Изобретение относится к области навигации и может использоваться при разработке и модернизации аппаратуры потребителей спутниковой радионавигационной системы (СРНС) НАВСТАР. СРНС НАВСТАР основана на передаче закодированных радиосигналов от спутников, находящихся на орбите Земли. Одиночный приемник таких сигналов позволяет определить свои абсолютные координаты. Система, состоящая из двух приемников, может быть использована для определения точных относительных координат, то есть координат одного приемника относительно другого.
Известен способ разрешения фазовых неоднозначностей, описанный в патенте RU 2157547 "Способ разрешения неоднозначностей фазовых измерений" [1].
Суть способа заключается в том, что измеряют фазы ϕ1 и ϕ2 на двух несущих частотах f1 и f2, синтезируют длину волны λ0=9λ1=λ2 и определяют, с использованием математического аппарата теории чисел, число периодов r1 и r2, а также длины волны λ1 и λ2, заключенных в синтезированной длине волны λ0.
Недостатком такого способа является то, что для его работы необходимо использовать двухчастотные GPS-приемники, которые являются весьма дорогостоящими по сравнению с одночастотными.
Патент US 5252982 "Method of precise position determination" описывает способ разрешения неоднозначностей, основанный на переборе комбинаций чисел неоднозначностей и оценке "невязки", соответствующей каждой из комбинации [2].
Недостатком данного способа является невысокая надежность, поскольку в результате работы способа в качестве истинной комбинации неоднозначностей может быть выбрана неверная, но очень похожая по значению оценки невязки комбинация.
Наиболее близким по технической сущности к предлагаемому решению является способ, описанный в патенте US 5359332 "Determination of phase ambiguities in satellite ranges" [3].
В данном патенте предлагается подход по разрешению фазовых неоднозначностей, состоящий из двух следующих этапов.
1) Антенны GPS-приемников располагают на маленьком расстоянии между собой (например, 30 см и менее) таким образом, что оно становится соизмеримым с длиной волны (˜19 см).
2) Антенну одного приемника перемещают относительно антенны другого таким образом, что вектор базы (соединяющий фазовые центры антенн приемников) поворачивается на 180°, то есть становится диаметрально противоположным к начальному состоянию. Тогда просуммировав разностные уравнения для двух положений антенн, появляется возможность избавиться от неизвестного вектора базы и разрешить неоднозначности. Перемещение антенн должно осуществляться так, чтобы не было срывов слежения по спутникам, измерения для которых используются в вычислениях. Это ограничение обусловлено тем, что при срыве слежения происходит изменение фазовой неоднозначности.
Недостатком данного способа является необходимость размещать антенны приемников близко к друг другу на первом этапе и производить механические манипуляции над положением антенн на втором этапе.
Цель предлагаемого изобретения - повышение точности определения координат фазового центра антенны одного приемника относительно фазового центра антенны другого приемника, а также повышение надежности и уменьшение времени инициализации.
Способ определения координат одного приемника относительно другого называется дифференциальным позиционированием, он обеспечивает гораздо более высокую точность по сравнению с абсолютным позиционированием - это обусловлено тем, что для определения относительных координат используются фазовые измерения, имеющие на порядок меньшую погрешность по сравнению с кодовыми измерениями, используемыми в абсолютном позиционировании.
Фазовое измерение - это разница фазы сигнала, принятого от спутника антенной приемника, и фазой внутреннего генератора приемника. Каждое такое измерение содержит целое число периодов волны λ плюс дробную часть периода f в диапазоне 0≤f≤1.
Главной проблемой в использовании фазовых измерений является неоднозначность фазового измерения, обусловленная наличием неизвестного целого числа периодов волны λ, поскольку приемник может определить только дробную часть. Именно поэтому фазовые неоднозначности (ФН) имеют целочисленный характер. Когда неоднозначности устранены, вектор базы может быть определен с точностью фазовых измерений (˜1 см).
