Изобретение относится к прицельным устройствам и может быть использовано на самолетах-перехватчиках, ведущих атаку воздушных целей в условиях ближнего воздушного боя.
Известен самолетный прицел, содержащий радиолокатор обзора передней полусферы, установленный в носовой части самолета с индикатором, расположенным в кабине самолета в поле зрения пилота, при этом радиолокатор обзора передней полусферы содержит зеркальную антенну с приводами перемещения зеркала по азимуту и наклону, выход которой через высокочастотный коммутатор подключен к передающему и приемному устройству, соединенному с первым входом бортовой цифровой вычислительной машины (БЦВМ) непосредственно, а с ее вторым входом - через автомат захвата, выход БЦВМ, соединен с входом индикатора, при этом каждый привод перемещения зеркала антенны по азимуту и наклону содержит датчик вал-код, выход которого соединен с сигнальными входами первого и второго пороговых устройств, подключенных через усилитель мощности к приводному двигателю. Кроме того, прицел содержит переключатель, блок переключения порогов с двумя парами выходов и запоминающее устройство, а пороговые устройства приводов снабжены дополнительными входами управления, при этом выход переключателя через запоминающее устройство подключен к блоку переключения порогов, выходы которого попарно соединены с входами управления первого и второго пороговых устройств приводов, выход автомата захвата соединен с входом сброса запоминающего устройства (патент №2296286, RU, 27.03.2207 г.).
Недостаток известного устройства - большое время обзора при атаке воздушной цели, уменьшающее время, необходимое для прицеливания и пуска ракет.
Задачей изобретения является уменьшение времени обзора при атаке воздушной цели.
Решение поставленной задачи достигается тем, что в схему известного самолетного прицела введено устройство задержки, а привод перемещения зеркала антенны по наклону снабжен третьим управляющим входом, коммутатором и третьим пороговым устройством, при этом сигнальный вход третьего порогового устройства соединен с датчиком вал-код привода, а его выход и выход второго порогового устройства через сигнальные входы коммутатора подключены к входу усилителя мощности, управляющий вход коммутатора соединен с третьим управляющим входом привода, а устройство задержки включено между третьим управляющим входом привода и выходом запоминающего устройства.
На фиг.1 представлена схема самолетного прицела, на фиг.2 - схема привода перемещения зеркала антенны по азимуту, на фиг.3 - схема привода перемещения зеркала антенны по наклону, а на фиг.4 - вид зоны обзора при атаке воздушной цели..
В состав прицела (фиг.1) входят зеркальная антенна 1, высокочастотный коммутатор 2, передающее 3 и приемное 4 устройства, БЦВМ 5, автомат захвата 6, индикатор 7, привод перемещения зеркала антенны по азимуту 8, привод перемещения зеркала антенны по наклону 9, устройство задержки 11, блок управления порогами 12, запоминающее устройство 13 и переключатель 14.
В состав привода перемещения зеркала антенны по азимуту 8 (фиг. 2) входят датчик вал-код 15, первое и второе пороговые устройства 16 и 17, усилитель мощности 18, приводной двигатель 19, а в состав привода перемещения зеркала антенны по наклону 9 (фиг.3) входят датчик вал-код 15, первое и второе пороговые устройства 15 и 16, усилитель мощности 18, приводной двигатель 19, а также коммутатор 10 и третье пороговое устройство 20 с порогом срабатывания П1*Н.
Выход зеркальной антенны 1 через высокочастотный коммутатор 2 соединен с передающим 3 и приемным 4 устройством, выход которого подключен к первому входу БЦВМ 5 непосредственно, а к ее второму входу - через автомат захвата 6. Выход БЦВМ 5 соединен с индикатором 7. Сигнальные входы первого и второго пороговых устройств 16 и 17 приводов перемещения зеркала антенны 1 по азимуту 8 и наклону 9 соединены с выходом датчика вал-код 15, связанного с зеркалом антенны 1. Входы управления первого и второго пороговых устройств 16 и 17 приводов перемещения зеркала антенны 1 по азимуту 8 и наклону 9 попарно соединены с выходами блока переключения порогов 12, вход которого через запоминающее устройство 13 соединен с выходом переключателя 14 установленного в кабине пилота.
В схеме привода перемещения зеркала по наклону 9 вход третьего порогового устройства 20 соединен с датчиком вал-код 15 привода 9, его выход и выход второго порогового устройства 17 через сигнальные входы коммутатора 10 подключены к входу усилителя мощности 18. Управляющий вход коммутатора 10 через третий вход привода 9 и устройство задержки 11 соединен с выходом запоминающего устройства 13. При отсутствии сигнала на управляющем входе коммутатора 10 к входу усилителя мощности 18 подключен выход первого порогового устройства 16.
