Изобретение относится к радиолокационной технике и может быть использовано в самолетных радиолокаторах, преимущественно импульсно-доплеровских, устанавливаемых на самолетах-перехватчиках, ведущих атаку воздушных целей.
Известен самолетный радиолокатор, содержащий антенну с приводами перемещения зеркала по осям азимута и наклона и датчиками вал-код по каждой оси, соединенные с блоком управления антенны, при этом антенна через высокочастотный коммутатор соединена с передающим и приемным устройством, выход автоматической регулировки сигнала (АРУС) и выходы доплеровских фильтров которого подключены к входам блока обработки информации, выход которого соединен с входом индикатора, а также задающий генератор (Многофункциональные радиоэлектронные комплексы истребителей. М.: Военное издательство, 1994 г., стр.35).
Недостаток известного радиолокатора заключается в том, что он не позволяет осуществлять обзор передней полусферы при групповом полете двух перехватчиков в режиме полета «один за другим».
Задачей изобретения является создание радиолокатора, позволяющего при групповом полете двух перехватчиков в режиме полета «один за другим» осуществлять обзор передней полусферы.
Решение поставленной задачи достигается тем, что в известный самолетный радиолокатор введен регулируемый аттенюатор и блок управления аттенюатором с тремя входами, при этом его первый вход соединен с выходом датчика вал-код привода антенны по азимуту, а второй и третий входы соединены с выходом АРУС и выходом доплеровского фильтра, на выходе которого формируется сигнал уровня логической единицы при скорости сближения, равной нулю приемного устройства, а выход блока управления аттенюатором подключен к управляющему входу регулируемого аттенюатора, включенному между задающим генератором и передающим устройством, при этом блок управления аттенюатором содержит элемент И, ключ, счетчик импульсов, пороговое и запоминающее устройства, при этом первый вход блока управления аттенюатором подключен к счетному входу счетчика импульсов, выход которого через пороговое устройство соединен с управляющим входом ключа, сигнальный вход которого через запоминающее устройство соединен с выходом элемента И, входы которого соединены со вторым и третьим входами блока управления аттенюатором, выход ключа соединен с выходом блока управления аттенюатором, а управляющие входы счетчика импульсов и запоминающего устройства подключены соответственно к выходам запоминающего и порогового устройства.
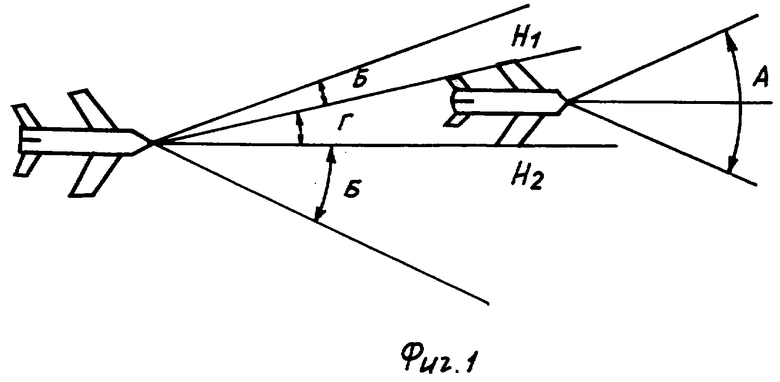
На фиг.1 представлена схема расположения перехватчиков при групповом полете «один за другим», на фиг.2 - схема самолетного радиолокатора, на фиг 3 - схема блока управления аттенюатором.
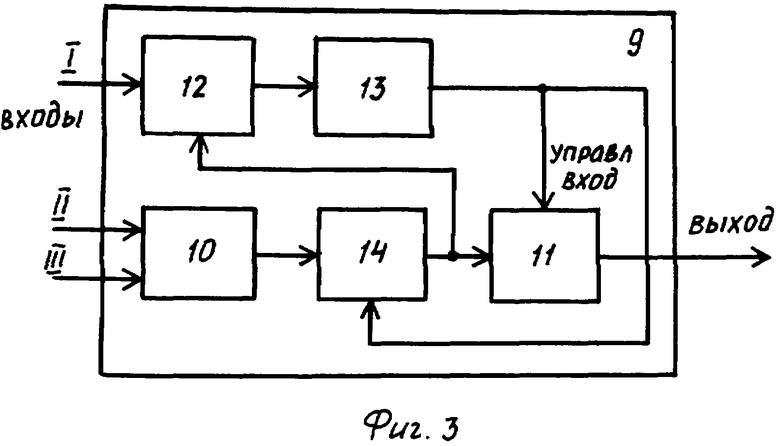
В состав самолетного радиолокатора (фиг.2) входят: антенна 1, высокочастотный коммутатор 2, передающее 3 и приемное 4 устройства, блок обработки информации 5, индикатор 6, задающий генератор 7, регулируемый аттенюатор 8, блок управления аттенюатором 9, который (фиг.3) содержит элемент И 10, ключ 11, счетчик импульсов 12, пороговое устройство 13 и запоминающее устройство 14. В состав антенны 1 входят приводы перемещения зеркала по оси азимута 15 и наклона 16 с датчиками вал-код по каждой оси 17 и 18 и блок управления антенной 19.