Способ определения координат одного приемника относительно другого называется дифференциальным позиционированием, он обеспечивает гораздо более высокую точность по сравнению с абсолютным позиционированием - это обусловлено тем, что для определения относительных координат используются фазовые измерения, имеющие на порядок меньшую погрешность по сравнению с кодовыми измерениями, используемыми в абсолютном позиционировании.
Фазовое измерение - это разница фазы сигнала, принятого от спутника антенной приемника, и фазой внутреннего генератора приемника. Каждое такое измерение содержит целое число периодов волны λ плюс дробную часть периода f в диапазоне 0≤f≤1.
Главной проблемой в использовании фазовых измерений является неоднозначность фазового измерения, обусловленная наличием неизвестного целого числа периодов волны λ, поскольку приемник может определить только дробную часть. Именно поэтому фазовые неоднозначности (ФН) имеют целочисленный характер. Когда неоднозначности устранены, вектор базы (соединяющий фазовые центры антенн приемников) может быть определен с точностью фазовых измерений (˜1 см).
Предлагается способ разрешения фазовых неоднозначностей, при котором фазовые центры антенн одночастотных GPS-приемников на этапе инициализации системы фиксируют относительно друг друга таким образом, чтобы расстояние между ними сохранялось неизменным, для различных наборов спутников составляются множества потенциальных решений неоднозначностей, для каждого решения вычисляется вектор базы и определяется его длина, сравнивается с эталонным значением, измеренным заранее. Решения, которым соответствует вектор базы с ошибкой длины, превышающей порог, признаются ложными, также признаются ложными все из потенциальных решений, "подобные" данному решению (принцип подобия описывается ниже); составляется множество, являющееся объединением подмножеств оставшихся решений, статистически оцениваются невязки для всех решений из объединенного множества; решение, минимальное по величине дисперсии невязки, признается истинным.
В отличие от прототипа в предлагаемом способе не требуется размещать антенны близко друг к другу, а также перемещать их специальным образом.
На чертеже изображены антенны А и В приемников, вектор базы b, соединяющий антенны, первые фазовые разности Δϕ1 и Δϕ2 для спутников 1 и 2 соответственно, прямоугольная система координат и единичные векторы направлений на спутники - e1 и e2.
Предлагаемый способ разрешения фазовых неоднозначностей осуществляется в следующей последовательности.
На этапе инициализации системы происходит прием и накопление данных от двух приемников сигналов СРНС НАВСТАР, содержащих информацию о кодовых и фазовых измерениях, эфемеридную информацию, на основе которой можно вычислять координаты того или иного спутника, а также грубые абсолютные координаты антенн приемников. Минимальное необходимое число спутников, общих для обоих приемников, равно 5. Это обусловлено тем, что для формирования нескольких множеств потенциальных решений, которое обеспечивает более высокую надежность успешного разрешения ФН, необходимо иметь 4 пары спутников. На этапе инициализации антенны приемников фиксируют относительно друг друга таким образом, чтобы расстояние между их фазовыми центрами оставалось неизменным. Данное расстояние измеряют с сантиметровой точностью, оно необходимо для проверки той или иной комбинации целочисленных значений ФН (потенциальных решений). Длительность этапа инициализации зависит от конкретной для эпохи измерений геометрии спутников, физического места приема сигналов, определяющего уровень зашумления, а также качества работы используемых приемников сигналов СРНС. После завершения данного этапа, когда данные от GPS-приемников накоплены, требование по неизменности расстояния между антеннами становится необязательным. С помощью фильтра Калмана и фазовых измерений производится сглаживание кодовых измерений, которые используются для нахождения приблизительных значений ФН.
