Настоящее изобретение относится к области спутниковой радионавигации, конкретно к способам определения координат навигационного приемника Спутниковой Радионавигационной Системы (СРНС). В мире существуют или создаются несколько СРНС. Это действующие системы Global Positioning System GPS (США), Глобальная Навигационная Система Глонасс (Российская Федерация) и создаваемые Galileo (Европейское Космическое Агенство ESA), BeiDou или Compass (КНР). Настоящее изобретение может быть использовано в навигационных приемниках всех этих или других СРНС.
Навигационные приемники СРНС принимают радиосигналы космических аппаратов СРНС, производят измерения параметров этих сигналов - псевдодальности и доплеровского сдвига частоты этих сигналов. Терминологически вместо доплеровского сдвига частоты часто используют понятие псевдоскорости, отличающееся от первого лишь постоянным коэффициентом. Измерение псевдодальности производится путем определения фазы принимаемой поднесущей радиосигнала, представляющей собой псевдослучайную последовательность (или PRN-код), наложенную на несущее колебание радиочастоты с помощью фазовой манипуляции. В СРНС GPS, например, в качестве такой дальномерной поднесущей использованы коды Голда с периодом 1 миллисекунда и частотой следования символов кода, равной 1.023 МГц. В СРНС Глонасс в качестве дальномерной поднесущей используется последовательность максимальной длины (М-последовательность) также с периодом 1 миллисекунда (мс), но с частотой следования символов кода, равной 511 кГц.
Кроме этого, в сигналах СРНС с борта космических аппаратов (КА) передается служебная информация о местоположении КА и информация о частоте опорного генератора и шкале времени КА (эфемеридная информация). Служебная информация в сигналах передается с помощью фазовой манипуляции с частотой следования битов данных, например, в СРНС GPS и Глонасс, равной 50 Гц (бит в секунду). Смысловые слова служебной информации упорядочены в некоторых регулярно повторяемых форматах данных.
В СРНС GPS формат данных - это «слова» (word - длительность 0.6 секунды), «субфреймы» (sub-frame - 10 слов, длительность 6 секунд), «фреймы» (frame - длительность 30 секунд), «супер-фрейм» (super-frame - длительность 12.5 минут). Первое слово каждого суб-фрейма содержит HOW (Handover Word), включающее в себя TOW (Time of Week - время внутри недели), позволяющее определить в приемнике время с точностью, необходимой для привязки к нему измерений псевдодальности и доплеровского сдвига частоты. Первый, второй и третий суб-фреймы каждого фрейма содержат эфемеридную информацию.
В СРНС Глонасс регулярно повторяемый формат данных включает в себя строки (длительность 2 секунды), кадры (длительность 30 секунд) и суперкадр (длительность 2.5 минуты). Эфемеридная информация размещается в четырех первых строках каждого кадра данных СРНС Глонасс. В строке размещаются несколько параметров эфемеридной информации. Информация о времени содержится в параметре tk, расположенном в первой строке каждого кадра.
Прием служебной информации в приемнике СРНС начинается с установления синхронизации с границами битов данных. Действительно синхронизация с PRN-кодом определяет время прихода сигнала внутри периода этого кода (обычно 1 миллисекунда), но не дает знания границ битов данных, имеющих длительность 20 миллисекунд, соответствующую скорости передачи данных 50 бит/секунду. После достижения битовой синхронизации приемник приступает к приему битов данных, проверке правильности приема с помощью содержащихся в составе данных проверочных разрядов помехоустойчивого кодирования и далее к выделению (декодированию) элементов сообщения (в GPS: слов, суб-фреймов, фреймов, супер-фрейма).
Космические аппараты СРНС имеют высоту орбит около 20000 км над поверхностью Земли. Соответственно, типичное время распространения сигналов составляет, примерно, от 60 до 80 миллисекунд. Таким образом, полная (однозначная) псевдодальность должна измеряться в пределах до 80 миллисекунд. После синхронизации с PRN-кодом в результате обнаружения сигнала СРНС и установления слежения за фазой PRN-кода, в приемнике получают неполные (неоднозначные) измерения псевдодальности по модулю 1 миллисекунд. Это означает, что измеренная псевдодальность является точной в своей одномиллисекундной части, но не содержит неизвестного целого числа 1-миллисекундных интервалов, которые необходимо добавить к неполной псевдодальности для ее полного представления. Таким образом, после начального этапа синхронизации с сигналами СРНС (GPS, Глонасс) доступными в приемнике являются 1-миллисекундные псевдодальности.
Достижение синхронизации с битами данных служебной информации, передаваемой в сигналах СРНС (GPS, Глонасс), позволяет расширить интервал однозначного представления измеряемых псевдодальностей до 20 миллисекунд. В этом случае говорят о доступности в приемнике 20-миллисекундных псевдодальностей.
Полные псевдодальности измеряются в приемнике СРНС после приема временной информации (TOW в GPS или tk в Глонасс) из состава служебной информации хотя бы одного из КА СРНС.
