Изобретение относится к средствам для контроля параметров радиотехнических устройств и может быть использовано при контроле самолетного радиолокатора, устанавливаемого на самолете-перехватчике, при переходе радиолокатора из режима обзора передней полусферы в режим захвата цели.
Известен способ контроля самолетного радиолокатора при его переходе из режима обзора в режим захвата цели, основанный на формировании контрольного сигнала, имитирующего сигнал цели на дальности, соответствующей режиму захвата, посредством СВЧ-генератора, выходную мощность которого регулируют посредством аттенюатора, включенного на его выходе, излучении контрольного сигнала в направлении зеркала антенны радиолокатора посредством контрольной антенны с игольчатой диаграммой направленности, переводе радиолокатора в режим обзора передней полусферы, визуальном обнаружении контрольного сигнала в виде отметки цели на экране индикатора, переводе радиолокатора в режим захвата посредством совмещения строба захвата с отметкой цели на экране индикатора и нажатия кнопки ЗАХВАТ на пульте управления радиолокатора, и визуальном контроле перехода радиолокатора в режим захвата посредством наблюдения за изменением изображения на экране индикатора. (Многофункциональные радиолокационные комплексы истребителей, М.: Военное издательство, 1994 г., стр.23-27.).
Недостаток известного способа заключается в том, что он не позволяет определить устойчивость захвата цели, поскольку в нем не учитывается точность установки антенны радиолокатора в направлении на цель.
Задачей изобретения является формирование способа контроля, позволяющего определить устойчивость захвата цели самолетным радиолокатором.
Решение поставленной задачи достигается тем, что перед началом излучения контрольного сигнала в направлении радиолокатора зеркало контрольной антенны фиксируют по осям азимута и наклона, в режиме захвата радиолокатора определяют угловое положение зеркала его антенны посредством считывания информации с датчиков угла поворота по осям азимута и наклона, сравнивают угловое положение зеркала антенны радиолокатора с угловым положением зеркала контрольной антенны по осям азимута и наклона и принимают решение о наличии устойчивого захвата цели, если результат сравнения по абсолютному значению лежит в пределах от нуля до 0,2 ширины диаграммы направленности антенны радиолокатора.
На фиг.1 представлена схема контроля самолетного радиолокатора, на фиг.2 - диаграмма перехода зеркала антенны из режима обзора передней полусферы в режим захвата, на фигурах 3, 4 - вид индикатора в процессе перехода радиолокатора в режим захвата, на фигурах 5 и 6 - сечение следа диаграмм направленности контрольной антенны (позиция А) и антенны радиолокатора (позиция Б) в вертикальной плоскости, при их различном взаимном расположении.
В состав схемы контроля (фиг.1) входят генератор СВЧ 1, аттенюатор 2, контрольная антенна 3 с зеркалом 4 и диаграммой направленности 5, радиолокатор 6 с антенной 7, включающей зеркало 8 с диаграммой направленности 9, а так же индикатор 10, кнопку ЗАХВАТ 11, расположенную на пульте управления радиолокатора 12, и датчики угла поворота зеркала 8 по осям азимута и наклона 13 и 14.
Выход генератора СВЧ 1 через аттенюатор 2 соединен со входом контрольной антенны 3, зеркало 4 которой формирует диаграмму направленности 5, ориентированную в сторону радиолокатора 6, включающего антенну 7 с зеркалом 8, имеющую диаграмму направленности 9, направленную в сторону зеркала 4 контрольной антенны 3. Выходы радиолокатора 6 соединены с индикатором 10 и с пультом управления 12, включающим кнопку ЗАХВАТ 11, а с зеркалом 8 антенны 7 соединены датчики его угла поворота по осям азимута 13 и наклона 14.
Режим захвата самолетного радиолокатора является промежуточным между режимом обзора передней полусферы и режимом автосопровождения, при котором антенна радиолокатора направляется на цель и сопровождает ее по угловым координатам. В процессе перехвата воздушной цели в режиме обзора зеркало 8 антенны 7 радиолокатора 6 производит последовательный обзор передней полусферы, и при наличии цели (фиг.2 поз.А) радиолокатор 6 начинает обработку отраженного сигнала и формирует отметку цели на экране индикатора 10, с которой пилот перехватчика начинает совмещать строб захвата (фиг.3) и при их совмещении нажимает кнопку ЗАХВАТ 11. По этой команде зеркало 8, переместившееся к моменту нажатия кнопки ЗАХВАТ 11 в точку В (фиг.2 поз.В), начинает переход из точки В в точку А до их совмещения, при котором отраженный от цели сигнал должен находиться в пределах диаграммы направленности 9 антенны 7 радиолокатора 6.
