Изобретение относится к прицельным устройствам и может быть использовано на самолетах-перехватчиках, ведущих атаку воздушных целей в условиях ближнего воздушного боя.
Известен самолетный прицел, содержащий радиолокатор обзора передней полусферы, установленный в носовой части самолета с индикатором, расположенным в кабине самолета в поле зрения пилота, блок связи с ракетами, выход которого соединен со входами ракет ближнего воздушного боя, снабженных головками самонаведения и размещенных под крылом самолета, а также орган управления самолетом по углу крена, при этом радиолокатор обзора передней полусферы содержит антенну с приводами перемещения зеркала по азимуту и наклону, выход которой через высокочастотный коммутатор подключен к передающему и приемному устройству, соединенному с первым входом бортовой цифровой вычислительной машины (БЦВМ) непосредственно, а с ее вторым входом - через автомат захвата, первый выход БЦВМ соединен со входом индикатора, второй выход - со входом блока связи с ракетами, при этом каждый привод перемещения зеркала антенны по азимуту и наклону содержит датчик вал-код, выход которого соединен с сигнальными входами двух пороговых устройств, подключенных через усилитель мощности к приводному двигателю. (Многофункциональные радиолокационные комплексы истребителей, М.: Военное издательство, 1994 г., стр.51, 65)
Недостаток известного прицела заключается в том, что он не позволяет осуществлять атаку высотной воздушной цели при ее внезапном появлении в поле зрения пилота вследствие большого времени, необходимого для прицеливания.
Задачей изобретения является уменьшение времени прицеливания в процессе атаки высотной воздушной цели при ее внезапном появлении в поле зрения пилота.
Решение поставленной задачи достигается тем, что в известный самолетный прицел введены переключатель, блок переключения порогов с двумя парами выходов и запоминающее устройство, а пороговые устройства приводов снабжены дополнительными входами управления, при этом выход переключателя через запоминающее устройство подключен ко входу блока переключения порогов, выходы которого попарно соединены со входами управления пороговых устройств приводов, выход автомата захвата соединен со входом сброса запоминающего устройства, а совмещение зоны обзора радиолокатора с высотной целью, находящейся в поле зрения пилота, осуществляется посредством органа управления самолета по углу крена.
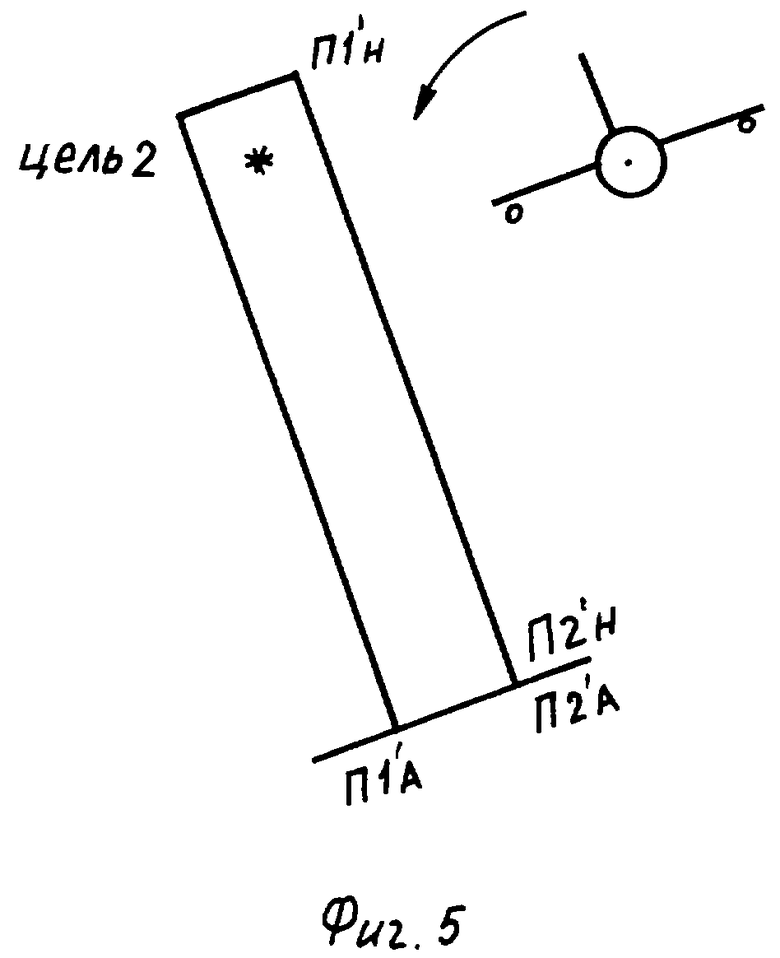
На фиг.1 представлена схема самолетного прицела, на фиг.2 - схема привода антенны радиолокатора обзора передней полусферы, на фиг.3 - вид зоны обзора при отключенном блоке переключения порогов, на фиг.4 - вид зоны обзора при включении блока переключения порогов, на фиг.5 - схема совмещения зоны обзора с высотной целью.