Для достижения битовой синхронизации и приема временной информации, обеспечивающих измерение полных псевдодальностей должно быть затрачено некоторое время, зависящее от особенностей построения приемника СРНС и условий приема сигналов. Ориентировочно затраты времени для достижения битовой синхронизации могут составлять от долей секунды до единиц секунд. Временная информация (TOW в GPS или tk в Глонасс) имеют период повторяемости, равный тридцати секундам. С учетом случайности момента начала приема и, как правило, наличия в приемнике дополнительных проверок достоверности приема данных ориентировочно можно говорить о затратах от 10 до 40 секунд на прием временной информации даже в условиях незатрудненого распространения сигналов СРНС (сильные сигналы).
В условиях затрудненого распространения сигналов СРНС, например в помещении или среди плотной городской застройки, снижение отношения сигнал/шум может приводить к дальнейшему многократному росту затрат времени на получение измерений полных псевдодальностей или даже к невозможности получения таковых. В то же время зачастую при этом неполные псевдодальности могут измеряться приемником и по слабым сигналам, а эфемеридная информация о положении КА СРНС может быть доступна из альтернативных источников. Например, в приемник СРНС, предназначенный для отслеживания перемещения грузов, эфемеридная информация может быть заранее записана на все время предстоящей экспедиции. Другим примером может служить получающая все большее распространение практика долговременного прогноза эфемерид (на несколько суток) внутри приемника СРНС.
Таким образом, актуальна задача местоопределения в приемнике СРНС по неполным псевдодальностям.
Известен способ решения данной задачи, описанный в Патенте США No 7535414, который предполагает, что перед вычислением координат навигационного приемника производится разрешение неопределенностей в неполных псевдодальностях путем их включения в вектор оцениваемых параметров, причем для начальной оценки координат навигационного приемника и величины неопределенности в псевдодальности специально выбранного опорного спутника используются измерения псевдоскорости. Фиксация целочисленных неопределенностей псевдодальностей происходит только при достижении определенной точности их вычисления. К недостаткам данного способа можно отнести высокую вычислительную сложность, необходимость образования дополнительных комбинаций измерений - разностей псевдодальностей, большую размерность матриц, участвующих в вычислениях, и большую вероятность того, что для разрешения неопределенности в неполных псевдодальностях потребуется более чем один набор одномоментных измерений, что может привести к увеличению времени до получения первого определения координат приемника СРНС. Все это приводит к существенному усложнению данного способа по сравнению с классическим способом определения координат приемника СРНС по полным псевдодальностям.
В качестве альтернативы методу, описанному выше, Патент США No 6417801 предлагает разрешение неопределенностей в неполных псевдодальностях путем добавления в вектор оцениваемых параметров поправки ко времени измерения, перебор всех допустимых целочисленных комбинаций неоднозначностей и выбор нужной из них по критерию минимальности остаточных невязок. Однако данный метод, несмотря на простоту реализации вычислений, также имеет существенные недостатки. Это либо необходимость получения информации о достаточно точных начальных координатах приемника СРНС, например от станции мобильной связи, что требует усложнения приемника СРНС за счет необходимости реализации канала приема этих данных, либо необходимость длительного перебора с целью нахождения такого набора начальных координат при котором данный метод позволяет решить задачу определения координат приемника СРНС. Такой перебор включает в себя вычисление модельных псевдодальностей по некоторой сетке возможных начальных приближений к истинным координатам приемника СРНС, что является наиболее ресурсоемким процессом в определении координат в приемнике по сигналам СРНС.
Наиболее близким к предлагаемому изобретению среди известных является способ, описанный в Патенте США No 7535414.
Задачей, на решение которой направлено данное изобретение, является расширение арсенала средств, а именно создание нового способа сверхбыстрого высокоточного определения координат в приемнике СРНС, который не имеет отмеченных выше недостатков известных аналогов, то есть не требует дополнительной внешней информации, длительного перебора неоднозначностей псевдодальномерных измерений и существенного усложнения вычислительной схемы по сравнению с определением координат по полным псевдодальностям.
Достигаемым техническим результатом является возможность определения координат приемника СРНС в те моменты времени, когда выделение временной коррекции из сигналов космических аппаратов еще невозможна и, как следствие, отсутствует точная временная привязка измерений к шкале времени СРНС, а сами измерения псевдодальности являются неполными, то есть могут быть сделаны только по модулю 1 или 20 миллисекунд.
Поставленная задача решается следующим образом.
Способ определения координат мобильного приемника спутниковой радионавигационной системы (СРНС) заключается в том, что приемник принимает и обрабатывает сигналы космических аппаратов, по результатам этой обработки производят измерения псевдодальностей и псевдоскоростей и выделяют эфемеридную информацию, а по результатам измерений определяют координаты приемника СРНС по измерениям псевдодальностей согласно следующим этапам:
- на первом этапе вычисляют модуль неоднозначности N из ошибок δ начальных координат приемника СРНС следующим образом: N равно 1 миллисекунде, для значений δ меньше 150 км, и N равно 20 миллисекундам, для значений δ в интервале от 150 до 3000 км,
- на втором этапе выполняют подсчет псевдодальностей с модулем неоднозначности, большим или равным N,
и в случае если таких псевдодальностей не достаточно для вычисления координат приемника СРНС, уточняют начальные координаты по измерениям псевдоскоростей, и если уточнение не состоялось, то снова производят измерения псевдодальностей и псевдоскоростей и выделяют эфемеридную информацию, а если уточнение состоялось, то возвращаются на этап 1, при этом этапы 1, 2 исполняются циклически до тех пор, пока не становится возможным вычисление координат приемника СРНС по псевдодальностям с модулем неоднозначности, большим или равным N, после чего на основании полученных начальных координат приемника СРНС, начального приближения для времени измерений и эфемеридной информации переходят непосредственно к итерационному процессу вычисления координат приемника СРНС по измерениям псевдодальностей согласно следующим этапам:
- на третьем этапе вычисляют модельные значения псевдодальностей, невязки псевдодальностей, определяемые как разность псевдодальностей и их вычисленных модельных значений по модулю N миллисекунд, а также матрицу производных по уточняемым параметрам,
- на четвертом этапе осуществляют минимизацию невязок путем добавления или вычитания N миллисекунд к их вычисленным значениям.