Антенна 1 с приводами перемещения зеркала по осям азимута 15 и наклона 16 с датчиками вал-код на каждой оси 17 и 18, соединенными с блоком управления антенной 19, соединена через высокочастотный коммутатор 2 с передающим 3 и приемным 4 устройствами, выходы доплеровских фильтров и выход АРУС которого подключены ко входам блока обработки информации 5, выход которого соединен со входом индикатора 6. Первый вход блока управления аттенюатором 9 соединен с выходом датчика вал-код антенны по азимуту, второй и третий входы подключены соответственно - к выходу АРУС и выходу доплеровского фильтра, на выходе которого формируется сигнал уровня логической единицы при скорости сближения, равной нулю приемного устройства 4, а выход блока управления аттенюатором 9 подключен к управляющему входу регулируемого аттенюатора 8, включенному между задающим генератором 7 и передающим устройством 3. Первый вход блока управления аттенюатором 9 подключен к счетному входу счетчика импульсов 12, выход которого через пороговое устройство 13 соединен с управляющим входом ключа 11, сигнальный вход которого через запоминающее устройство 14 подключен к выходу элемента И 10, входы которого соединены со вторым и третьим входами блока управления аттенюатором 9, выход ключа 11 соединен с выходом блока управления аттенюатором 9, а управляющие входы счетчика импульсов 12 и запоминающего устройства 14 подключены соответственно к выходам запоминающего устройства 14 и порогового устройства 13.
Устройство работает следующим образом: при полете перехватчиков в режиме полета «один за другим» при включении локатора первым перехватчиком обзор передней полусферы производится в секторе А (фиг.1). При включении локатора вторым перехватчиком обзор передней полусферы начинает производиться в зоне Б (фиг.1). В этих секторах антенны обоих локаторов производят обзор свободного пространства передней полусферы без каких-либо мешающих предметов, при котором сигналы на выходе АРУС и доплеровского фильтра, на выходе которого формируется сигнал уровня логической единицы при скорости сближения, равной нулю приемного устройства 4, равны нулю и соответственно сигнал на выходе элемента И 10 равен нулю. В исходном состоянии схемы блока 9 сигнал на выходе порогового устройства 13 и запоминающего устройства 14 равны нулю, при управляющем сигнале нулевого уровня ключ 11 и запоминающее устройство 14 находятся в открытом состоянии, а счетчик импульсов 12 - в закрытом (Здесь и далее при описании работы логических схем приняты таблицы истинности, приведенные в К.Титце, У.Шенк. Полупроводниковая схемотехника. М.: Мир, 1982, стр.103).
При нулевом уровне сигнала на выходе элемента И 10 он, пройдя через запоминающее устройство 14, оставляет закрытым счетчик импульсов 12 и, пройдя ключ 11, подается на выход блока управления аттенюатором 9 и далее на вход управляемого аттенюатора 8. При подаче сигнала уровня логического нуля затухание аттенюатора 8 становится равным нулю (при подаче сигнала уровня логической единицы затухание максимально), при этом мощность от задающего генератора 7 через передающее устройство 3 и высокочастотный коммутатор 2 поступает в антенну 1 без потерь, обеспечивая обзор передней полусферы в штатном режиме.
При дальнейшем перемещении антенны второго перехватчика по азимуту и достижении ее точки H1 в секторе Г (фиг.1) происходит облучение первого перехватчика потоком высокочастотной энергии. Отраженный сигнал большой мощности поступает на вход приемного устройства 4 второго перехватчика, при котором приемное устройство работает в режиме перегрузки, сигнал на выходе АРУС равен уровню логической единицы, а в устройствах обработки информации появляются сбои, выводящие аппаратуру из строя. Кроме того, воздействие мощного сигнала на первый перехватчик вследствие переотражения от контуров фюзеляжа создает высокий уровень помех на входе локатора первого перехватчика, вследствие чего он также оказывается неработоспособным.
Ввиду одинаковости скоростей полета первого и второго перехватчиков (скорость сближения равна нулю) на выходе доплеровского фильтра при скорости сближения, равной нулю, также формируется сигнал уровня логической единицы, которые подаются на второй и третий входы блока управления аттенюатором 9 и далее на входы элемента И 10. При наличии двух сигналов на входах элемента И 10 уровня логической единицы на его выходе также формируется сигнал уровня логической единицы, который поступает на вход запоминающего устройства 14 и с его выхода - на управляющий вход счетчика импульсов 12, по которому он начинает счет импульсов, поступающих на его счетный вход с выхода датчика вал-код привода перемещения зеркала антенны 1 по азимуту.