Схема самолетного прицела фиг.1 включает радиолокатор обзора передней полусферы (обозначен на фиг.1 штриховыми линиями), в состав которого входят: антенна 1 высокочастотный коммутатор 2, передающее 3 и приемное 4 устройства, БЦВМ 5, автомат захвата 6, индикатор 7, приводы перемещения зеркала антенны по азимуту 8 и наклону 9. В состав прицела входят также блок связи с ракетами 10, ракеты ближнего боя 11, блок переключения порогов 12, запоминающее устройство 13, переключатель 14. В состав каждого привода (фиг.2) входят: датчик вал-код 15 пороговые устройства 16 и 17, усилитель мощности 18 и приводной двигатель 19, соединенный с зеркалом антенны 20. В состав прицела входят также органы управления самолетом по углу крена 21. На фиг.2а представлена схема изменения углового положения самолета при изменении положения органов управления самолета по углу крена 21.
Выход антенны 1 через высокочастотный коммутатор 2 соединен с передающим 3 и приемным 4 устройством, выход которого подключен к первому входу БЦВМ 5 непосредственно, а к его второму входу через автомат захвата 6. Выходы БЦВМ 5 соединены с индикатором 7 и блоком связи с ракетами 10, выходы которого подключены ко входам ракет ближнего боя 11, размещенных под крылом самолета. Входы управления пороговых устройств 16 и 17 приводов перемещения зеркала антенны 1 по азимуту 8 и наклону 9 попарно соединены с выходами блока переключения порогов 12, вход которого через запоминающее устройство 13 соединен с выходом переключателя 14, установленного в кабине пилота. Выход автомата захвата 6 подключен ко входу сброса запоминающего устройства 13, а сигнальные входы пороговых устройств 16 и 17 соединены с выходом датчика вал-код 15, связанного с зеркалом 20.
Устройство работает следующим образом: при включении прицела в работу зеркало 20 антенны 1 посредством приводов перемещения по азимуту 8 и наклону 9 начинает осуществлять построчный обзор передней полусферы. В момент включения зеркало 20 антенны 1 устанавливается в точку К (Фиг.3) и далее перемещается по первой строке направо по направлению стрелки, при этом с выхода датчика вал-код 15 на вход порогового устройства 16 начинают поступать импульсы, количество которых пропорционально углу поворота зеркала 20 антенны 1 по азимуту. При достижении количества импульсов с датчика вал-код 15, равного порогу срабатывания П2А порогового устройства 16, оно срабатывает, переключая полярность напряжения на выходе усилителя мощности 18 на обратную, изменяя направление движения двигателя 19. Одновременно начинается движение зеркала 20 антенны 1 по наклону, что приводит к изменению количества импульсов с выхода датчика вал-код 15 по величине от порога П1H к порогу П2H. При достижении количества импульсов с датчика вал-код 15 привода по наклону 9 величины порога П2H происходит срабатывание порогового устройства 17, и двигатель 19, осуществив перемещение зеркала на величину ΔH (Фиг.3), останавливается. Зеркало антенны 1 продолжает движение влево по азимуту по второй строке и при достижении количества импульсов с датчика вал-код 15 значения порога П1А, пороговое устройство 16 срабатывает, переключая полярность напряжения с выхода усилителя мощности 18 на противоположную, и процесс повторяется до тех пор пока зеркало не достигнет точки Д, после чего зеркало переходит в исходное положение (Фиг.3 точка К), производя таким образом построчный обзор передней полусферы в зоне, ограниченной углами по азимуту П1А-П2А и по наклону ΔH·n, где n - число строк за время T0 (Фиг.3). При наличии в зоне обзора воздушной цели (Фиг.3 поз. ЦЕЛЬ 1) сигнал, формируемый передающим устройством 3, отражается от нее и через высокочастотный коммутатор 2 поступает на вход приемного устройства, и после усиления и преобразования поступает на вход БЦВМ 5 и автомат захвата 6, которые переводят радиолокатор в режим автосопровождения и выделяют из принятого сигнала информацию, необходимую для пуска ракет, которая со второго выхода БЦВМ 5 подается через блок связи с ракетами 10 на входы ракет ближнего боя 11, подготавливая их к пуску.