Следующим этапом является итерационный процесс разрешения фазовых неоднозначностей, который заключается в переборе и анализе различных комбинаций целых чисел, являющихся потенциальными решениями. Для формирования множества потенциальных решений используют следующую последовательность действий. Из всех наблюдаемых спутников произвольно выбирают 5, по которым велось непрерывное слежение, то есть не было срывов, и, следовательно, все фазовые неоднозначности для них оставались постоянными. Для этих 5 спутников формируют двойные (вторые) кодовые разности на основании кодовых измерений, сглаженных фильтром Калмана. Первые разности образуются путем вычитания измерений для двух приемников, вторые - путем вычитания первых разностей для различных спутников, образованных в пары. Для образования пар разностей один из спутников выбирают в качестве опорного, он будет присутствовать во всех парах. Таким образом, для 5 спутников будут образованы 4 пары. Так как кодовые измерения не содержат неоднозначости, это позволяет из следующего уравнения определить грубое значение вектора базы bPR:


где DDPR(1-4) - двойные (вторые) сглаженные кодовые разности для 4 пар спутников, Н - матрица единичных векторов направлений на спутники.
Вычислив грубое значение вектора базы, находят и фиксируют приблизительные целочисленные значения ФН  чтобы на их основе сформировать множество потенциальных решений.
чтобы на их основе сформировать множество потенциальных решений.
где [...] - оператор округления до ближайшего целого.
DDCP(1-4) - двойные фазовые разности (ДФР) для 4 пар спутников.
Множество потенциальных решений формируют таким образом, что только 3 из 4 чисел ФН являются независимыми, их называют "основными", четвертое число ФН, называемое "дополнительным", определяется с помощью основных. Данное множество представляет собой совокупность всех возможных комбинаций целых чисел {N1, N2, N3}, таких что:
где NO(i) - зафиксированное приблизительное целочисленное значение ФН для i-й пары спутников, k - целое число, определяющее диапазон поиска истинного решения, зависящего от конкретной для эпохи измерений геометрии спутников, физического места приема сигналов, определяющего уровень зашумления, а также качества работы используемых приемников сигналов СРНС.
Последовательно анализируют каждую комбинацию ФН из множества потенциальных решений. Для этого с помощью основных ДФР находят вектор базы bCP из уравнения:

С помощью вектора bCP находят значение дополнительной ФН:

С помощью полной комбинации ФН (основные + дополнительная ФН), то есть {N1, N2 N3 N4}T вычисляют уточненное значение вектора базы b:
Для оценки анализируемой комбинации ФН в качестве критерия истинности используется сравнение вычисленного значения модуля уточненного вектора базы с эталонным значением, заданным априори. Если ошибка модуля больше порогового значения, то данная комбинация ФН признается ложной. Для увеличения надежности определения истинного решения необходимо исключить все комбинации, подобные ложной. Комбинации считаются подобными, если у них совпадают хотя бы три числа ФН.
Для выявления комбинаций, подобных ложным, используется так называемый "список ложных комбинаций". Этот список изначально пуст. По мере анализа различных комбинаций ФН данный список может пополняться. Ложные комбинации ФН заносятся в данный список.
После проверки текущей комбинации ФН переходят к следующей и так далее, пока не проверят все из потенциальных решений, сформированных для данного варианта выбора основных и дополнительных пар спутников.
Если проверили все комбинации ФН из данного множества потенциальных решений, то смотрят, есть ли другие варианты выбора основных и дополнительных пар спутников. В случае, когда такие существуют, формируют другое множество потенциальных решений и аналогично предыдущему проверяют все комбинации ФН из этого множества.
В результате, имеют несколько множеств потенциальных решений. Исходя из предположения, что истинное решение лежит в области поиска, определяемой величиной целого числа k, и, следовательно, что каждое множество содержит истинное решение, находят объединение множеств, которое также будет содержать истинное решение.
С целью увеличения надежности определения истинного решения все комбинации из объединенного множества проверяют на предмет наличия подобных из списка ложных комбинаций. В случае, когда у проверяемого решения есть хотя бы одно подобное из списка ложных, такое решение удаляется из множества и далее не анализируется.
Производят статистическую оценку всех оставшихся решений. Для оценки по каждой комбинации формируют массив невязок для нескольких эпох измерений. Невязки определяются следующим образом.
Матрица Н замещается произведением QR, являющимся результатом QR-разложения [4, с.302] матрицы Н:

Подставив в уравнение (5) и домножив обе части на QT, получают:


Ранг матрицы R эквивалентен рангу матрицы Н, следовательно, нижняя строка матрицы R состоит из нулей.



