соединен с выходом формирователя сигнала рассогласования, и второй суммирующий усилитель, второй вход которого соединен с выходом формирователя сигнала рассогласования, а выход соединен со вторыми входами звена с регулируемым временем запаздывания и первого суммирующего усилителя. 2 н.п. ф-лы, 3 ил.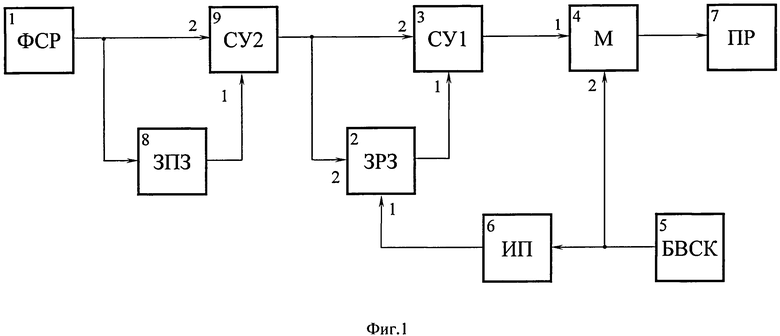
1. Способ наведения вращающейся ракеты, заключающийся в формировании сигнала рассогласования между ракетой и линией визирования цели, суммировании сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляции суммарного сигнала периодическим по углу крена сигналом и преобразовании полученного сигнала в отклонение руля ракеты, отличающийся тем, что сигнал рассогласования предварительно суммируют со сдвинутым на время запаздывания τ1 сигналом рассогласования, причем время запаздывания устанавливают согласно зависимости , где fп - априорно известная частота помехи в сигнале рассогласования.
2. Система наведения вращающейся ракеты, включающая формирователь сигнала рассогласования между ракетой и линией визирования цели, последовательно соединенные звено с регулируемым временем запаздывания, суммирующий усилитель, модулятор и привод руля, а также блок выработки периодического по углу крена сигнала, выход которого соединен со вторым входом модулятора и входом измерителя периода, выход которого соединен с первым входом звена с регулируемым временем запаздывания, отличающаяся тем, что в нее введены последовательно соединенные звено с постоянным временем запаздывания, вход которого соединен с выходом формирователя сигнала рассогласования, и второй суммирующий усилитель, второй вход которого соединен с выходом формирователя сигнала рассогласования, а выход соединен со вторыми входами звена с регулируемым временем запаздывания и первого суммирующего усилителя.
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТЫ, СИСТЕМА НАВЕДЕНИЯ И ПОЗИЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2406962C2 |
| Система автоматического управления фрикционным сцеплением транспортной машины | 1990 |
|
SU1781098A1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2009 |
|
RU2402743C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА (ВАРИАНТЫ) | 2006 |
|
RU2326323C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2005 |
|
RU2284001C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2004 |
|
RU2274817C1 |