Затем переходят к итерационному процессу вычислений координат приемника СРНС по измерениям псевдодальностей, включающему следующие этапы:
- пятый этап, на котором осуществляют вычисление поправок к координатам приемника СРНС по всем возможным в пределах модуля неоднозначности N комбинациям невязок псевдодальностей и матрице производных по уточняемым параметрам, а также находят минимальную из этих поправок,
- шестой этап, на котором осуществляют вычисление поправок к координатам приемника СРНС по невязкам псевдодальностей и матрице производных по уточняемым параметрам,
- седьмой этап, на котором осуществляют добавление поправок к координатам приемника СРНС,
при этом на первой итерации после этапа 4 переходят на этап 5 и далее на этап 7, а на последующих итерациях после этапа 4 переходят на этап 6, далее на этап 7 и, в случае если поправки к координатам приемника СРНС становятся настолько малы, чтобы обеспечить заданную точность вычисления координат приемника СРНС, итерации прерывают, в противном случае снова переходят к этапу 3 и проводят следующие итерации, а за оценку координат мобильного приемника СРНС принимают те координаты, которые были получены во время последней выполненной итерации.
Заявленный способ иллюстрируется следующими Фигурами чертежей:
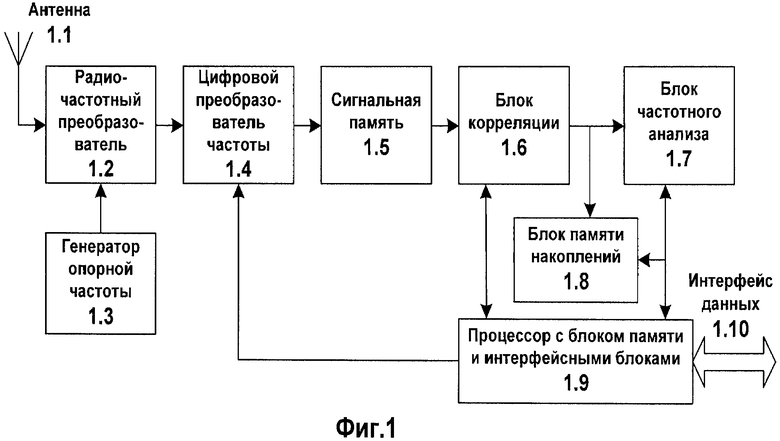
На Фиг.1 представлена блок-схема приемника СРНС.
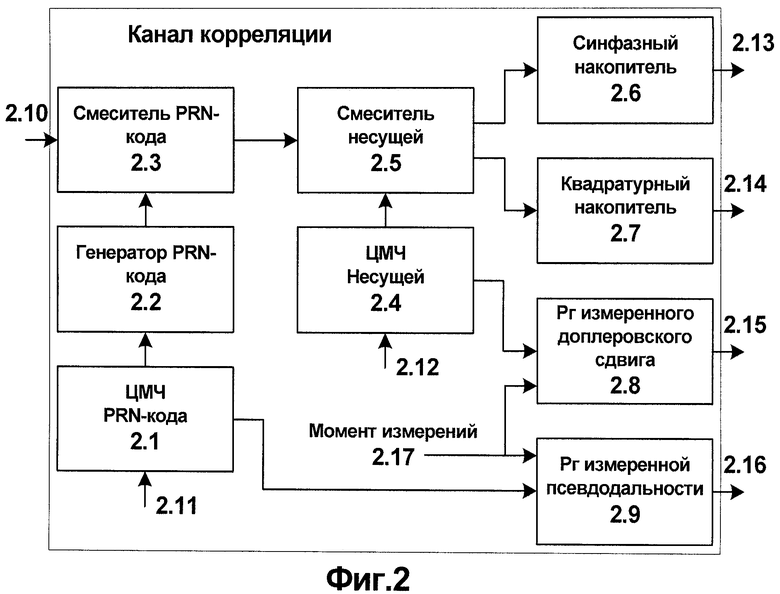
На Фиг.2 представлена блок-схема канала корреляции приемника СРНС.