Способ контроля радиолокатора при его переходе в режим захвата осуществляют следующим образом: посредством генератора СВЧ 1 (фиг.1) формируют контрольный сигнал, имитирующий отраженный сигнал от цели, на дальности, соответствующей дальности захвата, регулируют его по мощности посредством аттенюатора 2, включенного на его выходе, после чего посредством контрольной антенны 3 с игольчатой диаграммой направленности 5 излучают в направлении зеркала 8 антенны 7, затем радиолокатор 6 переводят в режим обзора, при котором зеркало 8 антенны 7 начинает вести построчный обзор передней полусферы, в процессе которого радиолокатор 6 принимает контрольный сигнал и формирует отметку цели на экране индикатора 10 на дальности захвата (фиг.3). При появлении отметки цели на экране индикатора 10 радиолокатор 6 переводят в режим захвата, для чего с отметкой цели совмещают строб захвата (фиг.3), производят нажатие кнопки ЗАХВАТ 11, расположенной на пульте управления радиолокатора 12, и визуально наблюдают за изменением изображения на экране индикатора 10 (фиг.4), по которому определяют переход радиолокатора 6 в режим захвата.
Несмотря на наличие захвата оператор, проводящий контроль, не имеет информации о том, как взаимно ориентированы зеркало контрольной антенны 3 и антенны 7 радиолокатора 6, без которой невозможно сделать вывод о наличии устойчивого захвата.
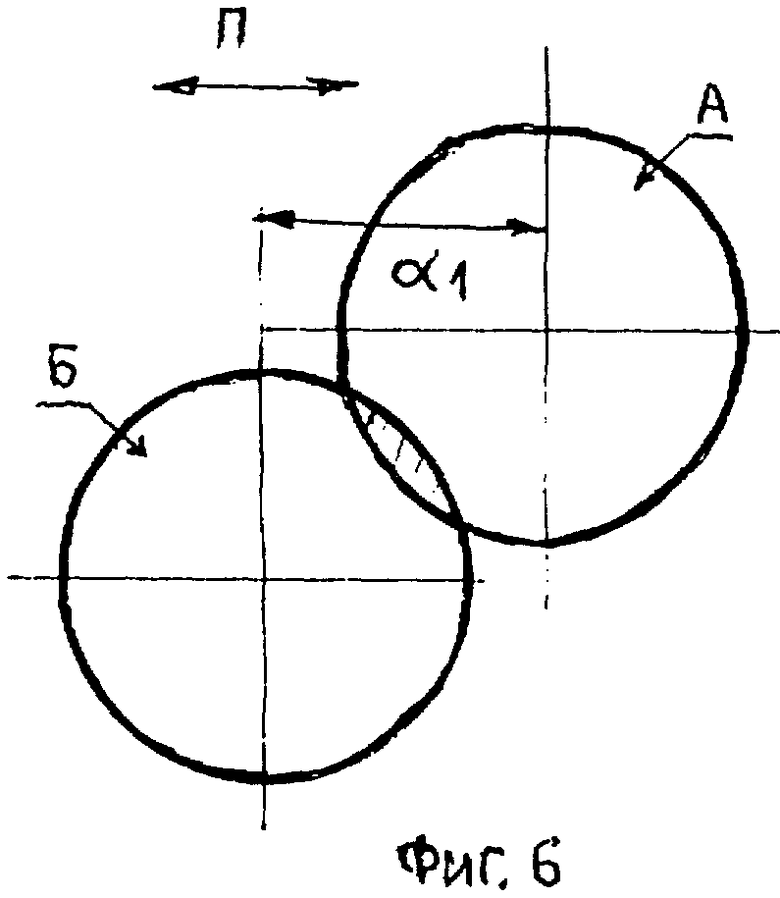
Опыт проектирования и отработки самолетных радиолокаторов показывает, что устойчивым захват считается в том случае, когда сечение следа диаграмм направленности контрольной антенны 5 и антенны радиолокатора 6 соосны (фиг.1, угол α=0) или максимально отличаются на угол α, абсолютное значение которого не превосходит величины 0,2 ширины диаграммы направленности антенны радиолокатора. При таком отклонении перекрытие следа диаграмм направленности по площади составляет величину не менее 80% (фиг.5 заштрихованная область). При больших значениях отклонения α1 величина перекрытия уменьшается и в процессе перехвата воздушных целей, характеризующегося воздействием помех и других поражающих факторов, зеркало 8, осуществляет колебательные движения, с амплитудой П (фиг.6 стрелка П), при воздействии которых при α1 возможен выход цели за диаграмму направленности антенны 8 (фиг.6), что приводит к неустойчивому захвату и, как следствие, к потере цели.
Для определения устойчивости захвата в процессе контроля до начала излучения контрольного сигнала в направлении радиолокатора 6 зеркало 4 контрольной антенны 3 фиксируют по осям азимута и наклона. Затем проводят операции по переходу радиолокатора 6 в режим захвата и при его осуществлении определяют угловое положение зеркала 8 антенны 7 посредством считывания информации с датчиков угла поворота по осям азимута и наклона 13 и 14, после чего сравнивают угловое положение зеркала 8 радиолокатора 6 с угловым положением зеркала 4 контрольной антенны 3 по осям азимута и наклона и принимают решение о наличии устойчивого захвата по результату сравнения.