В процессе ведения ближнего воздушного боя, характеризующегося резким изменением высот и скоростей полета самолетов, при внезапном появлении высотной цели в верхней части передней полусферы, находящейся вне зоны обзора локатора (Фиг.3 поз. ЦЕЛЬ 2), на дальностях, лежащих от 10 до 15 километров, цель, как правило, визуально обнаруживается пилотом самолета-перехватчика, однако в этой ситуации произвести пуск ракет ближнего боя не представляется возможным из-за большого времени прицеливания Тпр, состоящего из времени перемещения центра зоны обзора (Фиг.3 точка О) в направлении цели Tп и времени цикла построчного обзора вокруг этой точки Тo (показано на фиг.3 штриховыми линиями).
Tпр=Tп+To.
Процесс перевода центра зона обзора в направлении на цель современного радиолокатора занимает время от 3 до 5 с, а время цикла обзора - от 6 до 8 с, вследствие чего цель за это время, как правило, выходит из зоны прямой видимости, поэтому пилот, определив визуально через фонарь пилотской кабины положение цели относительно самолета, производит кратковременное нажатие переключателя 14. Сигнал управления уровня логической 1 поступает через запоминающее устройство 13 на управляющий вход блока переключения порогов 12, по которому он, воздействуя на входы управления, изменяет величины порогов срабатывания пороговых устройств 16 и 17 приводов 8 и 9 перемещения зеркала 20 антенны 1 с величин П1А; П1Н и П2А; П2Н на П1'А; П1'Н и П2'А П2'Н. Для того чтобы обеспечить атаку высотной воздушной цели при ее внезапном появлении необходимо, чтобы зона обзора была вытянута в вертикальной плоскости, то есть чтобы абсолютное значение разности порогов при включении и отключении блока переключения порогов по азимуту удовлетворяло следующему соотношению:
|П2А-П1А|>|П2'А-П1'А|
|П2Н-П1Н|<|П2'Н-П1'Н|
Где П1А;Н, П2А;Н - значения порогов при отключенном блоке переключения порогов,
П1'А;Н, П2'А;Н - значения порогов при включенном блоке переключения порогов.
При наличии порогов срабатывания П1'А, П2'А и П1'Н, П2'Н зеркало 20 антенны 1 начинает производить обзор передней полусферы строками (например, двумя) вытянутыми в вертикальной плоскости (Фиг.4). Пилот, управляя органом управления самолетом по углу крена 21, начинает изменять угол крена, совмещая положение зоны обзора с направлением на цель 2 (Фиг.5 поз. ПОВОРОТ). При совмещении положения антенны с направлением на цель 2 отраженный сигнал от нее с выхода приемного устройства 4 поступает на вход автомата захвата 6, который сравнивает его уровень с величиной порога обнаружения, и при превышении порога срабатывает, выдавая сигнал уровня логической 1 на второй вход БЦВМ, по которому начинается перевод радиолокатора в режим автосопровождения цели 2 по угловым координатам. Одновременно БЦВМ 5 анализирует сигнал, поступающий на ее первый вход с выхода приемного устройства 4, выделяя из него информацию о дальности до цели, скорости сближения, угловом положении цели 2 относительно самолета, сравнивает эту информацию с величиной зоны разрешенных пусков ракет ближнего боя и выдает ее через блок связи с ракетами 10 на входы ракет ближнего боя 11, подготавливая их к пуску. При попадании координат цели 2 в зону разрешенных пусков пилот по индикатору 7 производит пуск ракет, после чего сигнал с выхода автомата захвата 6 поступает на вход сброса запоминающего устройства 6, возвращая схему прицела в исходное положение.