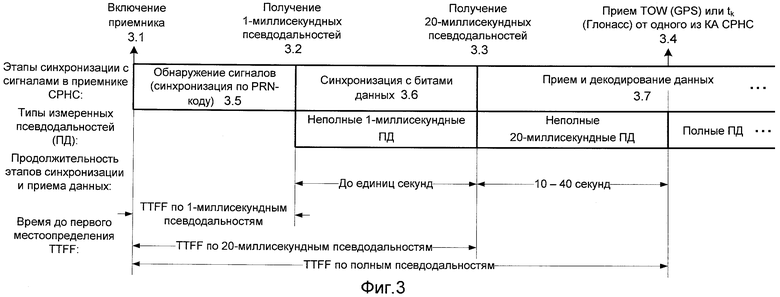
На Фиг.3 представлена обобщенная временная диаграмма работы приемника СРНС, характеризующая составляющие времени TTFF (Time-to-First Fix) первого определения координат в приемнике СРНС.
На Фиг.4 приведена диаграмма потоков данных в одной из возможных реализаций предлагаемого способа в приемнике СРНС.
На Фиг.5 приведена блок-схема, описывающая последовательность операций и логику функционирования предлагаемого способа.
Предпочтительный вариант реализации предлагаемого изобретения иллюстрируется на примере функционирования приемника СРНС, блок-схема которого приведена на Фиг.1. Радиочастотный преобразователь 1.2 усиливает, переносит на промежуточную частоту, селектирует и оцифровывает, то есть преобразует в последовательность цифровых отсчетов, сигналы КА СРНС, улавливаемые антенной 1.1. При этом радиочастотный преобразователь 1.2 использует сигнал генератора опорной частоты 1.3, служащий также для формирования шкалы времени приемника СРНС. Цифровой преобразователь частоты 1.4, управляемый процессором 1.9, переносит отсчеты сигналов СРНС на нулевую частоту и в общем случае производит их дополнительную обработку, например режектирование помех, изменение частоты дискретизации (например, децимацию отсчетов), дополнительную цифровую фильтрацию. Полученные отсчеты сигналов СРНС на нулевой частоте помещаются для хранения в сигнальную память 1.5. Частота записи отсчетов в сигнальную память 1.5 должна быть согласована с шириной полосы селектированных сигналов и удовлетворять общепринятому требованию Найквиста. Так, для сигналов GPS, имеющих частоту следования символов PRN-кода, близкую к 1 МГц, частота взятия цифровых комплексных отсчетов сигнала не должна быть менее 2 МГц. Из сигнальной памяти 1.5 отсчеты сигналов считываются в блок корреляции 1.6 с частотой, более высокой, чем частота записи в сигнальную память 1.5. Этим достигается ускорение получения большого количества корреляционных накоплений для различных гипотез о параметрах принимаемых сигналов, что требуется для эффективной обработки слабых сигналов СРНС. Корреляционные накопления, получаемые в блоке корреляции 1.6, хранятся в блоке 1.8 памяти накоплений. Далее блок 1.7 частотного анализа производит преобразование последовательных корреляционных накоплений в спектры мощности сигналов. В предпочтительном варианте реализации предлагаемого изобретения для этого блок 1.7 частотного анализа использует быстрое преобразование Фурье (БПФ). В качестве одного из примеров реализации блока 1.7 частотного анализа в предлагаемом изобретении может быть использовано БПФ размерности 64. Промежуточное хранение спектров мощности сигналов осуществляется в блоке 1.8 памяти накоплений. Управление работой приемника СРНС и выполнение многочисленных алгоритмических и расчетных действий производится в блоке 1.9, содержащем процессор, блок памяти программ и данных. В том же блоке 1.9 находятся и интерфейсные устройства, обеспечивающие внешний информационный обмен по шине 1.10 интерфейса данных.
Блок корреляции 1.6 в одном из возможных вариантов реализации приемника СРНС представляет собой множество параллельных корреляторов. Пример реализации канала корреляции представлен на Фиг.2. На вход смесителя 2.3 PRN-кода подаются отсчеты сигналов 2.10, считываемые из сигнальной памяти 1.5. Цифровые модуляторы частоты (ЦМЧ) PRN-кода 2.1 и ЦМЧ несущей 2.4, по сигналам управления 2.11 и 2.12, представляющим частоту и фазу опорных сигналов, выдаваемым процессором 1.9, производят цифровые сигналы, которые подаются, в первом случае, через генератор PRN-кода 2.2 на смеситель PRN-кода 2.3 и, во втором случае, напрямую - на смеситель несущей 2.5 соответственно. При этом выход смесителя 2.3 PRN-кода соединен со вторым входом смесителя несущей 2.5. Результаты комплексного перемножения в смесителе несущей 2.5 поступают на синфазный накопитель 2.6 и квадратурный накопитель 2.7, на которых и образуются статистики коррелятора (накопления) 2.13 и 2.14. Текущие значения ЦМЧ PRN-кода 2.1 и ЦМЧ несущей 2.4 по сигналу 2.17 «момент измерений» фиксируются в регистре 2.8 измеренного доплеровского сдвига частоты несущей и регистре 2.9 измеренной псевдодальности, на выходе которых имеем соответственно доплеровский сдвиг частоты несущей или пропорциональную ему псевдоскорость 2.15 и псевдодальность 2.16. При этом псевдодальность 2.16 представляет собой неполную псевдодальность по модулю 1 миллисекунда. Синхронизация с границами битов данных и декодирование служебной информации производится по статистикам коррелятора (накоплениям) 2.13 и 2.14. Прием и хранение эфемеридной информации осуществляется процессором 1.9.