Одновременно сигнал уровня логической единицы с выхода элемента И 10 поступает на вход запоминающего устройства 14 и с его выхода на управляющий вход ключа 11 и далее через выход блока управления аттенюатором 9 на управляющий вход регулируемого аттенюатора 8, увеличивая затухание до максимальной величины, в результате чего сигнал с задающего генератора 7, поступающий на вход передающего устройства 3, становится равным нулю, поток высокочастотной энергии локатора второго перехватчика также уменьшается до нуля, не создавая помех работе первого перехватчика до тех пор, пока зеркало антенны не доходит до точки Н2, то есть находится в пределах сектора Г.
При выходе зеркала антенны 1 второго перехватчика из сектора Г количество импульсов с датчика вал-код 17 привода антенны по азимуту 15, поступающее на вход счетчика импульсов 12, достигает величины порога срабатывания порогового устройства 13, устанавливаемого исходя из заданного режима полета, вследствие чего он срабатывает и сигнал с его выхода становится равным уровню логической единицы. Этот сигнал, поступая на управляющий вход ключа 11, производит обнуление сигнала на его выходе и соответственно на управляющем входе регулируемого аттенюатора 8, при котором его затухание становится равным нулю и локатор переходит в штатный режим обзора передней полусферы. Одновременно, поступая на вход сброса запоминающего устройства 14, сигнал с выхода порогового устройства 13 обнуляет записанную в нем информацию, возвращая схему блока 9 в исходное состояние.
Таким образом, введение в известное устройство регулируемого аттенюатора и блока управления аттенюатором и предложенная схема его выполнения позволяют обеспечить обзор передней полусферы двух самолетов перехватчиков при их совместном полете в режиме полета "один за другим", а выполнение блока управления аттенюатором в виде набора типовых элементов электронной техники позволяет без труда произвести техническую реализацию предложения в полном объеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2359202C2 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2005 |
|
RU2296286C1 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2296342C1 |
| СПОСОБ КОНТРОЛЯ САМОЛЕТНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2299447C1 |
| СПОСОБ КОНТРОЛЯ САМОЛЕТНОГО РАДИОЛОКАТОРА | 2007 |
|
RU2358278C2 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2544281C1 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2379613C2 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2542830C1 |
Изобретение относится к радиолокационной технике и может быть использовано в самолетных радиолокаторах, преимущественно импульсно-доплеровских, устанавливаемых на самолетах-перехватчиках, ведущих атаку воздушных целей. Технический результат заключается в обеспечении обзора передней полусферы при групповом полете двух перехватчиков в режиме полета «один за другим». Технический результат достигается тем, что в известный самолетный радиолокатор, содержащий антенну с приводами перемещения зеркала по осям азимута и наклона с датчиками вал-код привода по каждой оси, блок управления антенной, высокочастотный коммутатор, передающее и приемное устройство, автоматическую регулировку сигнала (АРУС), доплеровские фильтры, блок обработки информации, индикатор и задающий генератор, введены регулируемый аттенюатор и блок управления аттенюатором. 1 з.п. ф-лы, 3 ил.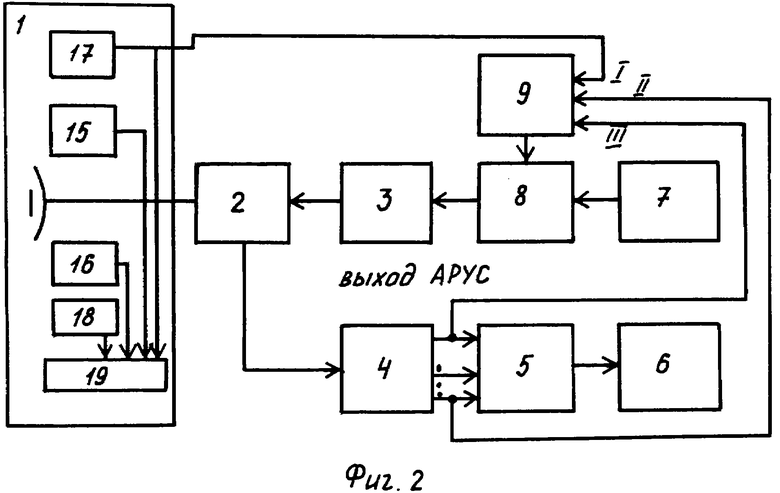
| Многофункциональные радиоэлектронные комплексы истребителей, Москва, Военное издательство, 1994, с.35 | |||
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РЛС | 1995 |
|
RU2084921C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| US 2003090405 A1, 15.05.2003 | |||
| US 5400032 A, 21.03.1995 | |||
| US 4160248, 03.07.1979. | |||