Поворот самолета по углу крена в сочетании с предложенной схемой прицела позволяют осуществить атаку воздушной цели при ее внезапном появлении в поле зрения пилота, поскольку время обзора То строками, вытянутыми в вертикальной плоскости, занимает единицы секунд, а перевод зоны обзора радиолокатора в направлении цели осуществляется изменением угла крена самолета с максимальными угловыми скоростями за минимальное время Тп, что позволяет произвести прицеливание и, при нахождении цели 2 в зоне разрешенных пусков, произвести пуск ракет.
Вновь введенные элементы схемы, такие как блок переключения порогов, запоминающее устройство и переключатель, а также выполнение пороговых устройств с переключающимися порогами, относятся к типовым элементам электронной техники, и не вызывают трудностей при технической реализации предложенного устройства в полном объеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2359202C2 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2379613C2 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2542830C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2544281C1 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2297642C2 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2296342C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ КОНТРОЛЯ САМОЛЕТНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2299447C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
Изобретение относится к прицельным устройствам и может быть использовано на самолетах-перехватчиках, ведущих атаку воздушных целей в условиях ближнего воздушного боя. Технический результат - уменьшение времени прицеливания в процессе атаки высотной воздушной цели при ее внезапном появлении. Сущность изобретения заключается в том, что в самолетный прицел введены переключатель, блок переключения порогов и запоминающее устройство, а совмещение зоны обзора радиолокатора с высотной целью, находящейся в поле зрения пилота, осуществляется посредством перемещения органов управления самолетом по углу крена. 6 ил.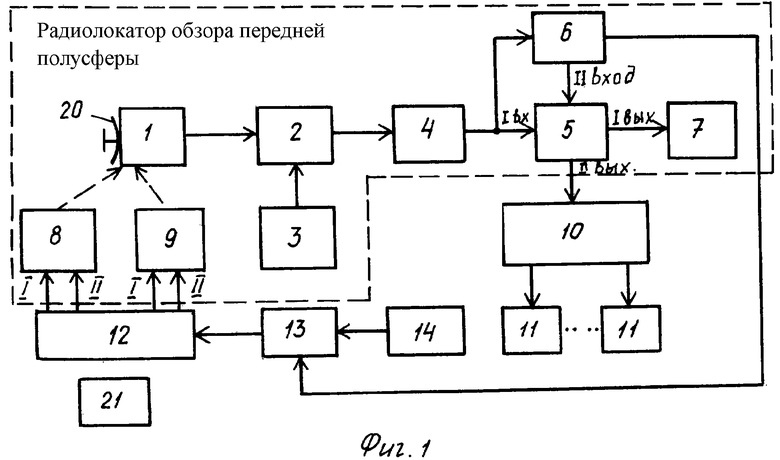
Самолетный прицел, содержащий радиолокатор обзора передней полусферы, установленный в носовой части самолета с индикатором, расположенным в кабине самолета в поле зрения пилота, при этом радиолокатор обзора передней полусферы содержит антенну с приводами перемещения зеркала по азимуту и наклону, выход которой через высокочастотный коммутатор подключен к передающему и приемному устройству, соединенному с первым входом бортовой цифровой вычислительной машины (БЦВМ) непосредственно, а с ее вторым входом - через автомат захвата, выход БЦВМ соединен с входом индикатора, при этом каждый привод перемещения зеркала антенны по азимуту и наклону содержит датчик вал-код, выход которого соединен с сигнальными входами двух пороговых устройств, подключенных через усилитель мощности к приводному двигателю, отличающийся тем, что в него введены переключатель, блок переключения порогов с двумя парами выходов и запоминающее устройство, а пороговые устройства приводов снабжены дополнительными входами управления, при этом выход переключателя через запоминающее устройство подключен к входу блока переключения порогов, выходы которого попарно соединены с входами управления пороговых устройств приводов, выход автомата захвата соединен с входом сброса запоминающего устройства.
| Многофункциональные радиолокационные комплексы истребителей, М., Военное издательство, 1994, с.51, 65 | |||
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2150068C1 |
| US 5331881 A, 26.07.1994 | |||
| US 3848509 A, 19.11.1974. | |||