Этапы синхронизации с сигналами СРНС в приемнике иллюстрируются временными диаграммами на Фиг.3. На шкале времени на Фиг.3, начиная от момента включения 3.1 приемника, показаны следующие этапы: 3.5 - этап обнаружения сигнала КА (синхронизации по PRN-коду), 3.6 - этап синхронизации с битами данных, 3.7 - этап приема и декодирования данных.
Во время этапа 3.6 синхронизации с битами данных некоторого КА доступны неполные псевдодальности, то есть 1-миллисекундные измерения псевдодальности по этому КА. Во время этапа 3.7 приема и декодирования данных некоторого КА, то есть после события 3.3 и до события 3.4, доступны 20-миллисекундные псевдодальности по этому КА, а после события 3.4 - полные псевдодальности по этому КА. При достаточном количестве неполных измерений по сигналам КА СРНС и наличии эфемеридной информации для этих КА способом согласно предлагаемому изобретению возможно получить навигационное местоопределение, не дожидаясь получения полных псевдодальностей.
Время от включения приемника до первого определения координат (TTFF - Time-to-First Fix) по полным псевдодальностям, то есть после события 3.4 приема TOW (GPS) или tk (Глонасс) от одного из КА СРНС, как это видно из временной диаграммы на Фиг.3, включает в себя время синхронизации с битами данных (3.6), которое может достигать единиц секунд, и время приема и декодирования данных (информации о времени СРНС) хотя бы от одного из КА, которое может составлять, например, от 10 до 40 секунд. С другой стороны, TTFF по 1-миллисекундным псевдодальностям определяется временем до соответствующего события 3.2. Если учесть, что время обнаружения сигналов (синхронизации по PRN-коду - этап 3.5) в современных приемниках СРНС может быть весьма малым, например, в зависимости от силы сигналов и качества априорной информации о местоположении и времени в приемнике, от долей до первых единиц секунд, то становится понятно, что использование для определения координат неполных псевдодальностей по сравнению с использованием полных псевдодальностей, может сократить время TTFF до первого местоопределения в несколько раз.
Существо предлагаемого способа может быть описано следующим образом со ссылками на диаграмму потоков данных Фиг.4. Измерение 4.1 псевдоскоростей (4.8) осуществляется масштабированием в процессоре 1.9 измеренного в блоке 1.6 корреляции доплеровского сдвига частоты несущей 2.15. Измерение 4.2 псевдодальностей (4.9) осуществляется процессором 1.9 на основании 1-миллисекундных псевдодальностей, получаемых из блока 1.6 корреляции и информации о синхронизации с битами данных, получаемой на этапе 3.6, и TOW (GPS) или tk (Глонасс), получаемых на этапе 3.7 приема и декодирования данных. В результате получаются 1-миллисекундные, 20-миллисекундные или полные псевдодальности. Отметим, что в состав измерений как псевдоскоростей, так и псевдодальностей обязательно включают и момент в шкале времени приемника СРНС, к которому эти измерения относятся, называемый далее время измерения. Затем из псевдодальностей 4.9 в зависимости от ошибок априорных значений 4.14 координат и времени производится отбор 4.15 псевдодальностей.
Из блока 4.3 (обеспечение эфемеридной информацией) эфемеридная информация 4.10 поступает в блок 4.4 уточнения начальных координат по измерениям псевдоскоростей, а также в блок 4.5 вычисления невязок псевдодальностей. Эфемеридная информация 4.10 получается на этапе 3.7 приема и декодирования данных или становится доступной из альтернативных источников. Например, в приемник СРНС, предназначенный для отслеживания перемещения грузов, эфемеридная информация может быть заранее записана на все время предстоящей экспедиции. Другим примером может служить получающая все большее распространение практика долговременного прогноза эфемерид (на несколько суток) внутри приемника СРНС.
По измерениям 4.8 псевдоскоростей, эфемеридной информации 4.10 и априорным значениям 4.14 координат и времени в блоке 4.4 уточнения начальных координат по измерениям псевдоскоростей вычисляется более точное начальное приближение координат и времени 4.11, сохраняемое далее в блоке 4.7.
Вычисление 4.5 невязок псевдодальностей выполняется для отобранных псевдодальностей 4.16 по уточненому в блоке 4.4 начальному приближению координат и времени 4.11 с привлечением эфемеридной информации 4.10.
По невязкам 4.12 из блока 4.5 в блоке 4.6 вычисляются поправки 4.13 к координатам и времени. В блоке 4.7 введения поправок в координаты и время и хранения координат и времени производится вычисление и сохранение значений координат приемника СРНС и корректировка его шкалы времени.
Этапы осуществления способа иллюстрируются блок-схемой, представленной на Фиг.5.
Как описано выше, приемник СРНС принимает и обрабатывает сигналы КА. При этом измеряются 1-миллисекундные, 20-миллисекундные или полные псевдодальности, псевдоскорости и обеспечивается эфемеридная информация для КА СРНС. В приемнике СРНС, как правило, имеется информация об априорных значениях 4.14, кординат и времени. Обычно она сопровождается некоторой оценкой ошибки δ координат.
По сигналам, принятым от L космических аппаратов, в блоке 5.1 производятся измерения L псевдодальностей, L псевдоскоростей и обеспечивается эфемеридная информация.