где U состоит из первых трех строк матрицы R, Q1 состоит из первых трех строк матрицы QT, q - четвертая строка матрицы QT.
Т.к. DDCP содержит шумовую составляющую, то выражение (14) будет отлично от нуля, и эта разность и есть невязка:
Для оценки невязок находят их дисперсию для нескольких эпох измерений.
Комбинация ФН, которой соответствует наименьшее значение дисперсии невязок, является искомой. Зная истинную комбинацию ФН, вектор базы можно определить с точностью фазовых измерений.
В качестве примера рассмотрим последовательность разрешения ФН и высокоточного определения вектора базы с помощью двух одночастотных GPS-приемников. Антенны приемников были установлены на фиксированном расстоянии 2.28 м, порог ошибки модуля базы установлен 10 см. В течение 150 с от этих приемников принимались и накапливались данные: кодовые и фазовые измерения, эфемеридные данные спутников. Для построения двойных разностей были выбраны 5 спутников с номерами 7, 9, 18, 26, 28 и образованы следующие пары: 7-9, 7-18, 7-26, 7-28. С помощью фильтра Калмана и сглаженных кодовых измерений вычислены приблизительные целочисленные значения ФН: (-7 2 -6 -3). Зная, что для используемых приемников шум кодовых измерений составляет 3 м, и то, что длина волны составляет ˜19 см, был установлен диапазон поиска истинного решения k=16. Использованы различные варианты выбора основных и дополнительной пар спутников: {1, 2, 3} и {4}, {1, 2, 4} и {3}, {1, 3, 4} и {2}, {2, 3, 4} и {1}, получены 4 множества потенциальных решений. В каждом потенциальном решении с помощью основных значений ФН вычислено грубое значение вектора базы, на основе которого посчитано значение дополнительной ФН, с помощью полной комбинации ФН, состоящей из основных и дополнительного значений, вычислен уточненный вектор базы, модуль которого сравнивался с эталонным модулем 2.28 м, при превышении ошибки модуля порогового значения 10 см комбинация признавалась ложной и заносилась в список ложных комбинаций. Все потенциальные решения проверялись на наличие подобных из списка ложных, и при положительном результате проверки удалялись из множества. Далее было найдено объединение множеств потенциальных решений и статистическая оценка невязок для каждой комбинации ФН. В результате наименьшее значение дисперсии невязок имела комбинация ФН: (-10 0 -4 -1), которая и являлась истинной. На основе истинной комбинации ФН было вычислено значение вектора базы с точностью фазовых измерений.
Применение данного изобретения дает возможность высокоточного определения вектора, соединяющего фазовые центры антенн приемников, что может быть использовано, например, для определения угловой ориентации данного вектора.
Источники информации
1. Патент RU 2157547 "Способ разрешения неоднозначностей фазовых измерений".
2. Патент US 5252982 "Method of precise position determination".
3. Патент US 5359332 "Determination of phase ambiguities in satellite ranges" - прототип.