Устройство работает следующим образом: в исходном состоянии переключатель 14 отжат, на его выходе формируется сигнал уровня логического нуля, поэтому на выходах запоминающего устройства 13, управляющем входе коммутатора 10 и на входе блока переключения порогов 12 он также соответствует уровню логического нуля. Блок переключения порогов 12 находится в выключенном состоянии, при котором на его первых выходах имеется сигнал уровня логической единицы, а на вторых выходах - уровня логического нуля. При этом к входам усилителей мощности 18 приводов 8 и 9 подключены пороговые устройства 16 и 17, формирующие пороги П1А и П2А по азимуту и П1н и П2н по наклону, в результате чего зеркало антенны 1 производит построчный обзор пространства в зоне, ограниченной этими порогами (фиг.4, поз. ЗОНА Б).
В процессе ведения ближнего воздушного боя, характеризующегося резким изменением высот и скоростей полета самолетов, при внезапном появлении высотной цели в верхней части передней полусферы, находящейся вне зоны обзора локатора (Зона С на фиг.4), на дальностях, лежащих в пределах от 10 до 15 километров, она обнаруживается пилотом самолета-перехватчика. Определив визуально через фонарь пилотской кабины положение высотной цели относительно продольной оси самолета пилот производит кратковременное нажатие переключателя 14.
При нажатии переключателя 14 сигнал уровня логической единицы через запоминающее устройство 13 поступает на вход устройства задержки 11 и на управляющий вход блока управления порогами 12. По этому сигналу блок управления порогами 12 изменяет величины управляющих сигналов на своих первых и вторых выходах на противоположные, подключая к входу усилителя мощности 18 привода перемещения зеркала по азимуту 8 второе пороговое устройство 17. Ввиду наличия устройства задержки 11 (с временем задержки, равным времени одной строки перемещения зеркала антенны 1 по наклону) на управляющем входе коммутатора 10 сигнал также равен нулю, и к входу усилителя мощности 18 привода перемещения зеркала по наклону 9 также подключен выход второго порогового устройства 17 вследствие чего пороги срабатывания приводов перемещения антенны 8 и 9 скачком изменяются с величин П1А и П2А и П1н и П2н на П1' А и П2'А и П1'н и П2'н, в результате чего зона обзора формируется вытянутой в вертикальной плоскости (фиг.4, зона, ограниченная точками АСДF). При изменении порогов зеркало антенны 1 посредством приводов перемещения по азимуту 8 и наклону 9 устанавливается в исходное положение (Фиг.4, точка А, координата которой соответствует порогу П1'н), и далее посредством привода 9 начинает перемещаться по строке вверх по направлению стрелки от точки А к точке С (от порога П1'н к порогу П2'н). При движении зеркала по строке количество импульсов с датчика вал-код 15 увеличивается и при их достижении величины, равной порогу срабатывания П2'н порогового устройства 16 (Фиг.4, точка С), оно срабатывает, переключая полярность напряжения на выходе усилителя мощности 18 на обратную, изменяя направление движения двигателя 19.
При достижении зеркалом антенны 1 точки С:
- кончается время задержки устройства 11, равное времени прохождения зеркалом антенны 1 одной строки по наклону, и сигнал уровня логической единицы с выхода устройства задержки 11 через третий вход привода перемещения зеркала антенны по наклону 9 поступает на управляющий вход коммутатора 19, по которому он срабатывает, изменяя порог срабатывания привода 9 с П1'н на П1∗ н (фиг.4),
- начинается движение зеркала антенны 1 по азимуту, при котором количество импульсов с выхода датчика вал-код 15 привода перемещения зеркала по азимуту 8 (фиг.2) изменяется по величине от порога П2'A к порогу П1'A, и при достижении количества импульсов с датчика вал-код 15 величины порога П1А происходит срабатывание порогового устройства 17, в результате чего двигатель 19 привода по азимуту, осуществив перемещение зеркала на величину СД (Фиг.4) останавливается, при этом зеркало антенны продолжает движение вниз по наклону по второй строке от точки Д к точке Е и при достижении количества импульсов с датчика вал-код 15 привода перемещения зеркала по наклону 9 величине порога П1∗ н пороговое устройство 16 срабатывает, переключая полярность напряжения с выхода усилителя мощности 18 на противоположную, в результате чего начинается перемещение зеркала антенны 1 по азимуту из точки Е в точку В - точку исходного положения, и процесс повторяется, а антенна 1 начинает производить обзор передней полусферы зоной обзора, ограниченной точками ВСДЕ (фиг.4).
В это время пилот, управляя органами управления самолетом по крену, начинает совмещать положение зоны обзора (зону ВСДЕ) с направлением на цель (Фиг.4, поз. ПОВОРОТ), и при совмещении зоны обзора антенны 1 с направлением на цель (фиг.4, поз. ЦЕЛЬ) сигнал, формируемый передающим устройством 3, отражается от нее и через высокочастотный коммутатор 2 поступает на вход приемного устройства 4, и после усиления и преобразования подается на вход БЦВМ 5, автомат захвата 6 и индикатор 7. Автомат захвата 6 срабатывает, переводя радиолокатор в режим сопровождения, при котором БЦВМ 5 вырабатывает сигналы, необходимые для пуска ракет ближнего боя, и при нахождении цели в зоне разрешенных пусков пилот производит их пуск.