В блоке 5.2 вычисления модуля неоднозначности N (миллисекунд) из ошибок 6 координат производятся следующим образом: N=1 для δ<150 км и N=20 для 150≤δ≤3000 км.
В блоке 5.3 выполняется подсчет числа М псевдодальностей с модулем неоднозначности больше или равно N. Логический блок 5.4 проверяет достаточность количества М псевдодальностей для вычисления координат.
Блок 5.5 уточняет начальные координаты по измерениям псевдоскоростей с использованием следующего вектора поправок ΔD:

где:  ,
,  ,
,  - поправки к начальным координатам;
- поправки к начальным координатам;
 - поправки к начальным скоростям;
- поправки к начальным скоростям;
ΔF - поправка к частоте опорного генератора 1.3;
t - время;
ΔT - поправка ко времени измерений.
Уравнения для вычисления ΔD в блоке 5.5 могут быть представлены в следующем виде:

где:  - вектор разностей измеренных псевдоскоростей и их модельных значений, имеющий размерность L;
- вектор разностей измеренных псевдоскоростей и их модельных значений, имеющий размерность L;
G - матрица производных по уточняемым параметрам, L строк которой имеют следующий вид 
Ri - модельное расстояние до i-того КА; i=1, …, L;
x, y, z - начальные координаты.
Для вычисления вектора  разностей измеренных псевдоскоростей и их модельных значений и матрицы производных G в блоке 5.5 используются эфемеридная информация из блока 5.1. Поправки ΔD добавляются к начальным координатам в ходе нескольких итераций внутри блока 5.5, которые прерываются, когда поправки к начальным координатам ΔD становятся достаточно малы, чтобы обеспечить требуемую точность определения начальных координат, например меньше одного километра. Ошибка δ определения начальных координат по измерениям псевдоскоростей обычно существенно меньше 150 км.
разностей измеренных псевдоскоростей и их модельных значений и матрицы производных G в блоке 5.5 используются эфемеридная информация из блока 5.1. Поправки ΔD добавляются к начальным координатам в ходе нескольких итераций внутри блока 5.5, которые прерываются, когда поправки к начальным координатам ΔD становятся достаточно малы, чтобы обеспечить требуемую точность определения начальных координат, например меньше одного километра. Ошибка δ определения начальных координат по измерениям псевдоскоростей обычно существенно меньше 150 км.
Решение уравнения (2) с уменьшением ошибки δ координат и, соответственно, уточнение начальных координат в блоке 5.5 может состояться или не состояться, что проверяется логическим блоком 5.6. Блоки 5.1, 5.2, 5.3, 5.5 и 5.6 исполняются циклически до тех пор, пока проверка в логическом блоке 5.4 не позволит перейти к вычислению координат по М псевдодальностям.
На следующем этапе на основании начальных координат, начального приближения для времени измерений и эфемеридной информации из блока 5.1 в блоке 5.7 вычисляются модельные значения псевдодальностей, матрица производных Н, которая будет определена ниже, а также невязки псевдодальностей ΔRj(j=1, …, M), которые равны разности псевдодальностей и их вычисленных модельных значений по модулю N миллисекунд. Поскольку ошибка δ координат меньше N/2*с км (с-скорость света, N/2*c равно 150 км при N=1 и 3000 км при N=20), отклонения ΔRj от их среднего значения должны быть менее N/2 миллисекунд. Если какая-либо из ΔRj оказывается больше, чем N/2 миллисекунд, то в блоке 5.8 из этой невязки вычитается N миллисекунд. Если какая-либо из ΔRj оказывается меньше, чем -N/2 миллисекунд, то к этой невязке добавляется N миллисекунд. Минимизированные таким образом ΔR являются выходом блока 5.8.
Так как любая из невязок может иметь неоднозначность, равную ±N миллисекунд, то весь возможный набор ΔRj, ΔRj+N, ΔRj-N может использоваться при последующей обработке).
Вычисление координат приемника по измерениям псевдодальностей производится с использованием вектора поправок ΔP
ΔP=(Δx, Δy, Δz, Δt, ΔT).
Система уравнений для нахождения поправок ΔP может быть представлена в виде:

где: H - матрица производных по уточняемым параметрам, вычисляемая в блоке 5.7,
М строк которой имеют следующий вид  j=1, …, M;
j=1, …, M;
Δt - поправка к шкале времени приемника СРНС.
Для решения данной системы уравнений используется итерационный процесс, управляемый логическим условием 5.13, причем во время первой итерации, выявляемой с помощью логического блока 5.9, в блоке 5.10 вычисляются все возможные вектора поправок ΔP для всех комбинаций невязок ΔRj, ΔRj+N, ΔRj-N псевдодальностей и матрицы производных Н. Минимальная из поправок ΔP, выбранная из множества ΔRj, ΔRj+N, ΔRj-N невязок псевдодальностей является выходом блока 5.10 и служит для введения поправок ΔP в координаты и время в блоке 5.12. Во время всех остальных итераций, кроме первой, вектор поправок Δр вычисляется в блоке 5.11 из вектора невязок ΔR и матрицы производных Н. Блоки 5.7-5.12 исполняется циклически до тех пор, пока проверка в логическом блоке 5.13 не покажет, что поправки ΔP не стали достаточно малы, чтобы обеспечить требуемую точность вычисления координат. Например, можно потребовать, чтобы поправки к координатам были меньше 0.1 метра.