4. Van Graas, F. and M.Braasch (1991-92), "GPS Interferometric Attitude and Heading Determination: Initial Flight Test Results", NAVIGATION: Journal of the Institute of Navigation, Vol.38, No.4, Winter.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОКОТОЧНОГО ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2143123C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2010 |
|
RU2446410C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНОГО ПРИЕМНИКА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ (СРНС) | 2010 |
|
RU2432584C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ НА ОСНОВЕ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ GPS/GLONASS | 2009 |
|
RU2419103C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2015 |
|
RU2592077C1 |
| Способ определения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем | 2016 |
|
RU2624268C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАВИГАЦИОННОГО ПРИЕМНИКА | 2014 |
|
RU2567368C1 |
Изобретение относится к области навигации и может использоваться в аппаратуре потребителей спутниковой радионавигационной системы (СРНС) НАВСТАР. Технический результат заключается в высокоточном определении координат фазового центра антенны одного приемника относительно фазового центра антенны другого приемника, что позволяет определить относительные координаты вектора, соединяющего две антенны, и, как следствие, угловую ориентацию данного вектора. Для этого на этапе инициализации системы антенны фиксируют таким образом, чтобы расстояние между ними в течение инициализации не менялось, формируют множества потенциальных решений фазовых неоднозначностей для различного выбора пар спутников, строят двойные фазовые разности, отбрасывают все ложные решения по критерию ошибки модуля вектора базы, находят объединение множеств потенциальных решений и выбирают истинное решение по малости дисперсии невязок. 1 ил.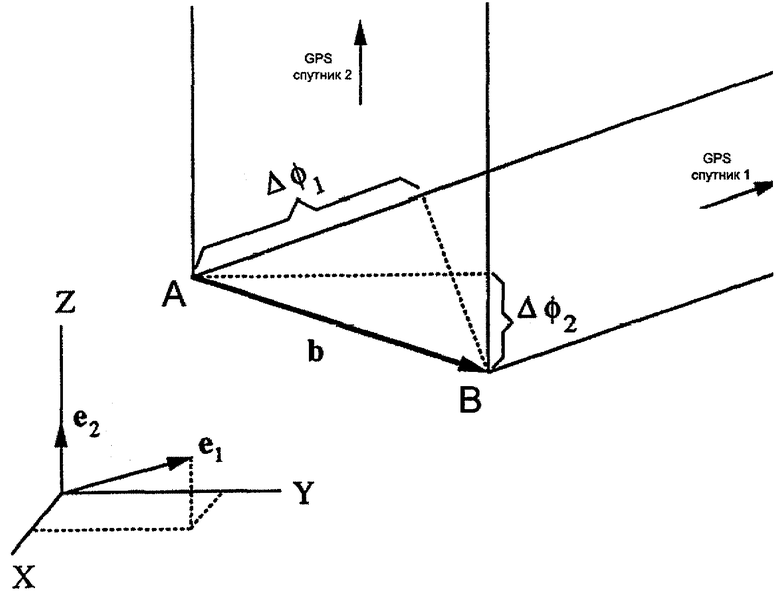
Способ разрешения фазовых неоднозначностей, включающий измерение фазы сигналов спутниковой радионавигационной системы НАВСТАР, принимаемых двумя одночастотными GPS-приемниками, формирование двойных фазовых разностей, отличающийся тем, что на начальном этапе антенны приемников фиксируют относительно друг друга таким образом, чтобы расстояние между их фазовыми центрами было постоянным и принимают данное значение в качестве эталонного, после формирования двойных фазовых разностей с помощью кодовых измерений, сглаженных фильтром Калмана, находят приблизительное значение фазовых неоднозначностей, на основе которых для различного выбора пар спутников составляют несколько множеств потенциальных решений, являющихся совокупностью всех возможных комбинаций целых чисел в диапазоне, определяемом шумом кодовых измерений, для каждой комбинации фазовых неоднозначностей вычисляют значение вектора между фазовыми центрами антенн приемников, сравнивают модуль данного вектора с его эталонным значением, измеренным заранее, в случае, когда ошибка модуля превышает допустимую, данную комбинацию признают ложной, а также признают ложными все комбинации, у которых хотя бы три числа неоднозначностей совпадают с числами из данной комбинации, такие комбинации удаляют из множества потенциальных решений, составляют объединение множеств потенциальных решений, вычисляют дисперсию невязок для каждой комбинации фазовых неоднозначностей из объединенного множества, в качестве истинного решения выбирают комбинацию фазовых неоднозначностей с наименьшим значением дисперсии невязок.
| US 5359332 А, 25.10.1994 | |||
| СПОСОБ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ФАЗОВЫХ ИЗМЕРЕНИЙ В СИСТЕМЕ GPS | 2000 |
|
RU2213979C2 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ПО ПСЕВДОДАЛЬНОСТИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ (ГСП) | 2000 |
|
RU2253127C2 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ЭЛЕКТРОННОЙ | 0 |
|
SU194974A1 |
| US 2004235497 А1, 25.11.2004 | |||
| WO 2004057362 А2, 08.07.2004. | |||