Одновременно при срабатывании автомата захвата 6 сигнал уровня логической единицы с его выхода поступает на вход сброса запоминающего устройства 13, возвращая схему прицела в исходное положение.
Уменьшение зоны обзора с величины, ограниченной точками АСДF до величины, ограниченной точками ВСДЕ, позволяет сократить время обзора и тем самым уменьшить время прицеливания по высотной цели при ее внезапном появлении в верхней части передней полусферы.
Введенные в схему прицела коммутатор, устройство задержки и пороговое устройство относятся к типовым элементам электронной техники, вследствие чего не вызывают трудностей при технической реализации предложенного устройства в полном объеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2005 |
|
RU2296286C1 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2379613C2 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2542830C1 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2297642C2 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2544281C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2296342C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
Изобретение относится к прицельным устройствам и может быть использовано на самолетах-перехватчиках, ведущих атаку воздушных целей в условиях ближнего воздушного боя. Технический результат - уменьшение времени обзора при атаке воздушной цели. Решение поставленной задачи достигается тем, что в схему самолетного прицела введено устройство задержки, а привод перемещения зеркала антенны по наклону снабжен третьим управляющим входом, коммутатором и третьим пороговым устройством. При этом сигнальный вход третьего порогового устройства соединен с датчиком вал-код привода, а его выход и выход второго порогового устройства через сигнальные входы коммутатора подключены к входу усилителя мощности. Управляющий вход коммутатора соединен с третьим управляющим входом привода, а устройство задержки включено между третьим управляющим входом привода и выходом запоминающего устройства. 4 ил.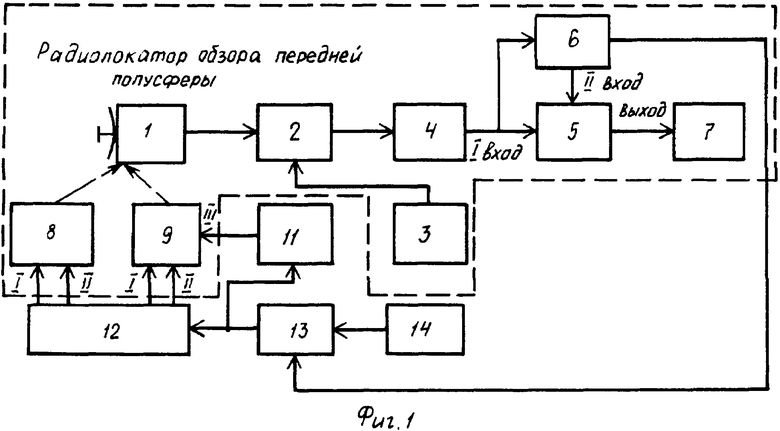
Самолетный прицел, содержащий переключатель, блок переключения порогов с двумя парами выходов, запоминающее устройство, радиолокатор обзора передней полусферы, установленный в носовой части самолета, с индикатором, расположенным в кабине самолета в поле зрения пилота, при этом радиолокатор обзора передней полусферы содержит зеркальную антенну с приводами перемещения зеркала по азимуту и наклону, выход которой через высокочастотный коммутатор подключен к передающему и приемному устройствам, причем выход приемного устройства соединен с первым входом бортовой цифровой вычислительной машины (БЦВМ) непосредственно, а с ее вторым входом - через автомат захвата, при этом выход БЦВМ соединен с входом индикатора, а каждый привод перемещения зеркала антенны по азимуту и наклону содержит датчик вал-код, выход которого соединен с сигнальными входами первого и второго пороговых устройств, подключенных через усилитель мощности к приводному двигателю, причем первое и второе пороговые устройства содержат входы управления, при этом выход переключателя через запоминающее устройство подключен к блоку переключения порогов, выходы которого попарно соединены с входами управления первого и второго пороговых устройств, а выход автомата захвата соединен с входом сброса запоминающего устройства, отличающийся тем, что он снабжен устройством задержки, а привод перемещения зеркала антенны по наклону снабжен коммутатором и третьим пороговым устройством и содержит третий управляющий вход, при этом сигнальный вход третьего порогового устройства соединен с датчиком вал-код, а его выход и выход второго порогового устройства через сигнальные входы коммутатора подключены к входу усилителя мощности, управляющий вход коммутатора соединен с третьим управляющим входом привода, а устройство задержки включено между третьим управляющим входом привода и выходом запоминающего устройства.
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2005 |
|
RU2296286C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2150068C1 |
| US 5331881 A, 26.07.1994 | |||
| US 3848509 A, 19.11.1974. | |||