Выходом блока 5.14 являются координаты приемника СРНС.
Таким образом, предлагаемый способ позволяет решить задачу определения координат приемника СРНС, не дожидаясь получения полных псевдодальностей по неполным псевдодальностям на основании более простого решения по сравнению со способом, изложенным в Патенте США No 7535414. Упрощение происходит за счет следующих факторов: включение в вектор ΔP параметра ΔT, который позволяет отказаться от введения опорного КА и образования дополнительных комбинаций измерений - разностей псевдодальностей, а также от определения величины неопределенности в неполной псевдодальности опорного КА при уточнении координат приемника СРНС по измерениям псевдоскоростей; критерий минимизации поправок ΔP к начальным координатам, основанный на минимальном переборе невязок ΔRj, ΔRj+N, ΔRj-N дает возможность отказаться от включения в вектор ΔP величин неоднозначностей неполных псевдодальностей, что позволяет уменьшить размерность участвующих в вычислениях матриц и повысить вероятность определения координат приемника СРНС по одному набору одномоментных измерений неполных псевдодальностей.
Применение блока 5.5 уточнения начальных координат по измерениям псевдоскоростей, а также критерия минимизации поправок к начальным координатам вместо критерия минимизации невязок псевдодальностей позволяет существенно сократить объем вычислений, необходимый для решения задачи, по сравнению со способом, изложенным в Патенте США No 6417801. Основное сокращение вычислений происходит за счет того, что устраняется необходимость в вычислении модельных псевдодальностей по сетке начальных приближений к координатам, что является наиболее ресурсоемким процессом в общепринятом способе определения координат приемника СРНС. Способ обеспечивает возможность определения координат приемника СРНС в те моменты времени, когда выделение временной коррекции из сигналов космических аппаратов еще невозможна и, как следствие, отсутствует точная временная привязка измерений к шкале времени СРНС, а сами измерения псевдодальности являются неполными, то есть могут быть сделаны только по модулю 1 или 20 миллисекунд.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ОБЪЕДИНЕННОГО ИСПОЛЬЗОВАНИЯ ЛОКАЛЬНОЙ СИСТЕМЫ КРРВ (КИНЕМАТИЧЕСКОГО РЕЖИМА В РЕАЛЬНОМ ВРЕМЕНИ) И РЕГИОНАЛЬНОЙ, ШИРОКОЗОННОЙ ИЛИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ ПО ФАЗЕ НЕСУЩЕЙ | 2004 |
|
RU2363013C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2015 |
|
RU2592077C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ПО ПСЕВДОДАЛЬНОСТИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ (ГСП) | 2000 |
|
RU2253127C2 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2010 |
|
RU2446410C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2584541C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2587666C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОТРЕБИТЕЛЯ В СИСТЕМАХ ГЛОНАСС/GPS И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2486544C2 |

Изобретение относится к способам навигации по Спутниковым Радионавигационным Системам (СРНС), и может быть использовано для определения координат навигационного приемника. Технический результат заключается в обеспечении возможности определения координат мобильного приемника СРНС в те моменты времени, когда выделение временной коррекции из сигналов космических аппаратов еще невозможно. Для этого приемник СРНС принимает и обрабатывает сигналы космических аппаратов (КА), по результатам обработки сигналов КА измеряют псевдоскорости и неполные псевдодальности и выделяют эфемеридную информацию, на основании начальных координат приемника СРНС, вычисленных по измерениям псевдоскоростей с точностью, которая позволяет минимизировать неоднозначности неполных псевдодальностей, начального приближения для времени измерений и эфемеридной информации переходят к итерационному процессу вычисления координат приемника СРНС по измерениям неполных псевдодальностей, выбирая на первой итерации такие дополнения к неполным псевдодальностям, которые минимизируют поправки к начальному приближению координат приемника СРНС. За оценку координат мобильного приемника СРНС принимают координаты, полученные по окончании итерационного процесса. 5 ил.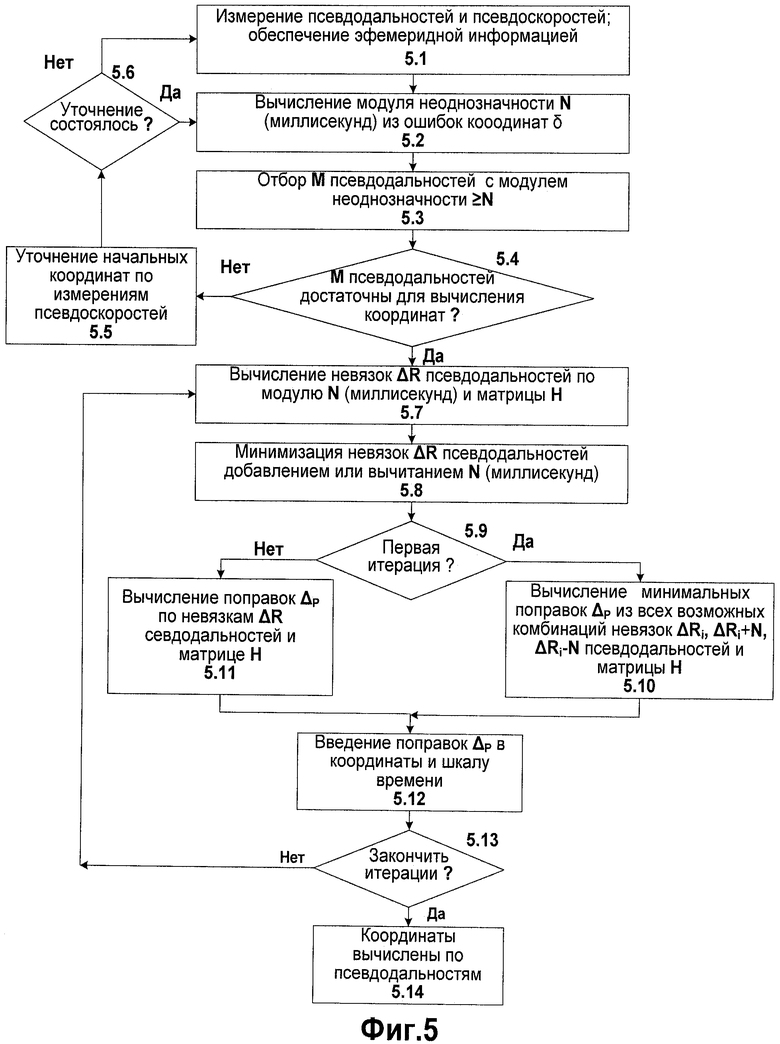