Так, при установке зеркала 4 контрольной антенны 3 в нулевое положение отклонение углового положения зеркала 8 антенны 7 от направления на контрольную антенну 3 будет равно показаниям датчиков угла поворота зеркала 8 по осям азимута и наклона 13 и 14, при этом устойчивым захват считают при отклонении углового положения зеркала антенны 7 радиолокатора 6 от направления на контрольную антенну 3, лежащим по абсолютному значению в пределах от нуля до 0,2 ширины диаграммы направленности антенны 7 радиолокатора 6.
Введение новых операций, таких как фиксирование углового положения зеркала контрольной антенны и определение углового положения антенны радиолокатора в режиме захвата посредством считывания информации с датчиков угла поворота зеркала по осям азимута и наклона и их сравнение позволяют определить угловое отклонение зеркала антенны радиолокатора от направления на контрольную антенну и по результату сравнения сделать вывод о наличии устойчивого захвата цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ САМОЛЕТНОГО РАДИОЛОКАТОРА | 2007 |
|
RU2358278C2 |
| СПОСОБ КОНТРОЛЯ КОМПЕНСАЦИОННОГО КАНАЛА САМОЛЕТНОГО РАДИОЛОКАТОРА | 2007 |
|
RU2321019C1 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2005 |
|
RU2296286C1 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2359202C2 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2297642C2 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2379613C2 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2234714C2 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2542830C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЙСКОВОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2102772C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2544281C1 |
Изобретение относится к средствам для контроля параметров радиотехнических устройств и может быть использовано при контроле самолетного радиолокатора, устанавливаемого на самолете-перехватчике, при переходе радиолокатора из режима обзора передней полусферы в режим захвата цели. Техническим результатом является формирование способа контроля, позволяющего сделать вывод о наличии устойчивого захвата цели самолетным радиолокатором. Решение поставленной задачи достигается тем, что перед началом излучения контрольного сигнала в направлении радиолокатора зеркало контрольной антенны фиксируют по осям азимута и наклона, в режиме захвата радиолокатора определяют угловое положение зеркала его антенны посредством считывания информации с датчиков угла поворота по осям азимута и наклона, сравнивают угловое положение зеркала антенны радиолокатора с угловым положением зеркала контрольной антенны по осям азимута и наклона и принимают решение о наличии устойчивого захвата цели, если результат сравнения по абсолютному значению лежит в пределах от нуля до 0,2 ширины диаграммы направленности антенны радиолокатора. 6 ил.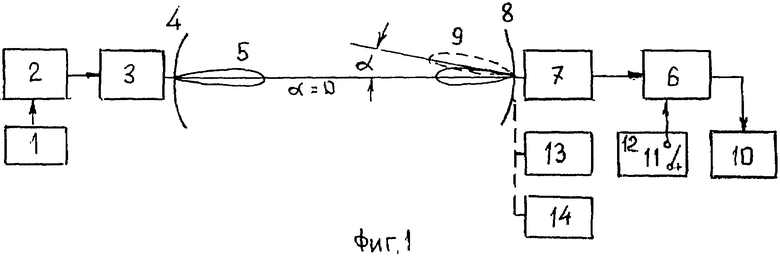
Способ контроля самолетного радиолокатора при его переходе из режима обзора в режим захвата цели, основанный на формировании контрольного сигнала, имитирующего сигнал цели на дальности соответствующей режиму захвата, посредством СВЧ генератора, выходную мощность которого регулируют посредством аттенюатора, включенного на его выходе, излучении контрольного сигнала в направлении зеркала антенны радиолокатора посредством контрольной антенны с игольчатой диаграммой направленности, переводе радиолокатора в режим обзора передней полусферы, визуальном обнаружении контрольного сигнала в виде отметки цели на экране индикатора, переводе радиолокатора в режим захвата посредством совмещения строба захвата с отметкой цели на экране индикатора и нажатия кнопки ЗАХВАТ на пульте управления радиолокатора, и визуальном контроле перехода радиолокатора в режим захвата посредством наблюдения за изменением изображения на экране индикатора, отличающийся тем, что перед началом излучения контрольного сигнала в направлении радиолокатора зеркало контрольной антенны фиксируют по осям азимута и наклона, в режиме захвата радиолокатора определяют угловое положение зеркала его антенны посредством считывания информации с датчиков угла поворота по осям азимута и наклона, сравнивают угловое положение зеркала антенны радиолокатора с угловым положением зеркала контрольной антенны по осям азимута и наклона и принимают решение о наличии устойчивого захвата цели, если результат сравнения по абсолютному значению лежит в пределах от нуля до 0,2 ширины диаграммы направленности антенны радиолокатора.
| Многофункциональные радиолокационные комплексы истребителей | |||
| - М.: Военное издательство, 1994, с.23-27 | |||
| МИШЕНЬ ДЛЯ ЮСТИРОВКИ ДВУХДИАПАЗОННОЙ БОРТОВОЙ РЛС | 2000 |
|
RU2196343C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОЙ ЮСТИРОВКИ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1997 |
|
RU2133477C1 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| US 5051752 A, 24.09.2001 | |||
| US 6233008 A, 15.05.2001. | |||