Способ определения координат мобильного приемника спутниковой радионавигационной системы (СРНС), заключающийся в том, что приемник принимает и обрабатывает сигналы космических аппаратов, по результатам этой обработки производят измерения псевдодальностей и псевдоскоростей и выделяют эфемеридную информацию, а по результатам измерений определяют координаты приемника СРНС по измерениям псевдодальностей, согласно следующим этапам:
- на первом этапе вычисляют модуль неоднозначности N из ошибок δ начальных координат приемника СРНС следующим образом: N равно 1 миллисекунде, для значений δ меньше 150 км, и N равно 20 миллисекундам, для значений δ в интервале от 150 до 3000 км,
- на втором этапе выполняют подсчет псевдодальностей с модулем неоднозначности большим или равным N,
и в случае, если таких псевдодальностей не достаточно для вычисления координат приемника СРНС, уточняют начальные координаты по измерениям псевдоскоростей и, если уточнение не состоялось, то снова производят измерения псевдодальностей и псевдоскоростей и выделяют эфемеридную информацию, а если уточнение состоялось, то возвращаются на этап 1, при этом этапы 1, 2 исполняются циклически до тех пор, пока не становится возможным вычисление координат приемника СРНС по псевдодальностям с модулем неоднозначности большим или равным N, после чего на основании полученных начальных координат приемника СРНС, начального приближения для времени измерений и эфемеридной информации переходят непосредственно к итерационному процессу вычисления координат приемника СРНС по измерениям псевдодальностей согласно следующим этапам:
- на третьем этапе, вычисляют модельные значения псевдодальностей, невязки псевдодальностей, определяемые как разность псевдодальностей и их вычисленных модельных значений по модулю N миллисекунд, а также матрицу производных по уточняемым параметрам,
- на четвертом этапе осуществляют минимизацию невязок путем добавления или вычитания N миллисекунд к их вычисленным значениям, после чего переходят к итерационному процессу вычислений координат приемника СРНС по измерениям псевдодальностей, включающему следующие этапы;
- пятый этап, на котором осуществляют вычисление поправок к координатам приемника СРНС по всем возможным в пределах модуля неоднозначности N комбинациям невязок псевдодальностей и матрице производных по уточняемым параметрам, а также находят минимальную из этих поправок,
- шестой этап, на котором осуществляют вычисление поправок к координатам приемника СРНС по невязкам псевдодальностей и матрице производных по уточняемым параметрам,
- седьмой этап, на котором осуществляют добавление поправок к координатам приемника СРНС,
при этом на первой итерации после этапа 4 переходят на этап 5 и далее на этап 7, а на последующих итерациях после этапа 4 переходят на этап 6, далее на этап 7 и, в случае, если поправки к координатам приемника СРНС становятся настолько малы, чтобы обеспечить заданную точность вычисления координат приемника СРНС, итерации прерывают, в противном случае снова переходят к этапу 3 и проводят следующие итерации, а за оценку координат мобильного приемника СРНС принимают те координаты, которые были получены во время последней выполненной итерации.
| US 20040160360 A1, 19.08.2004 | |||
| US 7535414 A1, 11.12.2008 | |||
| СПОСОБ АВТОНОМНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ПОЛЬЗОВАТЕЛЯМИ-АБОНЕНТАМИ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, УГЛОВОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ПЕЛЕНГА ПО ФАЗЕ НЕСУЩЕЙ РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ, РЕТРАНСЛИРУЕМЫХ СПУТНИКАМИ | 2004 |
|
RU2286584C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ОКОНЕЧНОГО УСТРОЙСТВА БЕСПРОВОДНОЙ СВЯЗИ В СМЕШАННОЙ СИСТЕМЕ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2003 |
|
RU2327303C2 |
| US 5680140 A, 21.10.1997 | |||
| US 2009016165 A1, 15.01.2009 | |||
| WO 2006098666 A1, 21.09.2006. | |||

